解耦機構(gòu)研究現(xiàn)狀與分析
2022-10-21 07:18:14屈淑維郭志宏
機械傳動 2022年10期
屈淑維 郭志宏
(1 中北大學 機械工程學院, 山西 太原 030051)
(2 惡劣環(huán)境下智能裝備技術山西省重點實驗室, 山西 太原 030051)
0 引言
當今自然界生物體所呈現(xiàn)的聯(lián)結(jié)方式主要有串聯(lián)、并聯(lián)及混聯(lián)。工程學中,人類所締造的各類機械秉承了自然界萬物的聯(lián)結(jié)關系,這些聯(lián)結(jié)關系通過鉸鏈和構(gòu)件形成了開環(huán)或閉環(huán)結(jié)構(gòu);為實現(xiàn)不同的功能需求,又形成了各類串聯(lián)、并聯(lián)及混聯(lián)機構(gòu)。
串聯(lián)機構(gòu)結(jié)構(gòu)無耦合、控制容易,精度較低,被廣泛應用在工程機械領域。并聯(lián)機構(gòu)結(jié)構(gòu)緊湊、剛度大、承載能力強、累計誤差小、精度高、工作空間小,被廣泛應用于各類精密加工設備中。混聯(lián)機構(gòu)結(jié)構(gòu)龐大、構(gòu)型復雜,單模塊化功能強,多被應用于大型及巨型裝備的在線加工操作。
由于并聯(lián)、混聯(lián)機構(gòu)存在閉環(huán)結(jié)構(gòu),機構(gòu)控制困難、標定復雜、響應速度慢。而解耦機構(gòu)可簡化控制與標定,奇異位形少、工作空間大、運行精度高、能耗低,引起了學術界及產(chǎn)業(yè)界的廣泛關注,成為機構(gòu)學的研究熱點之一[1]。
本文中通過研究解耦機構(gòu)型綜合方法及流程,揭示了解耦機構(gòu)設計的關鍵技術是通過不同的驅(qū)動器實現(xiàn)獨立的位姿輸出;提出了支鏈解耦運動副軸線方向與位置的約束關系;根據(jù)支鏈輸出運動特征,分析了驅(qū)動副選擇原則;以輸出運動解耦為目標,探討了幾類運動特征轉(zhuǎn)化的設計方案;結(jié)合解耦機構(gòu)的應用領域,指出了解耦機構(gòu)的理論研究方向及應用拓展領域。
1 型綜合方法
機構(gòu)的型綜合是根據(jù)輸出運動特征進行設計,得到滿足要求機構(gòu)的過程。解耦機構(gòu)是以機構(gòu)運動與約束的變換邏輯關系為基礎,以輸出運動解耦為目標,通過輸入/輸出間獨立的拓撲結(jié)構(gòu)進行機構(gòu)構(gòu)型創(chuàng)新設計的過程。目前主要有4種理論方法。
1.1 線性變換
機構(gòu)關節(jié)空間到輸出運動空間及支鏈運動空間到機構(gòu)輸出運動空間的映射關系可表示為

式中,[v]=[vx vy vz]為動平臺輸出點H的平移速度矢量;[ω]=[ωx ωy ωz]為點H的轉(zhuǎn)動速度矢量;[A]為機構(gòu)正向雅可比矩陣;[B]為逆向雅可比矩陣;q為笛卡爾坐標系中驅(qū)動副的輸入速度。
式(1)可由線性變換表示為

式中,[J]=[A]-1[B]為全局雅可比矩陣,表示機構(gòu)輸入/輸出的變換關系。
全局雅可比矩陣J(J-1)從理論上揭示了機構(gòu)速度空間的映射關系,反映了機構(gòu)的輸入/輸出特性。當雅可比矩陣為單位矩陣時,機構(gòu)為各向同性機構(gòu);當雅可比矩陣為對角矩陣時,機構(gòu)為不耦合機構(gòu);當雅可比矩陣為三角矩陣時,機構(gòu)為解耦機構(gòu);否則為一般耦合機構(gòu)。
Gogu[2]根據(jù)雅可比矩陣對各向同性機構(gòu)、不耦合機構(gòu)及解耦機構(gòu)進行了型綜合。基于線性變化理論,Glasunov 等[3-4]根據(jù)機構(gòu)的雅可比矩陣進行了機構(gòu)優(yōu)選。雅可比矩陣從機構(gòu)輸入/輸出映射上揭示了機構(gòu)的運動特征。
1.2 基于單開鏈的約束綜合法
并聯(lián)機構(gòu)是由動、靜平臺及兩者之間的若干單開鏈(混合單開鏈)支路組成。單開鏈被視為機構(gòu)的一種結(jié)構(gòu)單元。機構(gòu)的拓撲結(jié)構(gòu)方位特征(POC)可表示為

式中,Mpa為并聯(lián)機構(gòu)的運動特征;MJi(i=1,2,…,m)表示支鏈的運動特征。
式(3)表明,機構(gòu)的運動特征是所有支鏈運動特征的交集。
機構(gòu)的拓撲結(jié)構(gòu)特征由耦合度k表示為

耦合度k揭示了多回路機構(gòu)運動學與動力學的復雜性,為并聯(lián)機構(gòu)的解耦設計提供了理論依據(jù)。沈惠平等[5-6]以此為據(jù)進行了并聯(lián)機構(gòu)的位置解耦研究。Jin等[7]依據(jù)該方法融合拓撲結(jié)構(gòu)及尺度參數(shù)對3自由度并聯(lián)機構(gòu)進行了解耦設計。
1.3 旋量理論
旋量由表達方向和位置的雙矢量構(gòu)成。通過機構(gòu)的運動旋量系與約束旋量系,支鏈的運動旋量系與約束旋量系的互易(圖1)與從屬(圖2)關系描述了機構(gòu)的綜合過程。

圖1 機構(gòu)旋量間的互易關系Fig.1 Reciprocal relation between mechanism screw

圖2 機構(gòu)旋量間的從屬關系Fig.2 Affiliation between mechanism screw
將以上互易與從屬關系用集合描述為機構(gòu)運動旋量與支鏈運動旋量及機構(gòu)約束旋量與支鏈約束旋量間的關聯(lián)關系,建立機構(gòu)輸出與支鏈輸出特征參數(shù)間的相互關系。以機構(gòu)輸出特征參數(shù)為目標依次確定支鏈的運動副配置,其型綜合過程表示為

式中,w、ζ分別為機構(gòu)輸出自由度的數(shù)量和特征;$M、分別為機構(gòu)及支鏈的運動旋量系;$r、分別為機構(gòu)及支鏈的約束旋量系。
Qu 等[8]4根據(jù)旋量理論進行了并聯(lián)解耦機構(gòu)的型綜合。張彥斌等[9]根據(jù)互易旋量理論,以分支的驅(qū)動旋量、主動旋量和可動非主動旋量間的相互關系,得到了3自由度各向同性平面并聯(lián)機構(gòu)。
1.4 GF集理論
GF集是機構(gòu)末端速度特征的一種集合,依據(jù)轉(zhuǎn)動特征與移動特征的拓撲關系,以Plücker 坐標為基礎,描述拓撲結(jié)構(gòu)關系。GF集的型綜合過程可由式(6)~式(7)表示為

式中,GF為末端速度特征,GFi表示第i(i=1,2,…,n)條支鏈的末端速度特征。

式中,F(xiàn)D為機構(gòu)末端輸出特征;N為支鏈數(shù);n為具有主動驅(qū)動的支鏈數(shù);qi為主動支鏈i上的驅(qū)動器數(shù);p為被動支鏈數(shù)。
GF集的型綜合主要依據(jù)移動特征與轉(zhuǎn)動特征間的影響規(guī)律進行拓撲結(jié)構(gòu)綜合。影響規(guī)律表現(xiàn)為:①第一類六維全集GF集與任何其他GF集求交時不改變其他GF集的特征。②移動全集與任何其他GF集求交時不改變其他GF集的移動特征。③轉(zhuǎn)動全集第二類GF與任何其他第二類GF集求交時,如果兩個第二類GF集轉(zhuǎn)動中心重合,則該轉(zhuǎn)動全集GF不改變其他集GF的轉(zhuǎn)動特征。
GF集依據(jù)機構(gòu)移動特征與轉(zhuǎn)動特征的相互影響及順序性,準確描述了機構(gòu)末端的運動能力。童幸等[10]基于GF集對3-DOF 解耦(可約)平移機構(gòu)進行了型綜合。秦友蕾等[11]根據(jù)鉸鏈軸線的遷移規(guī)律,對3R2T并聯(lián)機構(gòu)進行了解耦綜合。
上述幾種型綜合方法各有特色,為解耦機構(gòu)的型綜合提供了不同的解決途徑。對上述幾種方法特點的總結(jié)如表1所示。

表1 解耦機構(gòu)型綜合方法的分析Tab.1 Analysis of type synthesis method of decoupled mechanism

類型特點旋量理論GF集理論借助運動旋量系與約束旋量系間的對偶關系及旋量與反旋量間的互易關系。描述型綜合過程。理論描述。依據(jù)運動副軸線間的方向與位置約束關系,揭示支鏈的輸出運動規(guī)律,探索支鏈間的解耦關系。
上述幾種方法從不同角度為解耦機構(gòu)的型綜合提供了理論依據(jù)。
2 解耦機構(gòu)的型綜合方法
解耦機構(gòu)的本質(zhì)是末端的輸出運動特征能夠通過不同的驅(qū)動器控制。當動平臺的部分方位變量只是部分運動輸入變量(θ1,θ2,…,θr)(r<F)的函數(shù)時,機構(gòu)的輸入/輸出變量間存在一一對應關系,機構(gòu)完全解耦,表示為

表示三角化結(jié)構(gòu)為

解耦機構(gòu)的型綜合方法為:根據(jù)解耦機構(gòu)的輸出特征,確定支鏈特征及運動副軸線的方向及位置的約束關系;驗證機構(gòu)的自由度;輸出特性分析;若滿足解耦輸出特征,則綜合機構(gòu)為解耦機構(gòu),否則重新進行支鏈結(jié)構(gòu)解方位特征配置。具體流程如圖3所示。

圖3 解耦機構(gòu)的綜合流程Fig.3 Type synthesis procedure of decoupling mechanism
圖3 表明解耦機構(gòu)設計主要取決于3 個關鍵因素:①機構(gòu)運動輸出特征與各支鏈末端運動輸出特征的關聯(lián)關系(具有可分離自由度)。②支鏈的尺度參數(shù)(運動副軸線的幾何及位置約束關系)。③驅(qū)動副的選擇。
2.1 機構(gòu)與支鏈輸出特征關聯(lián)關系
根據(jù)并聯(lián)結(jié)構(gòu)關系,機構(gòu)部分從動件相對于機架的位置和方向只是部分驅(qū)動輸入的函數(shù)時,該機構(gòu)具有部分自由度,表示為

運動鏈拓撲結(jié)構(gòu)關系可表示為

圖4所示為自由度可分離的機構(gòu)。該機構(gòu)通過機架分離為兩個獨立運動鏈(SKC),且驅(qū)動副位于不同的SKC中,實現(xiàn)驅(qū)動與輸出的一一對應。
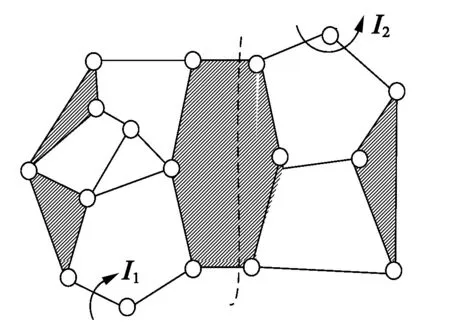
圖4 自由度可分離機構(gòu)Fig.4 Separable degree of freedom mechanism
2.2 支鏈解耦設計
支鏈解耦設計主要取決于運動副軸線間的約束關系。因此,在滿足驅(qū)動副運動特征與支鏈中其他方向運動解耦的條件下,支鏈設計應滿足以下條件:
(1)沿主動副軸線方向上,支路末端構(gòu)件的輸出必須為該支路主動輸入的函數(shù)。
(2)若末端運動特征含有兩個以上移動特征,則支鏈中的轉(zhuǎn)動副軸線必須正相交或平行;移動副的軸線必須相互垂直。
(3)若動平臺有轉(zhuǎn)動輸出要求,則所有支路的最后一個運動副應為轉(zhuǎn)動副,且軸線必須與動平臺轉(zhuǎn)動輸出軸線的方向一致。
2.3 驅(qū)動副的選擇
為了提高機構(gòu)運行過程中的穩(wěn)定性,通常所有驅(qū)動副位于同一個平臺。對預選的F個運動副為驅(qū)動副,將其剛化,得到新機構(gòu)。需滿足條件為

由于驅(qū)動副輸入運動特征往往受軸線遷移的影響,因此,驅(qū)動副的選擇應遵循以下原則[8]4:
(1)根據(jù)支鏈末端輸出參數(shù)的特征要求,依次確定支鏈中運動副類型,且1個支鏈中最多只能含有1個轉(zhuǎn)動輸入特征。
(2)若支鏈的主動輸入僅含有1個移動特征,則驅(qū)動副可為移動副、轉(zhuǎn)動副或圓柱副;若輸入運動為轉(zhuǎn)動特征,則驅(qū)動副只能為轉(zhuǎn)動副。
(3)若支鏈主動輸入運動含有兩個移動特征,第1個移動特征的驅(qū)動副只能選擇移動副。
3 運動特征的轉(zhuǎn)化方法
3.1 移動副轉(zhuǎn)化
沿某一方向的移動副可用與該方向正交的轉(zhuǎn)動副實現(xiàn)該方向的移動特征,可以改善機構(gòu)的運動學與動力學性能,易于實現(xiàn)解耦控制。
圖5 所示平行四邊形4R 機構(gòu)被定義為Pa 運動副。其相對運動存在兩個特點:①構(gòu)件A與構(gòu)件B不存在相對轉(zhuǎn)動。②增加了垂直方向的相對移動。在保持運動輸出不變條件下,用四邊形機構(gòu)替代P副,能有效改善并聯(lián)機構(gòu)的性能。文獻[12]借助該運動副特性進行了解耦機構(gòu)的型綜合。

圖5 移動副轉(zhuǎn)化Fig.5 Prismatic pair transformation
類似特征的平行四邊形機構(gòu)具有輸出構(gòu)件相對于機架的姿態(tài)保持不變的運動特征,可有效消除機構(gòu)的轉(zhuǎn)動自由度,基本類型有4R、4U、4S平行四邊形機構(gòu)。
3.2 衍生運動設計
衍生運動亦稱伴隨運動。一般情況下,轉(zhuǎn)動副往往衍生出垂直于其軸線方向的兩個平移運動。如果輸出有平移運動特征要求,則可用轉(zhuǎn)動副作為驅(qū)動副,其衍生運動可實現(xiàn)其他兩個正交方向上移動的輸出解耦。
對于有幾個獨立轉(zhuǎn)動方向輸出特征要求的機構(gòu),衍生運動的消除是設計的難點。在設計中對于僅由轉(zhuǎn)動副R 組成的單開鏈,每一構(gòu)件的桿長與軸長皆為0,即所有轉(zhuǎn)動副軸線交于一點(簡稱恒共點),該結(jié)構(gòu)不存在衍生運動[13-14],可實現(xiàn)只存在轉(zhuǎn)動要求的解耦設計,如圖6所示。

圖6 轉(zhuǎn)動副的恒共點設計Fig.6 Constant common design of rotating pair
Jin 等[15]以此為據(jù),對解耦機構(gòu)的結(jié)構(gòu)約束特征進行了研究。張帆等[16]借助該結(jié)構(gòu)設計了球面并聯(lián)解耦機構(gòu)。Li等[17]借助該結(jié)構(gòu)對[P]S 類并聯(lián)機構(gòu)進行了無伴隨運動的結(jié)構(gòu)設計。
因此,當支鏈含有兩維或三維共點轉(zhuǎn)動特征時,轉(zhuǎn)動中心的位置在移動特征的影響下會發(fā)生偏移。如圖7(a)所示,當轉(zhuǎn)動特征位于支鏈末端,支鏈末端的轉(zhuǎn)動中心隨支鏈中任一移動特征的變化而變化。此時,機構(gòu)將喪失全部或部分轉(zhuǎn)動能力。相反,圖7(b)所示轉(zhuǎn)動特征不受支鏈中移動特征的影響。因此,當運動鏈末端存在兩維或三維共點轉(zhuǎn)動特征需求時,應按轉(zhuǎn)動特征在前、移動特征在后的順序布置。

圖7 混合特征單開聯(lián)鏈解耦設計Fig.7 Hybrid characteristic single-open-chain decoupling design
4 解耦機構(gòu)的應用現(xiàn)狀
隨著機構(gòu)解耦技術的不斷發(fā)展,在工業(yè)、航天、醫(yī)療和微機械等諸多領域得到了廣泛應用。本節(jié)從應用的角度鳥瞰解耦機構(gòu)的應用研究進展,希望能有更多的學者及工業(yè)界人士關注研究解耦機構(gòu),進一步拓寬其應用的領域與空間。
4.1 解耦機構(gòu)與工業(yè)
平面解耦操作手可在大工作空間實現(xiàn)位姿的靈活變換,被用于大幅面光電產(chǎn)品的檢測及大型工件的加工操作(加工、焊接、噴涂)[18]。基于連續(xù)轉(zhuǎn)軸的2 自由度轉(zhuǎn)動機構(gòu)可用于天線定向、攝像機跟蹤、太陽能定位等2自由度轉(zhuǎn)動領域[19]。3自由度多軸并聯(lián)解耦數(shù)控機床樣機為裝備制造業(yè)提供了有力的技術支撐[20]。混聯(lián)機床運動學的解耦設計,大大提高了控制精度,使工業(yè)產(chǎn)品的合格率得到了大幅提高。全解耦3平移多維振動篩可獲得多個工況下物料顆粒的篩分,輸入、輸出具有完全解耦的并聯(lián)篩分機構(gòu),使茶葉在篩面上快速均布,有效避免茶葉堵塞篩孔,從而提高篩分效率;其振動幅度、頻率和振動自由度都能獨立調(diào)節(jié)且便于控制,可實現(xiàn)不同品種茶葉的篩分[21]。
4.2 解耦機構(gòu)與航天工程
航空航天領域中的微器件(微衛(wèi)星、微陀螺、微加速度計、微傳感器)具有結(jié)構(gòu)尺寸小、精度高等特點。振動性能、可靠性、高靈敏度性能測試是這類微器件測試領域的難題。2 自由度及3 自由度柔性解耦并聯(lián)機構(gòu),可實現(xiàn)平臺的微定位及精確定位,能夠滿足微器件的測試需求。多維柔性解耦并聯(lián)機構(gòu)則可被應用于加速傳感器的測試實驗[22]。
二維微定位自解耦裝置[23]實現(xiàn)了光刻物鏡檢測平臺的準確定位。全柔性微動全解耦并聯(lián)激振臺具有相同的振動規(guī)律與振動頻率,容易控制。2自由度轉(zhuǎn)動解耦的角度調(diào)整裝置[24]可用于改變高密度封裝中芯片姿態(tài)。彈性整體運動副[25]并聯(lián)解耦六維力傳感器無運動副的安裝間隙和偏載、結(jié)構(gòu)簡單、穩(wěn)定性好、易于制造和安裝。星球探測車通過采用補償鉸鏈解耦法可滿足其在崎嶇地形平穩(wěn)運行的能力。
4.3 解耦與醫(yī)療
近年來,面向生物工程、醫(yī)學工程的微操作解耦機器人受到國內(nèi)外學術界和工程界的廣泛關注,發(fā)展速度極快,已被應用于實現(xiàn)細胞的注射分割及微外科手術等。3T2R 并聯(lián)解耦機構(gòu)被用于外科手術的頭部支架[26]。2T2R 機構(gòu)[27]被用于外科的注射系統(tǒng)。6 自由度解耦并聯(lián)機構(gòu)[28]被用于長骨骨折的回復機構(gòu)。遠程全解耦并聯(lián)機器人被用于外科手術[29]。兩個解耦并聯(lián)機構(gòu)混聯(lián)機器人[30]可用于腹腔鏡手術,實現(xiàn)了微創(chuàng)手術操作的技能要求。Kuo 等[31]研發(fā)的解耦并聯(lián)機構(gòu)被用于腹腔手術的空間定位機構(gòu)。
5 發(fā)展趨勢
解耦機構(gòu)的型綜合過程與數(shù)學之間存在著不同層次的聯(lián)系,數(shù)學方法如圖論、集合論、矢量代數(shù)、旋量理論、李群、多項式理論、迭代法、同倫法等可直接應用于機構(gòu)學。
隨著機構(gòu)解耦技術的發(fā)展與成熟,解耦機構(gòu)已延伸到軍事、生產(chǎn)、生活、康復醫(yī)療等諸多領域。解耦設計方法由單一的技術設計向多學科的交叉與融合發(fā)展;解耦結(jié)構(gòu)由剛性向剛?cè)嵋惑w化結(jié)構(gòu)發(fā)展;應用空間由工農(nóng)業(yè)領域向航天、航空及精密領域延拓。
并聯(lián)解耦機構(gòu)在學術及應用領域引起了極大關注,尤其在解耦措施上,涌現(xiàn)出了多種方法。但目前尚未從理論高度形成系統(tǒng)化的解決方案。解耦機構(gòu)各種性能指標的定量描述與分析為解耦機構(gòu)設計及應用提供有效的技術支撐,有利于助推解耦機構(gòu)向高科技領域延伸。在工農(nóng)業(yè)及日常生活服務領域,將具有解耦特性的并聯(lián)機構(gòu)承載于機器人系統(tǒng),也將產(chǎn)生巨大的應用空間。
6 結(jié)論
(1)支鏈的解耦設計有待從數(shù)學理論高度構(gòu)建統(tǒng)一的生成原理。按照支鏈幾何約束與位置約束建立智能化的生成機理。尤其是根據(jù)轉(zhuǎn)動副軸線的幾何關系、轉(zhuǎn)動副與移動副對末端特征影響的規(guī)律,建立根據(jù)輸出運動特征進行逆向求解,獲得解耦支鏈的生成機理。
(2)解耦設計的實現(xiàn)方法體現(xiàn)了學科的交叉與融合。根據(jù)機構(gòu)的不同功能,解耦設計方法出現(xiàn)了“多元化”趨勢。因此,融合其他學科如仿生學、概念創(chuàng)新設計,將為解耦構(gòu)型提供更多的原生構(gòu)態(tài)。
(3)并聯(lián)解耦機構(gòu)已被廣泛應用于工業(yè)、醫(yī)療、航天等領域。可以預見,隨著解耦技術的發(fā)展與成熟,將進一步擴大其應用領域。同時,將其搭載于機器人系統(tǒng),將進一步拓寬其應用的空間。
猜你喜歡
數(shù)學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
世界科學技術-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
流行色(2020年1期)2020-04-28 11:16:38
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
