
基于數據挖掘的船舶虛擬駕駛效果評價
2022-10-18 12:14:04馬大勇李安卓
艦船科學技術 2022年18期
馬大勇,李安卓
(沈陽航空航天大學,遼寧 沈陽 110000)
0 引 言
海運行業的持續發展對于海員的適任提出更高要求,艦船虛擬駕駛系統的設計與研究能夠訓練海員的艦船駕駛技能,而艦船虛擬駕駛效果的評價對于艦船虛擬駕駛訓練具有重要意義。
朱冰等在研究駕駛效果評價過程中,以自然駕駛數據為基礎,構建自然駕駛數據的邏輯場景,采集駕駛數據,分析參數概率分布,獲取評價結果。但該方法在實際應用過程中所使用的評價指標體系內包含大量冗余指標,導致最終評價結果存在一定偏差。趙曉華等構建柯氏層次評估模型,利用該模型評價駕駛效果,但該方法在實際應用過程中所得結果與實際需求具有顯著的不匹配性。
基于此,研究基于數據挖掘的艦船虛擬駕駛效果評價方法,利用數據挖掘技術中的聚類算法與神經網絡實現艦船虛擬駕駛效果評價,提升艦船駕駛的安全性。
1 艦船虛擬駕駛效果評價方法
1.1 艦船虛擬駕駛效果評價方法體系架構
圖1為基于數據挖掘的艦船虛擬駕駛效果評價方法基本步驟。
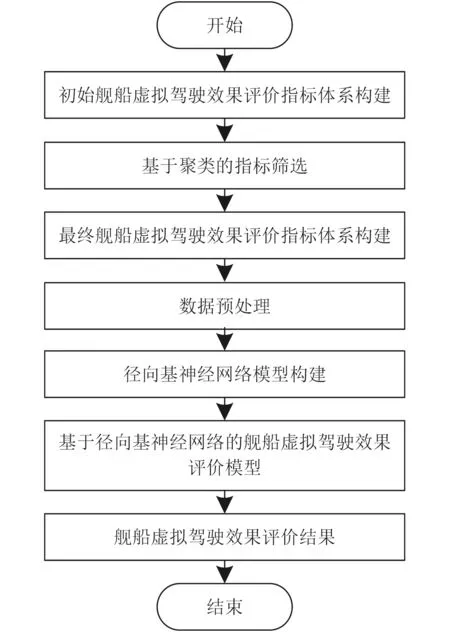
圖1 基于數據挖掘的艦船虛擬駕駛效果評價方法基本步驟Fig. 1 Basic steps of ship virtual driving effect evaluation method based on data mining
依照系統性、層次性、簡潔性、可量化、可對比等原則,選取初始評價指標構建初始艦船虛擬駕駛效果評價指標體系;采用數據挖掘技術中的聚類算法對初始指標體系內的指標進行篩選,清除重復指標,得到最終使用的艦船虛擬駕駛效果評價指標體系;采集評價指標相關數據,同時對所采集數據實施歸一化與標準化等預處理。采用數據挖掘技術中的神經網絡算法構建評價模型:構建徑向基神經網絡模型,采用粒子群優化算法訓練神經網絡,構建基于徑向基神經網絡的艦船虛擬駕駛效果評價模型,得到艦船虛擬駕駛效果評價結果。
1.2 基于聚類算法的評價指標體系構建
1.2.1 初始艦船虛擬駕駛效果評價指標體系構建
艦船虛擬駕駛過程中,以實現任意特定目標為目標,需要求操作者在操作艦船裝置過程中動作的先后順序準確,同時也要求操作的實際與幅度滿足相關標準。上述要求并不具備嚴格標準,一般情況下,采用快、慢、多、少等較為模糊的度量關系表示虛擬駕駛的效果。基于上述分析將從不同組合操作中動作的準確性、駕駛行為銜接的連貫性、駕駛行為柔順性、駕駛行為的效率等方面選取37個二級評價指標構建初始艦船虛擬駕駛效果評價指標體系。
1.2.2 基于聚類算法的評價指標篩選
采用數據挖掘技術中的R聚類算法對初始艦船虛擬駕駛效果評價指標體系內的評價指標進行篩選,清除重復指標,利用剩余的評價指標構建最終使用的艦船虛擬駕駛效果評價指標體系。基于聚類算法的評價指標篩選過程分為聚類分析與變異系數分析,前一部分對處于相同準則層內的評價指標實施分類處理,同時對不同類別內的評價指標實施非參數檢驗,令各類均能夠描述艦船虛擬駕駛效果評價的不同方面;后一部分利用變異系數表征鑒別能力,通過確定相同類別內評價指標的變異系數,系數值越大說明其鑒別能力越強,越能代表類別信息,保留變異系數值最大的評價指標,清除剩余評價指標,由此既能夠保障篩選后的評價指標體系可全方位覆蓋艦船虛擬駕駛效果評價的不同方面,同時還能夠確保有所差異對類內篩選出的評價指標所描述的信息為非重復信息。
聚類分析部分的主要過程如下:
1)利用R型聚類算法對不同準則層內所包含的評價指標進行分類處理,并確定不同類內指標的數量。選取離差平方和法對評價指標R型分層聚類,若任意準則層內所包含的評價指標數量為個,將全部個指標劃分為個類別,由此可利用式(1)確定第類評價指標的離差平方和(=1,2,···,):

基于式 (1) 所獲取的第類評價指標的離差平方和能夠確定全部個類別的整體離差平方和,公式描述如下:

3)確定聚類數量。以防止聚類分析過程中給定條件下的主觀任意性為目的,對聚類分析所獲取的各類評價指標實施非參數K-W檢驗,分析的科學性。上述檢驗過程以各評價指標在數值特征上不具備明顯差異性為基礎。若不同類別的評價指標顯著性等級Sig大于0.05,那么接受說明初始類別數量設定較為科學,也就是相同類評價指標之間不具備明顯差異,聚類數量較為合適。相反,說明初始類別數量設定不科學,需在此實施聚類處理。變異系數分析部分的主要過程如下:
分析評價指標的變異系數就是確定評價指標分辨信息的水平,變異系數同任意評價指標在不同決策單元內的部分變異性之間呈正比例相關,即與評價指標的信息分辨能力之間呈正比例相關。變異系數較小的評價指標需清除。經由清除變異系數較小的評價指標,能夠簡化評價指標體系。利用下式計算第個評價指標的變異系數:

式中:b和h分別表示整體變異系數標準差和均值,其計算公式分別如下:

利用式(4)能夠描述不同評價指標的標準化變異水平。通過上述處理過程后可簡化初始艦船虛擬駕駛效果評價指標體系,得到最終使用的艦船虛擬駕駛效果評價指標體系,如表1所示。
1.3 艦船虛擬駕駛效果評價模型構建
采用數據挖掘技術中的徑向基神經網絡構建艦船虛擬駕駛效果評價模型。作為單隱層、前饋型神經網絡,徑向基神經網絡的主要優勢表現為分類性能好、可最大限度逼近任意非線性不間斷函數。將評價指標體系內的評價指標輸入徑向基神經網絡內,通過訓練與學習過程獲取艦船虛擬駕駛效果評價結果。徑向基神經網絡結構如圖2所示。
利用式(6)能夠獲取徑向基神經網絡的輸出:
式中:={,,}表示輸入向量,即組合操作準確性、駕駛行為連貫性和駕駛行為柔順性;w和η分別表示第個隱含層神經元同輸出層神經元的連接權值和第個隱含層神經元的輸出。
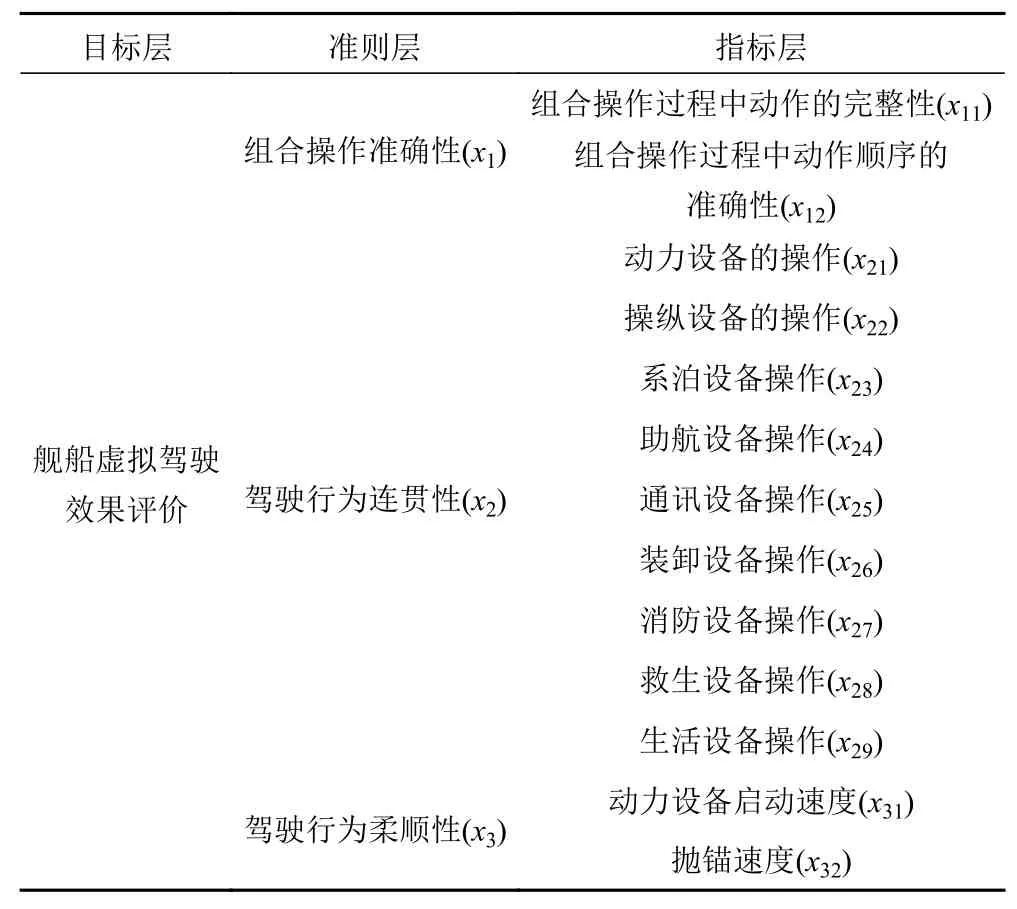
表1 艦船虛擬駕駛效果評價指標體系Tab. 1 Evaluation index system of ship virtual driving effect
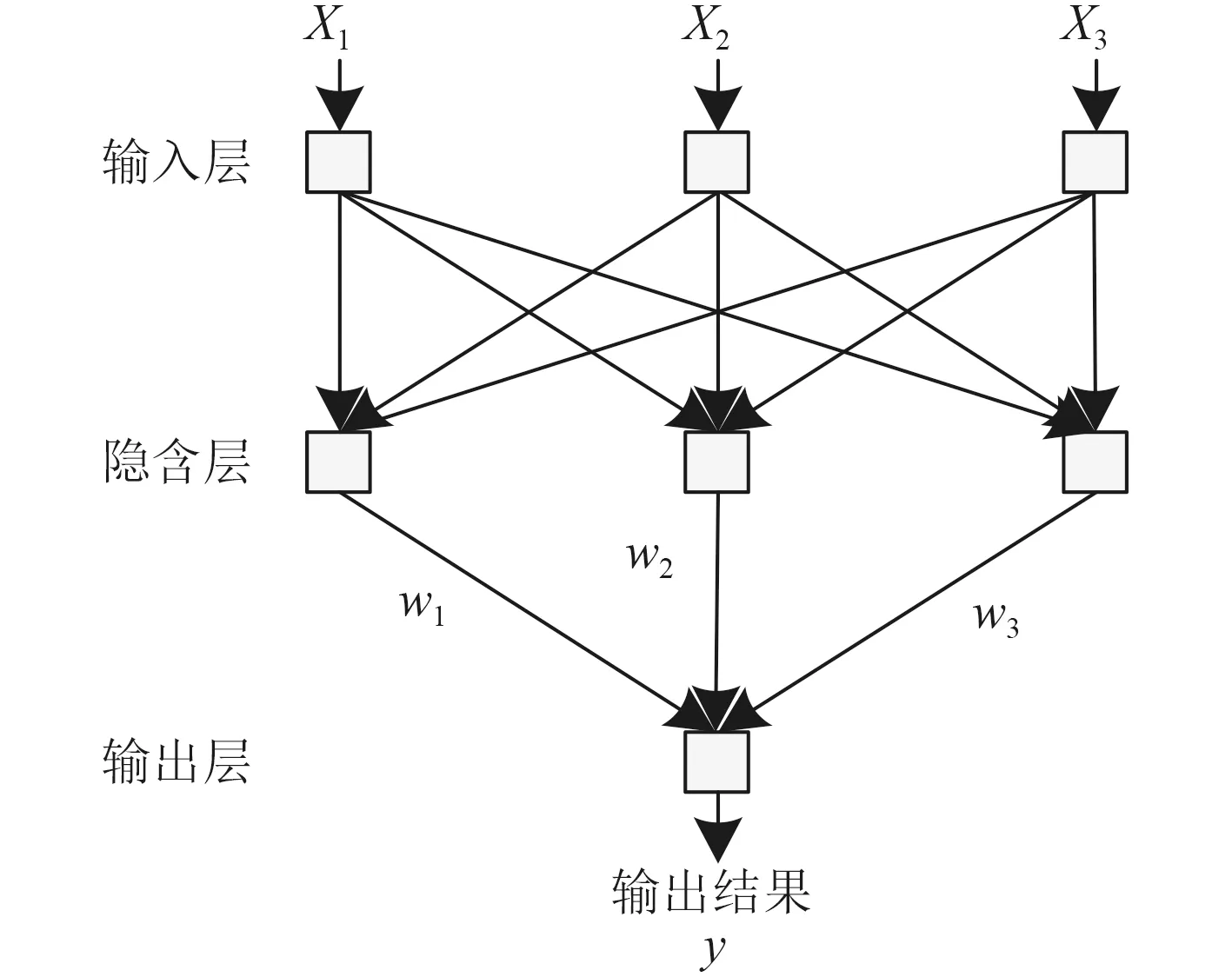
圖2 徑向基神經網絡評價模型結構Fig. 2 Structure of RBF neural network evaluation model
式中,u和δ分別表示中心和方差。
隱含層內所包含的神經元數量通常依照問題的復雜度來計算,神經元數量同神經網絡分類精度之間呈正比例相關;但神經元數量過大將造成神經網絡訓練效率下降,同時有較大概率產生擬合過度的問題。
2 實驗結果與分析
2.1 評價指標體系構建的科學性分析
以數據方差描述評價指標信息含量的原理為基礎,設定評價指標體系構建科學性的分析標準。
以和分別表示篩選后評價指標對海選評價指標的信息貢獻率和評價指標數據的協方差矩陣,則

式中:表示跡;和分別表示篩選后評價指標數量和海選評價指標數量。
通過式(8)能夠描述篩選后評價指標的整體方差與海選評價指標整體方差間的比值,由此能夠獲取篩選后評價指標所描述的海選指標信息。一般情況下,在篩選后指標能夠體現90%以上的海選指標信息,即可說明篩選后的評價指標所構建的評價指標體系科學。
將本文方法篩選后評價指標的整體方差與海選37個評價指標的整體方差代入式(8),得到本文方法所構建的評價指標體系科學性分析結果,如圖3所示。分析可知,對初始評價指標體系內的評價指標進行篩選后,當評價指標數量達到13個條件下,信息貢獻率達到92%以上,由此說明本文方法所構建的評價指標體系具有較高科學性。雖然在評價指標數量持續提升的條件下,信息貢獻率也有所提升,但評價指標體系的復雜度與冗余性也隨之提升。
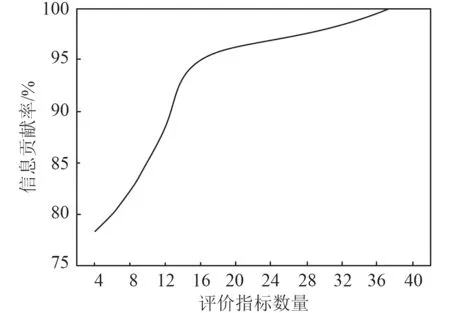
圖3 評價指標體系科學性分析結果Fig. 3 Scientific analysis results of evaluation index system
2.2 徑向基神經網絡測試
圖4為本文方法中所使用的徑向基神經網絡測試結果。分析可知,采用本文方法訓練所得的徑向基神經網絡模型具有較高的評價精度,由此說明本文方法能夠較好地評價艦船虛擬駕駛效果,滿足實際評價所需的精度要求。
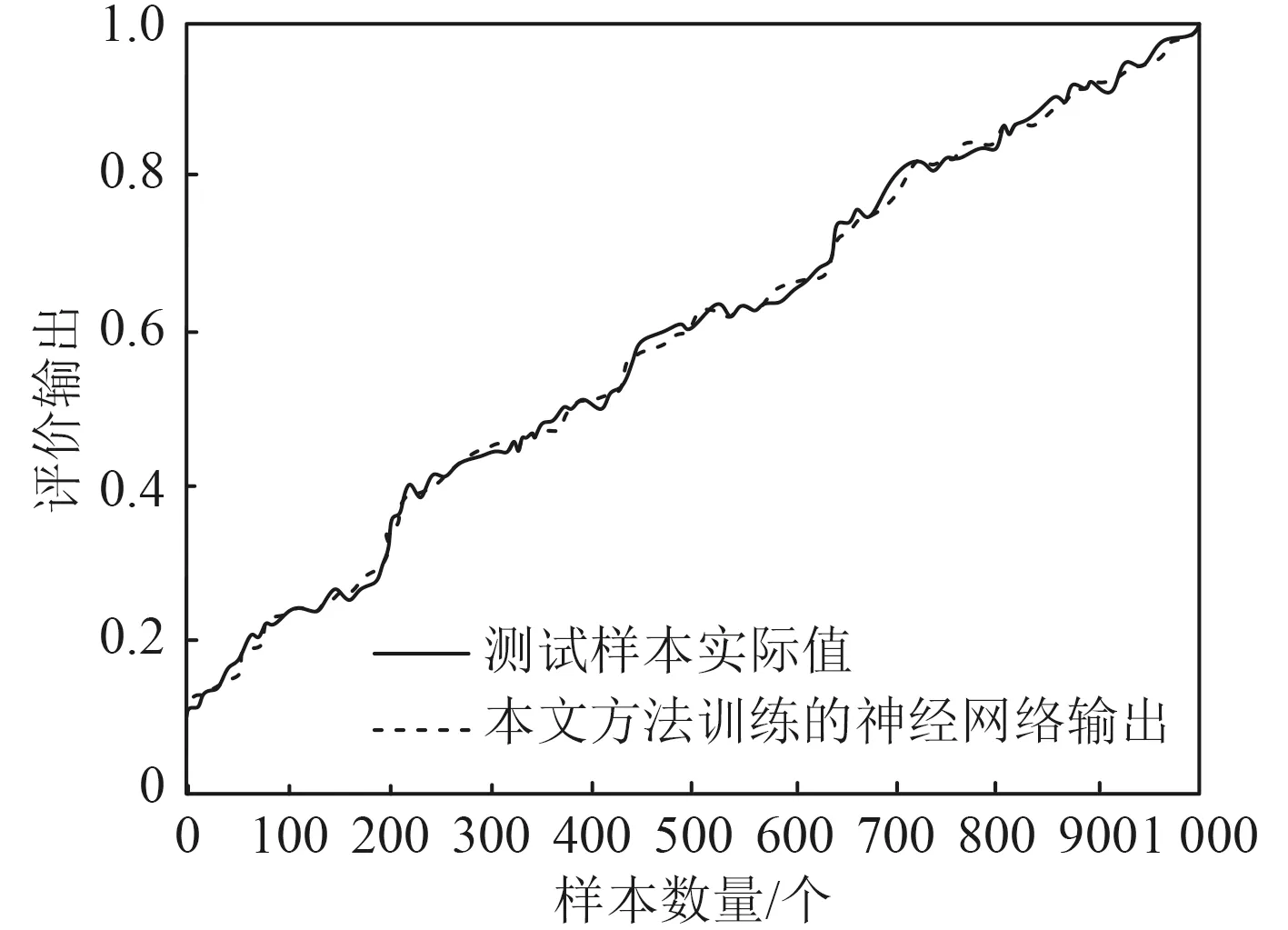
圖4 徑向基神經網絡測試結果Fig. 4 Test results of radial basis function neural network
2.3 評價結果
將實驗對象艦船虛擬駕駛效果劃分為5個等級,分別是:好、較好、中等、較差、差。表2為本文方法對各實驗對象的艦船虛擬駕駛效果評價結果。可知,采用本文方法能夠有效對實驗對象內的艦船虛擬駕駛效果進行評價,且本文方法結果與實驗對象實際艦船虛擬駕駛效果一致,說明本文方法具有較好的評價精度。
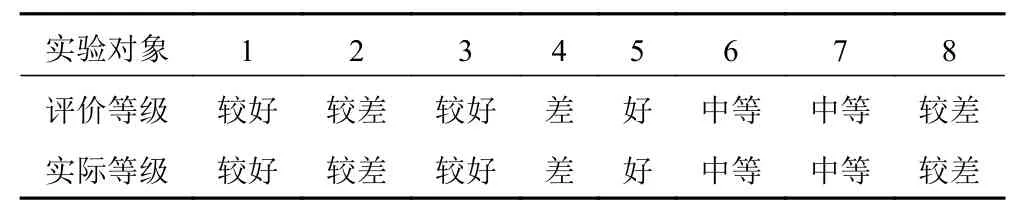
表2 實驗對象審計風險評估結果Tab. 2 Audit risk assessment results of experimental subjects
3 結 語
本文研究基于數據挖掘的艦船虛擬駕駛效果評價方法,采用數據挖掘技術中的聚類算法與神經網絡分別篩選指標和構建評價模型,由此獲取艦船虛擬駕駛效果評價結果。實驗結果顯示本文方法所構建的評價指標體系具有較高科學性,并且能夠準確評價虛擬駕駛效果。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
石油瀝青(2021年4期)2021-10-14 08:50:44
大眾投資指南(2021年35期)2021-02-16 01:06:26
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
電力與能源(2017年6期)2017-05-14 06:19:37
Coco薇(2016年8期)2016-10-09 02:11:50
信息通信技術(2015年6期)2015-12-26 01:16:46
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
電子設計工程(2014年18期)2014-02-27 12:00:13
