基于土力學(xué)原理的地下鏟運(yùn)機(jī)自主鏟裝過程力學(xué)特性分析
2022-10-26 09:26:22王振啟楊支海趙曉燕
有色設(shè)備 2022年4期
關(guān)鍵詞:礦山
方 昊, 王振啟, 楊支海, 趙曉燕, 嚴(yán) 勃
(1.北礦機(jī)電科技有限責(zé)任公司, 北京 100160; 2.紫金礦業(yè)集團(tuán)股份有限公司, 福建 上杭 364200;3.云南馳宏鋅鍺股份有限公司 會(huì)澤冶煉分公司, 云南 會(huì)澤 654211)
地下鏟運(yùn)機(jī)的自主行駛與自主鏟裝技術(shù)是實(shí)現(xiàn)智能礦山中采礦過程全自動(dòng)化的關(guān)鍵一步。如何高效穩(wěn)定實(shí)現(xiàn)礦石料堆的自主鏟裝以及快速連貫完成礦石運(yùn)輸是目前制約礦山采礦效率的兩個(gè)主要影響因素[1]。傳統(tǒng)采礦裝備工作效率低、自動(dòng)化程度低、能耗大、污染重,這些因素成為地下采礦高效綠色發(fā)展的掣肘[2]。隨著信息技術(shù)與計(jì)算機(jī)技術(shù)的飛速發(fā)展,礦山的自動(dòng)化或智能化開采在全球范圍內(nèi)逐漸投入施行。如加拿大、芬蘭與瑞典等國外傳統(tǒng)采礦大國,為獲取在采礦無人化中競爭的優(yōu)先權(quán),先后擬定了“智能化礦山”和“無人化礦山”的采礦發(fā)展規(guī)劃,其最終目標(biāo)是實(shí)現(xiàn)地下礦山生產(chǎn)全過程的無人化[3]。在地下礦山開采的工藝流程中,由于有軌車輛的靈活性差、爬坡能力低、配套設(shè)施建設(shè)成本高,使得采用有軌運(yùn)輸系統(tǒng)的地下礦山基建費(fèi)用高昂。采用無軌礦用車輛代替有軌車輛已經(jīng)成為國際地下礦山行業(yè)的發(fā)展趨勢。提高車輛的使用效率和車輛的智能化控制水平是進(jìn)一步提高礦山車輛運(yùn)輸效率的重要技術(shù)發(fā)展方向[4]。另一方面要實(shí)現(xiàn)“無人化”礦山,地下鏟運(yùn)機(jī)的自主鏟裝也是必須攻克的技術(shù)難點(diǎn)。目前地下鏟運(yùn)機(jī)已經(jīng)初步實(shí)現(xiàn)了自主行駛和自主卸料的功能,但是自主鏟裝功能還沒有實(shí)現(xiàn)。對(duì)于鏟運(yùn)機(jī)裝- 運(yùn)- 卸的三種工作屬性而言,鏟運(yùn)機(jī)并沒有達(dá)到智能化或者自動(dòng)化。因此實(shí)現(xiàn)自主鏟裝,是鏟運(yùn)機(jī)自動(dòng)化的必經(jīng)之路,是解放生產(chǎn)力的必經(jīng)之路[5]。本文以地下鏟運(yùn)機(jī)為研究對(duì)象,對(duì)自主鏟裝過程的力學(xué)特性進(jìn)行了計(jì)算分析,為后續(xù)自主鏟裝控制算法設(shè)計(jì)和自主鏟裝運(yùn)行提供理論參考和技術(shù)支持。
1 地下鏟運(yùn)機(jī)及鏟裝工作機(jī)構(gòu)
地下鏟運(yùn)機(jī)整車結(jié)構(gòu)由前車體、后車體、副車架與鏟斗工作機(jī)構(gòu)組成,其三維結(jié)構(gòu)如圖1所示。
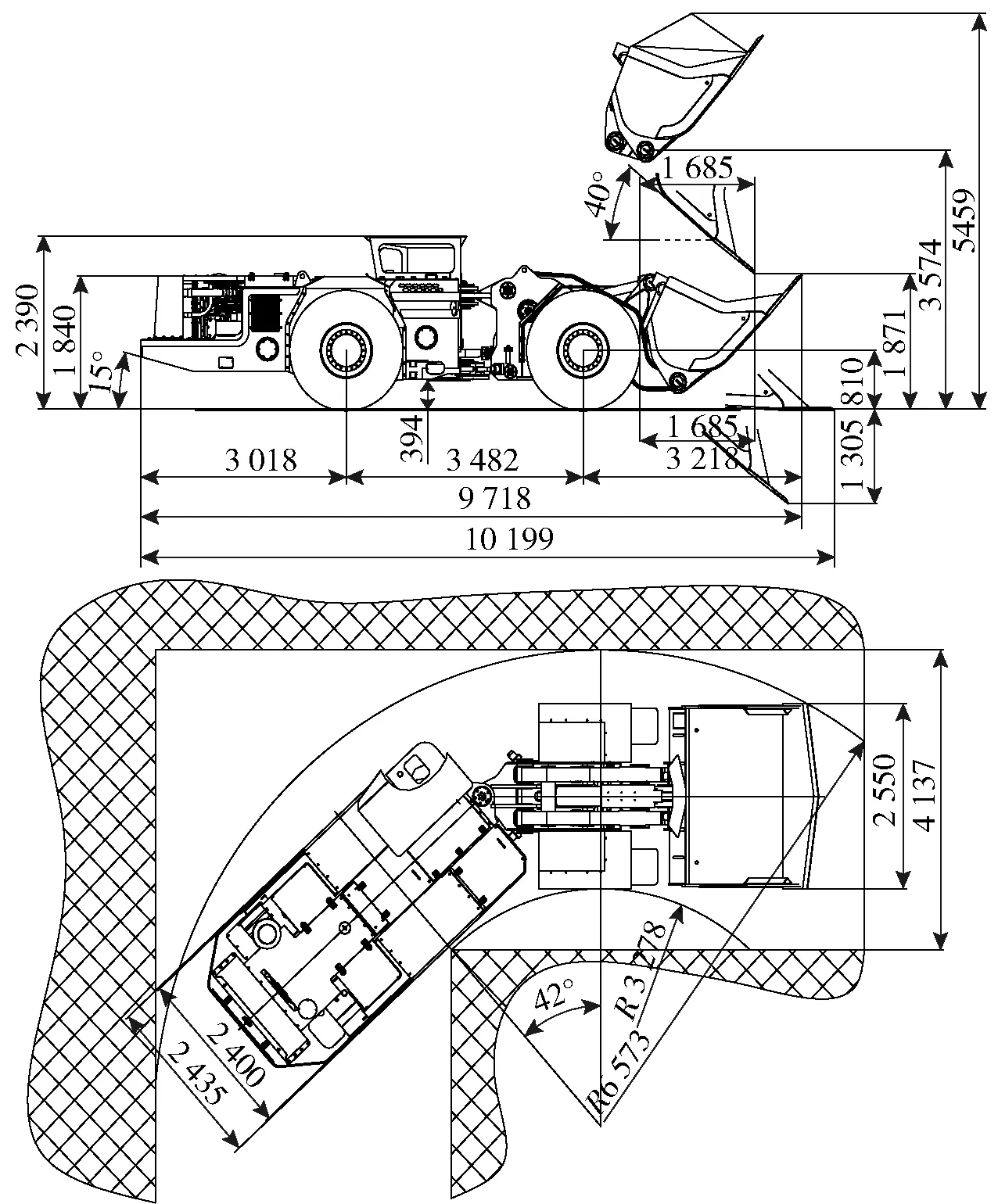
圖1 地下鏟運(yùn)機(jī)基本結(jié)構(gòu)
鏟運(yùn)機(jī)經(jīng)過多年技術(shù)研發(fā),其鏟裝工作機(jī)構(gòu)主要包括正轉(zhuǎn)四連桿工作機(jī)構(gòu)、正轉(zhuǎn)五連桿工作機(jī)構(gòu)、正轉(zhuǎn)六連桿工作機(jī)構(gòu)和反轉(zhuǎn)六連桿工作機(jī)構(gòu)[6-7]。地下鏟運(yùn)機(jī)工作裝置主要由舉升油缸、轉(zhuǎn)斗油缸、動(dòng)臂、鏟斗、搖臂、連桿以及前車架7個(gè)組件構(gòu)成。整個(gè)工作裝置連接在鏟運(yùn)機(jī)前機(jī)架上,鏟斗通過動(dòng)臂、舉升油缸連接,實(shí)現(xiàn)鏟斗的舉升和回落功能;通過連桿、搖臂與轉(zhuǎn)斗油缸連接,實(shí)現(xiàn)鏟斗的翻轉(zhuǎn)和回收功能[8]。地下鏟運(yùn)機(jī)鏟裝工作機(jī)構(gòu)如圖2所示。
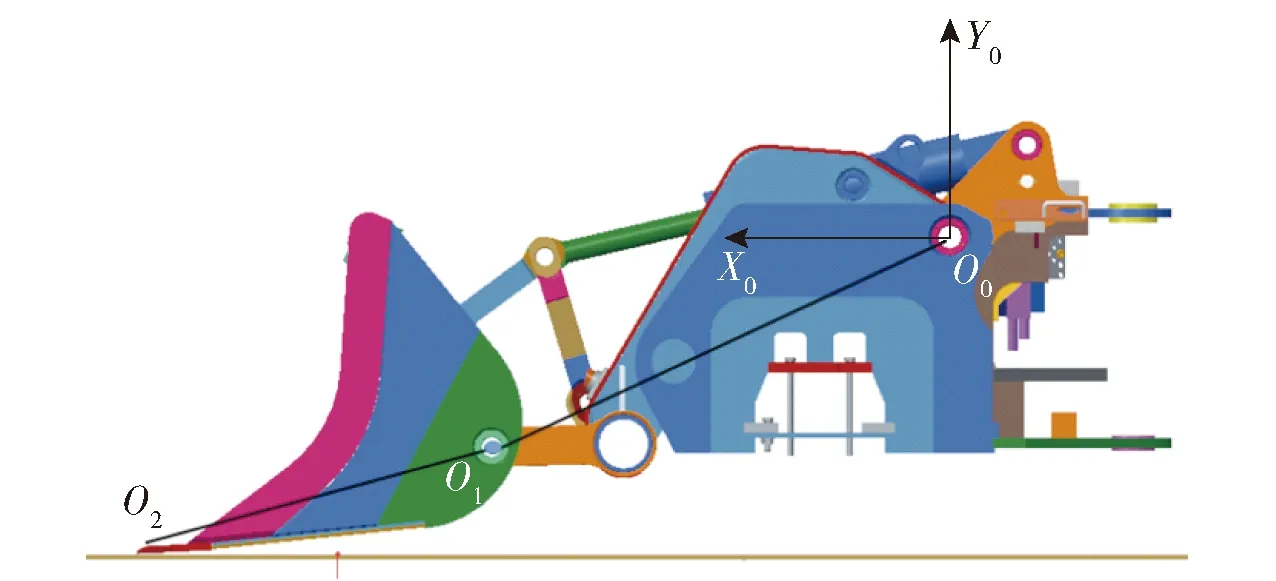
圖2 鏟運(yùn)機(jī)鏟裝工作機(jī)構(gòu)
2 鏟裝過程分析
鏟運(yùn)機(jī)的鏟裝工作過程通常可以分為四個(gè)階段:
(1)空載行駛階段
鏟運(yùn)機(jī)在卸料后,鏟斗回落、后退并轉(zhuǎn)向,然后向礦房料堆方向快速行駛,在離料堆一定距離時(shí),完成料堆掃描識(shí)別,獲取鏟裝指令,切換成低速檔并放下鏟斗;
(2)鏟裝階段
鏟運(yùn)機(jī)以全力鏟入礦石料堆,并操縱鏟斗動(dòng)臂油缸和轉(zhuǎn)斗油缸,控制鏟斗鏟裝,直至鏟斗裝滿;
(3)滿載運(yùn)行階段
鏟運(yùn)機(jī)鏟裝完畢后,車輛后退一定距離后落斗并轉(zhuǎn)向,然后向溜井或者礦用卡車方向前進(jìn);
(4)卸料階段
鏟運(yùn)機(jī)動(dòng)臂舉升到卸料位置,使鏟斗前翻卸料。
從鏟運(yùn)機(jī)的鏟裝過程可以發(fā)現(xiàn),鏟運(yùn)機(jī)的作業(yè)方式是在鏟運(yùn)機(jī)行駛過程中配合以工作裝置的動(dòng)作進(jìn)行的。當(dāng)鏟運(yùn)機(jī)處于不同的工作狀態(tài)時(shí),動(dòng)力消耗變化較大,如表1所示。
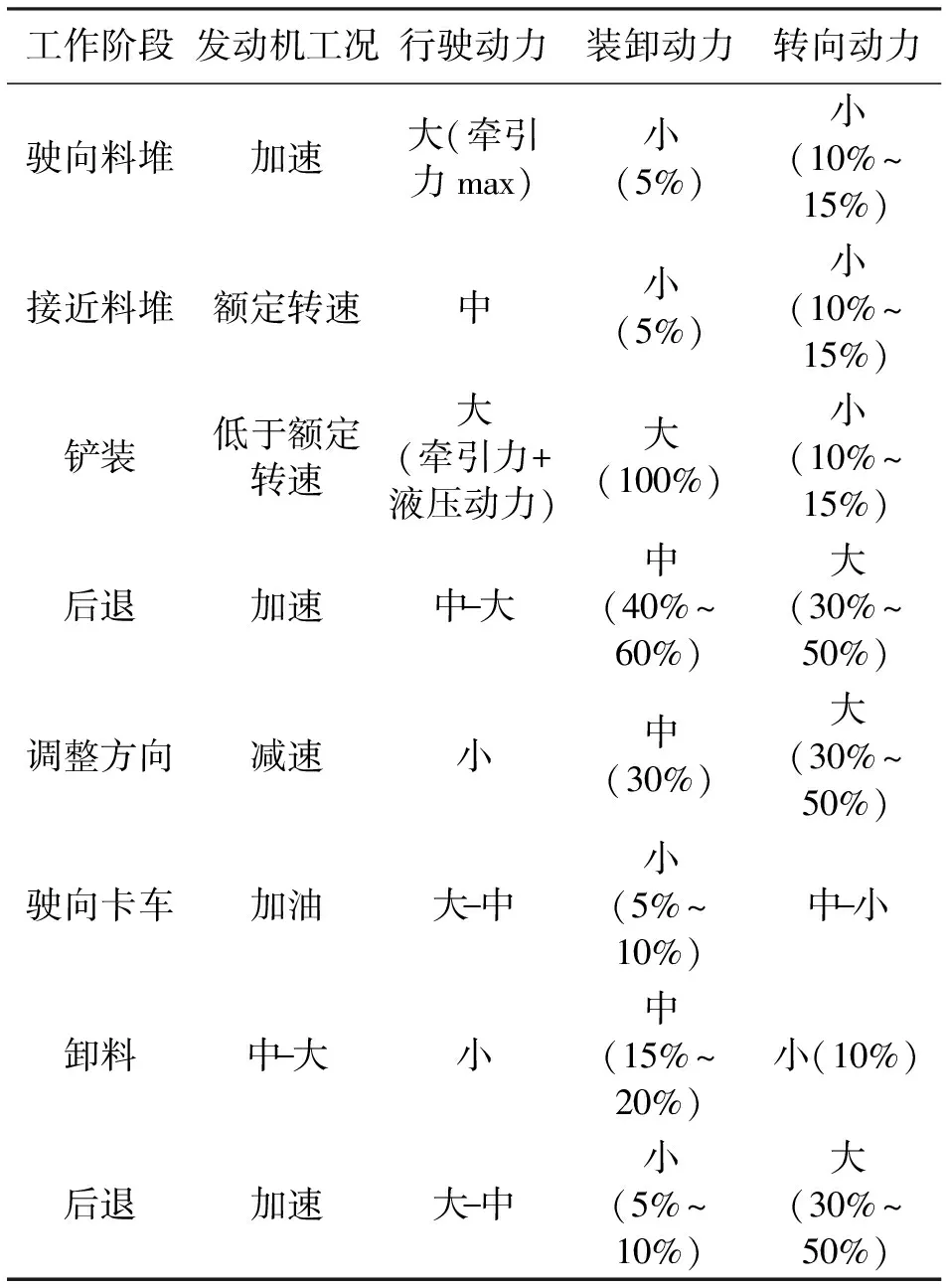
表1 鏟裝過程動(dòng)力消耗情況表
由表1可見,地下鏟運(yùn)機(jī)能耗最大的階段是鏟裝階段。由此鏟裝階段的自動(dòng)化也需要考慮鏟裝的效率與能耗。提高鏟裝效率,一般有縮短鏟裝時(shí)間和增加單次鏟裝質(zhì)量兩種途徑。對(duì)于給定鏟運(yùn)機(jī),只能通過縮短鏟裝時(shí)間來實(shí)現(xiàn)鏟裝效率的提高。即在保證滿斗率的情況下,用最短時(shí)間完成鏟裝作業(yè)。
為確保自主鏟裝操作的連貫性,鏟裝軌跡曲線應(yīng)連續(xù)且光滑。結(jié)合鏟裝工作過程,設(shè)計(jì)鏟裝軌跡曲線如圖3所示。
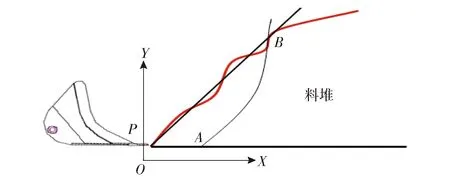
圖3 鏟裝軌跡曲線
3 鏟裝過程力學(xué)特性分析
在實(shí)際工作中,鏟裝阻力很難直接測量得到,因此,本文通過模擬計(jì)算,提出一種鏟裝阻力的估算方法。在鏟裝過程中,假定鏟裝阻力和鏟運(yùn)機(jī)的牽引力動(dòng)態(tài)平衡,利用牽引力來估算鏟裝過程的鏟裝阻力。
3.1 鏟裝阻力的理論計(jì)算
鏟裝阻力按鏟裝階段劃分可以分為插入阻力和鏟取阻力。插入阻力是鏟斗隨著鏟運(yùn)機(jī)的推進(jìn),鏟入礦石料堆的過程中受到的反作用力。鏟取阻力是鏟斗鏟入礦石料堆一定深度后,隨著兩工作油缸的提升或者翻轉(zhuǎn)動(dòng)作,料堆對(duì)鏟斗的反作用力。
對(duì)鏟裝阻力的計(jì)算的研究,開始于二十世紀(jì)八十年代,歷經(jīng)了蘇聯(lián)學(xué)者從實(shí)驗(yàn)中提煉的經(jīng)驗(yàn)公式,近代學(xué)者利用散體理論和土力學(xué)原理對(duì)鏟裝阻力進(jìn)行計(jì)算。但是這些理論分析方法都是針對(duì)松散細(xì)顆粒料堆的計(jì)算,對(duì)于大塊度的料堆,這些計(jì)算要么誤差很大,要么不適用。隨著計(jì)算機(jī)技術(shù)的發(fā)展,依據(jù)有限元法和離散元法發(fā)展出了鏟裝阻力的數(shù)值模擬計(jì)算方法,通過模擬料堆顆粒,設(shè)定顆粒屬性,形成料堆,再導(dǎo)入鏟斗模型和運(yùn)動(dòng)軌跡,完成鏟裝過程中的鏟裝阻力的仿真。這種方法不僅應(yīng)用在松散顆粒料堆,還可以應(yīng)用在大塊度料堆,比如爆破礦石。
(1) 基于蘇聯(lián)經(jīng)驗(yàn)公式對(duì)鏟裝阻力計(jì)算[9]
插入阻力的計(jì)算公式如式(1)所示:
(1)
式中PBH—總的水平插入阻力;
K1—物料粒度的影響系數(shù);
K2—物料種類的影響系數(shù);
LBH—鏟斗鏟入料堆的深度;
B—鏟斗寬度;
K3—料堆高度影響系數(shù)。
鏟取阻力主要為剪切阻力,一般而言,開始提升時(shí)刻出現(xiàn)最大鏟取阻力,隨著鏟斗的提升翻轉(zhuǎn),逐漸遠(yuǎn)離料堆,鏟取阻力逐漸減小。初始鏟取阻力可用如公式(2)計(jì)算:
PW=2.2LBHBKc
(2)
式中PW—鏟斗鏟取阻力;
LBH—鏟斗鏟入料堆的深度;
B—鏟斗寬度;
Kc—物料的剪切阻力。
基于實(shí)驗(yàn)的蘇聯(lián)經(jīng)驗(yàn)公式在進(jìn)行理論計(jì)算時(shí),其最大的不足表現(xiàn)為需要選取的系數(shù)比較多。系數(shù)多,計(jì)算時(shí)人為誤差比較大。此外,很多系數(shù)需要實(shí)際測量得到,而且因?yàn)橄禂?shù)過多,鏟裝阻力與系數(shù)的關(guān)系在鏟裝過程中難以明確的表征。
(2) 基于土力學(xué)原理的鏟裝阻力計(jì)算
鏟取階段的受力比較復(fù)雜,受力如圖4 所示。P1是礦石物料的重力,作用點(diǎn)在鏟斗內(nèi)礦石的質(zhì)心。P2是礦石料堆阻力,由鏟運(yùn)機(jī)的推進(jìn)擠壓產(chǎn)生。P3是鏟斗壁和礦石料堆的摩擦力,與運(yùn)動(dòng)方向相反。P4是鏟斗提升或翻轉(zhuǎn)引起的鏟取阻力,作用于鏟取邊緣上。P5是鏟斗與礦石料堆運(yùn)動(dòng)產(chǎn)生的慣性力[10]。
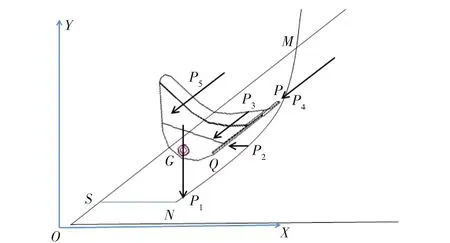
圖4 鏟取阻力受力模型
料堆輪廓曲線函數(shù)C:y-f(x)=0,鏟斗斗刃運(yùn)行軌跡曲線函數(shù)Cd:y-fd(x)=0。點(diǎn)P為鏟斗斗刃,點(diǎn)Q為斗底。下面對(duì)鏟取阻力的各分力進(jìn)行計(jì)算。
P1是鏟裝礦石物料的重力,這里根據(jù)鏟裝軌跡計(jì)算鏟裝過程中礦石的體積,然后結(jié)合礦石料堆的密度,計(jì)算物料的重力。
(3)
式中α—礦石的體積修正系數(shù);
γ—礦石料堆的重度;
B—鏟斗寬度;
XS—點(diǎn)S的X軸坐標(biāo)。
P2是料堆對(duì)鏟斗斗底的阻力,這個(gè)阻力在鏟斗斗底沒有和料堆接觸時(shí)為零。本文中假定斗刃軌跡滿足鏟斗斗底與料堆產(chǎn)生接觸的條件,并忽略個(gè)別礦石棱角對(duì)鏟斗斗底的刮蹭。
P3是鏟斗側(cè)壁與礦石料堆之間的摩擦力,這里的正壓力不僅由鏟斗內(nèi)的礦石產(chǎn)生,還由鏟斗上方的礦石料堆產(chǎn)生。本文的鏟裝過程,因鏟斗沒有徹底的鏟入礦石料堆,所以鏟斗側(cè)壁的摩擦力不考慮鏟斗其他部位的摩擦力。
(4)
式中μ—礦石的摩擦系數(shù)。
P4是斗刃與礦石料堆因擠壓形成得鏟取阻力,在鏟裝過程中,礦石在這個(gè)力的作用下與料堆分離,掉落在鏟斗中;因在鏟裝過程中隨機(jī)性很大,這個(gè)力的計(jì)算對(duì)鏟裝過程的研究作用不大,這里用剪切阻力來代替。
P4=2.2(XP-XS)BKc
(5)
P5是由于礦石在鏟裝過程中的慣性力,這個(gè)力在鏟斗與料堆發(fā)生顯著地加速運(yùn)動(dòng)時(shí)比較明顯,因?yàn)殓P裝過程是一個(gè)負(fù)載不斷增加地過程,鏟運(yùn)機(jī)在這個(gè)過程中常常使用低速檔,緩慢穩(wěn)定地鏟裝,本文的計(jì)算將P5設(shè)定為零。
經(jīng)過上述分析計(jì)算,利用如下公式,可以將各分力合成為鏟取阻力水平分力和垂直分力。
(6)
3.2 鏟裝阻力的估算方法
根據(jù)鏟裝過程中鏟運(yùn)機(jī)牽引力和鏟裝阻力水平分量的動(dòng)態(tài)平衡。考慮到鏟裝阻力并不是一個(gè)水平力,它的垂直分量會(huì)對(duì)車輛的支撐力產(chǎn)生影響,這里對(duì)文中的道路阻力進(jìn)行修正。得到如下公式
Fq=F-Fψ=F-(G+Py)(f+i)=Px
(7)
式中G—鏟運(yùn)機(jī)在鏟裝時(shí)的重力,N;
Fq—鏟運(yùn)機(jī)的牽引力,N。
對(duì)上述公式進(jìn)行變換可以得到
Px+Py(f+i)=F-G(f+i)
(8)
于是需要找到一個(gè)方法對(duì)Py進(jìn)行計(jì)算,即對(duì)鏟裝阻力的垂直分力進(jìn)行計(jì)算。本文提出兩種方法進(jìn)行估算,第一種是根據(jù)鏟運(yùn)機(jī)工作裝置的工作油缸的油壓計(jì)算鏟斗的鏟取力,認(rèn)為鏟取力的垂直分量和鏟裝阻力的垂直分量相等。這種方法的缺陷是忽略鏟裝過程中的鏟斗運(yùn)動(dòng)加速度。第二種方法是通過經(jīng)驗(yàn),總結(jié)鏟裝過程中鏟裝阻力水平分量和垂直分量的一般性數(shù)值關(guān)系,利用鏟裝阻力的水平分量代替垂直分量。
這里利用鏟運(yùn)機(jī)工作裝置的動(dòng)力學(xué)分析結(jié)果計(jì)算得到鏟斗的驅(qū)動(dòng)力Fp,這個(gè)力的垂直分力與鏟裝阻力垂直分力達(dá)到平衡,由此可以得到Py,這樣可以結(jié)合鏟運(yùn)機(jī)的牽引力計(jì)算得到鏟運(yùn)機(jī)在鏟裝過程中的鏟裝阻力的水平分力。圖4是由仿真模型得到的鏟運(yùn)機(jī)工作裝置的鏟取力。
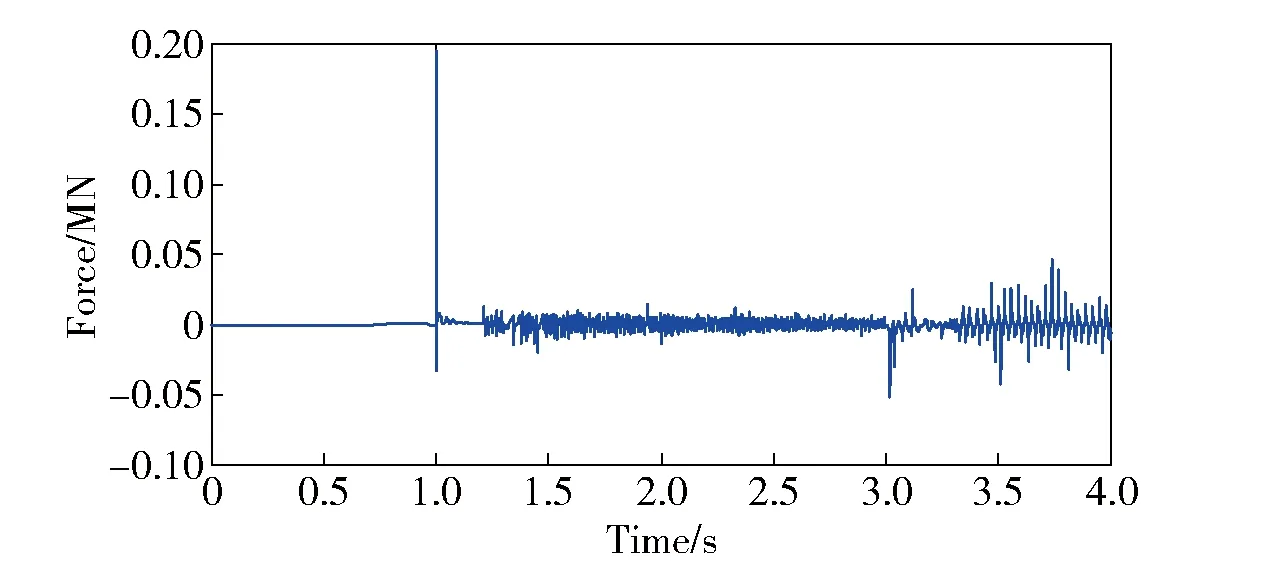
圖5 鏟裝過程鏟斗斗刃的鏟取力
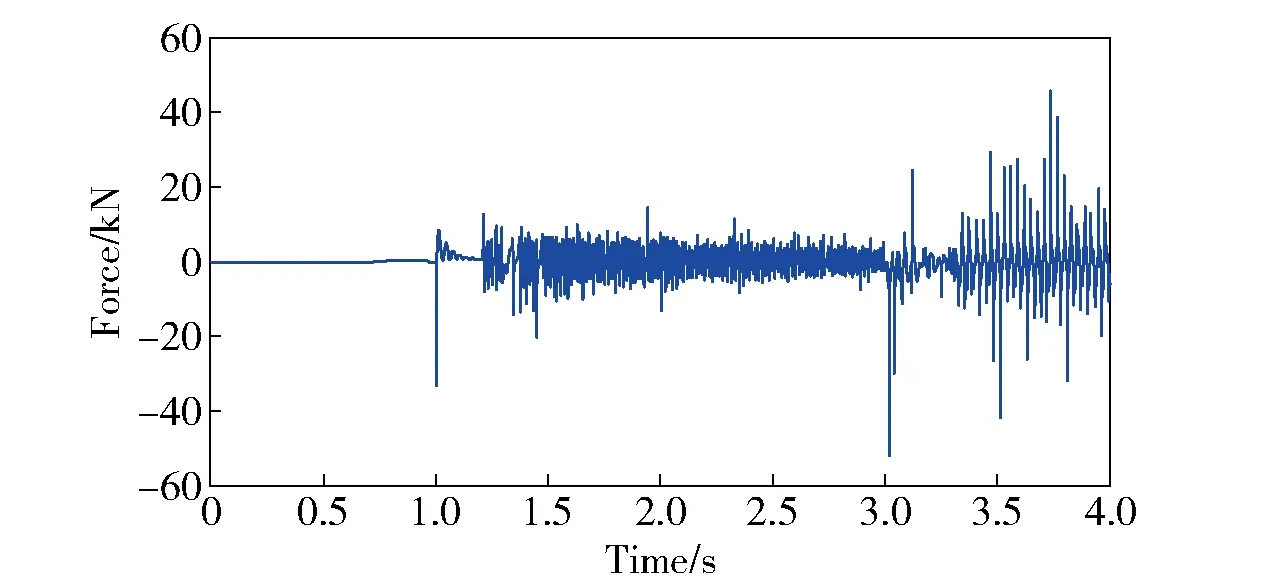
圖6 剔除突變點(diǎn)后的斗刃的鏟取力
從圖5中可以看到在無負(fù)載工況下,鏟裝插入階段與鏟取階段的分界點(diǎn),鏟取力產(chǎn)生突變激增到200 kN。這時(shí)的工況是鏟斗由平放狀態(tài)進(jìn)行翻轉(zhuǎn)和舉升狀態(tài)。這個(gè)鏟取力的激增,可能是由于鏟斗加速度方向的突變產(chǎn)生的。這里除去突變點(diǎn)的數(shù)據(jù)后,鏟取力的垂直分力如下圖6所示。從圖6中可以看出無負(fù)載工況下,鏟取力垂直分量一般在10~20 kN,在實(shí)際鏟裝時(shí)鏟取力會(huì)依據(jù)鏟裝阻力產(chǎn)生變化。
第二種方法是依據(jù)鏟裝過程中的鏟裝阻力的垂直分量和水平分量的統(tǒng)計(jì)學(xué)關(guān)系,總結(jié)出鏟裝阻力的垂直分量和水平分量的大致比例關(guān)系,αPx=Py,于是可得:
(9)
在鏟運(yùn)機(jī)工作時(shí),可根據(jù)上述公式進(jìn)行估算鏟裝阻力。
4 結(jié)論
(1)分析了地下鏟運(yùn)機(jī)及鏟裝工作機(jī)構(gòu)組成及工作原理;
(2)對(duì)鏟裝過程進(jìn)行分析,獲得了連續(xù)且光滑的鏟裝軌跡曲線;
(3)提出了一種鏟裝阻力的估算方法,基于土力學(xué)原理,建立了鏟取阻力受力模型,在鏟裝過程中,假定鏟裝阻力和鏟運(yùn)機(jī)的牽引力動(dòng)態(tài)平衡,利用牽引力來估算鏟裝過程的鏟裝阻力。
(4)為后續(xù)自主鏟裝控制算法設(shè)計(jì)和自主鏟裝運(yùn)行提供理論參考和技術(shù)支持,具有重要的工程應(yīng)用價(jià)值。
猜你喜歡
資源節(jié)約與環(huán)保(2022年8期)2022-09-20 02:24:38
現(xiàn)代礦業(yè)(2021年12期)2022-01-17 07:30:32
河北地質(zhì)(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
石材(2020年11期)2021-01-08 09:21:48
礦產(chǎn)勘查(2020年7期)2020-12-25 02:43:42
陽光(2020年6期)2020-06-01 07:48:36
當(dāng)代工人·精品C(2020年1期)2020-05-20 07:54:37
建材發(fā)展導(dǎo)向(2019年11期)2019-08-24 06:35:46
