半主動葉片式阻尼器的建模與實(shí)驗(yàn)研究
2022-10-11 09:25:48郭鑫星曹曉彥王運(yùn)志
工程力學(xué) 2022年10期
關(guān)鍵詞:模型
郭鑫星,周 瑾,曹曉彥,王運(yùn)志
(南京航空航天大學(xué)機(jī)電學(xué)院,江蘇,南京 210016)
近年來,流體阻尼器憑借其良好的能量耗散性和可靠性被廣泛應(yīng)用于航空、船舶和工業(yè)生產(chǎn)等領(lǐng)域[1-3],其理論技術(shù)和制造技術(shù)得到了飛速的發(fā)展,阻尼連續(xù)可調(diào)的流體阻尼器(CDC)更是得到了專家們的青睞。半主動葉片式阻尼器是CDC 的一種,屬于半旋轉(zhuǎn)類流體阻尼器,具有體積小、布置方便和耗能效率高等優(yōu)點(diǎn)。由于半主動葉片式阻尼器的流場與剪切稀變率較高的液壓油會產(chǎn)生交變壓力,使得混合在液體中的氣體不斷分離和溶解,從而導(dǎo)致阻尼器的力學(xué)性能具有很大的剛度和非線性。這些因素給阻尼器的力學(xué)建模帶來了一定的困難。
為了提高CDC 的應(yīng)用效率,并為設(shè)計(jì)合理有效的控制策略提供可靠的支持,需要建立合適的力學(xué)模型來描述CDC 的力學(xué)特性[4-5]。因此,專家們針對CDC 的建模展開了深入的研究。CDC 的模型[6-8]通常分為三類:準(zhǔn)靜態(tài)模型、參數(shù)模型和非參數(shù)模型,最傳統(tǒng)的模型是通過流量公式來計(jì)算阻尼器出力的準(zhǔn)靜態(tài)模型[9],這種模型精度較差,只適用于阻尼器的設(shè)計(jì)階段,其參數(shù)較多,設(shè)計(jì)的參數(shù)值與實(shí)際的數(shù)值存在較大的誤差,并不能很好地模擬阻尼器的出力特性;也有一些學(xué)者,如北京科技大學(xué)的王文瑞等[10]基于流體力學(xué)公式建立了葉片式阻尼器的力學(xué)模型,并通過參數(shù)辨識的方法來得到各個參數(shù)的值,從而改善了此類模型的精度。常見的參數(shù)模型有Kelvin 模型和Maxwell 模型,前者由一個彈簧元件和阻尼元件并聯(lián)而成,后者則由一個彈簧元件和阻尼元件串聯(lián)組成,這兩種模型均有兩個參數(shù),即剛度系數(shù)和阻尼系數(shù),模型結(jié)構(gòu)較為單一,能夠簡單地描述阻尼力的變化趨勢,但難以準(zhǔn)確地跟蹤阻尼力的變化[11]。為此,專家們又對這兩種模型進(jìn)行了改進(jìn),提出了廣義Kelvin 模型和廣義Maxwell 模型,這兩種模型在原模型的基礎(chǔ)上增加了兩個指數(shù)參數(shù),以更好地模擬阻尼器出力的非線性,提高了模型精度。以上四種模型是比較經(jīng)典的參數(shù)模型,有不少專家以這些模型為基礎(chǔ),提出在公式中加入一個滯回算子來模擬阻尼器的滯回特性。SPENCER 等[12]采用Bouc-wen 滯后算子來表達(dá)磁流變阻尼器的滯后行為,結(jié)果表明:Bouc-wen模型具有較高的精度,但該模型較為復(fù)雜,其參數(shù)識別過程也較為困難;為尋找一種計(jì)算較為簡單且精度較高的模型,KWORK 等[13]提出了雙曲正切模型,通過雙曲正切函數(shù)來描述阻尼器的遲滯特性,該模型參數(shù)較少,計(jì)算方便,參數(shù)識別過程相比Bouc-wen 模型較為簡單;KRAUZE 等[14]也通過雙曲正切模型建立了磁流變阻尼器的力學(xué)模型,并將其與Bouc-wen 模型進(jìn)行了比較,指出了雙曲正切模型的優(yōu)越性;CHENG 等[15]還利用考慮激勵的雙曲正切模型對阻尼器進(jìn)行了力學(xué)建模,進(jìn)一步提高了雙曲正切模型的精度。除此之外,還有學(xué)者使用非參數(shù)化建模的方式建立CDC的力學(xué)模型。SCHURTER 和ROSCHKE[16]應(yīng)用ANFIS 理論建立了阻尼器的模型;DU 等[17]采用一個四輸入一輸出的徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)來模擬磁流變阻尼器的正向和反向的動態(tài)特性;NGUYEN和CHOI[18]通過建立神經(jīng)模糊系統(tǒng)來追蹤智能阻尼器的動態(tài)特性。
為精準(zhǔn)追蹤半主動葉片式阻尼器的力學(xué)特性,本文提出一種改進(jìn)的雙曲正切模型,模型包含一個彈簧元件、一個阻尼元件和一個滯回算子。通過改進(jìn)的自適應(yīng)遺傳算法辨識得到模型的參數(shù),并將該模型與其它現(xiàn)有的兩種模型進(jìn)行仿真對比,以驗(yàn)證該模型的準(zhǔn)確性。最后,將模型參數(shù)與電機(jī)位置值通過多項(xiàng)式進(jìn)行擬合以驗(yàn)證模型在其他工況下的追蹤性能。
1 試驗(yàn)裝置和特性分析
1.1 半主動葉片式阻尼器
直升機(jī)振動環(huán)境較為復(fù)雜,主要分為旋翼系統(tǒng)、傳動系統(tǒng)和發(fā)動機(jī)等產(chǎn)生的不平衡振動,以及直升機(jī)高速飛行時外表面氣動載荷引起的強(qiáng)迫振動;這類振動中,傳遞到操縱系統(tǒng)的振動嚴(yán)重影響了飛行員的駕駛安全及身心健康,其中,1 Hz~12 Hz 的低頻振動影響尤為顯著[19]。為了降低某直升機(jī)操縱系統(tǒng)的振動,其一階共振頻率約為3 Hz,本文提出了一種新型半主動葉片式阻尼器,其最大力矩約為20 N·m,圖1 為阻尼器的實(shí)物圖及結(jié)構(gòu)原理圖。它的工作原理如圖1(c)所示,當(dāng)阻尼器受到振動激勵時,連接臂帶動轉(zhuǎn)子葉片旋轉(zhuǎn),腔室中的油液受到擠壓和拉伸后形成高壓腔和低壓腔,當(dāng)油液由于壓力從高壓腔通過阻尼間隙流向低壓腔時,由于阻尼間隙的節(jié)流作用,產(chǎn)生阻尼力矩。伺服電機(jī)的輸出軸通過聯(lián)軸器與調(diào)整螺釘相連,調(diào)節(jié)電機(jī)的位置可以對阻尼間隙進(jìn)行調(diào)節(jié),從而控制阻尼力矩。
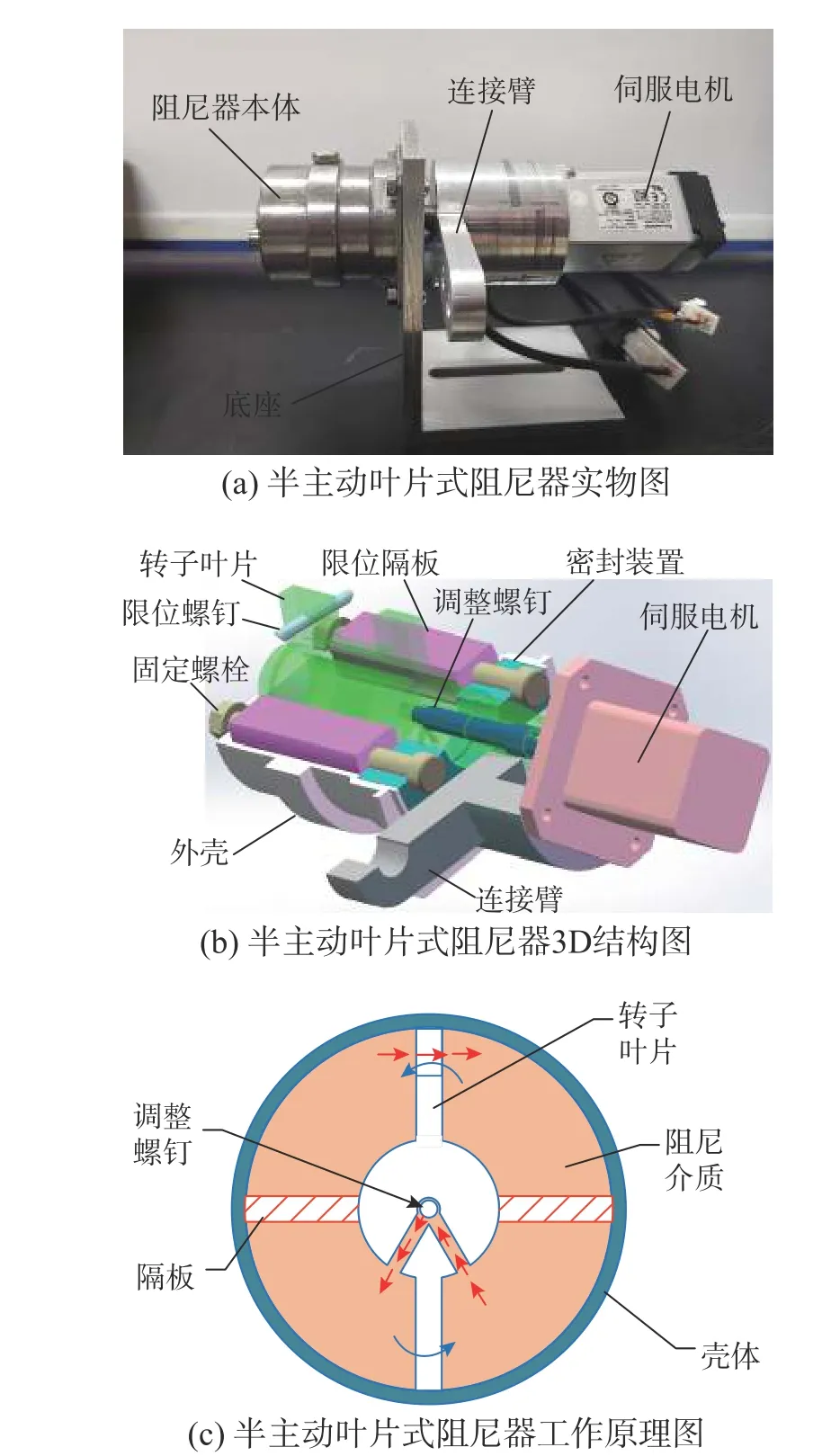
圖1 半主動葉片式阻尼器結(jié)構(gòu)原理圖Fig. 1 Structural schematic diagram of semi active blade damper
1.2 動態(tài)性能測試
為了研究半主動葉片式阻尼器的力學(xué)特性,利用MTS 試驗(yàn)機(jī)對阻尼器進(jìn)行動態(tài)性能測試,試驗(yàn)裝置如圖2 所示。MTS 疲勞試驗(yàn)機(jī)是由美國制造,其最大出力為5.5 kN,它配有力傳感器和位移傳感器,用于力和位移信號的采集,如圖2(a)所示。在試驗(yàn)裝置中,為了將MTS 試驗(yàn)機(jī)的直線運(yùn)動轉(zhuǎn)化為阻尼器的旋轉(zhuǎn)運(yùn)動,需要在兩者之間安裝一個曲柄滑塊機(jī)構(gòu),以方便對阻尼器進(jìn)行力學(xué)特性測試。在測試前,需要將阻尼器的連接臂放置到水平位置,以避免阻尼器超過其最大行程[20],在曲柄滑塊機(jī)構(gòu)的連接處適當(dāng)?shù)靥砑訚櫥鸵宰畲蟪潭葴p小摩擦力對試驗(yàn)的影響。試驗(yàn)裝置的工作原理如圖2(b)所示,圖2(b)中: α 和 θ分別為AB連桿、OA連接臂與水平線之間的夾角,當(dāng)OA連接臂處于水平狀態(tài)時,即θ=0 時,O、B兩點(diǎn)間的垂直距離為h,定義此時滑塊的位置為其運(yùn)動原點(diǎn)。當(dāng)滑塊的運(yùn)動距離為x時,曲柄滑塊機(jī)構(gòu)的運(yùn)動方程如下:
式中:LOA為OA連接臂的長度;LAB為AB連桿的長度;A、f分別為激勵信號的幅值和頻率。
此時,阻尼器的力矩T的計(jì)算公式為:

式中,F(xiàn)exp為力傳感器測得的阻尼力。
示功試驗(yàn)采用不同幅值和頻率的正弦信號作為激勵信號,幅值選用1.0 mm、1.5 mm、2.0 mm、2.5 mm,頻率選用1 Hz、2 Hz、3 Hz、4 Hz、6 Hz。試驗(yàn)前,先將調(diào)整螺釘調(diào)節(jié)至節(jié)流通道口剛好全開的位置,然后將電機(jī)與調(diào)整螺釘通過聯(lián)軸器固接,設(shè)定此時電機(jī)位置 φ=0°。當(dāng)電機(jī)帶動調(diào)整螺釘旋轉(zhuǎn)至節(jié)流通道口正好完全關(guān)閉時,此時電機(jī)位置φ=360°。試驗(yàn)時,電機(jī)位置φ 取0°、90°、180°、225°、270°、315°、360°。試驗(yàn)結(jié)束后,將滑塊的位移x通過式(1)轉(zhuǎn)換為半主動葉片式阻尼器的角位移,再通過數(shù)值計(jì)算得到對應(yīng)的角速度,將傳感器測得的阻尼力Fexp通過式(2)轉(zhuǎn)換為半主動葉片式阻尼器的力矩,以便于試驗(yàn)結(jié)果的分析。
1.3 試驗(yàn)結(jié)果與分析
當(dāng)激勵信號是幅值為2.0 mm、頻率為4 Hz 的正弦信號時,將不同電機(jī)位置 φ下的試驗(yàn)數(shù)據(jù)繪制成角位移-力矩、角速度-力矩圖,結(jié)果如圖3 所示。從圖3 中可以看出隨著電機(jī)位置 φ的增大,半主動葉片式阻尼器產(chǎn)生的最大力矩逐漸增大,這是由于電機(jī)位置 φ增大,調(diào)整螺釘向底端靠近,導(dǎo)致阻尼間隙變小,阻尼器產(chǎn)生的力矩增大。觀察曲線的最高點(diǎn)可以得出,當(dāng)電機(jī)位置 φ=0°時,最大力矩約為1.2 N·m;當(dāng)電機(jī)位置 φ=360°時,最大力矩約為3.4 N·m,由此可知該阻尼器的可調(diào)系數(shù)為3 倍左右。圖3 中,角位移和力矩包圍區(qū)域的面積也隨著電機(jī)位置 φ的增大而增大,表明阻尼器運(yùn)動一周期消耗的功隨著電機(jī)位置 φ的增大而增大[21]。除此之外,觀察角位移-力矩曲線的斜率可知,半主動葉片式阻尼器存在一定的剛度,并且剛度隨著電機(jī)位置 φ的增大而增大,這是由于油液受擠壓的過程也會產(chǎn)生一個彈性力[22],并且隨著阻尼間隙的減小和油壓的增大,這個彈性力會逐漸增大。
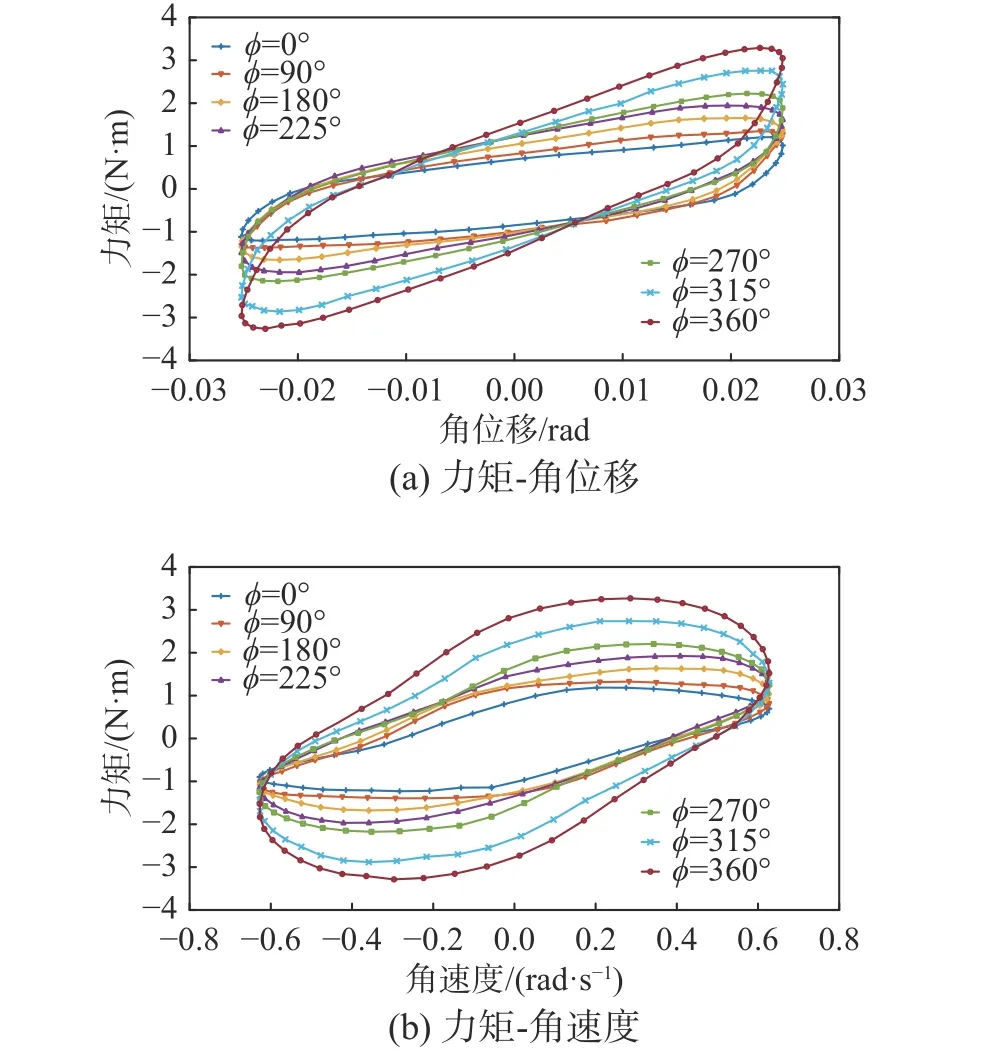
圖3 不同電機(jī)位置下半主動葉片式阻尼器的滯回曲線Fig. 3 Hysteretic curves of semi-active blade damper under different motor positions
當(dāng)激勵頻率為4 Hz,電機(jī)位置 φ=360°時,半主動葉片式阻尼器在不同激勵幅值(1.0 mm、1.5 mm、2.0 mm、2.5 mm)下的動態(tài)響應(yīng)曲線如圖4 所示,從圖4 中可以看出,隨著激勵幅值的增大,阻尼器產(chǎn)生的最大力矩和運(yùn)動一周期所消耗的功均在逐漸增大,而阻尼器的剛度變化較小。當(dāng)激勵幅值為2.0 mm,電機(jī)位置 φ=360°時,阻尼器在不同激勵頻率(1 Hz、2 Hz、3 Hz、4 Hz、6 Hz)下的動態(tài)響應(yīng)曲線如圖5 所示,從圖5 中可以看出,阻尼器所產(chǎn)生的最大力矩和運(yùn)動一周期所消耗的功隨著頻率的增大而增大,這是由于隨著激勵頻率的增大,阻尼器的角速度會增大,從而導(dǎo)致阻尼器產(chǎn)生的力矩增大[23-24]。
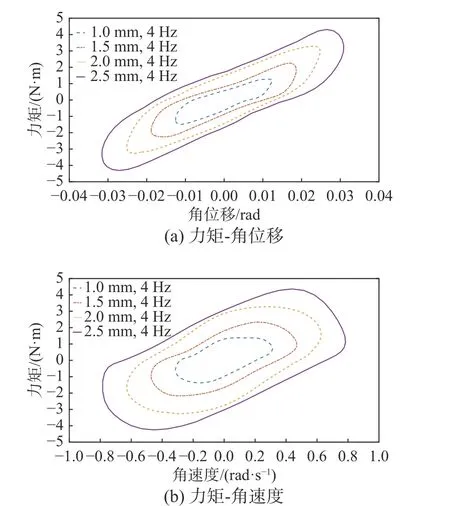
圖4 不同激勵幅值下半主動葉片式阻尼器的滯回曲線Fig. 4 Hysteretic curves of semi-active blade damper under different excitation amplitudes
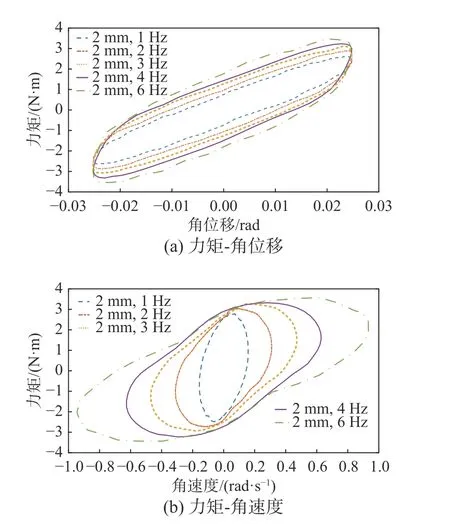
圖5 不同激勵頻率下半主動葉片式阻尼器的滯回曲線Fig. 5 Hysteretic curves of semi-active blade damper under different excitation frequencies
總的來說,半主動葉片式阻尼器的出力特性具有較強(qiáng)的非線性和滯回性,并且存在一定的剛度,這給阻尼器的建模帶來了一定的困難,選用合適的力學(xué)模型來描述這種特性是目前亟需解決的問題。
2 力學(xué)模型和參數(shù)辨識
2.1 廣義Maxwell 模型
Maxwell 模型是經(jīng)典的參數(shù)模型,它由一個線性彈簧元件和一個線性阻尼元件串聯(lián)而成,如圖6(a)所示,該模型結(jié)構(gòu)簡單,易于辨識,通常用于描述阻尼器單個頻率下的力學(xué)特性。在動力學(xué)方面,兩個元件的運(yùn)動滿足以下方程:式中:K為彈簧元件的剛度系數(shù);C為阻尼元件的阻尼系數(shù);F為阻尼器產(chǎn)生的力。
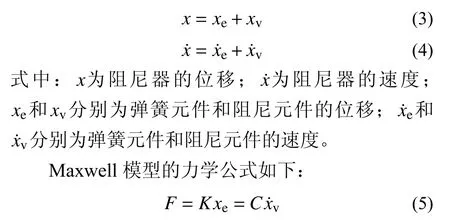
為了解決Maxwell 模型只能在單個頻率下保持精度的問題,學(xué)者們提出了廣義Maxwell 模型,它是一種機(jī)械流變模型。結(jié)構(gòu)上,它在Maxwell模型的基礎(chǔ)上,將線性彈簧元件和線性阻尼元件分別換為非線性彈簧元件和非線性阻尼元件[25],如圖6(b)所示。廣義Maxwell 模型的力學(xué)公式如下:
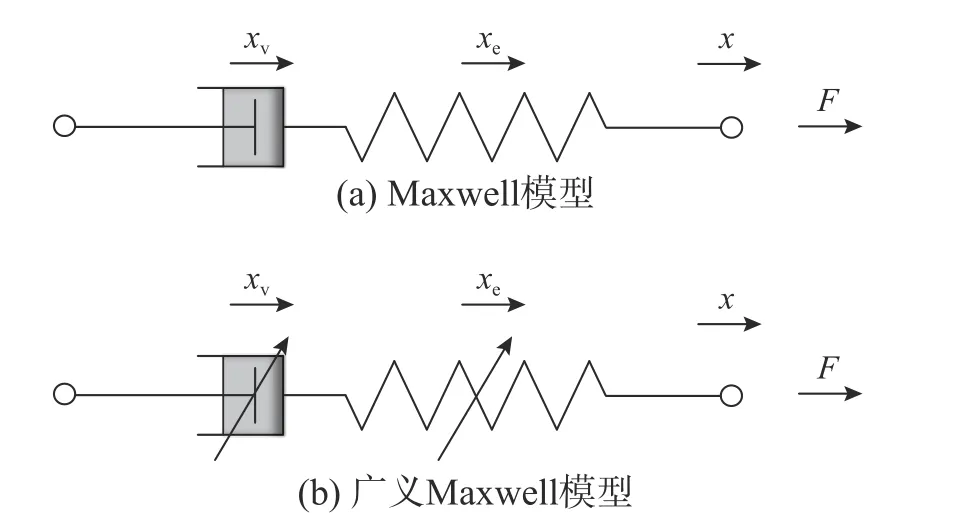
圖6 流體阻尼器的力學(xué)模型Fig. 6 Mechanical models of fluid dampers

式中: β為彈簧元件位移的指數(shù)系數(shù); α為阻尼元件速度的指數(shù)系數(shù)。
對于旋轉(zhuǎn)類阻尼器,廣義Maxwell 模型的力矩公式可表達(dá)為:

式中:T為阻尼器產(chǎn)生的力矩; θe和 θ˙v分別為彈簧元件的角位移和阻尼元件的角速度,彈簧元件和阻尼元件的運(yùn)動關(guān)系滿足式(8)和式(9):
Bouc-wen 模型是一種通過微分方程來描述遲滯、非線性現(xiàn)象的參數(shù)模型,它的數(shù)學(xué)表達(dá)式簡潔直觀,參數(shù)較少,適用于描述工程問題中出現(xiàn)的遲滯、非線性現(xiàn)象[26-27]。在磁流變領(lǐng)域,這種模型已被廣泛地應(yīng)用于磁流變阻尼器的力學(xué)建模,并且大量文獻(xiàn)已證明該模型良好的精度。考慮到半主動葉片式阻尼器中存在一定的剛度,Boucwen 模型中保留一個彈簧元件,其力矩公式如下:

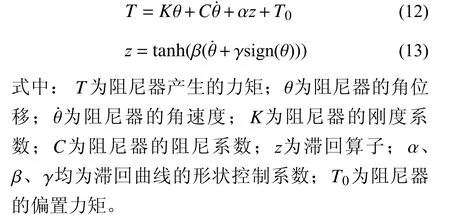
2.2 Bouc-wen 模型
式中:T為阻尼器產(chǎn)生的力矩; θ為阻尼器的角位移; θ˙ 為阻尼器的角速度;K為阻尼器的剛度系數(shù);C為阻尼器的阻尼系數(shù);z為滯回算子; α、β 、 γ、A、n均為滯回曲線的形狀控制系數(shù),為計(jì)算簡便,n通常情況下取2[28];T0通常用于描述阻尼器存在的偏置力矩。因此,Bouc-wen 模型總共有7 個 參 數(shù)(K、C、 α 、 β 、 γ、A、T0)需 要 辨識,由于模型中含有復(fù)雜的微分方程,這使得辨識過程變得相對困難,計(jì)算量也相對較大,不利于振動的半主動控制。
2.3 改進(jìn)的雙曲正切模型
為了尋找一個計(jì)算量較小,易于辨識的模型,有學(xué)者提出了一種用雙曲正切函數(shù)來描述滯回特性的雙曲正切模型,它和Bouc-wen 模型相似,用一個彈簧元件和一個阻尼元件來描述半主動葉片式阻尼器的剛度和阻尼,用一個滯回單元來描述阻尼器的滯回特性[23],該模型結(jié)構(gòu)如圖7 所示。
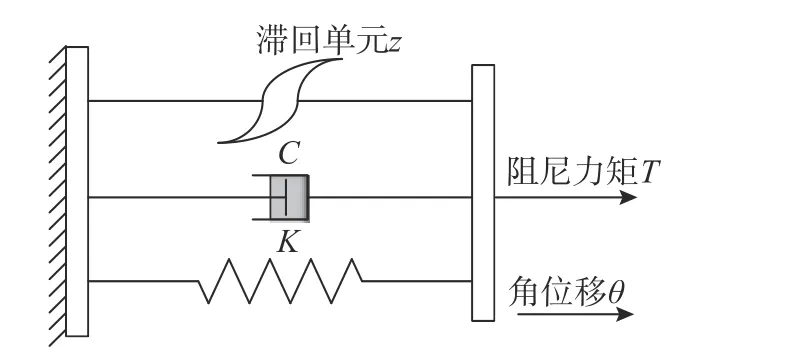
圖7 雙曲正切模型Fig. 7 Hyperbolic tangent model
根據(jù)旋轉(zhuǎn)類阻尼器的運(yùn)動特性,雙曲正切模型的力矩公式如下:
標(biāo)準(zhǔn)的雙曲正切模型中,彈簧元件和阻尼元件均為線性元件,在追蹤半主動葉片式阻尼器強(qiáng)非線性的力學(xué)特性時仍然存在不同頻率下不能保持精度的缺陷,為彌補(bǔ)這一不足,進(jìn)一步改善模型的追蹤性能,本文將原模型中線性的彈簧元件和阻尼元件換為非線性的彈簧元件和阻尼元件,在兩個元件中引入分?jǐn)?shù)階,以更好地追蹤半主動葉片式阻尼器的力學(xué)特性,模型結(jié)構(gòu)如圖8 所示。
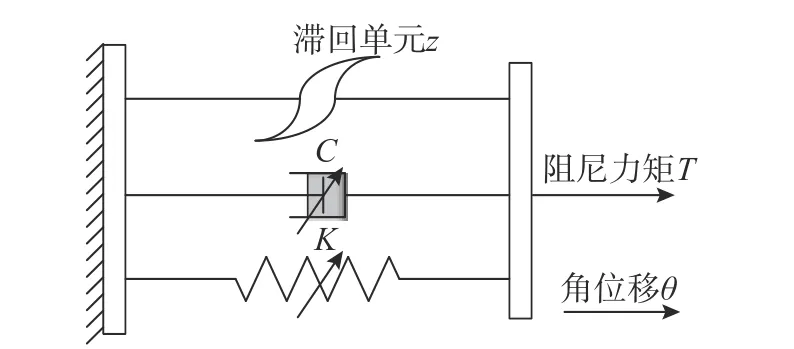
圖8 改進(jìn)的雙曲正切模型Fig. 8 Improved hyperbolic tangent model
改進(jìn)后的雙曲正切模型力矩公式如下:

式中,a1和a2分別為角位移的指數(shù)系數(shù)和角速度的指數(shù)系數(shù),其余參數(shù)與雙曲正切模型參數(shù)意義一致。需要辨識的參數(shù)共有8 個,分別為K、C、a1、a2、 α 、 β 、 γ和T。雖然模型中增加了兩個參數(shù),但模型總體計(jì)算量增加不大,依舊避免了復(fù)雜的微分方程。
確定半主動葉片式阻尼器的力學(xué)模型后,需要對模型進(jìn)行參數(shù)辨識,比較常用的尋優(yōu)算法有最小二乘優(yōu)化算法、粒子群優(yōu)化算法、差分進(jìn)化算法和遺傳算法等。本文使用改進(jìn)的自適應(yīng)遺傳算法對上文幾種模型進(jìn)行參數(shù)辨識,編碼方式采用實(shí)數(shù)編碼。改進(jìn)的自適應(yīng)遺傳算法的主要步驟為:選用合適的目標(biāo)函數(shù)和設(shè)定各個參數(shù)的上下限,根據(jù)參數(shù)的上下限隨機(jī)生成一個初始種群;計(jì)算種群中每個個體的適應(yīng)度值,判斷適應(yīng)度值是否達(dá)到要求,若達(dá)到要求,則停止計(jì)算,否則對種群進(jìn)行遺傳操作(選擇、交叉、變異)生成新的種群;然后重新計(jì)算新種群的適應(yīng)度值,重復(fù)以上步驟,直至達(dá)到要求的適應(yīng)度值或最大迭代次數(shù)[29]。
為尋找能準(zhǔn)確追蹤半主動葉片式阻尼器力學(xué)特性的模型參數(shù),本文選用試驗(yàn)值與仿真值之間的誤差的均方值為目標(biāo)函數(shù),具體計(jì)算公式如下:
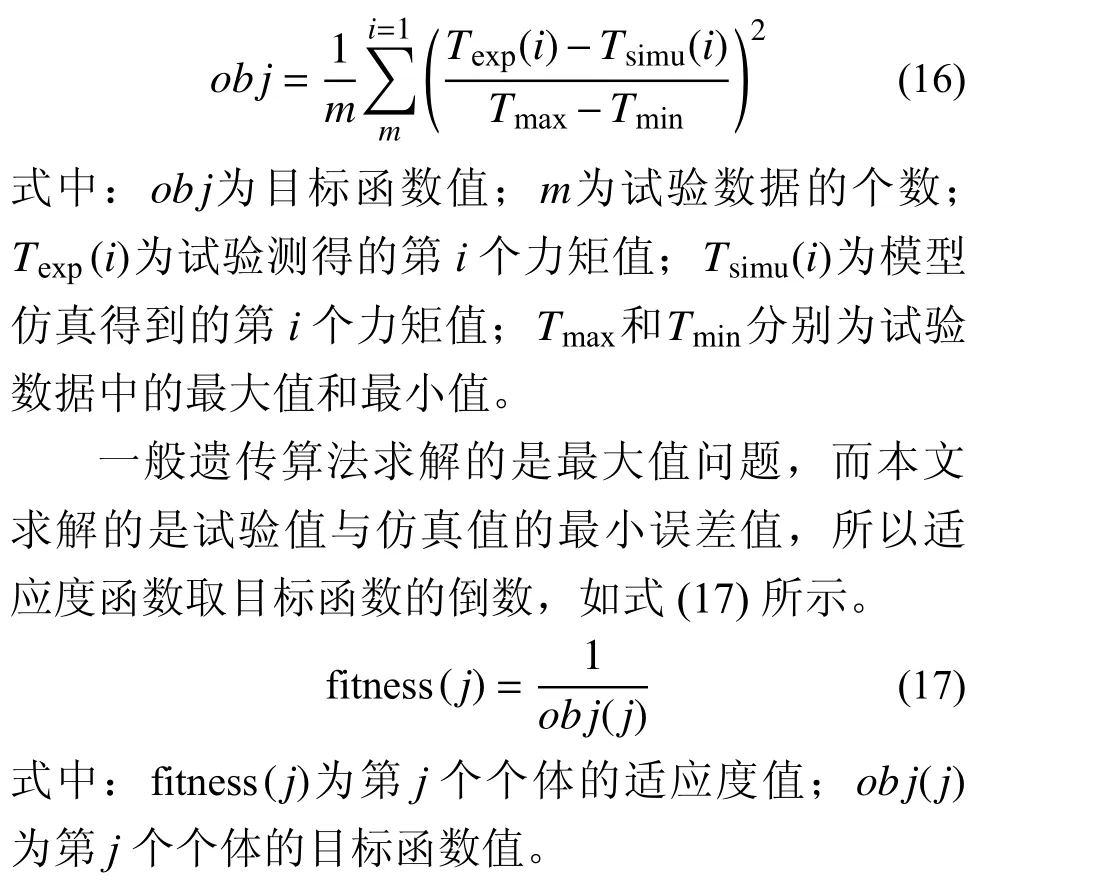
3 改進(jìn)的自適應(yīng)遺傳算法
在選用合適的目標(biāo)函數(shù)和適應(yīng)度函數(shù)之后,需確定遺傳操作中的交叉概率和變異概率,一般遺傳算法的交叉概率和變異概率為固定值,所以在交叉變異的過程中會出現(xiàn)適應(yīng)度較好的個體仍被淘汰的現(xiàn)象,針對這一問題,自適應(yīng)遺傳算法根據(jù)個體的適應(yīng)度值來計(jì)算交叉概率和變異概率[30],具體計(jì)算方法如式(18)和式(19)所示。
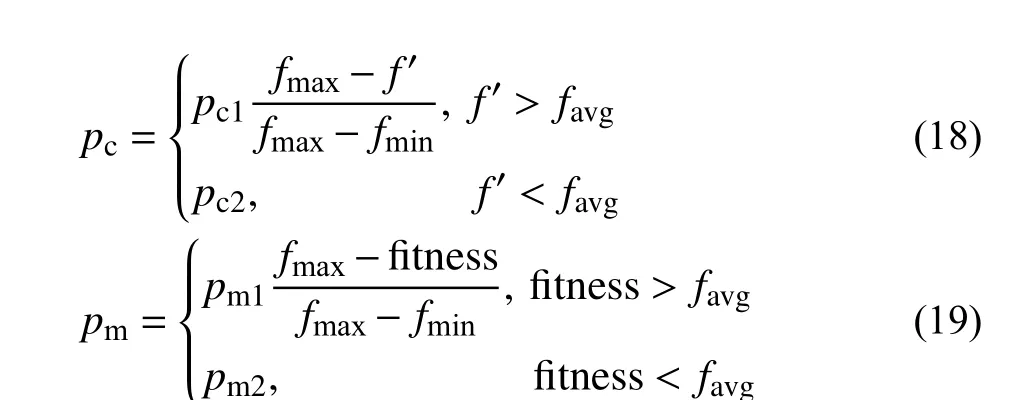
式中:fmax為種群中適應(yīng)度值的最大值;fmin為種群中適應(yīng)度值的最小值;f′為兩個交叉?zhèn)€體中適應(yīng)度值的最大值;favg為種群中適應(yīng)度值的平均值;pc1和pc2為交叉概率系數(shù);pm1和pm2為變異概率系數(shù)。一般來說,pc1和pm1取一個較小值,pc2和pm2取一個較大值,這樣可以使得適應(yīng)度值小的個體有更大概率進(jìn)行交叉和變異,適應(yīng)度值大的個體更有利于保留下來,從而提高遺傳算法的收斂速度。
為進(jìn)一步提高自適應(yīng)遺傳算法在前期的搜索性能和后期的收斂速度,改進(jìn)的自適應(yīng)遺傳算法在傳統(tǒng)的自適應(yīng)遺傳算法之上,還采用一種新型自適應(yīng)變異因子,它的主要功能是讓個體變異的范圍隨著迭代次數(shù)的增大而減小,其計(jì)算公式如下:

式中:k為迭代次數(shù); st(k)為第k次迭代時的變異因子的值; gmax為最大迭代次數(shù); σ為范圍控制系數(shù),用于確定個體變異的范圍,本文取0.557。改進(jìn)的自適應(yīng)遺傳算法在迭代初期,k值較小,變異因子的值較大,種群在這個階段被選中的個體會產(chǎn)生較大的變異,從而提高算法在前期的全局搜索能力;在迭代后期,k值較大,變異因子的值較小,這個階段被選中的個體會產(chǎn)生較小的變異,從而加強(qiáng)算法在后期尋優(yōu)的精確度和收斂速度。
4 模型驗(yàn)證及誤差分析
4.1 模型辨識結(jié)果及驗(yàn)證
本文基于正弦信號(幅值為2 mm,頻率為4 Hz)激勵時5 種不同電機(jī)位置(0°、180°、270°、315°和360°)下的試驗(yàn)數(shù)據(jù),用改進(jìn)的自適應(yīng)遺傳算法對第3 節(jié)中的三種力學(xué)模型進(jìn)行參數(shù)辨識。
廣義Maxwell 模型參數(shù)辨識的結(jié)果如表1 所示,從表1 中可以看出參數(shù)K和C均隨著電機(jī)位置φ的增大而增大,這與第2 節(jié)中的結(jié)論相符,而參數(shù) β 和 α則在一個小范圍內(nèi)波動。廣義Maxwell 模型仿真曲線與試驗(yàn)曲線的對比如圖9 所示,從圖9中可以看出廣義Maxwell 模型能較好地追蹤阻尼器的變化趨勢,但與實(shí)際力矩之間還有較大誤差。
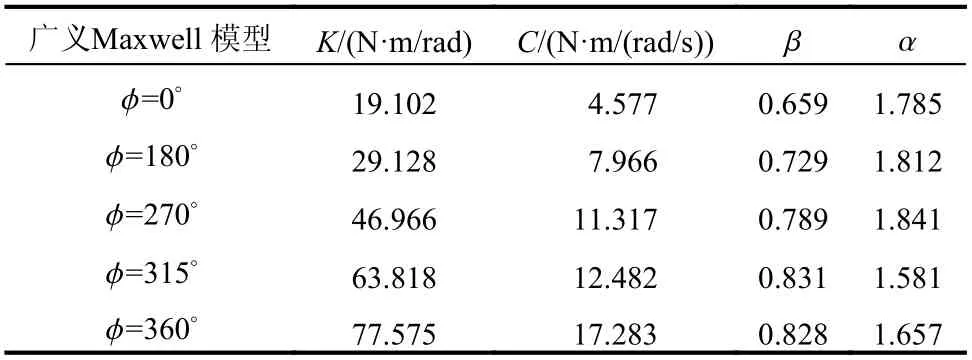
表1 廣義Maxwell 模型參數(shù)辨識結(jié)果Table 1 Parameter identification results of generalized Maxwell model
Bouc-wen 模型參數(shù)辨識的結(jié)果如表2 所示,從表2 中可以得知參數(shù)K和C隨著電機(jī)位置的增大而增大, γ隨著電機(jī)位置 φ的增大先減小后增大, α、β、A沒 有明顯的規(guī)律性,T0則是一個較小的值,說明半主動葉片式阻尼器的偏置力較小。Bouc-wen模型仿真曲線與試驗(yàn)曲線的對比如圖10 所示,從圖10 中可以看出,Bouc-wen 模型無論是在半主動葉片式阻尼器角位移-力矩關(guān)系上,還是角速度-力矩關(guān)系上都能較好地模擬阻尼器的出力,模型精度較高,但Bouc-wen 模型計(jì)算量較大,識別過程中容易出現(xiàn)奇點(diǎn),在搭建半主動控制系統(tǒng)的時候會加大系統(tǒng)的運(yùn)算量,導(dǎo)致系統(tǒng)產(chǎn)生一定量的時滯,這也限制該模型的應(yīng)用[31]。
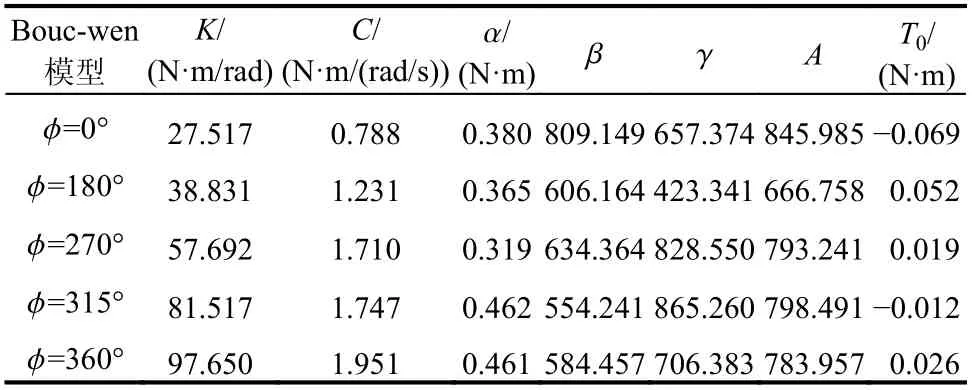
表2 Bouc-wen 模型參數(shù)辨識結(jié)果Table 2 Parameter identification results of Bouc-wen model
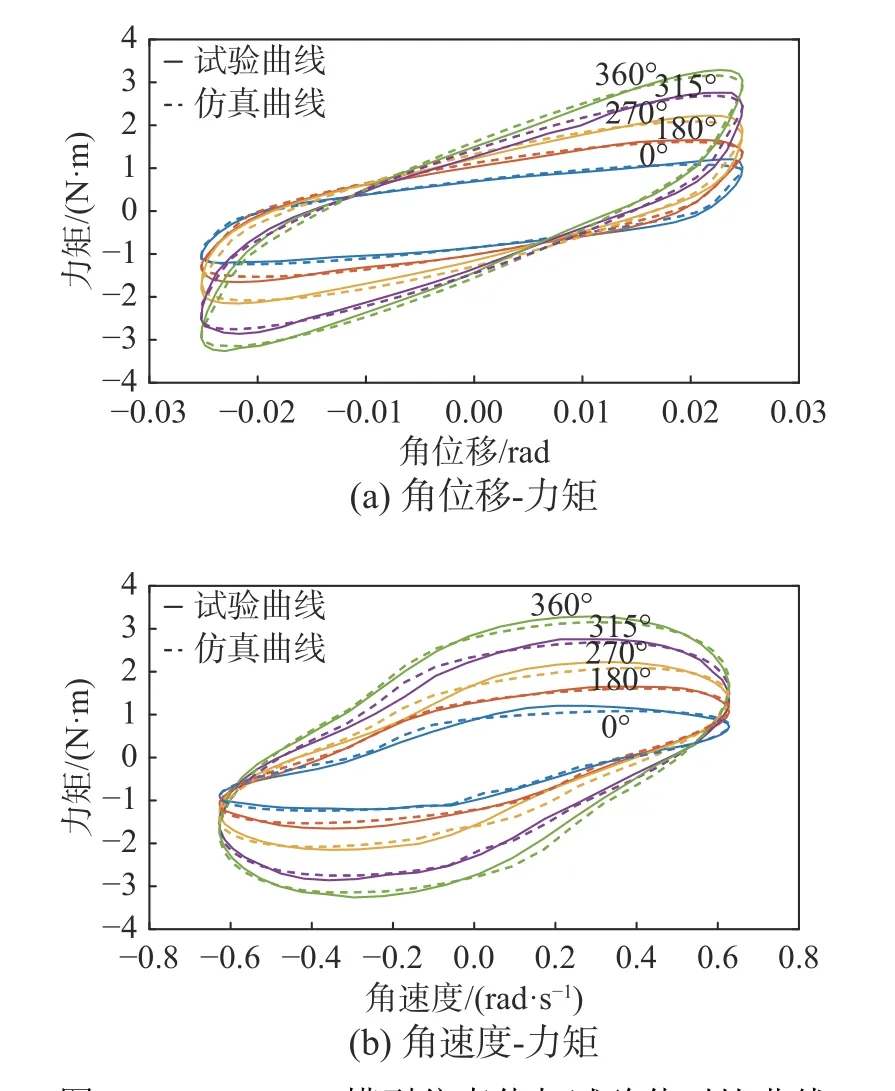
圖10 Bouc-wen 模型仿真值與試驗(yàn)值對比曲線Fig. 10 Comparison curve of simulation value and experimental value of Bouc-wen model
改進(jìn)的雙曲正切模型參數(shù)辨識的結(jié)果如表3所示,從表3 中可以得知,參數(shù)K和C的規(guī)律與前兩種模型表現(xiàn)一致,均是隨著電機(jī)位置 φ的增大而增大;a1一直是靠近1 的數(shù)值,前后波動不大這表明在改進(jìn)的雙曲正切模型中彈簧元件是一個近似線性的彈簧;a2、 α 、 β 和 γ均在一個小區(qū)間內(nèi)波動,T0與Bouc-wen 模型中的值相似,均是一個較小的數(shù)值。改進(jìn)的雙曲正切模型仿真曲線與試驗(yàn)曲線的對比如圖11 所示,從圖11 中可知,改進(jìn)的雙曲正切模型精度較高,能夠精準(zhǔn)地追蹤阻尼器力矩隨角位移和角速度的變化。雖然參數(shù)數(shù)量比Bouc-wen 模型多,但模型中不含復(fù)雜微分方程,計(jì)算簡單,適用于后續(xù)半主動控制的應(yīng)用[32]。
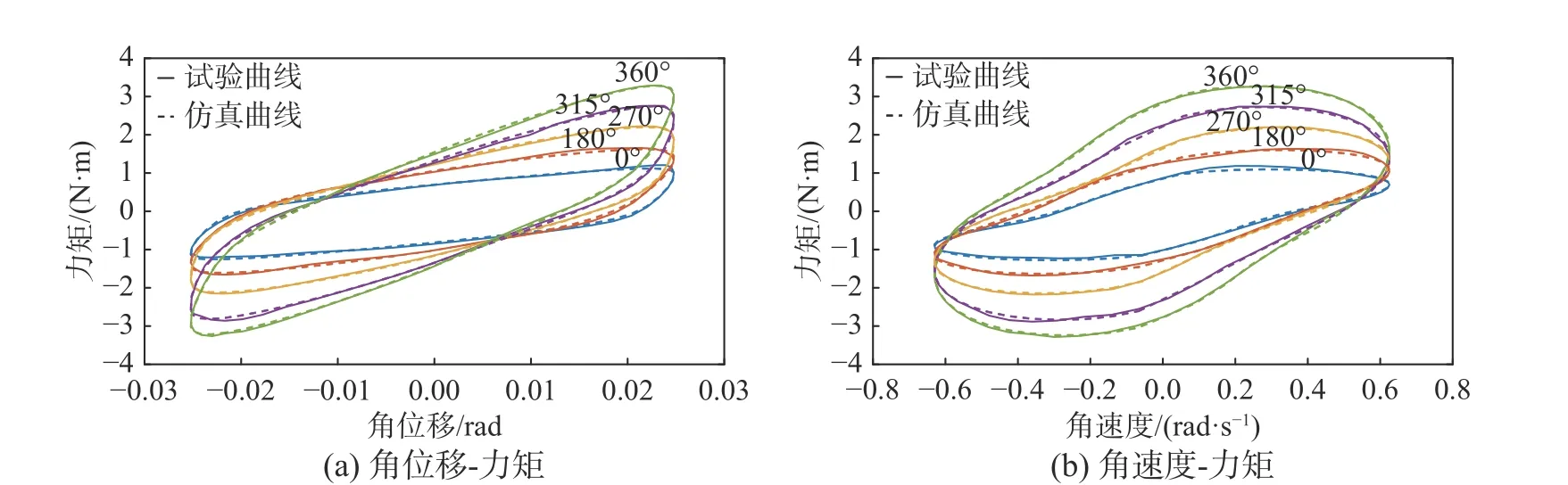
圖11 改進(jìn)的雙曲正切模型仿真值與試驗(yàn)值對比曲線Fig. 11 Comparison curve between simulation value and experimental value of improved hyperbolic tangent model

表3 改進(jìn)的雙曲正切模型參數(shù)辨識結(jié)果Table 3 Parameter identification results of improved hyperbolic tangent model
4.2 誤差分析
為了更清晰地顯示幾種模型的誤差,選用第4節(jié)式(16)來對模型進(jìn)行誤差分析,通過計(jì)算得到的結(jié)果如表4 所示。從表4 中可以看出改進(jìn)的雙曲正切模型的精度是三種模型中最高的,Bouc-wen模型其次,廣義Maxwell 模型最差,表明改進(jìn)的雙曲正切模型適用于半主動控制。
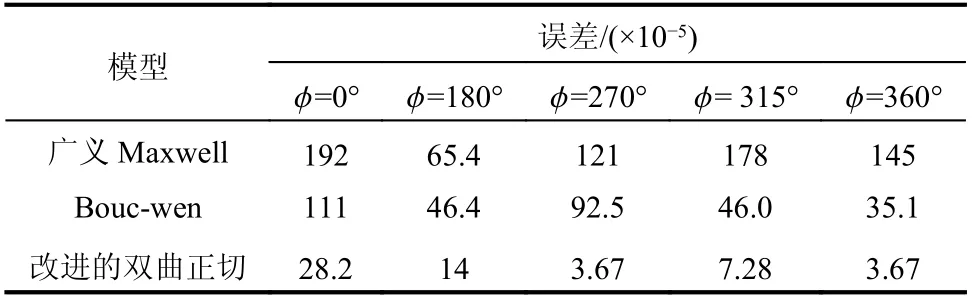
表4 三種模型的誤差Table 4 Errors of three models
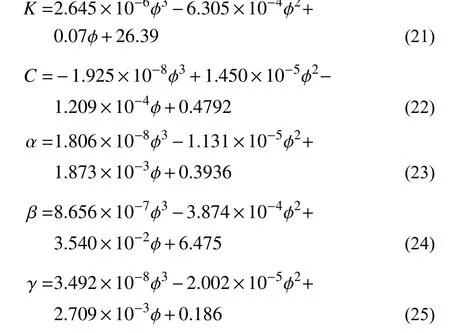
為了讓改進(jìn)的雙曲正切模型可用于半主動控制,需要將各個模型參數(shù)與電機(jī)位置之間的關(guān)系用數(shù)學(xué)表達(dá)式進(jìn)行描述。觀察第5 節(jié)中辨識得到的模型參數(shù),其中參數(shù)K和C隨著電機(jī)位置 φ的增大而增大,參數(shù) α 、 β 和 γ 隨 著電機(jī)位置 φ的增大呈現(xiàn)波動的趨勢,以上參數(shù)與電機(jī)位置之間的關(guān)系可用多項(xiàng)式進(jìn)行整合,整合結(jié)果如圖12 所示。而參數(shù)a1是一個靠近1 的數(shù)值,為簡化計(jì)算,本文認(rèn)為對于半主動葉片式阻尼器,模型中的彈簧元件為線性彈簧,即取1,a2沒有明顯的規(guī)律,用平均值法取0.672。擬合后的參數(shù)表達(dá)式如下:
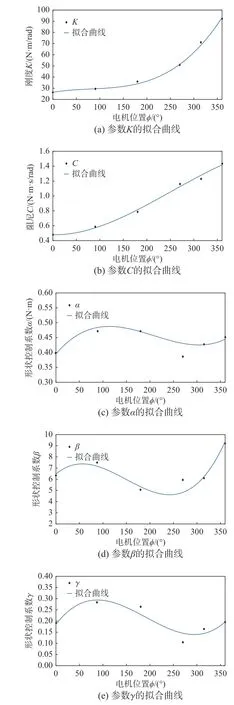
圖12 模型參數(shù)擬合曲線Fig. 12 Fitting curves of model parameters
5 參數(shù)整合
為了驗(yàn)證參數(shù)擬合后的模型在其他工況下的準(zhǔn)確性,選取其它五種工況來驗(yàn)證模型的適應(yīng)性,得到的試驗(yàn)仿真對比曲線如圖13 所示。從圖13 中可以看出,在其他工況下參數(shù)擬合后的模型精度相比參數(shù)辨識的幾種工況,精度雖然略微下降,但仍然能夠保持較好的跟蹤性能,說明改進(jìn)的雙曲正切模型可用于半主動控制中。
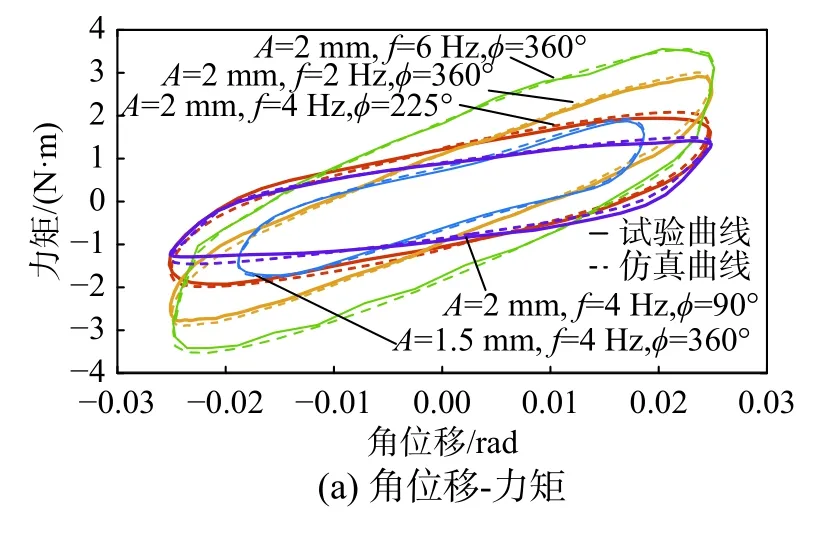
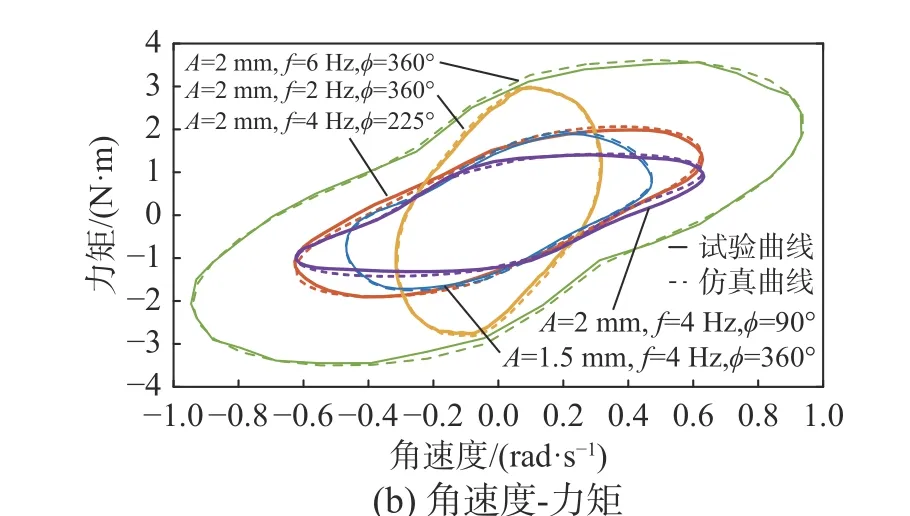
圖13 其它五種工況下改進(jìn)的雙曲正切模型仿真值與試驗(yàn)值對比曲線Fig. 13 Comparison curve of simulation value and test value of Improved hyperbolic tangent model under the other three working conditions
6 結(jié)論
本文提出了一種新型的半主動葉片式阻尼器:
(1)通過MTS 測試了其力學(xué)特性。
(2)為精確跟蹤半主動葉片式阻尼器的力學(xué)特性,提出一種改進(jìn)的雙曲正切模型。
(3)針對基本遺傳算法容易陷入局部極值的缺點(diǎn),采用改進(jìn)的自適應(yīng)遺傳算法對模型參數(shù)進(jìn)行辨識,有效地提高了算法的尋優(yōu)性能,并將辨識后的參數(shù)與電機(jī)位置之間的關(guān)系用多項(xiàng)式進(jìn)行擬合。
通過與試驗(yàn)數(shù)據(jù)的對比分析,表明改進(jìn)的雙曲正切模型具有較高的精度,可應(yīng)用于半主動控制中。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19