帶式輸送機節能控制與仿真分析
2022-10-20 08:49:24吳濤
礦山機械 2022年10期
吳 濤
中國神華國際工程有限公司 北京 100010
帶 式輸送機為煤礦綜采工作面的關鍵運輸設備,承擔著綜采工作面煤炭運輸至地面的任務。目前,隨著采煤工藝的不斷改進和采煤能力的不斷提升,帶式輸送機必須朝著大運量、長距離以及高運速的方向發展才能夠滿足實際生產的需求[1]。近年來,隨著計算機及自動化控制在煤礦生產中的應用,實現各類設備的智能化控制,從而達到節能目的也尤為重要。
目前,綜采工作面帶式輸送機主要以恒定速度運行,無法根據工作面的地質條件、給煤速度以及煤炭運量等指標進行自適應、智能控制,難以在滿足工作面煤炭運輸能力的同時,達到提高運輸效率、降低能耗的目的。
1 帶式輸送機運量及負載預測
實時掌握帶式輸送機的實際運輸量并精準預測實時負載,對于實現帶式輸送機的節能智能化控制尤為重要。
1.1 帶式輸送機運量測量方法研究
總的來說,帶式輸送機運量測量方法可分為接觸式測量和非接觸式測量[2]。其中,接觸式測量方法中最具代表性的是電子皮帶秤測量法,該方法所用的電子皮帶秤主要包括速度傳感器、稱重傳感器、稱重框架以及工況機等部件,具體結構如圖 1 所示。
圖 1 中電子皮帶秤配置的稱重傳感器一般為電阻應變式傳感器,該傳感器在實際測量過程中容易受到環境的影響而出現塑性變形,直接表現為傳感器所獲取的數據高于實際值,誤差較大。速度傳感器用于監測帶式輸送機輸送帶的速度。目前,基于直接接觸的電子皮帶秤測量法的測量精度最高可達±0.25%。
非接觸式測量方法主要包括核子皮帶秤測量法、超聲波測距法、激光 CCD 圖像測量法以及激光掃描法等[3]。其中,核子皮帶秤測量法的測量精度可達到±1% 左右,但是該方法中的γ射線具有明顯的放射性,容易對人體造成危害。超聲波測距法的測量精度在很大程度上受制于超聲波測距儀,實踐表明該方法并不能完全適用于運量的主要測試,僅可作為輔助應用于實際運輸中對煤量的定性分析。激光 CCD 圖像測量法對現場工作面的光線要求比較嚴苛,且該方法對圖像的處理時間較長、運算量較大,即響應速度較慢。激光掃描法主要通過所構建的煤體數學模型對運量進行估算,實踐表明該方法不僅測量精度較高,而且對應的測量重復性和相關性可達 98%。
基于當前“智能礦山”的總體建設要求,為了實現煤礦智能化、無人化運行,帶式輸送機煤炭運輸量的測量必須具備高測量精度、高抗干擾特性以及強適應性。綜合對比上述方法,非接觸式測量方法將成為主流,本項目擬采用激光掃描測量法實現對帶式輸送機煤炭運量的測量,所選設備為 CMSV500 防爆三維激光掃描儀,其主要技術參數如表 1 所列。
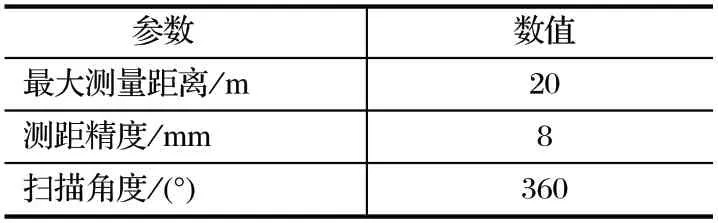
表1 CMSV500 防爆三維激光掃描儀技術參數Tab.1 Technical parameters of CMSV500 explosion-proof 3D laser scanner
1.2 帶式輸送機的負載預測
激光掃描法僅能夠對帶式輸送機輸送帶上的煤炭外形及體積進行測量,無法充分測量煤料的內部堆積情況。因此,單純依靠激光掃描法對煤料進行掃描所得的測量結果實際精度還不夠。為解決這一問題,需要對輸送帶上的煤料負載進行預測。
根據文獻 [4],通過構建單級煤球堆積模型和多級煤球堆積模型,可構建帶式輸送機輸送帶上的煤料顆粒堆積模型。考慮到在實際給煤過程中煤炭會被打碎,筆者采用內切球優化法構建煤料的顆粒模型,進而實現對帶式輸送機輸送帶上煤料負載的精準預測。
2 帶式輸送機節能模型及效果分析
當前帶式輸送機主要采用恒速控制,根據某煤礦主巷帶式輸送機的實際運行狀態,筆者將其運輸系統所面臨的主要問題歸結如下:
(1) 現場帶式輸送機始終恒速運行,運輸速度不能根據輸送帶上的實際運量進行調整,導致其在空載或輕載狀態下能耗過大。
(2) 帶式輸送機所配置的驅動電動機均以保證一定余量的原則進行設計,并采用逆煤流的方向對系統內各個設備進行啟動。上述兩項因素不僅會導致帶式輸送機的能耗較大,還會加劇輸送系統的機械損耗[5]。
為解決以上問題,筆者將對影響帶式輸送機運煤功率的主要因素進行分析,設計帶式輸送機的節能模型,并對其節能效果進行評估。
2.1 節能模型的建立
影響帶式輸送機功率的主要因素有主要阻力、附加阻力、提升阻力和特殊阻力。其中,帶式輸送機運輸過程中的主要阻力指的是壓陷阻力、輸送帶彎曲阻力、托輥旋轉阻力、煤料的變形阻力等。附加阻力主要包括導料槽與帶式輸送機輸送帶之間的摩擦力和落料區煤料與帶式輸送機輸送帶之間的摩擦力,輸送帶長度不同,其對應的附加阻力也不同。提升阻力包括帶式輸送機自身重力和上傾帶來的摩擦力。特殊阻力是指帶式輸送機附加的清掃裝置、卸料裝置以及卷帶裝置運行過程中所引發的阻力。
考慮到帶式輸送機的實際能耗與其工作環境和設備運行狀態相關,為了準確掌握帶式輸送機的能耗情況,本文將采用 MATLAB 軟件對 2個不同工況下的能耗進行分析,并以帶式輸送機的運行速度和運行時間為根本,構建與帶式輸送機輸送帶寬度、物料密度、輸送帶補償長度以及其他機械結構相關的能耗模型。為達到節能智能控制的目的,采用雙層結構的動態優化控制策略,具體如圖 2 所示。
由圖 2 可知,雙層結構的動態優化控制策略包括兩部分,一部分為基于漸消記憶遞推最小二乘法,實現對帶式輸送機運行速度的預測;另一部分為對帶式輸送機運行速度的實時控制,保證輸送帶速度能根據煤量變化進行動態調節。
2.2 節能效果分析
根據對帶式輸送機運量及負載的精準預測,并采用雙層結構的動態優化控制策略對其進行控制,達到的節能效果如表 2 所列。

表2 帶式輸送機動態優化控制節能效果Tab.2 Energy-saving effects of dynamic optimization control for belt conveyor
由表 2 可以看出,采用帶式輸送機動態優化控制策略后,節能效率最高可達 15.88%。同時,在試驗過程中發現,按照所預測的工況對帶速進行控制,其加速度最大不超過 0.3 m/s2,加速度值較小,在很大程度上避免了帶式輸送機輸送帶打滑甚至斷帶故障的發生,極大地提升了帶式輸送機調速的安全性和可靠性。
3 帶式輸送機功率平衡智能控制功能的實現及仿真分析
隨著煤礦生產工作面機械化水平不斷提升,工作面巷道不斷深入,對帶式輸送機的運輸距離、運量以及運輸速度等均提出了更高的要求。傳統單電動機驅動的帶式輸送機已經不能滿足實際生產的需求,目前主要采用雙電動機或三電動機驅動的方式,除了需要實現上述節能智能化控制外,還急需實現功率平衡控制。
3.1 帶式輸送機功率不平衡問題分析
對于多電動機驅動的帶式輸送機而言,由于其本身驅動單機的差異性、設備安裝誤差以及實際生產中的負載不均勻等問題,難免出現功率不平衡。若不及時解決,極易導致其中 1個或 2個電動機出現過載,進而使其燒毀。因此,解決帶式輸送機的功率不平衡問題,不僅有利于綜采工作面的安全生產,而且對于保證運輸效率具有重要意義。經分析可將影響帶式輸送機功率平衡的因素總結如下:
(1) 各傳動部件的效率和傳動比;
(2) 輸送帶拉伸強度;
(3) 在長期的運輸任務中,滾筒粘上物料或出現不同程度的磨損,造成滾筒直徑不同程度增大或減小。
雖然當前采用的主從控制可在一定程度上緩解功率不平衡的問題,但該方式僅能夠依據主電動機的運行狀態對從電動機進行控制,而從電動機的運行狀態不會反饋至主電動機。總的來講,傳統主從控制的精度偏低,無法徹底消除帶式輸送機的功率不平衡問題。因此,筆者提出基于速度補償理念實現帶式輸送機功率平衡控制的策略,如圖 3 所示。
3.2 智能化模糊 PID 控制器的設計
傳統的主從控制方式主要采用 PID 控制器,雖然控制精度較高,但在整個控制過程中超調量較大,穩定性較差。而且,傳統 PID 控制器的自適應能力較差,對于工況負載、載荷變化頻繁的帶式輸送機而言,其最終的控制效果無法從根本上解決功率不平衡的問題。因此,筆者設計了一款智能化模糊 PID 控制器以實現對帶式輸送機的快速穩定響應。
智能化模糊 PID 控制器是指在傳統 PID 控制器的基礎上,引入模糊控制算法,對 PID 控制器的比例、積分以及微分 3個環節的系數實現動態調整,使其能夠根據帶式輸送機的工況對電動機運行參數進行調整。
3.3 智能化模糊 PID 控制效果仿真分析
為驗證智能化模糊 PID 控制器與傳統 PID 控制器的控制效果,基于 Simulink 軟件建立仿真模型,對其進行對比。
3.3.1 仿真模型建立
筆者所研究的帶式輸送機采用雙電動機驅動,2個電動機型號相同,參數一致。因此,在實際生產中2個電動機的功率比為 1∶1。在建立模型時需要參考電動機參數,如表 3 所列。
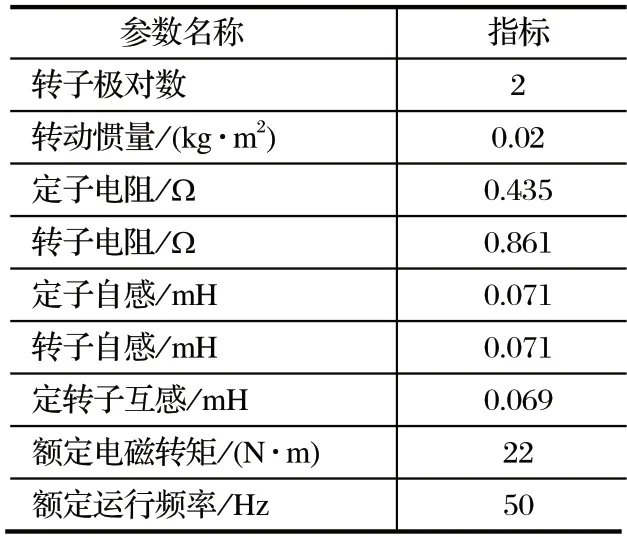
表3 驅動電動機參數Tab.3 Parameters of drive motor
分別根據主從控制策略和基于速度補償的功率平衡控制策略建立 Simulink 仿真模型,并將模型中電動機的參數依據表 3 進行設置。其中,主從控制策略中采用傳統 PID 控制器,比例環節系數為 0.12,積分環節系數為 0.001,微分環節系數為 0.5;基于速度補償的功率平衡控制策略采用智能化模糊 PID 控制器,能夠根據帶式輸送機的實際工況對比例、積分及微分 3個環節系數進行調整。
3.3.2 仿真結果分析
設定帶式輸送機在空載工況下啟動,在仿真時刻為 0.30 s 時分別對 2 臺電動機施加不同的負載,其中頭部驅動電動機負載為 20 N·m,尾部驅動電動機負載為 15 N·m;在仿真時刻為 0.60 s 時引入功率平衡控制策略。本次仿真對引入功率平衡控制策略后 2個電動機的電流變化進行對比,電流可以直接反應功率的變化趨勢,仿真結果如圖 4 所示。
由圖 4 可知,傳統 PID 控制器需要 0.12 s 達到雙電動機的功率平衡控制,在控制過程中電流的最大超調量為 3.58%;而智能化模糊 PID 控制器僅需要 0.04 s 即可達到雙電動機的功率平衡控制,且在控制過程中電動機電流的最大超調量為 0.005 4%。
綜合分析,與采用傳統 PID 控制器的主從控制策略相比,采用智能化模糊 PID 控制器實施基于速度補償的功率平衡控制策略具有更快的響應速度、較小的超調量,能夠實現對帶式輸送機的高精度功率平衡控制,尤其適用于煤礦綜采工作面復雜工況下帶式輸送機的智能化控制。
4 結語
基于帶式輸送機的節能控制需求和多電動機的功率平衡控制需求,開展帶式輸送機智能化控制設計,并對控制效果進行驗證,總結如下:
(1) 采用 CMSV500 防爆三維激光掃描儀并構建負載預測模型,可實現對帶式輸送機運量的精準掌握;
(2) 采用帶式輸送機動態優化控制策略后,節能效率最高可達 15.88%,其加速度最大不超過 0.3 m/s2,加速度值較小,在很大程度上避免了帶式輸送機輸送帶打滑甚至斷帶故障的發生,極大提升了帶式輸送機調速的安全性和可靠性;
(3) 采用基于速度補償的功率平衡控制策略,并引入智能化模糊 PID 控制器,響應速度更快,且在整個控制過程中超調量較小,可實現對帶式輸送機的高精度功率平衡控制。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發展導向(2021年10期)2021-07-16 07:13:24
能源工程(2020年6期)2021-01-26 00:55:22
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
中國交通信息化(2017年4期)2017-06-06 07:21:52
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
