基于Smith的模糊PID控制器對熱泵系統過熱度的控制*
2022-10-14 06:55:06趙星凱
計算機時代 2022年10期
關鍵詞:系統
趙星凱,張 迎
(山東建筑大學信息與電氣工程學院,山東 濟南25000)
0 引言
熱泵系統是具有大時滯,強耦合的非線性系統,特別是在溫度控制這方面,溫度反饋慣性大的特點尤為突出。目前在電子膨脹閥控制器的選擇上使用最為廣泛的是PID 控制器,但由于熱泵系統過熱度控制大時滯的特點,傳統PID 難以達到預期的控制效果。太長的響應時間容易引起系統失控,甚至造成系統的損壞,因此,對熱泵系統過熱度的控制方法做出改進,成為很多學者現階段研究的重點。
基于模糊算法不需要精確數學模型這一特點,陳芝久等人認為把PID 算法與模糊算法結合起來,更適合對熱泵系統過熱度進行控制,此后,許多學者針對模糊算法與PID算法的結合做了大量研究。
目前的研究中,模糊算法與傳統PID 算法按照結合方式不同,大抵分為兩類,一類是通過模糊算法直接修正PID 控制器各項參數的串聯控制;另一類是將模糊控制器與PID 控制器并聯,共同輸出控制信號的并聯控制。
朱瑞琪分析了對蒸發器過熱度進行自適應控制的必要性,以模糊算法與PID控制器串聯的方式,實現目標過熱度值得自適應控制。張皓等人提出了基于模糊神經網絡的PID 控制器,很大程度上降低了大時滯、強耦合系統對控制性能指標的影響。
基于PID 控制器與模糊控制器各自的特點,劉紅波等人提出一種模糊PID 并聯控制器的設計方法。在該結構下,模糊控制器和PID控制器獨立作用,能夠分別結合模糊控制和PID 控制各自的優點,但直接相加兩個控制器的輸出,會產生過度控制,降低復合控制器的控制精度。針對常規模糊PID雙模控制切換時存在的問題,李祖欣等人提出了一種根據輸入的偏差量和偏差變化率來實現模糊切換的雙模控制器。陳猛等人提出了一種改進的模糊PID雙模復合控制器,解決了在兩種控制模式之間切換時的閾值選取以及抖動問題。
以上各學者對模糊控制與PID的研究各有其優勢與特點,但并沒有解決熱泵系統大時滯等特點造成的響應不及時的問題。時滯的存在會使控制信號必須經歷一定是時間的延遲后才能到達目標被控對象,這很可能會引起控制器控制性能的劣化甚至引起輸出信號的發散或震蕩。
Smith 預估補償機制是一種廣泛應用于時滯系統的控制方法。其基本原理是預測和補償時滯系統或被控對象的時滯效應。彭章杰等人引入基于空氣能熱泵的模糊PID 算法和Smith 滯后補償互補的控制方式,實驗結果證明,引入Smith 預估補償機制后控制器靈敏度大大提高。
在眾多學者研究的基礎上,筆者通過大量實驗數據總結出較為準確的模糊規則,將模糊算法與傳統PID算法并聯結合,將Smith預估補償機制引入控制器結構中,大大增強復合控制器迅速響應信號的能力;通過添加部分函數計算,在不同情況下按不同的比例混合模糊控制和PID 控制的輸出,在保證控制效果的前提下,提升復合控制器的控制精度,加快響應速度實現了兩個控制器之間的平滑切換。
1 系統分析
壓縮式熱泵系統由壓縮機、冷凝器、電子膨脹閥、蒸發器等核心部件組成的,其通過電能驅動壓縮機將工質蒸汽壓縮到與冷凝溫度相對應的冷凝壓力,是廣泛采用的制冷熱方式。
過熱度,是指蒸發器膨脹閥的低壓側與出口蒸氣之間的溫度差。通常將系統調節在5.6℃過熱度下工作。
在蒸發器出口處制冷劑的過熱度等于出口處制冷劑的實際溫度與蒸發溫度的差值,對蒸發器出口處制冷劑的過熱度進行控制的目的主要是:使蒸發器管內制冷劑蒸干點的位置在蒸發器的出口處。如果在蒸發器出口處的制冷劑過熱度過高,則表明蒸發器內部的傳熱面積并沒有進行充分的利用,而且使熱泵系統的工作效率下降;如果在蒸發器出口處的制冷劑過熱度太低,則說明管內的部分液態的制冷劑還沒有完全汽化,那么當壓縮機吸制冷劑蒸汽時,可能會是液態制冷劑進入壓縮機內部,這有損壞壓縮機的危險。過熱度原理如圖1所示。
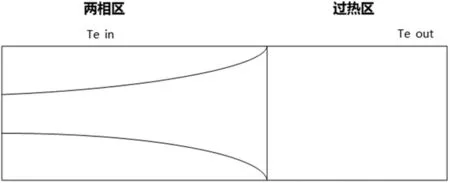
圖1 發器過熱度示意圖
2 控制策略及實現
2.1 PID控制原理
PID 控制是目前工業上應用很廣泛的控制方式,其在時域中根據反饋誤差計算如下:

2.2 PID參數整定
將PID 模塊加入仿真系統后,在各項參數沒有調整好之前,PID 模塊并不能穩定控制,因此,需要預先對PID 模塊、、三個參數進行整定,整定方法有很多種,筆者采用Ziegler-Nichols 法對PID 模塊進行調參。
調參主要分為兩個部分,首先基于被控模型構建控制回路,確定穩態極限,即通過調節的值使系統出現穩態震蕩。而后基于處于穩態震蕩狀態的波形根據公式計算出控制器的各項參數。
2.3 模糊控制器的設計
2.3.1 模糊模塊的基礎參數
根據現有熱泵系統的實際工況,模糊控制器采用兩輸入一輸出的二維控制,模糊模塊輸入分別為誤差和誤差變化率。設定兩個輸入的實際論域分別為[-6,6]和[-0.3,0.3]。考慮到電子膨脹閥閥門開度變化的平穩性和過熱度的控制精度,輸入量均分為七個模糊量化語言,為{PB(正大),PM(正中)、PS(正小)、Z(零)、NS(負小)、NM(負中)、NB(負大)}。模糊論域分別為[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6]、[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],其量化因子分別為=1 和=20。為了使系統在切換時更加平滑,其二者均采用兩邊S型,中間三角形的隸屬度函數。
模糊模塊的輸出變量為電子膨脹閥的開度,實際輸出量為Δu,其實際論域為[-0.3,0.3]。模糊論域U[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],其量化因子=20。7個量化語言集合為{PB(正大),PM(正中)、PS(正小)、Z(零)、NS(負小)、NM(負中)、NB(負大)}。
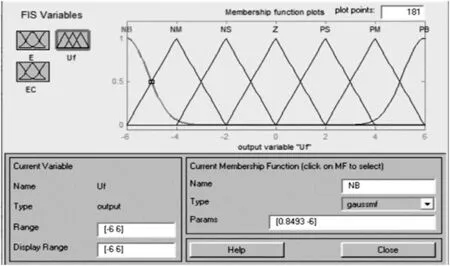
圖2 模糊模塊輸出Uf的參數及隸屬度函數
2.3.2 控制規則與模糊推理
模糊規則的制定,是控制效果好壞的關鍵所在,根據前者經驗,以及大量的實際操作、調試所得到的經驗總結,結合實際熱泵系統中過熱度變化的特性,模糊規則的制定應考慮實際情況:在模糊PID 并聯結構下,模糊模塊的主要作用就是對大的誤差進行快速響應。因此在模糊規則的設定上,我們應當在保證準確的基礎上,對大誤差的響應應該快速且大幅度。當誤差迅速減小到一定程度時,PID 模塊開始起主要控制作用,進行精細調整。具體標準為:
⑴當過大時,為盡快將過熱度恢復到指定值,電子膨脹閥開度應取反向最大值;
⑵而當與一正一負時,為保持系統穩定性,U只做中等程度的調整;
⑶若與同號,則取決于的程度,若誤差大,則輸出反向取大,若誤差小則反向取小;
⑷若為0 且不為0,則視即誤差變化趨勢而定。
模糊規則以“IFIS PB,AND Ec IS PB,THEN U IS PB”的語言形式及進行描述,最終設計出49 條模糊控制規則。模糊控制器根據模糊規則做出決策,控制規則見表1。
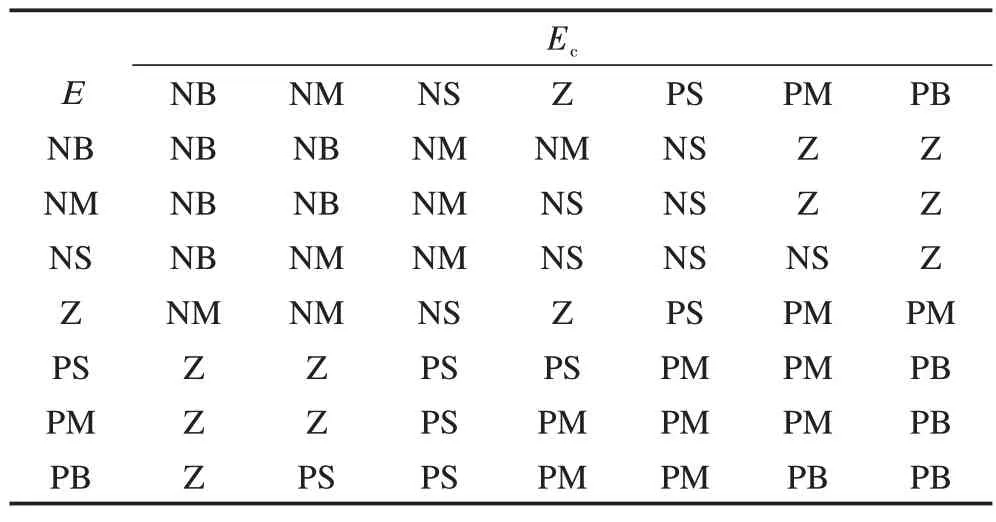
表1 模糊控制規則
3 模糊PID并聯控制器的設計與改進
3.1 模糊PID并聯控制器結構
模糊控制屬于非線性控制,是智能控制算法的一類。根據大量實驗經驗作為模糊規則的制定原則,對實際過熱度控制有良好的效果。但是,由于模糊模塊在處理輸入輸出信號時,需要做取整運算,量化取整操作可能會導致系統在應對處理偏小誤差時控制不精確。因此,筆者將模糊算法與PID 算法并連方式結合,更適用于熱泵系統這種大遲滯的復雜系統。在過熱度設定值與實際過熱度誤差較大時側重于使用模糊控制的方法,迅速調節,當誤差減小時側重于使用PID控制,精確調整。控制器結構如圖3所示。
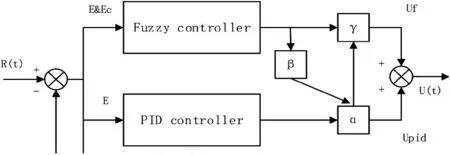
圖3 模糊PID并聯控制器結構
過熱度設定值與系統實際過熱度的差值及其導數均輸入到模糊模塊進行決策判斷,偏差單獨輸入PID 控制器,兩個控制器分別運行并輸出控制信號。根據模糊模塊輸出值的大小調整PID控制器的系數α 的大小,通過改變α 和γ 的值調整模糊控制器和PID控制器的輸出在總輸出信號中的比例。
模糊PID并聯控制的輸出形式如下:
其中,和的值是以模糊模塊的輸出為基礎的。當系統實際過熱度與設定值相差較大時模糊模塊在模糊規則的判斷下,會輸出一個較大的校正值,相應的就會變小變大,此時并聯控制器中模糊模塊輸出的比重就變大了,輸出主要取決于模糊控制器;反之,則輸出主要取決于PID模塊。
3.2 Smith預估補償機制
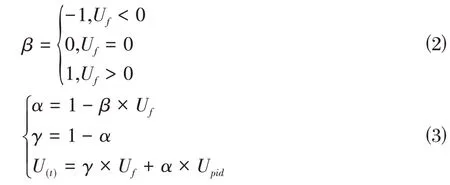
Smith 預估補償機制的工作原理是在系統的反饋回路中引入補償裝置,以消除滯后因素對系統的影響。通過預測補償裝置提前將滯后因素反映在系統之前的系列控制器,控制通道滯后傳遞函數的因素和其他部分分離,消除滯后因素對系統的影響,在一定程度上,加快了系統的調節時間,使系統以最快的速度趨于穩定,消除了系統的超調。大多數情況下,時滯系統結構如圖4所示。

圖4 時滯系統結構簡圖
圖4中,(s)=(s)e是系統被控對象的傳遞函數,(s)是(s)中非時滯部分傳遞函數,(s)為系統前向控制器。Smith 預估補償機制的原理就是在控制器(s)前后并聯一個補償環節,用來補償被控對象的時滯部分,這便是Smith 預估補償器。預估補償器的傳函一般記作(s)(1-e)。因此,其結構如圖5所示。
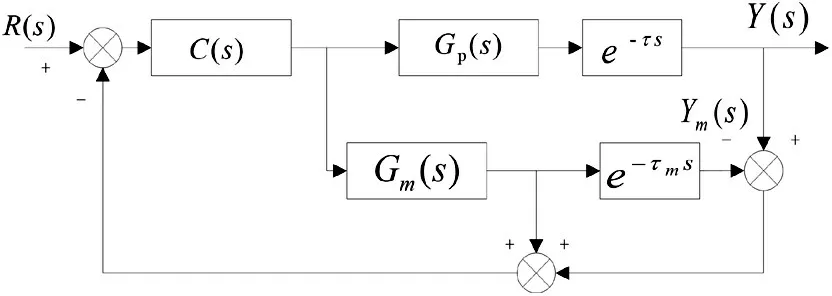
圖5 Smith預估補償器結構圖
(s)為被控對象非時滯部分傳函,為被控對象時滯因子,(s)為預估模型不包含純時滯特性的傳遞函數,為預估模型的時滯因子。(s)為前向控制器,(s)為系統的輸入,(s)為系統的輸出,Y()為預估的系統輸出,系統的補償器記作(s),傳函為:

分析圖5可知,系統的閉環傳遞函數為:

通常認為,Smith 預估補償器中被控對象和預估模型相互匹配,即(s)=(s),=τm時,

據此可知,時滯系統閉環傳遞函數在引入Smith預估補償機制后,滯后因子e已經與系統其他部分隔離開。預估補償機制不會影響系統的穩定性,只是將輸出滯后了一段時間。

圖6 系統等效結構圖
由式(6)可知,模型匹配的情況下閉環系統的特征方程為:

由此可知,系統的特征方程中并不包含時滯因子,能夠有效減小系統的超調量,從而提高系統的穩定性。
4 Matlab仿真及應用
為驗證實驗結果,根據熱泵系統蒸發器的特性,筆者應用蒸發器過熱度控制的一階慣性環節加純滯后模型進行仿真實驗,傳遞函數如下:

控制器基本結構如圖7 所示,為引入Smith 預估補償機制的模糊PID并聯控制器。
圖7 控制器基本結構圖
在Simulink 仿真軟件中分別搭建基于Smith 預估補償機制的模糊并聯控制器、傳統PID 控制及模糊控制的模型,基于Smith 預估補償機制的模糊PID 并聯控制器的Simulink模型如圖8所示。

圖8 基于Smith預估補償的模糊PID控制器仿真模型
把基于Smith 預估補償的模糊PID 控制器、模糊PID 并聯控制器和傳統PID 控制器的仿真模型搭建完畢后,將三種控制器的控制效果進行對比,其控制效果見圖9。
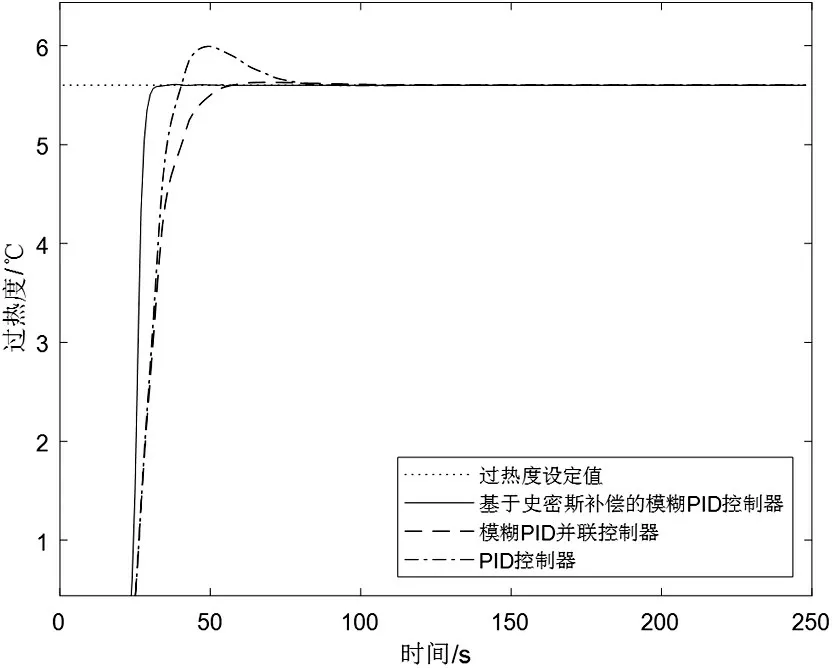
圖9 三種控制器仿真效果對比圖
三種控制器對過熱度控制的各項性能指標如表2所示。
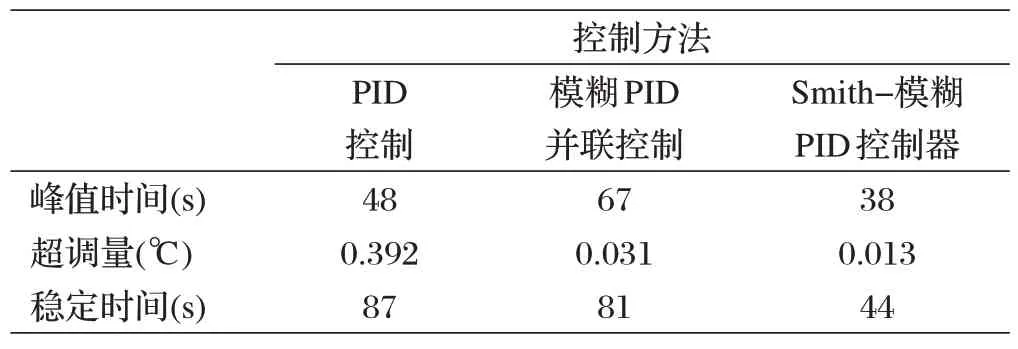
表2 系統仿真各項性能指標
對比各控制器的各項性能指標,可以看出在PID控制器的基礎上引入模糊環節后,能夠明顯的降低超調量,但沒有解決熱泵系統大時滯的問題,控制效果滯后。這一問題在結合Smith 預估補償機制后,得到了明顯的改善,基于Smith 預估補償機制的模糊PID控制器在穩定時間和峰值時間上明顯優于其余兩種控制器,其能夠在接收到信號后快速動作,大大改善了過熱度控制的滯后性。
5 結束語
為了改善和解決由于熱泵系統過熱度控制的滯后性、強耦合等特點造成的難以精確控制這類問題,本文將模糊控制、Smith預估補償機制及PID控制三種思想結合,提出了一種基于Smith預估補償機制的模糊PID 控制方法,對熱泵系統蒸發器的過熱度進行控制。該控制器相較于傳統PID 控制器和模糊PID 控制器,具有響應迅速且超調量小的優勢,更適用于過熱度控制這類大遲滯的復雜系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32