反無人機用空間條網牽引展開仿真與試驗研究
2022-10-11 01:25:00劉一鳴熊自明陳曦仲思東王德榮
兵工學報 2022年9期
劉一鳴, 熊自明, 陳曦, 仲思東, 王德榮
(1.陸軍工程大學 爆炸沖擊防災減災國家重點實驗室, 江蘇 南京 210007;2.南京理工大學 機械工程學院, 江蘇 南京 210094; 3.武漢大學 電子信息學院, 湖北 武漢 430079)
0 引言
在現代化戰爭中,作戰無人機由于其機動靈活、隱蔽性突出、毀傷效能高等諸多優勢,廣泛應用于現今高科技的局部戰爭和沖突中。當前作戰無人機的反制武器主要有防空高炮、多管火箭炮以及地空導彈。面對無人機日益信息化、集成化和智能化的發展趨勢,上述反制武器“點對點式攔截”漸顯不足,效費比相對較低。作為新型柔性結構的主動攔截技術,空間條網通過發射牽引體將儲網裝置中的條網拉出,隨后條網在空中迅速展開成型,在上升段較為飽滿的弧形姿態下,目標距離傳感器控制空間條網掛載的爆炸成型彈丸(EFP)高能戰斗部起爆,進而對來襲無人機進行打擊毀傷,該種攔截方式“以面攔點”,能夠有效彌補傳統防空反制武器攔截時空窗口小的缺點,經濟性好,起到了近程攔截防護“守門員”的作用。
空間柔性網這一概念最早是在Furoshiki的衛星任務中,由Nakasuka等提出。隨著人類對太空領域的不斷探索,不可避免地產生了一些空間碎片和廢棄衛星,對人造衛星、空間站等在役航天器的正常運作造成了嚴重的安全隱患。初期對于空間柔性網的研究主要集中在軌道碎片等太空非合作目標捕獲領域,國防科技大學、清華大學以及哈爾濱工業大學等多所國內院校對空間柔性網的動力學特性進行了相關理論分析、建模仿真和試驗探究,從柔性網的網型優化、內力分布、繩網位形以及牽拉模式等多個角度,較為系統地研究分析了柔性網在太空環境中捕獲非合作目標時的發射展開性能和動力學特性。其中,高慶玉等研究了空間柔性網的牽拉模式對其展開性能的影響,通過將建立的柔性網牽拉展開過程動力學模型與地面試驗對比,驗證了模型的有效性。于洋等選取了多種工況,運用建立的空間柔性網拋射展開力學模型以及柔性網分析有限元模型進行計算仿真分析,得到了影響條網拋射的主要影響因素,具有較大的參考價值。
由于空間柔性網展開面積大、成型快、靈活質輕以及成本低等優點,使得其應用研究也從最初的太空非合作目標捕獲,拓展到消費級無人機“黑飛”捕獲以及警用網槍等應用領域,空間條網的研發也借鑒了上述柔性網的設計理念和研究方法。
當前針對空間柔性網開展的研究工作,分析對象多是繩網結構。在近地面條件下,氣動環境較為復雜,繩網的空間保型性很難達到作戰無人機的攔截要求。同時,作戰無人機不同于小型無人機,其質量和體積更大,作戰半徑更廣,殺傷破壞力更強。僅依靠柔性網的纏繞捕獲很難對作戰無人機形成有效的攔截毀傷。
EFP戰斗部爆轟后能夠形成2 000~3 000 m/s的高速射流,能夠對來襲目標的燃料段和載彈段進行有效打擊,進而完成對目標的攔截任務。但EFP戰斗部的打擊效果受限于炸高范圍,且射向不易調整。
綜合當前空間柔性網研究現狀和EFP戰斗部的相關特性,本文提出一種新型空間條網,用于作戰無人機的近程攔截。文中建立了新型空間條網的動力學模型,并在此基礎上,采用數值仿真和試驗驗證兩種方法進行分析,通過仿真與試驗結果的對比,驗證了空間條網的牽引展開性能。新型空間條網通過柔性攔截網和EFP戰斗部的結合,實現了對作戰無人機更優的攔截效果。
1 空間條網結構及動力學模型
1.1 空間條網結構
如圖1所示,空間條網主要由凱夫拉纖維布條、傘衣(綠)、高能EFP戰斗部(紅)以及中心位置的距離感應器(藍)等組件構成。由于存在發射同步誤差及地面橫風影響,為使條網在空中展開更飽滿、姿態更有利于攔截,網型設計為六角形雙走線拓撲結構。條網主體通過高強高韌的凱夫拉纖維布條和節點傘衣編織而成,同時將31個傘衣按照一定幾何關系徑向設置在條網上,距離感應器放置于條網中心傘衣上,編號為13~30的傘衣分別固定1個EFP戰斗部,編號為1~12的傘衣主要作用為加固外側節點,網體內部傘衣主要作用是固定相應組件以及保持條網和EFP戰斗部在飛行時的姿態穩定性。

圖1 空間條網結構示意圖Fig.1 Schematic diagram of the space net
當前信息化戰爭背景下,作戰無人機在偵察監視、火力壓制和執行攻擊任務方面發揮著重要作用,正逐步成為影響戰爭勝負的關鍵力量。表1給出了3種型號作戰無人機的目標特性和參數指標。
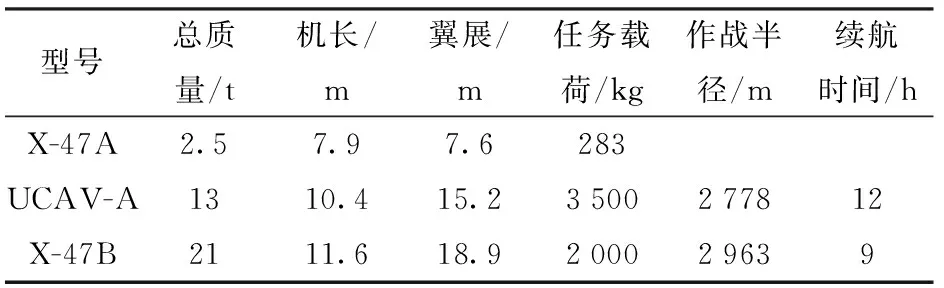
表1 3種型號作戰無人機參數[19]Table 1 Parameters of the three operational UAVs[19]
當作戰無人機來襲時,空間條網發射裝置接收到探測及解算系統傳輸的攔截信號,迅速調整發射俯仰角和外張角,點火發射后,由6枚牽引體將空間條網從儲網裝置中牽引拉出,并在空中迅速展開成型,條網在上升階段網面逐漸變大。根據來襲無人機的目標特性和威脅度,通過控制發射藥量和相關發射參數,使空間條網飛行高度在20~200 m之間的時空窗口下,展開面積達到最大面積的80%以上。通常認為該時空窗口下,上升的“凹”網型姿態較為飽滿,網繩無纏繞。當距離感應器測得距攔截目標100 m內范圍時,控制起爆傘衣處固定的EFP戰斗部,在空中形成多束定向高能射流,協同對作戰無人機進行攔截,進而保障我方高價值經濟目標安全。
基于上述攔截過程,本文主要對空間條網的展開動力學問題進行仿真與試驗對比研究。
1.2 空間條網動力學模型
柔性空間條網相比于剛體系統,是典型的經歷大范圍運動與大變形耦合的柔性多體系統,較難建立精確的數學解析方程,其相對合理的動力學分析模型建立可依據下述離散思想建立。將網繩離散為若干個有限段,然后把各條網條段單元的質量集中在兩側端點,即各繩段節點處。由于網繩非常柔軟,只能承受沿網繩方向的張力,不能承受壓力,故可假設條網繩段節點通過虛擬“彈簧”相連,“彈簧”具有受拉不受壓的受力特性,在考慮條網阻尼效應的基礎上,可把條網條段單元處理為“集中質量阻尼彈簧模型”,如圖2所示。

圖2 空間條網動力學模型示意圖Fig.2 Dynamics model of the space net
在圖2的動力學模型中,將第個條網條段單元等效為質量集中分布于端點的彈簧阻尼元件,其中≤90(共90個條段單元),連接第個和第+1個條網條段單元的為第個節點。假定彈簧阻尼元件中彈簧剛度為、阻尼系數為,則第個條網繩段節點的坐標分量為、、。
條網繩段轉換坐標系如圖3所示。建立第個條網繩段的連體坐標系為,該坐標系的軸、軸、軸分別對應網繩曲線的主法向量、次法向量和切向量。慣性坐標系和連體坐標系可以經過3個歐拉角、、來確定彼此間的轉換關系。慣性坐標系可以順次通過3次旋轉到與連體坐標系一致。先繞過坐標軸轉角,由到;然后繞節線轉過角,從到達的位置;最后繞軸轉過角,從到達。條網繩段連體坐標系和慣性坐標系的轉換矩陣如(1)式所示:

圖3 條網繩段轉換坐標系Fig.3 Transformation of the coordinate system of the space net’s rope segment

(1)
由于網繩柔軟,不可承受法向的彎矩和剪切力,只能承受切向的拉力。故可忽略歐拉角,即=0°,兩坐標系間的變換矩陣簡化如下:

(2)
如果把條網繩段的質量記,則第個條網繩段的質量矩陣在連體坐標系中表示如下:

(3)
式中:n,表示第個繩段的法向質量矩陣;t,表示第個繩段質量的切向分量。
運用工程近似的辦法,將第個條網繩段及第+1條網繩段質量各一半,集中在第個條網繩段,于是第個條網繩段節點處的質量矩陣在慣性坐標系下表示為

(4)
如果將流體作用力n,在連體坐標系下的坐標列陣記作n,,同樣運用工程近似的辦法,將第個條網繩段及第+1個條網繩段的外力n,、n,+1各一半加在第個節點,于是第個條網繩段節點所受流體作用力在慣性坐標系下表示為

(5)
如果把第個條網繩段內的拉力在連體坐標系下的坐標列陣記作,則由牛頓第二定律可知,第個條網繩段節點處的動力學方程為

(6)
式中:為重力加速度矢量。
由(6)式求出網繩單元所有節點處的加速度,進而可獲得整個攔截條網的加速度。
2 空間條網發射展開過程仿真
2.1 仿真建模過程
考慮到空間條網內部網繩只受軸向張力的力學特性,建模時條網網繩采用LINK167單元表征,網繩繩段節點處的傘衣采用SHELL單元表示。同時考慮到仿真主要研究網繩的姿態變化和受力情況,EFP戰斗部不設置起爆,只起配重作用,因此在對牽引體和掛載EFP戰斗部建模時,均設置為剛體,并采用實體單元SOLID164對牽引體和EFP進行建模,不再細化結構。建模過程中,空間條網和傘衣采用Kevlar材料,EFP戰斗部采用鋁合金質材料,牽引體采用鎢合金質材料。相關材料參數設置如表2~表4所示。

表2 空間條網及傘衣材料參數Table 2 Material parameters of the space net and canopy

表3 EFP戰斗部材料參數Table 3 Material parameters of EFP

表4 牽引體材料參數Table 4 Material parameters of the tractor
在接觸約束設置方面,牽引體與網繩的接觸以及EFP戰斗部與傘衣的接觸均屬于剛體PART與柔性體PART的連接,仿真模型中此類連接通過關鍵詞*CONSTRAINED_EXTRA_NODES,將網繩上的部分節點定義為牽引體上的特殊節點,同理將傘衣上的部分節點定義為EFP戰斗部的特殊節點;傘衣與網繩的連接定義為柔性體之間的連接,采用關鍵詞*CONSTRAINED_NODAL_RIGID_BODY將網繩LINK167單元連接點和傘衣SHELL單元上連接點進行綁定,將其設置為節點剛體。最終建立的有限元模型如圖4所示。

圖4 條網展開狀態有限元模型Fig.4 Finite element model of the unfolded space net
上述網型狀態與空間條網發射前位于儲網箱內的收納狀態差異較大,因此將空間條網發射展開的仿真過程分兩步實現。
首先,設置6枚牽引體速度對條網進行網型姿態控制,通過速度控制將條網完全展開狀態牽引收攏為儲網裝置中的收納狀態,將該近似狀態下的模型認定為第二步仿真的初始狀態。其次,提取單元和節點信息,對初始展開狀態下的K文件修改,隨后進行第二過程仿真,其中第二仿真過程設置完成后的有限元模型,如圖5所示。為了與試驗進行有效對比,仿真參數的設定保持與試驗工況一致,采取垂直地面的0°發射角,發射初速設為80 m/s,為完整表征空間條網牽引展開過程,經過前期測試,將仿真時長設置為6 s。

圖5 條網收納狀態有限元模型Fig.5 Finite element model of the folded space net
2.2 仿真結果
由于涉及大變形問題,模型求解時間較長,最終仿真過程中的空間條網姿態變化如圖6所示。

圖6 條網仿真繩段張力圖Fig.6 Tension diagram of the simulated space net
由圖6可見,空間條網在發射初期網繩存在相互擠壓現象,條段單元也反復在拉緊和松弛兩種狀態間不斷轉化。但由于網繩單元對張力的非線性響應,整個空間條網發射展開及回落過程中姿態較為平穩,未出現劇烈振動現象。分析條網張力云圖可知,當條網展開面積達到最大張開面積的86%,整體環向網繩的張力值逐漸大于徑向網繩,條網整體張力值在發射瞬時和條網張開至最大狀態時較大。在圖示6個時刻下,張力峰值出現在0.06 s時牽引繩位置處,約為4.761×10N。在牽引展開過程中,傘衣之間的網繩段出現波浪式振蕩,而傘衣節點處的穩定性明顯優于節點間網繩,為EFP戰斗部穩形發射提供了一定的姿態支撐。
3 空間條網地面發射展開試驗
3.1 試驗目的
空間條網是典型的非線性、大變形多柔性體耦合結構,在實際工程實踐中具有廣闊應用空間。由于其在低空氣動環境中的復雜性,僅通過數值分析結果對其空中展開性能進行分析,具備一定參考價值,但可靠性欠佳。因此,需要開展空間條網地面發射展開試驗對條網仿真模型和分析結果進行對比驗證,進一步厘清其牽引展開特性。
3.2 試驗設備及場地布置
試驗場地設置俯視定位如圖7所示,使用高空無人機拍攝畫面來說明場地設置,圖中標記了條網發射點位、兩臺高速立體相機架設位以及4個靶標定位點。試驗開始前,首先對立體相機進行定位,并調整其視場范圍及其內方位和外方位元素,標定結束后進行相關試驗測量記錄。

圖7 試驗場地設置俯視定位圖Fig.7 Overhead positioning diagram of the test site
試驗發射藥采用15 g雙醋(雙基發射藥),通過電信號控制發射藥起爆,將空間條網折疊安裝于與地面垂直固定的儲網箱中。點火過程中,發射藥內能不斷轉化為牽引體動能,采用6枚鎢鋼質牽引體牽引空間條網飛行。為直觀表達測量結果,對條網進行測點編號,具體如圖8所示。

圖8 空間條網實物測點編號Fig.8 Measurement point numbering map for the space net
點火發射后,在牽引體的牽拉作用下,空間條網從地面儲網箱內逐漸被牽拉展開,在空中迅速成型,當網繩張緊時,牽引體在網繩拉力下回縮,網面出現松弛,整體展開面積減小,隨后在上升一小段距離后,網繩失去上升動力,在重力作用下開始下落。試驗全過程共經歷兩個階段:空間條網在0~2.77 s為發射上升階段,2.77~5.81 s為自由下落階段。圖9為試驗全過程中選取特征時刻下空間條網的瞬時空中姿態變化圖。觀察試驗過程發現,條網因受空氣阻力及橫風影響,飛行軌跡并未完全按豎直方向上升和回落,在既定軌跡發生了一定程度偏移。

圖9 空間條網空中姿態變化時程圖Fig.9 Airborne attitude of the space net versus time
3.3 試驗結果
在試驗記錄中,觀測設備記錄了空間條網從發射、展開、回縮到落地的全過程。分別對18個EFP戰斗部(標記點編號13~30)做跟蹤定位測量,得到每個戰斗部的三維坐標(,,)。
除此之外,對上述標記點編號為13、15、17、19、21、23的EFP戰斗部外輪廓進行空間分析,并投影到條網網面沿半徑方向的環向投影面,得到Δ及Δ/×100%的值(=16.24 m),此處為標記點編號13、15、17、19、21、23圍成的邊長為2.5 m條網內部六邊形的有效攔截面積。為更好地展現條網狀態,選取該過程8個條網瞬時展開狀態研究。對各狀態下包絡六邊形輪廓進行空間分析,得到通過空間條網在8個時刻下瞬時條網展開面積變化曲線圖,如圖10所示。

圖10 條網面積展開率曲線擬合Fig.10 Curve fitting of the unfolding rate of the space net
在8個瞬時狀態中,選取臨近展開最高點位置的某瞬時狀態展示,如圖11所示。

圖11 條網空中瞬時姿態Fig.11 Airborne transient attitude of the space net
表5分別記錄了13~30號節點(圖1中標記)的瞬時狀態下坐標位置,其中坐標原點為條網發射點,軸坐標值即為目標高度值,軸、軸坐標為相對值。通過坐標點圍成多邊形的投影面積表征其有效攔截面積。由表5可知,該瞬時時刻有效面積為14.75 m,則展開率為90.83%。

表5 條網某瞬時姿態測量結果Table 5 Transient attitudes of the space net
4 仿真與試驗對比分析
選取試驗過程中典型時刻的網型姿態,與 2.2節中的仿真結果進行比較,試驗與仿真的條網位形對比如圖12所示。
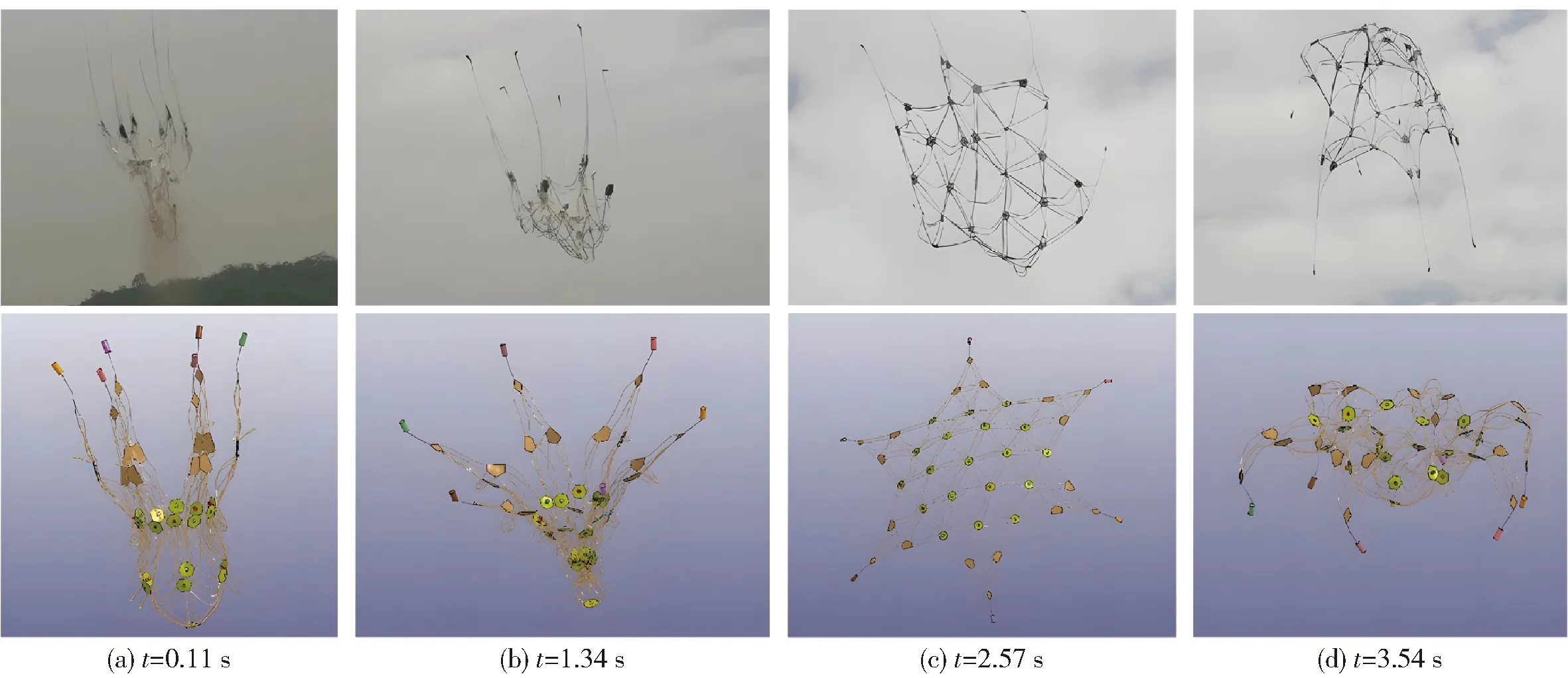
圖12 特征時刻下條網試驗(上)與仿真(下)位形對比Fig.12 Comparison of the experimental(up) and simulated(down) bit shape of the space net at certain time points
在上升初始階段,網繩相互擠壓現象明顯,且初期空間條網姿態變化快,當條網達到最大展開面積時,牽引體受到條網網繩約束,網繩迅速張緊,條網主體結構回縮,網面展開面積迅速減小。繼續上升一小段距離后,條網整體失去上升動力,將迅速回落,有效展開面積也會迅速減小。經過試驗和仿真對比后發現,實際試驗過程達到的最大有效展開面積要小于仿真值,且試驗中網型保持時間也比仿真值要短,考慮主要是受到試驗和仿真中空氣阻力不一致的影響。
圖13為條網飛行高度隨時間變化曲線。由圖13可以看出:空間條網豎向位移的仿真和試驗最大值均在20 m左右,仿真值要稍大于試驗值;約在2.56 s時,條網的仿真豎向位移值先于試驗值達到最大,觀察試驗值可以發現,在實際的發射試驗中,條網在最大位移附近位移變化較緩,存在約1.5 s的平臺段,側面證明該試驗工況下條網具有較好的滯空保形時空窗口。
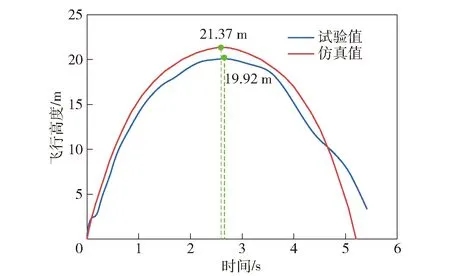
圖13 條網飛行高度變化Fig.13 Height variation of the space net
在空間條網上選取、、、、5個特征點作為條網網繩內力的測試分析點。其中,點為外側邊繩點,為條網內部徑向繩點,點、點為條網內部環向繩點,點為條網中心特征點,點位示意圖如圖14所示。
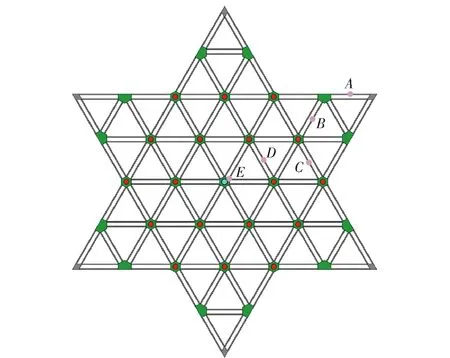
圖14 網繩內力的測試點分布Fig.14 Distribution of measuring points for the internal force of the space net
空間條網結構內部網繩段數目眾多,且由于其受力的特殊性,較難通過理論求得其不同工況、不同參數下的解析解,而且在試驗過程中,也很難通過高速攝影、傳感器等測量設備對網繩內部張力進行測量。經過對比后可知,最優分析方法就是通過數值模擬進行研究,其中、、、、5個特征點內力的數值模擬結果如圖15所示。
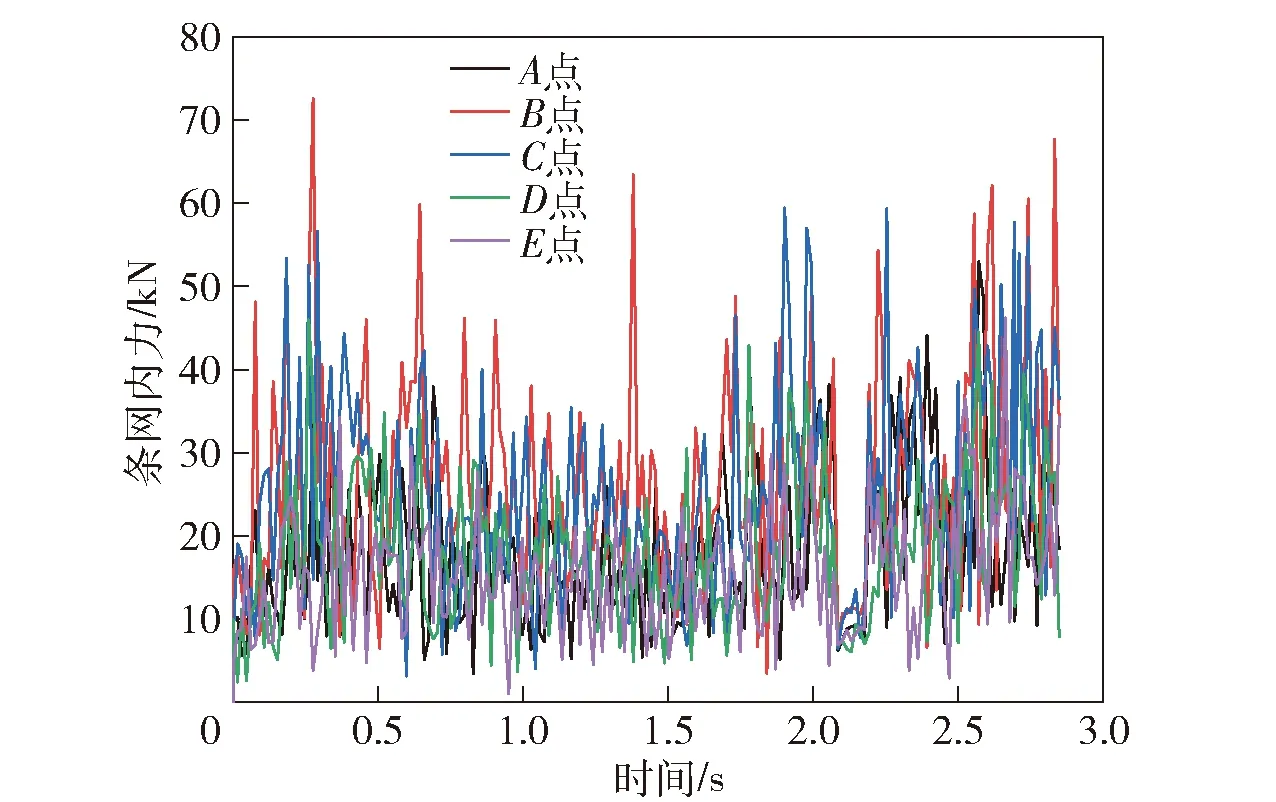
圖15 條網特征點處網繩內力仿真值Fig.15 Simulated internal force values at characteristic points of the space net
條網網繩采用凱夫拉纖維柔性材料編織而成,由于其“受拉不受壓”的力學特性,網繩表現出不連續軸力變化。分析空間條網特征點的受力可以發現,條網的內力和變形以波的形式沿繩網傳遞,由于條網材料的受力延遲效應,不同位置處的應力變化具有先后時間差,網繩的內力變化表現出不規律的振蕩變化。觀察圖14中5個特征點的內力可以發現,各特征點內力值在23 s左右存在驟減,結合圖6(e)可知,該時刻下條網張開至最大面積突然回縮。與其他特征點相對,位于條網內部徑向位置點的內力,在變化中的最大值高于其他4點。同時可以發現,點作為條網中心點附近的特征點,該點處的網繩內力明顯小于其余4點,可見傘衣單元的設計提升了網繩的穩定性,能夠為EFP戰斗部起爆攔截無人機提供較優的姿態支撐。除此之外,各點內力也在不斷“增大- 減小- 增大- 減小”地周期變化。
觀察圖16可以發現,在條網發射展開過程中,、、、、5個特征點的速度值整體變化趨勢都是逐漸減小的。其中,與條網內部特征點、、相比,靠近牽引體特征點處和底部特征點處的速度值振蕩范圍較大。
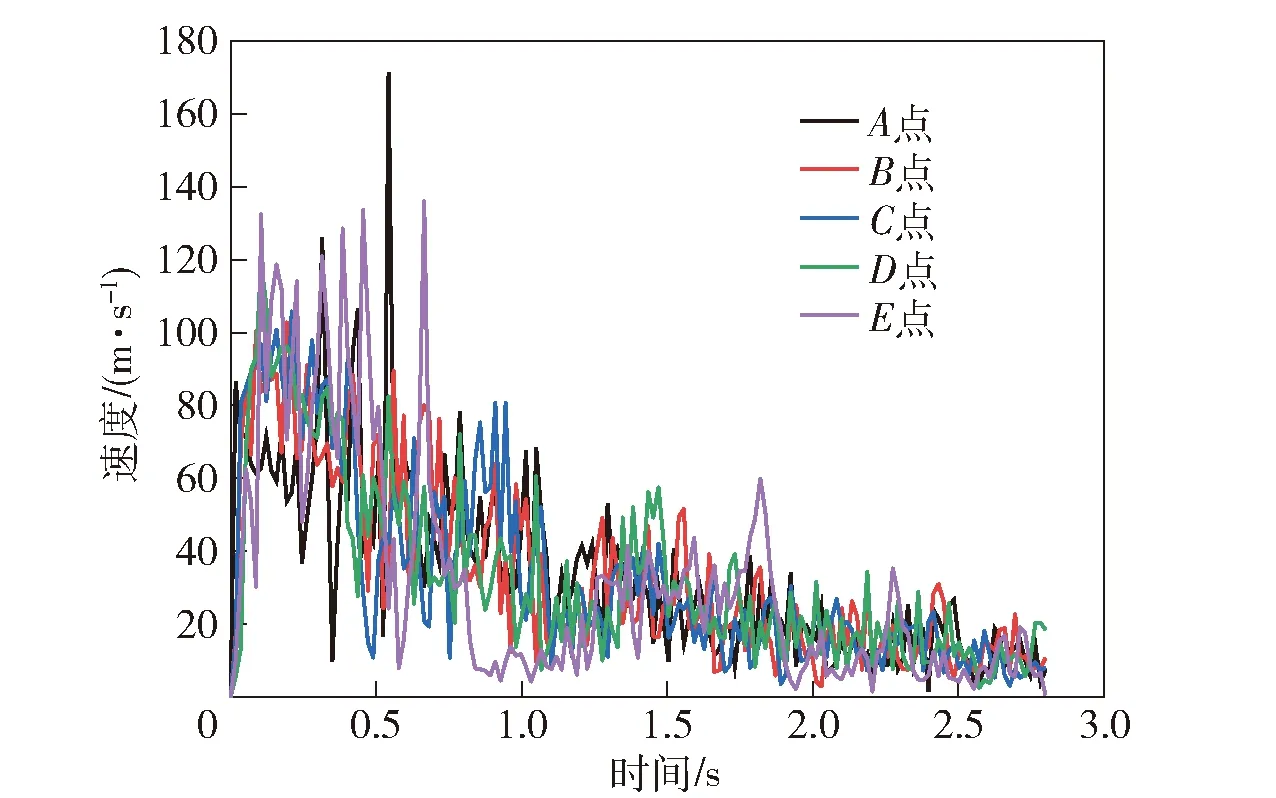
圖16 條網特征點處網繩速度仿真值Fig.16 Simulated velocity values at characteristic points of the space net
5 結論
本文在無人機攔截的背景需求下,提出了一種區別于現有繩網拓撲結構的空間條網近程攔截方法。在建立的動力學模型基礎上,通過仿真與地面試驗對比,對空間條網牽引展開過程中的網型姿態、有效展開面積及相關受力等做出分析。得出以下主要結論:
1)空間條網作為柔性非線性大變形的分析對象,理論計算難以求得其在工程背景應用下的解析解,數值模擬和地面驗證試驗的相互對比提供了較好的分析思路,也驗證了該種作戰無人機攔截方法的可行性和合理性。
2)仿真結果反映了空間條網牽引飛行過程中的姿態變化及位形變化,開展的地面試驗與仿真結果具有較高的一致性,條網在空中有效展開面積都能夠達到最大面積的80%以上,且最大飛行高度差為1.45 m,體現了條網較好的空中展開成型及飛行能力。
3)經過分析網繩的內力發現,徑向網繩段受力要大于環向網繩段,且空間條網的傘衣設計提升了內部網繩單元的穩定性,同時各網繩段的內力也在隨著條網的牽引展開過程呈現出“增大- 減小- 增大- 減小”的周期變化。