烹飪機器人液態調料添加系統設計
2022-10-18 10:11:15張貴元李葉龍黃賢靜王瓊
電腦知識與技術 2022年25期
張貴元 李葉龍 黃賢靜 王瓊

摘要:以Arduino Uon為控制器,綜合運用PWM調速器﹑直流驅動齒輪泵﹑霍爾流量傳感器﹑開關電源﹑電磁繼電器等設計了一種應用于烹飪機器人的液態調料自動添加系統。該系統采用了閉環設計方案,可實現液態調料的快速精確添加,并可在需要時接入物聯網。
關鍵詞:烹飪機器人;Arduino Uon;PWM;液態調料
中圖分類號:TP311? ? ? 文獻標識碼:A
文章編號:1009-3044(2022)25-0107-03
開放科學(資源服務) 標識碼(OSID) :
烹飪機器人通常指具有一定特殊烹飪功能的機器,與工業機器人的命名類似,“烹飪機器人”一詞的含義多指功能與人類似而非外形類似[1]。烹飪機器人的研究起步較晚,至今各項技術仍處于不斷發展完善中。國外烹飪機器人的研究早于國內,以美國和日本較為突出,但多是針對西餐烹飪而設計[2]。中餐因其菜品種類繁多﹑烹制工藝復雜且極具個性化,為此至今未有真正可廣泛推廣的中餐烹飪機器人出現[3-4]。目前,國內該方面的技術多以專利形式出現,缺乏技術細節的報道,國內市場上較為成熟機型均為半自動式炒菜機(遠未達到烹飪機器人的技術范疇) ,即人工加入主輔料及各種調料,機器按照程序自動翻炒,然后人工自鍋內取出菜品[5]。烹飪機器人的典型特征是全自動化與智能化。針對此,本研究的主要目標是設計一套液態調料(料水﹑醬油﹑食物油等) 自動定量添加系統,進而為中餐烹飪機器人的研發提供技術儲備。
1 總體設計方案
系統主要由Arduino Uon開發板、SRD-05VDC-SL-C型繼電器(線圈電壓5V,AC250) 、PWM直流電機調速器(DC6-90V,調速范圍0% ~100%,頻率16KHz,額定電流10A,外接電位器) 、SW-90W型開關電源(0 ~24V可調) 、DHE540齒輪泵(24V直流電機驅動) 、HZ41W霍爾流量傳感器(0.25~2.5L/min,24V) 、噴頭、液體容器、食品級材料所制軟管等組成。
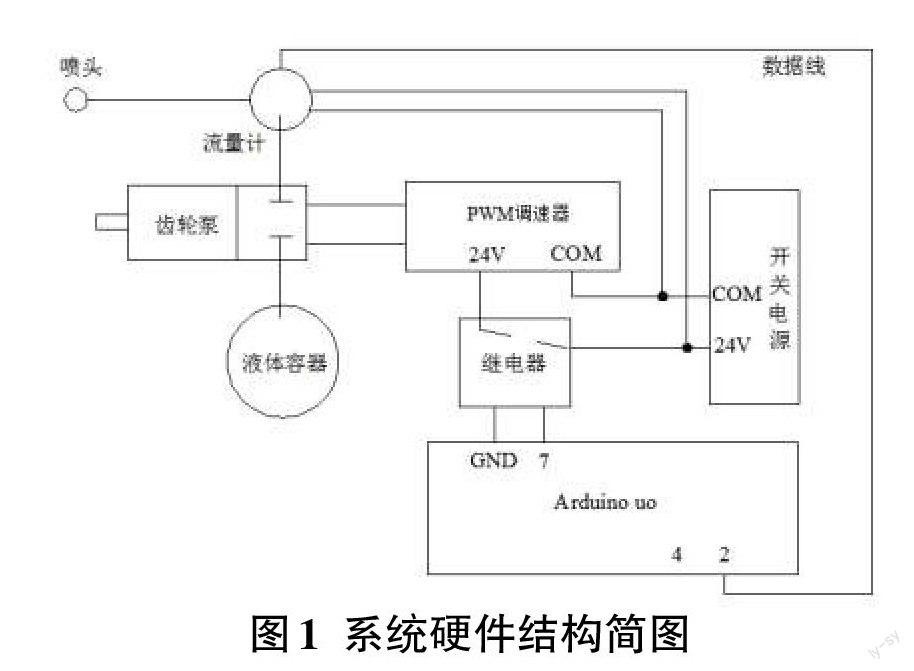
系統硬件結構如圖1所示。開關電源通過繼電器為PWM調速器供電,開關電源同時為霍爾流量傳感器供電,通過Arduino Uon開發板數字口(采用7口) 對繼電器進行關斷,霍爾流量傳感器反饋脈沖接入Arduino Uon開發板數字口(采用2口) ,Arduino Uon開發板數字口(采用4口) 為控制系統的啟動端。
具體工作過程如下:當需要添加液體調料時,通過Arduino Uon開發板 4口發出指令,7口收到指令繼電器工作(為PWM調速器供電) ,PWM調速器根據指令需要為齒輪泵供其所需的電壓(控制流量) ,齒輪泵工作開始添加液體調料,同時霍爾流量傳感器進行計數,當所添加液態調料達到設定值后,霍爾流量傳感器反饋信號給Arduino Uon開發板 2口,2口接收信號后發出繼電器斷電指令,進而完成液態調料的定量添加,本系統為烹飪機器人的子系統,可隨時依據需要進行調用。
2 主要硬件及控制原理
2.1Arduino控制器
Arduino是由一個基于單片機且開放源代碼的硬件平臺和一套為Arduino板編寫程序的開發環境組成。其最初目標是服務非電子專業學生,故具有簡單﹑廉價和易于理解等特點。目前 Arduino家族有Arduino Uon、Arduino Due、Arduino Ter、Arduino Nano、Arduino YUN等多種類型和系列,其中Arduino Uon為基本型也是最常用型。如圖2所示(進口原裝版) ,Arduino Uon有兩排端口,按功能主要分為數字I/O口﹑模擬輸入口和電源口。0~13為數字I/O口,其中0(RX) 和1(TX) 作為通信使用,其中 ~3﹑~5﹑~6﹑~9﹑~10﹑~11提供PWM模擬輸出(~ 表示可作模擬輸出) ;3個GND作為電源負極使用;A0~A5為模擬輸入口;Vin一方面支持12V的電源輸入(為板子供電) ,另一方面可作為5V電源輸出口,1個5V輸出電源和1個3.3V輸出電源。
Arduino編程軟件主要有兩款:Arduino IDE和Mixly_Arduino(米思琪) 。Arduino IDE 是一款專業的Arduino開發工具,主要用于Arduino程序的編寫和開發,擁有開放源代碼的電路圖設計、支持ISP在線燒,同時支持Flash、Max/Msp、PD、C、Processing等多種程序兼容的特點。Mixly_Arduino是一款由北京師范大學教育學部創客教育實驗室傅騫教授團隊開發的圖形化編程軟件,該軟件使用圖形化編程的方式自動生成Arduino代碼,并支持編譯和燒錄到硬件設備中,該軟件最大限度地降低了Arduino的學習門檻,非特別復雜性程序均可利用其實現。
2.2 直流電機調速
(1) 直流電機轉速控制方案
直流電機轉速計算公式[6]如式(1) 所示。由式(1) 可知,改變電機轉速可通過三種途徑實現,一是改變電樞電壓,二是改變電樞總電阻,三是改變每極磁通量(勵磁繞組電壓) 。實際應用中最常用的是改變電區電壓。
[n=U-IRKφ]? ? ? ? ? ? ?(1)
式中:U為電樞電壓;I為電樞電流;R為電樞電路總電阻;Φ為每極磁通量;K為電機結構參數。
(2) PWM控制轉速
PWM(Pulse Width Modulation) 控制——脈寬調制技術,通過對一系列脈沖寬度進行調制,來等效獲取所需要的波形(幅值和形狀) 。如圖3所示,在方波脈沖周期一定的條件下,通過改變方波占空比來改變輸出電壓的平均值,當占空比為100%時輸出的是電源電壓,占空比為50%時輸出電壓為電源電壓的二分之一,等等,由此通過改變占空比實現電樞電壓的調節。
為此,將PWM調速器(DC6-90V) 的輸出電壓接入齒輪泵驅動電機(額定電壓為24V的直流電機) ,實現直流電機(齒輪泵) 轉速的調節,進而實現液體流速的控制。
2.3 霍爾流量傳感器
霍爾流量傳感器是利用霍爾效應測量液體流量的傳感器件,在霍爾元件的正極串入負載電阻,通上相應直流電壓并使電流方向與磁場方向正交,當液體通過葉輪推動磁性轉子轉動時,產生不同磁極的旋轉磁場,切割磁感應線,產生高低脈沖電平,由于霍爾元件的輸出脈沖信號頻率與磁性轉子的轉速成正比,轉子的轉速又與液體流量成正比,由此可通過流量傳感器輸出的單位時間內脈沖數得出流量。
流量傳感器均標有流量范圍,當流量低于最低值(稱為最小啟動流量) 時傳感器無法啟動,而由于自身結構參數等的限制,待測流量亦不能超出傳感器的最大量程。為此,在選擇流量傳感器時需根據需要選擇合適的量程。霍爾流量計按材質可分為銅質﹑不銹鋼和POM塑料3種,按接口大小有6mm外徑﹑10mm外徑等多種型號,其口徑越小精度越高,設計時依據自身需求合理選擇管路口徑并能夠和傳感器實現匹配。如圖4所示,本設計采用HZ41W霍爾流量傳感器(0.25~2.5L/min,24V) 。
2.4 繼電器
繼電器是一種電子控制器件,它由控制系統(輸入回路) 和被控制系統(輸出回路) 組成,是用較小電流(電壓) 控制較大電流(電壓) 的一種“自動開關”,按照工作的原理可分為電磁繼電器、熱敏干簧繼電器、光繼電器等。
如圖5所示,電磁繼電器一般由鐵芯、線圈(纏繞在磁鐵芯上) 、銜鐵、彈簧等組成的。由杠桿原理銜鐵在彈簧的作用抬起,當線圈接通低壓電源后,產生磁效應,銜鐵在磁力的作用下吸合,進而帶動金屬片下移將常開觸點接通,從而接通高壓回路;斷開線圈電源,磁力消失,銜鐵(觸點) 復位,切斷高壓回路。
1.負載;2觸點;3.金屬片;4.線圈;5.銜鐵;6.彈簧
2.5 開關電源
開關式穩壓電源控制方式分為調寬式和調頻式。在實際應用中調寬式應用較多,在目前開發和使用的開關電源集成電路中,絕大多數為脈寬調制型。調寬式開關穩壓電源原理如圖6所示。由圖6可見,開關電源輸出電壓(周期內平均電壓) 滿足式(2) 。
[UO=UmT1T]? ? ? ? ? ? ? ? ? ? ? ? ?(2)
式中Um為矩形脈沖最大值;T為矩形脈沖周期;T1為矩形脈沖寬度;UO為輸出電壓。
由式(2) 可知,當脈沖周期T和脈沖幅值Um一定時,UO與T1成正比。為此,當設法使脈沖寬度隨穩壓電源輸出電壓的增高而變窄或隨穩壓電源輸出電壓的降低而變寬,即可達到穩壓的目的。
開關電源的基本原理如圖7所示。交流電壓經過整流濾波電路后,變成含有一定脈動成分的直流電壓(高壓) ,該電壓進入高頻變換器被轉換成所需電壓值的方波,之后再將這個方波整流濾波為所需的直流電壓。控制電路本質是一種脈寬調制器,輸出電壓被取樣并通過比較器與基準電壓進行比較,從而完成脈寬調制,最終實現對高頻開關元件開關時間比例的調節,最終達成穩定輸出電壓的目的。
3 算法實現
3.1 流量與脈沖數標定
本設計所選取的HZ41W型霍爾流量傳感器在流量范圍0.25L/min~2.5L/min,額定電壓24V條件下,累積流量與脈沖關系滿足式(3) 。設需添加X mL液體調料(按水進行計算) ,其所需脈沖數為n,則脈沖數n與累積流量的關系滿足式(4) 。
[1000ml=5295Hz±5%]? ? ? ? (3)
[n=5295(1±5%)X1000]? ? ? ?(4)
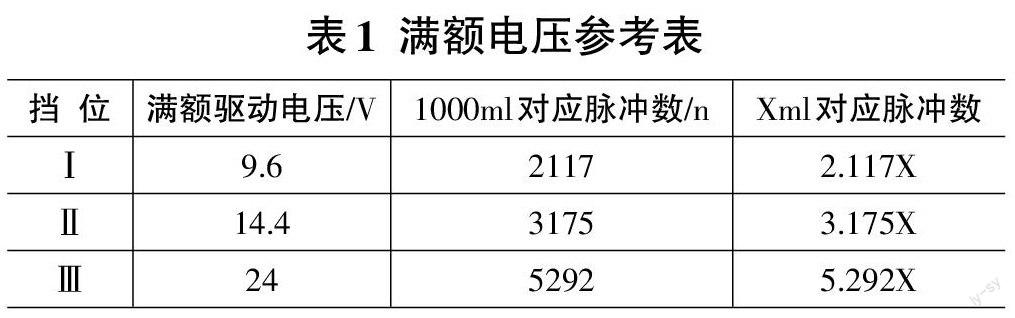
本設計取PWM調速為40%﹑60%﹑100%三個檔位(見表1) ,即驅動電壓分別為9.6V、14.4V和24V,首先通過試驗對前兩種電壓條件下的累積流量與脈沖關系進行標定,之后利用式(4) 即可得出在三種檔位下添加XmL液體調料所需脈沖數。當需要改變液體調料量及調速值(電壓值) 時可按照此方法進行標定及計算,進而得出不同擋位及調料量時的脈沖數。
3.2 系統算法
本設計作為自動炒菜機的子系統,可通過手動控制及主程序調用來啟動,其算法如圖8所示。當系統被調用時接口4置1,進而輸出口7置高電平繼電器動作PWM調速模塊輸出電壓(具體值可以事先手動設置) ,液體調料開始添加霍爾流量計開始產生脈沖,脈沖被反饋到接口2,并對脈沖進行計數,當達到所需脈沖數時,發出信號將接口7置低電平0,電源被切斷,液體調料停止添加。當再次需要添加液體調料時,再次調用此系統即可。
4 小結
全自動化中餐烹飪機器人的控制系統較為復雜,一般包括(但不限于) 液態調料控制系統﹑固態調料控制系統﹑火力控制系統﹑主輔料添加系統等,通過各系統的協調運作完成中式菜品的全自動化烹飪過程。本文以Arduino Uon為主控板﹑綜合運用霍爾流量計﹑PWM調速器等電子器件,設計了用于烹飪機器人的液態調料自動添加系統,該系統可實現液態調料的快速精確添加,并且通過接入Wi-Fi模塊或將控制板升級為Arduino Yun的方式快速接入物聯網,進而實現遠程控制。
參考文獻:
[1] 唐建華,周曉燕.機器人技術在中餐菜肴生產中的發展和應用研究[J].食品科技,2009,34(12):125-129.
[2] 唐建華,周曉燕,劉小勇.中國菜肴自動烹飪機器人的研究現狀與展望[J].揚州大學烹飪學報,2007,24(2):24-26,51.
[3] 朱文政,李輝,鞠美玲,等.基于自動烹飪機器人的中式快餐發展模式[J].揚州大學烹飪學報,2011,28(3):30-33.
[4] 劉長發.烹飪機器人研究報告[J].機器人技術與應用,2011(6):13-15.
[5] 任娜.電氣自動化控制系統中人工智能技術的應用[J].南方農機,2017,48(22):89,136.
[6] 秦增煌.電工學(上冊) [M].北京:高等教育出版社,2008.
【通聯編輯:唐一東】
