一種高順應性膝關節康復外骨骼設備的設計研發
2022-10-21 04:15:16曾勇
裝備制造技術 2022年7期
曾勇
(廣西水利電力職業技術學院,廣西 南寧 530023)
0 引言
腦卒中是一種血管疾病,會產生嚴重的后遺癥,包括運動障礙、失語癥和認知問題[1]。目前針對腦卒中病人的康復治療主要還是以體力療法為主,如物理治療和職業治療主要依靠理療師的經驗和重復性動作訓練為主[2],這對理療師是一個沉重的負擔,費時又費力,治療效果也不顯著。康復外骨骼不僅可以有效降低康復過程耗費的醫療資源,還可以彌補康復師在體力和準確性方面的不足,提高康復過程的效率,具有非常重要的社會和經濟價值。本設計重點關注的是膝關節康復外骨骼,早期膝關節外骨骼的研究重心在于助力,如美國Yobotics公司研發的名為Roboknee膝關節外骨骼,如圖1所示,通過膝關節角度和地面反作用力確定用戶意圖,助力穿戴者爬樓梯和進行膝蓋深度彎曲[3]。在Roboknee之后,美國麻省理工學院Aaron M.Dollar研究小組在2008年提出的一種便于跑步自動助力膝關節外骨骼,它是通過與膝關節平行安裝的移動彈簧在跑步過程中存儲和釋放能量實現助力[4]。北京工程大學楊廖機器人研究組研發了一款以物理輔助和康復為目的的動力型仿生膝關節外骨骼BioKEX,由兩臺同步電機驅動,通過齒條和連桿傳動帶動膝關節運動[5-6],這使得股骨能夠在脛骨上滾動或者滑動,不是單純的相對轉動,更加符合自然膝關節運動學,具有較高的人機順應性。Beyl.et.al等人研發了一款名為KNEXO的膝關節康復外骨骼,用于研究膝關節在自然運動情況下的肌肉活動的人機交互作用,以便更好的指導下肢的步態康復訓練[7-8]。KNEXO采用氣動仿生肌肉驅動膝關節屈伸,控制屈曲和伸展的氣動裝置通過連桿與外骨骼相連,因此KNEXO也不只是單純的做旋轉運動。

圖1 美國Yobotics公司研發的膝關節外骨骼Roboknee
在人體步行過程中,大、小腿的長度是變化的,膝關節的速度瞬心也是時變的。針對上述情況,本設計基于四桿機構設計下肢膝關節外骨骼,四桿機構具有良好的平面順應性,通過定性的確定各連桿的長度即可設計出與人體下肢膝關節運動瞬心軌跡相似的四桿膝關節。
1 膝關節外骨骼結構設計
1.1 四桿機構運動模型
在人體步行過程中,膝關節在矢狀面內的瞬時轉動中心移動軌跡為J型曲線[9]。由于人體膝關節轉動瞬心具有可變性,與四桿機構的平面運動相近,因而可以設計對應的四桿機構使得其運動瞬間軌跡盡可能與人體下肢膝關節的運動瞬間軌跡重合,這樣基于四桿機構設計的下肢膝關節康復外骨骼就具備了高適應的特性。膝關節四桿機構模型如圖2所示,以D點為原點建立坐標系。各桿長度及其與水平面的夾角分別為li和αi(i=1,2,3,4),桿l1與大腿相連,l3與小腿相連,膝關節的瞬時轉動中心對應四桿機構中的桿l3相對桿l1的轉動中心,即圖中的Q點。
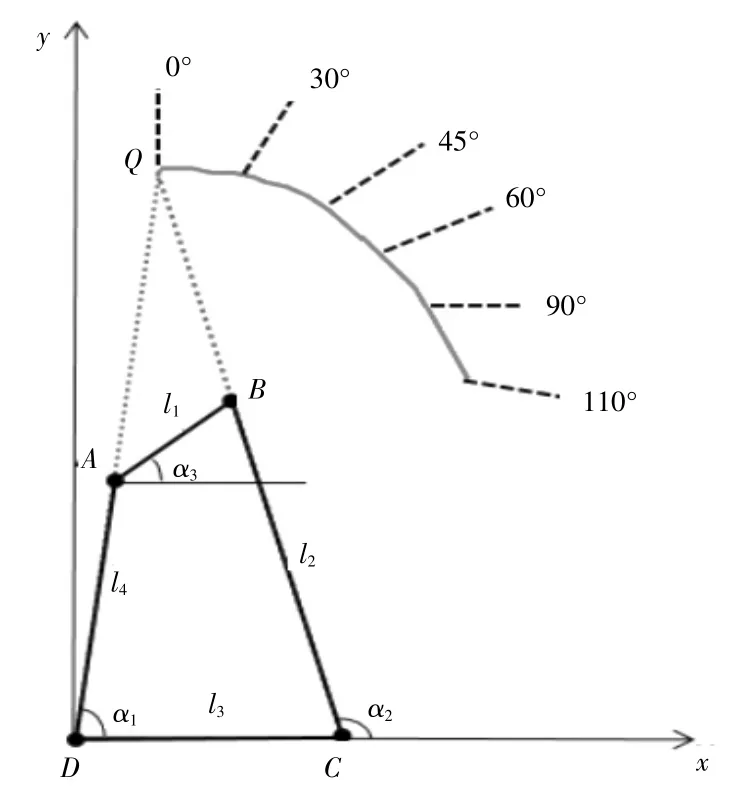
圖2 膝關節四桿機構ABCD
而人體膝關節瞬心軌跡的理想坐標值[10]見表1。

表1 人體膝關節理想瞬心角度及其坐標值
由此確定膝關節的設計思路為通過確定四桿機構的桿長及夾角使Q點的坐標軌跡與上表中的理想瞬心坐標軌跡盡可能的重合,進而得到高順應性的四桿機構模型。
1.2 四桿機構運動瞬心參數化方程的確定
將圖2中的膝關節四桿機構ABCD分別向x軸和y軸投影,則有:

整理可得點Q坐標公式為:
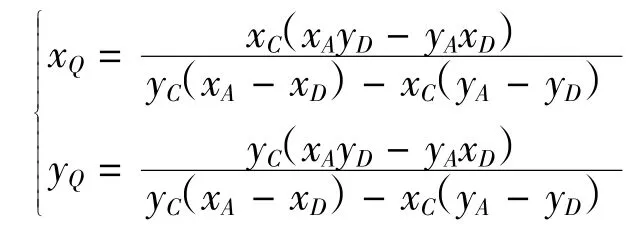
上式即為4個桿長及初始位置角變量的函數關系式。
對四桿機構桿長進行優化是一個非線性的問題,因此選擇MATLAB優化模塊中的fmincon函數進行計算。設計變量為四桿長及機架桿固定角,即:x=(x1,x2,x3,x4,θ1,θ2,θ3)T=(l1,l2,l3,l4,α1,α2,α4)T
以四桿機構瞬心點Q坐標與人體理想瞬心點坐標的差值平方建立目標函數及四桿機構的桿長關系作為約束條件,輸入運算條件運用fmincon函數公式進行優化,得到最優解x及θ,解得的四桿機構各桿尺寸和初始角度表2。
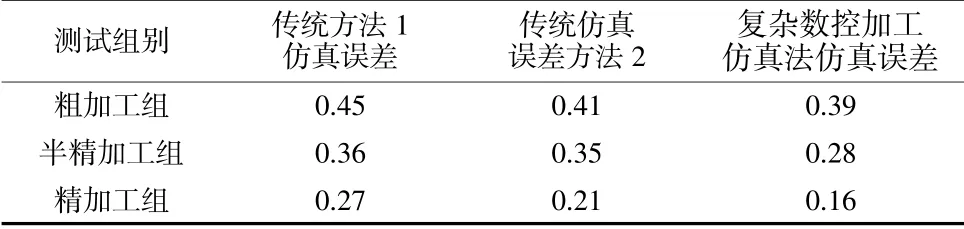
表2 數控編程及銑削加工仿真實驗結果對比分析
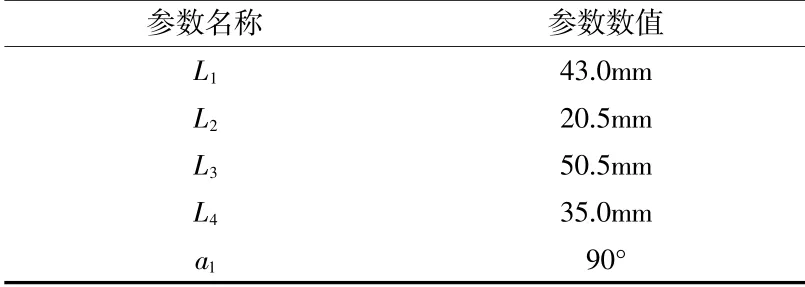
表2 優化后的四桿機構具體參數
所設計的四桿機構瞬心軌跡與膝關節轉動瞬心軌跡(表1坐標值擬合出的曲線)對比圖如圖3所示,從圖中可以看出曲線在0°~110°之間具有較好的重合度,大于110°時,兩個軌跡誤差開始變大,這為加下來的外骨骼轉動角度設計提供了重要的設計參考。
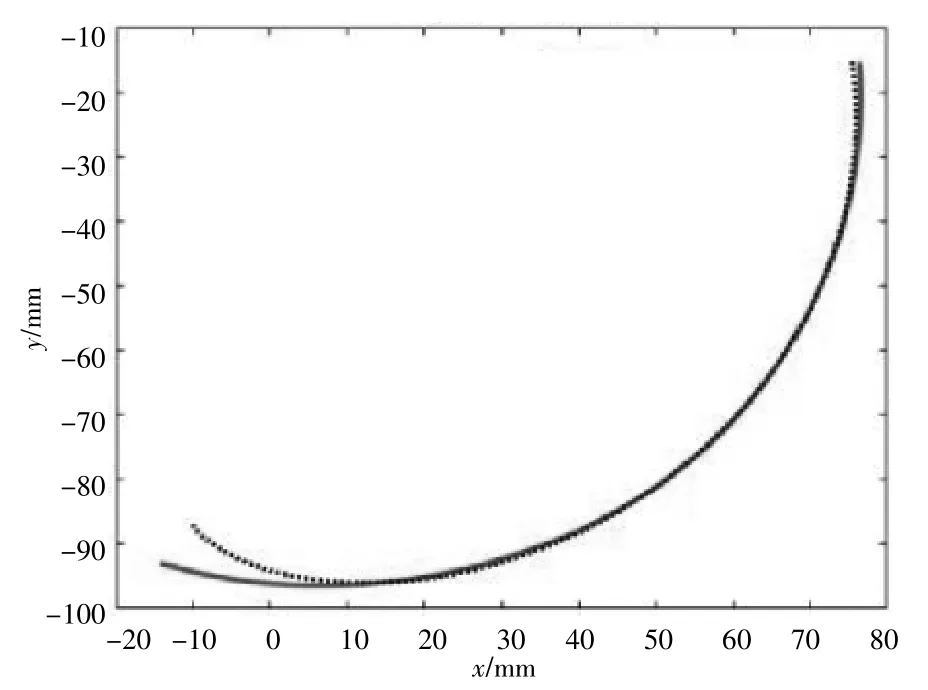
圖3 四桿機構轉動瞬心軌跡(點劃線段)與膝關節轉動瞬心軌跡(實線段)對比圖
1.3 總體結構及驅動設計
人體正常行走的步態角度范圍為0°~75°[10],所以下肢四桿膝關節設計轉動角度范圍為0°~90°。整個外骨骼可分為腰部固定模塊、大腿骨模塊及小腿骨模塊等3個部分。腰部固定模塊設有驅動裝置和數據采集裝置,大腿模塊包括大腿骨、大腿連桿、大腿綁帶以及彈性滑塊裝置,彈性滑塊裝置主要是保證系統的柔性,小腿模塊包括小腿骨、小腿綁帶以及IMU慣性傳感器,用來測量下肢的姿態。外骨骼關鍵參數見表3。
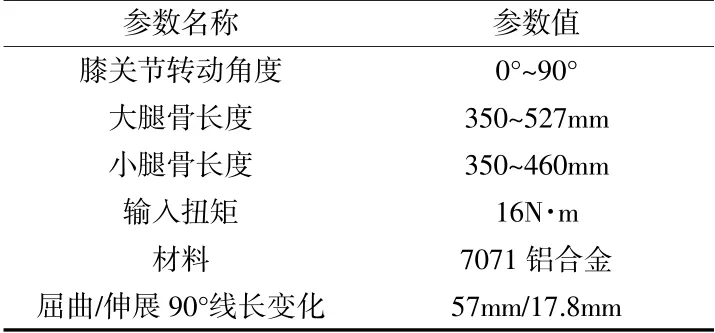
表3 下肢膝關節外骨骼參數及材料
康復外骨骼機器人常見的有電機絲杠、電機齒輪驅動、液壓驅動、氣壓驅動3種模式。電機絲杠驅動簡單容易且可傳遞大扭矩,缺點是精度難以保證。液壓驅動可實現大扭矩輸出,但驅動系統笨重且對密封要求高。氣壓驅動簡單方便,驅動源是空氣,容易獲取但精度難以保證且驅動噪音大。綜上所述,本設計的四桿膝關節外骨骼選用電機齒輪驅動,電機型號為maxon公司的EC motor EC-i40 BL,搭配減速比為156∶1的陶瓷行星齒輪減速箱以及16通道,每轉1024脈沖,分辨率為500mmk的增量編碼器,對應驅動器型號為mmc EPOS2 24/5,電機經過減速后輸出最高扭矩為16 N·m。通過鮑登線傳動,將電機與膝關節分離,安裝在腰部位置,實現系統高度集成的同時減小膝關節的重量,降低慣性力矩。
1.4 傳動設計
傳統的外骨骼傳動采用絲杠螺母或者將驅動裝置直接安裝在膝關節處,導致膝關節體積大且重量中,不方便穿戴[11]。利用鮑登線傳動[12]能夠有效解決上述問題,通過滑輪的變向,利用鮑登線可以給作用對象施加期望的動力。圖4所示是下肢四桿膝關節外骨骼的鮑登線布置情況。為了保證整體外骨骼的安全性和柔性,在大腿骨添加彈性滑塊裝置,大腿骨部分鮑登線錨點固定在下端滑塊,小腿骨部分鮑登線錨點固定在上端滑塊,兩滑塊之間添加彈簧,這樣可以有效降低外骨骼的剛度,提高外骨骼的響應速度和穿戴安全性,整體質量平衡,便于穿戴。圖4右側上方為線槽繞線凸輪,凸輪外輪廓根據屈曲鮑登線和伸展鮑登線在膝關節運動過程中的線長變化關系設計,在膝關節運動過程中,鮑登線時刻處于張緊狀態,保證傳動效率。
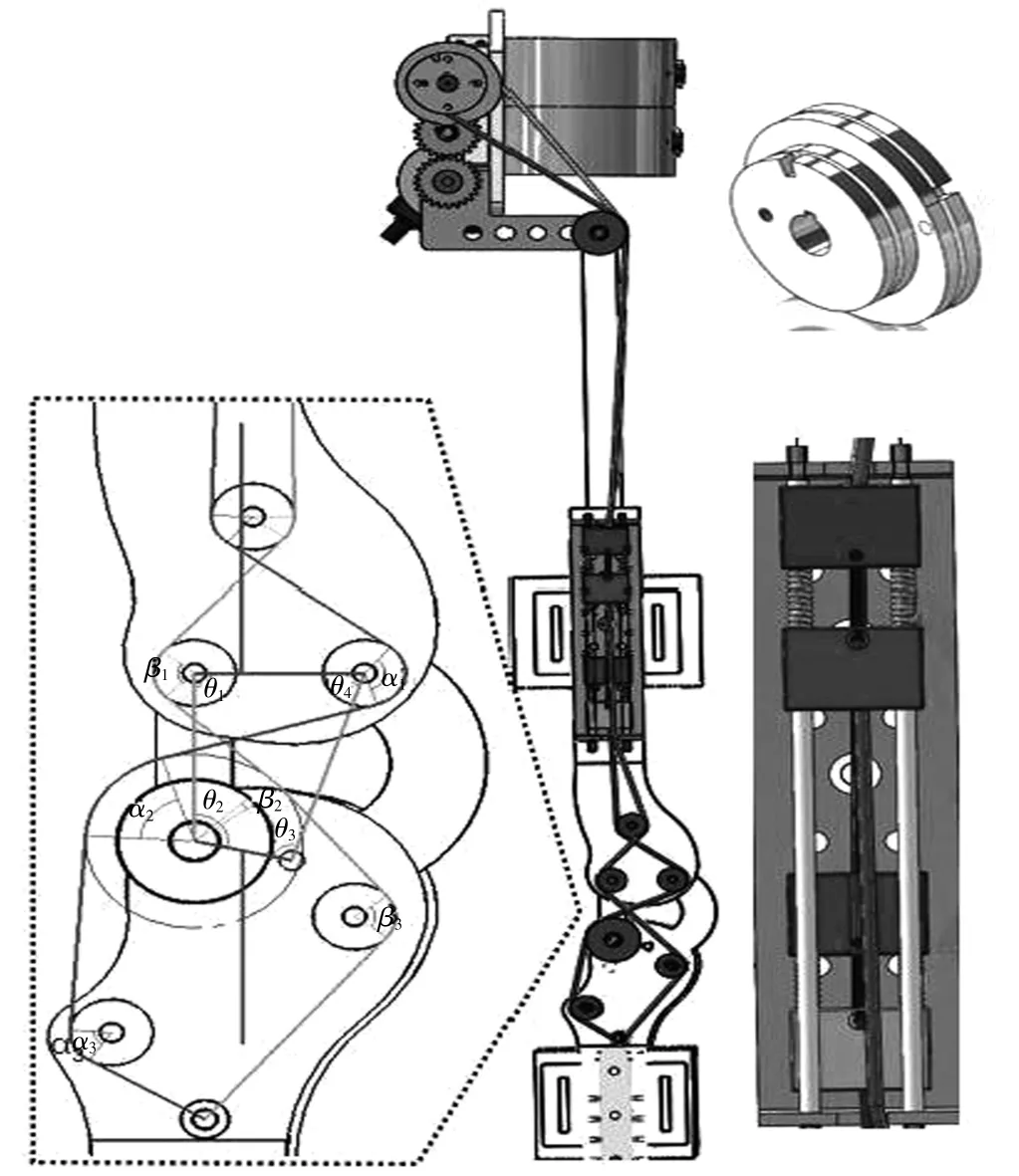
圖4 四桿膝關節鮑登線繞線方式示意圖
2 動態性能分析
對膝關節進行Adams&simulink聯合仿真,首先將外骨骼三維模型導入到adams中并進行零部件的初始化設計,包括添加材料特性及約束,驅動輸入參數以及輸出反饋參數等,使模型盡可能的貼近實際。采用位置跟蹤的抗飽和PD控制算法進行仿真分析,輸入為電機的期望位置,通過上一章節鮑登線的長度變化與膝關節轉動角度變化的映射關系可解算出膝關節轉動角度曲線,并以膝關節轉動角度作為反饋,實現整機的閉環控制。Adams和MATLAB/simulink仿真模型如圖5所示。
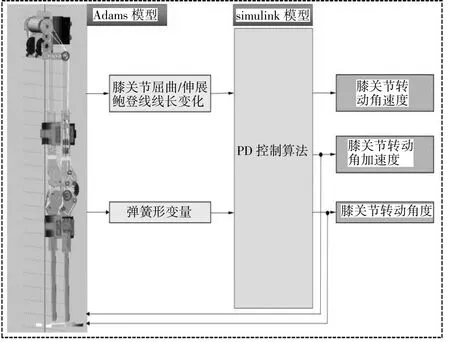
圖5 adams&simulink仿真模型
在adams導出控制系統并導入到MATLAB中,其中控制系統的輸入變量為驅動鮑登線卷繞的扭矩,作用對象為線槽凸輪,輸出變量為膝關節轉動角速度,鮑登線拉力及膝關節轉動角度。得到膝關節轉動90°過程中實際軌跡與理想軌跡,如圖6。
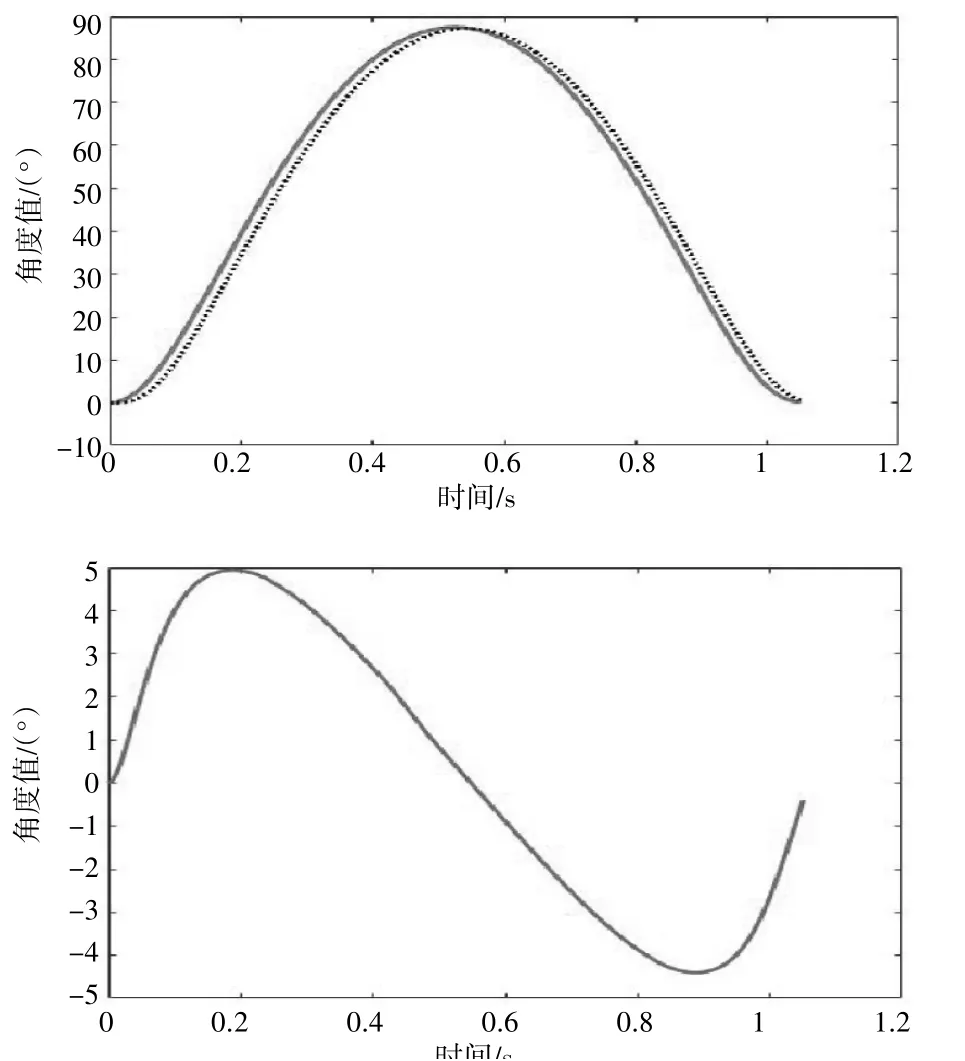
圖6 膝關節期望軌跡(實線段)及實際軌跡(點畫線段)跟隨曲線對比圖及誤差
從圖中可以看出所設計的下肢四桿膝關節外骨骼具有良好的動態跟隨特性,膝關節轉動角度軌跡跟隨誤差最大為5°,存在誤差滯后的原因一方面可能與鮑登線的線性變形及張緊有關,另一方面則與大腿骨的柔性裝置中的彈簧變形有關。對于第一個方面可以采用性能更好的鮑登線及通過施加合適的預緊力解決;第二方面則是無法避免的,只能通過優化彈簧剛度降低跟隨誤差。
3 結語
針對膝關節康復治療,提出了一款能匹配人體膝關節運動瞬心軌跡的高順應性小負載膝關節外骨骼。該設備的驅動裝置安裝在腰部模塊,利用鮑登線傳動驅動膝關節做屈曲/伸展運動,采用抗飽和的軌跡跟蹤PD控制方法對所設計的外骨骼進行Adams&Simulink聯合仿真,結果表明所設計的膝關節外骨骼具有良好的動態響應特性及良好的運動順應性,符合人體膝關節運動的時變特征。未來會在所分析的基礎上制作外骨骼實物并對外骨骼的順應性、穿戴舒適性及安全性進行實驗分析,驗證外骨骼步態與人體步態的一致性。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
藝術啟蒙(2018年7期)2018-08-23 09:14:18
特別健康(2018年2期)2018-06-29 06:13:44
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:33:14