PLC硬件結構的水電站故障監測系統及故障識別
2022-10-27 02:43:18汪廣明黃賽梟
計算機測量與控制 2022年10期
熊 璽,汪廣明,童 松,何 滔,黃賽梟
(國能大渡河沙坪發電有限公司,四川 樂山 614300)
0 引言
21世紀以來,我國水利水電事業發展迅速,水電站單機容量不斷增大。水電站的運行穩定性直接關系到電站的安全和電網的供電質量[1]。水輪機調節系統(HTGS, hydro-turbine governing system)在水電站中起著功率調節的作用,為了減少HTGS的突發事故,延長HTGS的使用壽命,許多大型水電站采用360攝像頭、智能巡檢機器人、無人機等方式對水電站中關鍵設備進行在線狀態監測,分析水電站機組的穩定運行狀態,并結合設備故障診斷技術,達到保證水電企業設備安全穩定運行的目的,從而提高水電企業的經濟效益[2-3]。
針對上述問題,文獻[4]提出了一種水電站故障智能檢測系統,從運行數據中研究了故障特征向量,并利用人工神經網絡建立了故障診斷模型,具有較好的故障診斷能力。然而該系統運算性能差,診斷時間太長。文獻[5]公開了廣義頻率響應函數作為基于HTGS參數模型的診斷方法,非線性輸出頻率響應函數(NOFRFs,nonlinear output frequency response functions)在非線性系統分析中具有良好的計算性能,有助于HTGS的故障診斷。但NOFRFs模式的識別需要多種精度,在工程實踐中難以實現。
1 總體方案設計
鑒于上述文獻技術中的優缺點,本研究采用巡檢機器人對水電站HTGS進行智能監測,機器人能夠通過自身攝像頭拍攝HTGS實時畫面,作為本文中的采集圖像數據,以巷道巡檢機器人為例的采集識別圖像如圖1所示。
圖1 巡檢機器人采集識別圖像案例
之后,得到的圖像數據要根據可編程邏輯控制器(PLC, programmable logic controller)控制器進行智能識別,圖像的識別過程為計算機算法運算處理過程。在此基礎上,本研究還構建了計算機平臺—水電站故障監測系統,其架構如圖1所示。
圖2中的系統框架可以看出,本研究通過設置不同的數據層次實現多種類型的數據診斷。首先,通過在水電站電力系統中設置巡檢機器人行動路線,通過機器人上智能攝像頭采集HTGS實時圖像數據信息,提取HTGS圖像中的故障特征。在數據傳輸過程中,通過無線傳輸的方式將HTGS中的故障數據傳遞到水電站故障監測系統,傳輸途徑通過云平臺傳遞到數據分析層進行數據分析或者計算,利用優化的DPM算法實現HTGS的故障識別。與此同時,通過映射的方式處理HTGS中的水電站故障監測系統數據類型的復雜非線性關系,通過巡檢機器人視覺識別實現電網系統中HTGS的數據信息診斷和故障位置診斷,使用戶能夠實時地得出HTGS故障診斷方案[6]。診斷后的數據信息通過遠程數據傳輸端口傳遞到數據監控層進行監控,進而實現底層數據的物聯網傳遞,用戶無需在現場即可實現底層數據的遠程監控。
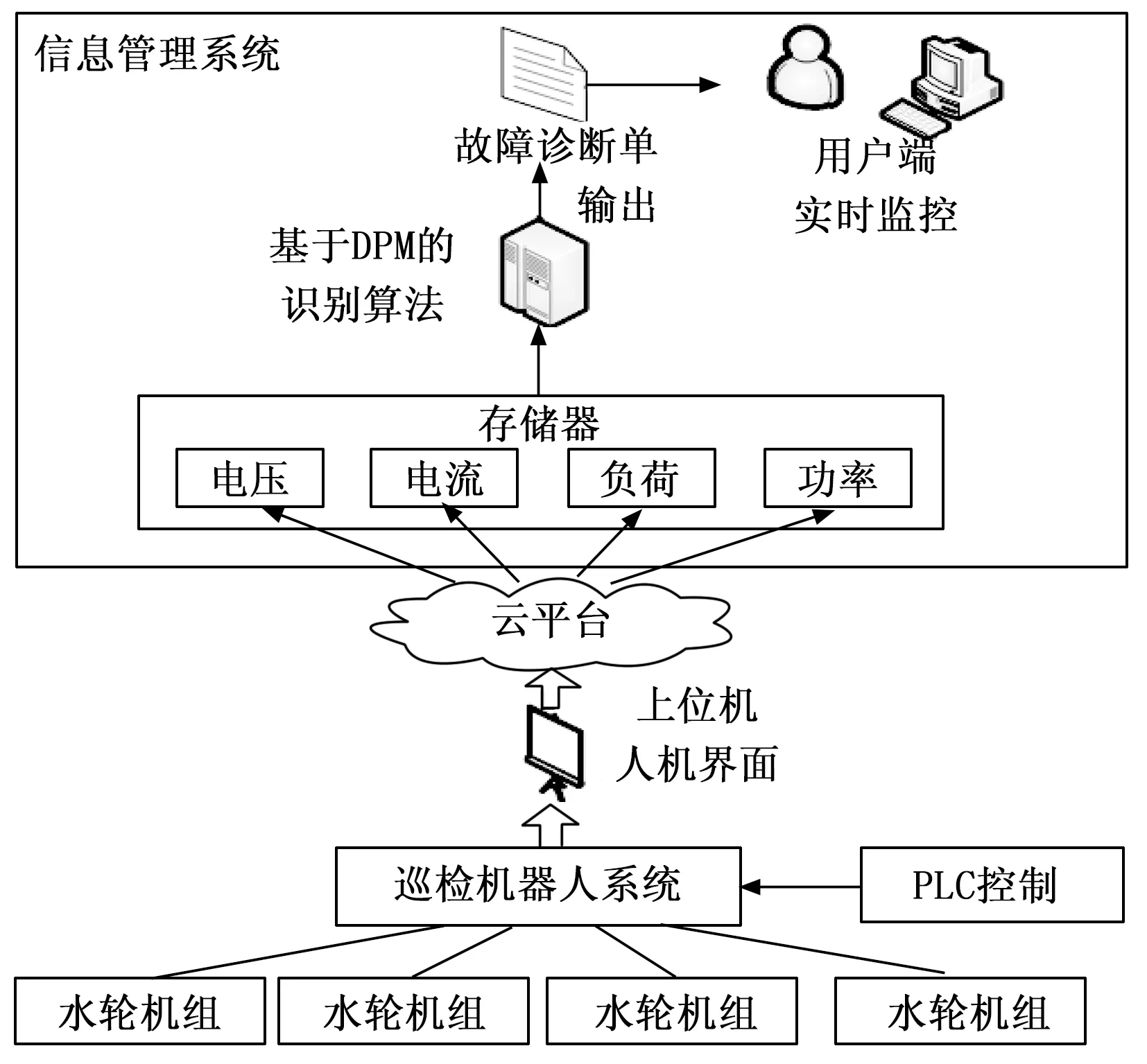
圖2 水電站故障監測系統架構
2 關鍵技術
2.1 PLC硬件結構以及控制算法
本研究采用PLC控制巡檢機器人的信息獲取,該技術可以自動控制巡檢機器人的行動路線以及故障定位,避免了人為故障診斷造成的錯誤現象。本研究采用日本廠家FX3U-64MR-ES-A型號的PLC控制器,與傳統控制方式相比,該型號PLC 控制系統有三大優點:1)PLC的控制功能編程簡單,程序語言很容易明白,方便操作;2)PLC具有很高的兼容性,能夠與普通用戶電腦直接相連;3)PLC具有遠程通訊的技術,可以接收模擬信號[7-8]。有關PLC硬件結構如圖3所示。
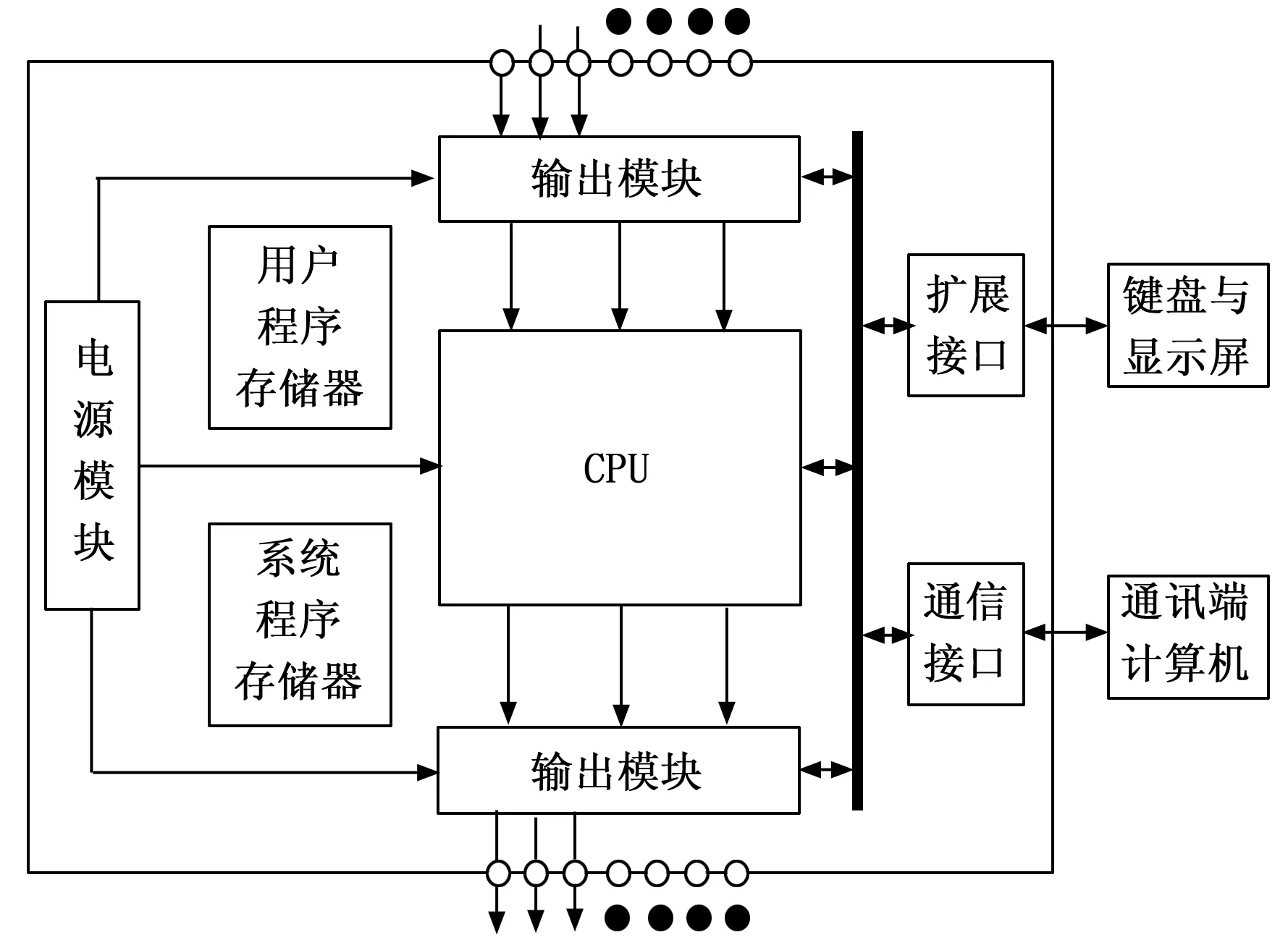
圖3 PLC硬件結構框圖
如圖3所示,PLC結構擁有電源、中央處理單元(CPU,central processing unit)、存儲器、存儲器、輸入模塊、輸出模塊、通信接口、電源模塊及擴展接口模塊等。其中,電源部分在整個PLC結構框圖中作用是十分重要的,能夠提供系統運行的電壓,保證PLC工作穩定運行;CPU對PLC整個結構進行控制指揮;存儲器把所需要的硬件軟件安全的存放,通常固化原廠系統代碼在系統存儲器中,用戶無法對只讀內存中的系統代碼進行改寫,軟件代碼的質量也決定了PLC的性能;輸入/輸出模塊則是方便接收信號和反饋信號的通道;擴展接口模塊PLC的擴展接口模塊主要負責PLC與外圍模塊之間的連接,保證了控制器與外部的有效數據通訊[9]。
PLC的工作原理并不復雜。總結歸為4個字:循環掃描。PLC的具體工作內容分為3個模塊:輸入采集、程序編程和輸出刷新。在PLC運行的時候,掃描速度由程序員設定。PLC系統會對全部輸入數據進行掃描,然后存儲起來,在掃描過程中,一定要保證收到的信號在掃描的周期內,否則將無法保存起來。此外,CPU會根據輸入/輸出模塊對其中所有HTGS故障數據進行輸出刷新,然后通過輸出端口連接到外面電路[10]。
由于PID控制算法穩定性差,本研究采用模糊控制算法,設水壓理論值為P,水壓實際測量值為P′,則誤差x為:
x=P′-P
(1)
將誤差x與誤差變化率Δx作為模糊控制算法的輸入,轉化為模糊集,并構建建立輸入變量與輸出變量之間的模糊控制規則。模糊控制表是利用模糊元函數計算出來的,存儲在PLC的存儲器中。以本研究的供水系統為基礎,將進水輪發電機組水壓誤差x、誤差變化率Δx和輸出變量v的模糊集設為QB(負大)、WA(負中)、RE(負小)、ZQ(零)、JK(正小)、HR(正中)、PL(正大),轉換成數字域(-3,-2,-1,0,1,2,3)共有7個等級[11]。關于模糊集的模糊元函數在數字域中的分布如圖4所示。
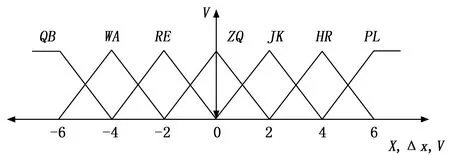
圖4 模糊元函數分布圖
通過模糊控制規則和根據模糊元函數得出模糊控制規則如表1所示。
如表1所示,可以得出模糊控制關系:如果x=A和Δx=B,則v=C。A、B、C分別代表模糊集合中任意一個元素。根據模糊控制規則表,對輸入值進行模糊控制算法轉換為數字域,得出相應的控制運算代碼結果。
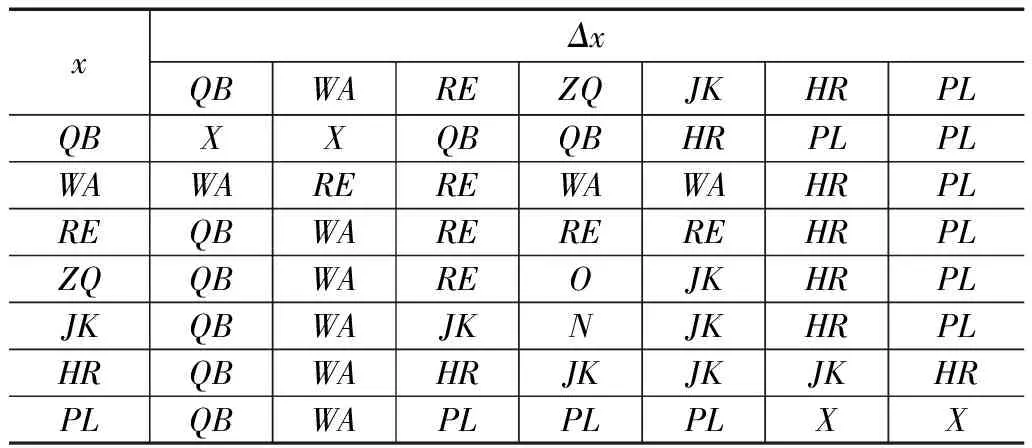
表1 模糊控制規則表
采用模糊控制算法能夠分析內部參數動態穩定性,進一步分析HTGS故障問題。但并非每臺水輪發電機組都有完整的特性曲線,因此,本研究構建簡化非線性水輪機模型,該模型因結構簡單、計算精度高而得到廣泛應用。簡化非線性水輪機模型可表示如下:
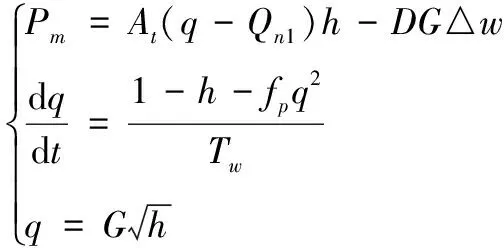
(2)
式(2)中,Pm是指水力機械功率,At是指比例系數,q是指水輪機流量,Qnl是指水輪機空載流量,D是指速度失調阻尼系數,G是指閘門開度,Tw是指水錘時間常數,fp為是指水頭損失系數,h是指水頭。考慮到HTGS中發電機的動態轉速,發電機的模型可描述為以下傳遞函數:
(3)
式(3)中,x表示水輪發電機組的頻率,TaS表示慣性時間常數,eg表示自適應控制系數。非線性水輪發電機組模型如圖5所示。
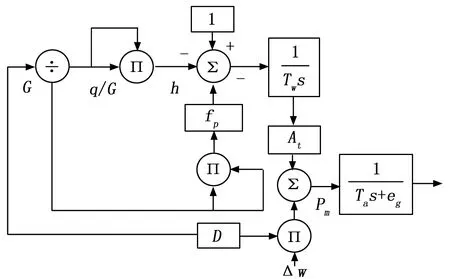
圖5 非線性水輪發電機組模型框圖
NOFRFs是頻率響應函數在非線性系統中的推廣,它能反映非線性系統的一些典型頻率響應。正常狀態下的GFRFs與非線性系統中的故障狀態不同,這種現象可用于故障診斷。n階NOFRF如下所示:
(4)
式(4)中,Y和U分別是指HTGS輸入和輸出的頻譜,σ是指HTGS的非線性函數自變量,Hn是指n階廣義頻率響應函數。當HTGS系統發生故障時,系統的非線性特性會發生變化,其反映在NOFRFs上。因此,通過NOFRFs可以反應出水電站HTGS故障問題。
2.2 優化的DPM故障識別算法
為了解決水電站HTGS圖像的故障識別困難的問題,本研究利用基于方向梯度直方圖(HOG,histograms of oriented gradients)特征模板優化的可變形組件模型(DPM, deformable part model)算法算法實現HTGS的故障識別。HOG特征是巡檢機器人視覺識別中最常用的特征模型,其提取方法的具體過程為:
步驟1:將HTGS圖像轉換為灰度圖,并進行標準化:
(5)
式(5)中,T(a,b)是指HTGS圖像的灰度值。
步驟2:梯度計算。計算HTGS圖像在像素(a,b)點的梯度值,其公式為:
La(a,b)=H(a+1,b)-H(a-1,b)
Lb(a,b)=H(a,b+1)-H(a,b-1)
(6)
式(6)中,La(a,b)是指HTGS圖像的水平梯度值,Lb(a,b)是指HTGS圖像的垂直梯度值,H(a,b)是指HTGS圖像的像素值。在像素點(a,b)的梯度向量為:
(7)
(8)
式(7)~(8)中,L(a,b)是指HTGS圖像的梯度值,α(a,b)是指HTGS圖像的梯度方向。
步驟3:構建方向梯度直方圖。將HTGS圖像分成若干模塊,每個模塊有8*8個像素,將模塊梯度方向分成9塊。對模塊中的每個像素在梯度方向直方圖中進行加權投影,就可以統計出該模塊的梯度方向直方圖[12]。將相鄰的幾個模塊進行組合,并進行歸一化。
步驟4:生成特征向量。每片歸一化模塊會有部分重疊的HOG特征,提取這些特征生成特征向量。關于HOG特征提取過程中單元格、塊以及圖像之間的關系如圖6所示。
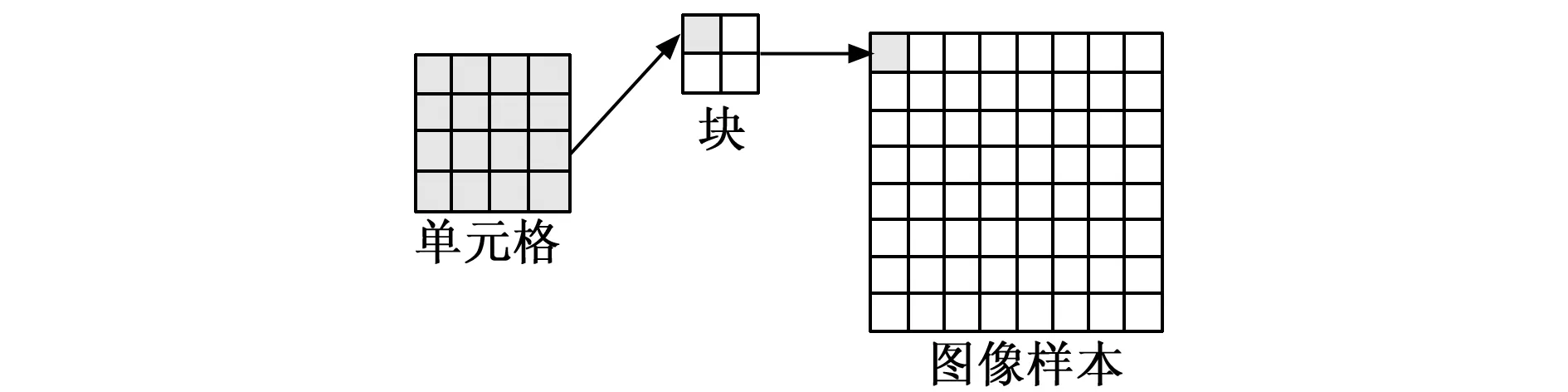
圖6 HOG特征提取過程示意圖
在得到HOG特征后,支持向量機(SVM, support vector machine,)可以最大限度地分離出HTGS圖像兩個類別特征。該分類器可以簡化分類中的問題,并能剔除許多冗余信息。假設一個線性SVM分類器為f(x),該函數的定義表達式為:
(9)
式(9)中,R是指SVM分類器一個參數,x是指一個HTGS圖像樣本變量,z是指隱變量,Z(x)是指隱變量的取值空間,P(x,z)是指HTGS圖像樣本的描述。一個SVM分類器訓練主要通過最小化目標函數得到最優參數R,具體定義為:
(10)
式(10)中,M(R)是指目標函數,i是指第i個訓練任務。關于求出目標函數最小化,可以通過固定R為每個正樣本選取最佳的隱變量值來最優化。
DPM基于HOG特征采用了模塊化的概念,并在歸一化處理時,直接將當前單元與周圍4個單元的區域歸一化。關于優化的DPM特征提取流程如圖7所示。

圖7 優化的DPM特征提取流程圖
如圖7所示,本文采用了有符號梯度和無符號梯度相結合的方式來進行DPM特征提取流程的優化,簡單原理在于分別計算有符號所有方向梯度和無符號0~180°的方向梯度,在有符號梯度方向提取18維特征向量,無符號梯度方向提取9維向量,得到的27維特征向量,對4個模塊參數進行歸一化,得到4*27=108維的HTGS特征圖像。之后重排為并進行行列相加,得到4+27=31維的特征[13]。綜上所述,下面將針對DPM模型的HTGS故障識別過程進行綜合闡述:
1)首先,將采集到的HTGS圖像通過低通濾波器,并對HTGS圖像進行切片,從而得到一系列尺寸變化的圖像。
2)與原始模板進行圖像對比,將部分模板與3倍率的HTGS圖像進行匹配,綜合部件模板與特征的匹配程度和最佳位置偏離,得到最佳的匹配結果,該過程實現公式為:
S(x0,y0,l0)=K(x0,y0)+J
(11)
(12)
式(11)~(12)中,(x0,y0)是指HTGS圖像識別特征點,l0是指尺度層,S是指匹配度,K(x0,y0)是指待監測的HTGS圖像,J是指不同部分模板與3倍率的HTGS圖像匹配度,t是指一個隨機部分模板。
3)通過低通濾波器進行響應變換,其中響應變換的公式為:
(13)
式(13)中,d是指HTGS圖像特征點偏離原始模板位置,(x,y)是指第i個部分模板在尺度層l的最佳偏離位置。(dx,dy)是指相對于第i個部分模板的偏移量。等式(13)的含義為待檢測HTGS圖像K在(x+dx,y+dy)偏移量處的匹配得分,根據匹配得分系統將智能評估出匹配結果,從而實現巡檢機器人視覺故障識別[14]。
3 實驗與分析
為了驗證水電站故障監測系統的實用性與可靠性,在這一節中,本研究將設計模擬實驗。通過巡檢機器人調研一年內安徽省蕪湖市郊外多個大型水電站水輪機設備,并搭建后臺服務器集群用于數據處理,每臺服務器的計算機操作系統為Windows10·64位,計算機的開發工具為Visual Studio 2019,OpenCV 3.0,計算機的硬件環境為CPU:Inter(R)Core(TM)i7;主頻為2.59 GHz;內存16 G,所用的編碼軟件JavaScript的版本為ECMA Script 6。
通過巡檢機器人檢出水電站多種故障圖像類型,例如:水輪機組功率不足、調速器問題、水輪機問題、油系統問題、儲氣罐壓力問題、球閥問題、接力器問題等多種問題。此外,水輪機空載流量會因導水機構泄漏、軸承潤滑不良等原因而發生變化,軸承潤滑不良的原因在于水輪機組推力瓦和鏡板之間沒有形成足夠的油膜厚度,推力瓦和鏡板沒有分離,推力瓦面得不到充分潤滑而引起的燒瓦現象,這種故障情況嚴重影響水輪機組的運行效率。本研究以軸承潤滑不良引起的推力瓦面燒瓦現象作為本研究實驗的圖像,經過一年時間調研多個大型水電站水輪機采集得到了26 864張故障圖像,經過篩選分類等預處理構建了實驗數據庫,關于巡檢機器人監測得到的圖像數據如圖8所示。
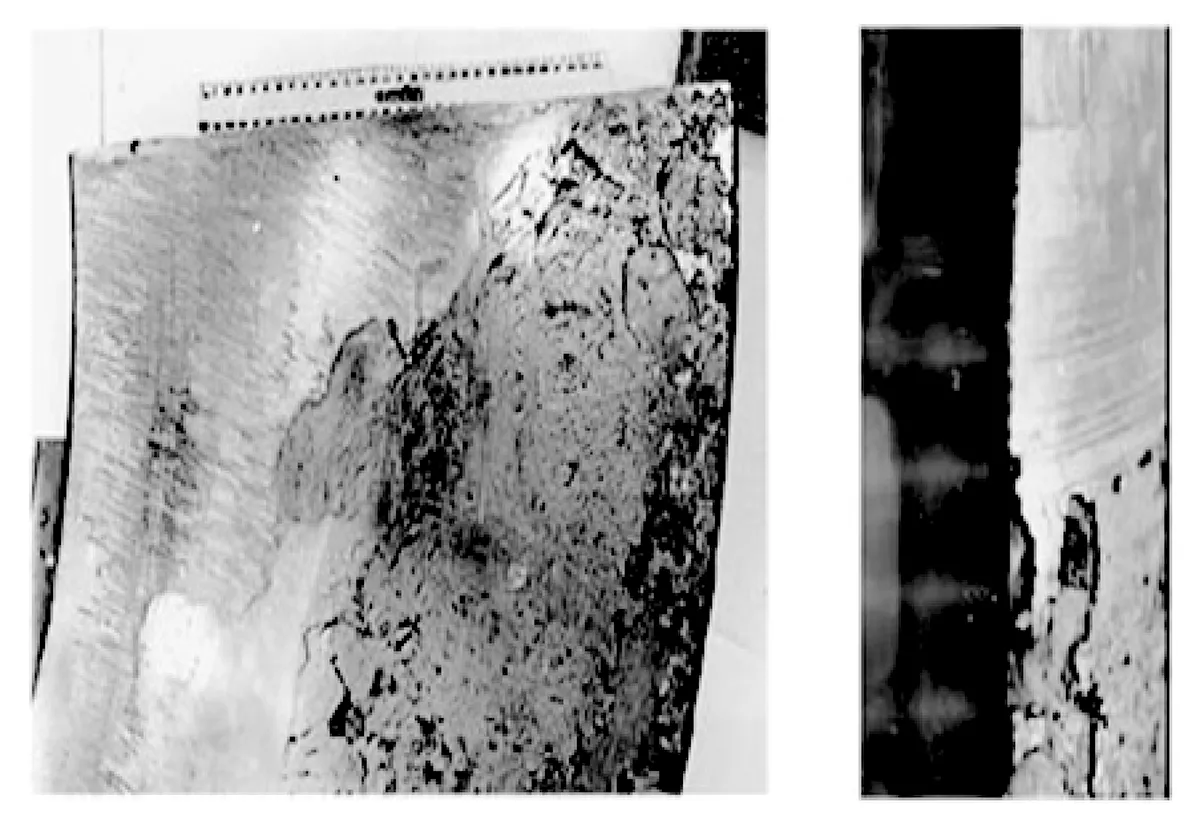
圖8 檢機器人監測得到的圖像
針對上述水電站故障問題,水輪機空載流量的非線性頻率分析對水輪機的正確檢修具有重要意義。本研究通過構建NOFRFs模型進行特性分析,其相關的主要參數根據實際HTGS設置為:Tw=0.5 s,At=1.06,Ta=5.7 s,eg=0和D=0,模擬時間為500 s,模擬步長為0.01 s。此外,主伺服電機的響應時間常數設置為Ty=0.1。干擾信號設置為xr(t)=0.05 sin(t),并在90秒時施加。為了減少計算量,將NOFRFs的最大階數N設為3,提取信號設為xu(t)=0.05 sin(t),干擾信號的基頻為wf=1/2π。不同空載流量(Qnl=0.1、Qnl=0.2、Qnl=0.3)下HTGS的NOFRF如表2所示。
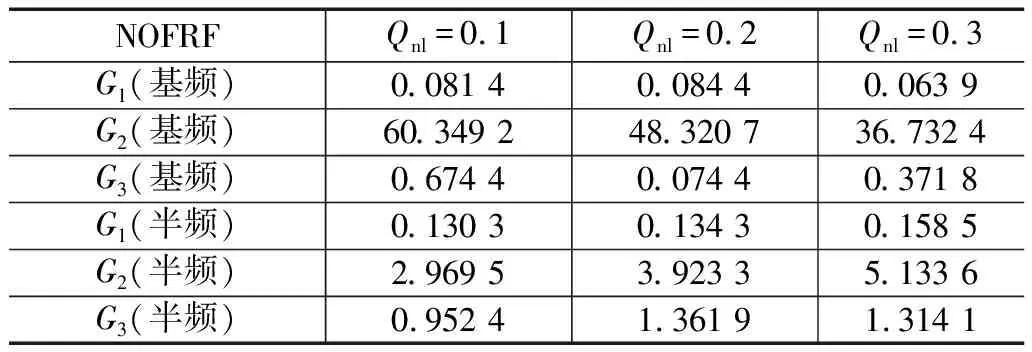
表2 不同空載流量下NOFRF值
如表2所示,隨著空載流量的增加,一些非線性特征可以從NOFRFs中反映出來。最明顯的變化是G2的半頻增加,基頻降低。G1的半頻有微弱的增加,基頻變化不大。G3的半頻會增加,G1的基頻會有較大幅度的變化。NOFRFs的這些變化可用于HTGS的故障識別,并證實了與空載流量有關。
為了突顯基于DPM的故障識別算法的優勢性能,以文獻[4]中基于人工神經網絡(ANN,artificial neural network)的故障監測模型作為比較對象,進行對比實驗。從實驗數據集中提取0~2 GB的水輪機組故障圖像數據量,采用ANN與DPM兩種算法的故障診斷系統處理這些故障圖像數據,統計不同系統的延遲時間,根據數據量大小和延遲時間為軸繪制曲線如圖9所示。
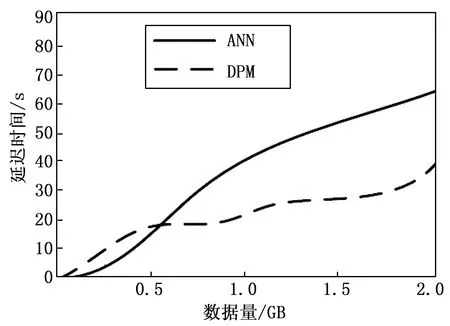
圖9 兩種系統的延遲時間對比
從圖9中可知,本研究所開發的DPM算法處理HTGS數據耗時更短,效率更高,這是因為DPM基于HOG特征采用了模塊化的概念,并在歸一化處理時,直接將當前單元與周圍4個單元的區域歸一化,采用這種優化策略提高了巡檢機器人視覺識別的效率,充分驗證了本研究水電站故障監測系統的實用性與可靠性。
4 結束語
為了達到水電站設備安全穩定運行的目的,從而提高水電行業的經濟效益,本研究構建了水電站故障監測系統,其主要內容有:
1)基于巡檢機器人視覺對水電站中HTGS進行故障識別,采用PLC控制巡檢機器人的信息獲取,該技術可以自動控制巡檢機器人的行動路線以及故障定位,避免了人為故障診斷造成的錯誤現象。
2)通過模糊控制算法提高了巡檢機器人識別穩定性,并采用一種非線性輸出頻率響應函數分析HTGS參數,有助于辨識HTGS故障問題。
3)采用基于HOG特征模板優化的DPM算法,結合SVM分類器最大限度地分離出HTGS圖像兩個類別特征,實現HTGS圖像的視覺故障識別。
經過實驗驗證了該系統的可行性,總結該研究成果,發現在HTGS特征點的分類方面仍具有較大的分類問題,導致了徐建機器人識別精度較低,未來將會進行這方面的探討與改進。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
