仿尺蠖多模式爬壁機器人設(shè)計與控制方法研究
2022-10-27 02:44:04徐林森周瑞吉劉進福
計算機測量與控制 2022年10期
眭 翔,徐林森,周瑞吉,劉進福,龍 杰
(1.常州信息職業(yè)技術(shù)學院 常州市高端制造裝備智能化技術(shù)重點實驗室,江蘇 常州 213164;2.中國科學院 合肥物質(zhì)科學研究院,合肥 230032;3.中國科學技術(shù)大學,合肥 230026;4.河海大學 機電工程學院,江蘇 常州 213022;5.常州工業(yè)職業(yè)技術(shù)學院 智能控制學院,江蘇 常州 213164)
0 引言
目前對于高層建筑清潔與檢測、大型化工罐體焊接與檢測、管道和隧道等狹小空間安全巡檢等場合,傳統(tǒng)條件下一般由人工作業(yè)來完成,有時在一些惡劣、狹小環(huán)境人工操作也很困難,不僅效率低下,而且經(jīng)常發(fā)生安全事故,每年因為檢測不到位或意外事故產(chǎn)生了大量的損失,因此爬壁機器人成為機器人研究領(lǐng)域的熱門課題,眾多國內(nèi)外學者對爬壁機器人進行了相關(guān)研究。在文獻[1]中,國內(nèi)哈爾濱工業(yè)大學學者研究了多種結(jié)構(gòu)的爬壁機器人,但是主要是以導磁性材料為核心,只能適應(yīng)導磁性壁面。文獻[2]中廣東工業(yè)大學學者研發(fā)了一種雙足爬壁機器人W-Climb,屬于足式機器人,運動能力較為靈活,但是爬行方式單一,只能吸盤吸附行走。國外學者研究更早,文獻[3]中斯坦福大學研究者采用金屬鉤刺設(shè)計了一種可以依附于墻面的仿生裝置,質(zhì)量很輕,負載能力偏弱。文獻[4]中以色列學者結(jié)合足式機器人及螳螂足底附著機理,設(shè)計了四足式仿生機器人,僅依靠貼合懸掛的方式附著與墻面。上述研究表明,目前國內(nèi)外爬壁機器人的研究雖然已經(jīng)有些成果,但是仍處于功能單一、結(jié)構(gòu)簡單的狀態(tài),缺乏一定的可靠性,存在較大的優(yōu)化空間。
尺蠖結(jié)構(gòu)簡單、體型小巧、運動迅速,本研究基于自然界尺蠖類生物的壁面攀爬機理[5-7],結(jié)合仿生技術(shù),研發(fā)了一種仿尺蠖多模式爬壁機器人,該機器人屬于一種仿生多連桿關(guān)節(jié)機器人,其關(guān)節(jié)采用具有扭矩控制功能的伺服電機。結(jié)合實際應(yīng)用場景,構(gòu)建了運動學模型,對機器人采用進行基于關(guān)節(jié)扭矩的力控方式,探索了基于極坐標理論的機器人步態(tài)控制方法,并在實際樣機平臺進行了測試,驗證了爬壁機器人的運動學模型的正確性和步態(tài)控制方法的平穩(wěn)性。
1 仿尺蠖多模式爬壁機器人設(shè)計
尺蠖是一種節(jié)肢類生物,在附著時它可以利用頭部和尾部的微小倒刺結(jié)構(gòu)實現(xiàn)對物體表面的抓附,在運動時身體通過不斷的伸展和收縮來實現(xiàn)前進和后退,結(jié)合尺蠖的運動規(guī)律[8],簡化其運動模式,本研究設(shè)計了多模式的仿尺蠖爬壁機器人。
仿尺蠖爬壁機器人虛擬樣機如圖1所示,尺蠖機器人是一種多連桿的雙足機器人,為了增加其負載能力,沒有選擇一些學者經(jīng)常采用的軟體材料或者記憶合金材料[9-10],而采用在兩個足部之間由一個三自由度機械臂連接的方案。每條大臂長10 cm,總長75 cm,采用鋁合金制作,在機械臂上安裝了3個配有高精度絕對編碼器的伺服電機,每個電機扭矩20 N·m,通過CAN協(xié)議實現(xiàn)精確的位置和扭矩控制。
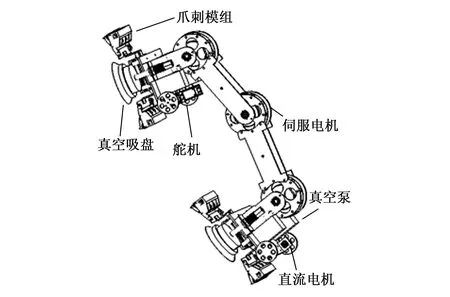
圖1 仿尺蠖多模式爬壁機器人虛擬樣機
仿尺蠖爬壁機器人可以實現(xiàn)多模式運動,其中攀爬模式是重要功能,為了實現(xiàn)附著功能,爬壁機器人足部設(shè)計了兩種附著機構(gòu)[11-12],分別是真空負壓吸附和仿生爪刺抓附兩個功能模塊。真空負壓吸附模塊在每個足部安裝了兩個真空吸盤,通過真空泵抽真空來提供附著力。仿生爪刺附著裝置由兩對爪刺模組構(gòu)成,如圖2所示,爪刺模組安裝在足底部,每只足包含一對爪刺模塊,每一個模塊由多個爪刺足片組成,每對爪刺模塊的抓附由通過安裝在底部的高扭矩舵機控制,舵機可以針對不同的壁面控制張合的大小,以此實現(xiàn)抓附力度的控制。通過這兩個吸附裝置的配合,可以實現(xiàn)在平整表面和粗糙壁面等多種環(huán)境下的有效吸附。
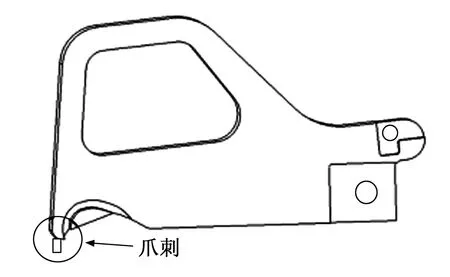
圖2 爪刺足片
爬壁機器人除了可以利用兩種附著裝置實現(xiàn)多種壁面的攀爬,同時為了解決水平面到垂直壁面過渡的問題,機器人安裝了四個直流電機,可以在地面上行走,提高了機器人多種類型壁面的適應(yīng)性,實現(xiàn)了多模式的運動功能。
2 仿尺蠖多模式爬壁機器人運動學建模
2.1 多模式爬壁機器人坐標系
當機器人做爬壁運動時,通過兩足的不斷交替吸附以實現(xiàn)循環(huán)攀附,同時身體關(guān)節(jié)不斷伸展和收縮以實現(xiàn)上下運動[13]。對于這兩種運動,建立如圖3所示的坐標系,圖中以攀爬時伸展姿態(tài)建立坐標系。機器人的一只足命名為OA,與墻面保持固定的OA為基座標,此處簡化模型,選擇以機器人三個關(guān)節(jié)分別命名為OA0,OA1,OA2,四個連桿的長度分別為L0,L1,L2,L3。定義連桿L0為機器人的基座標系{0},關(guān)節(jié)OA0為坐標系{1},關(guān)節(jié)OA1為坐標系{2},關(guān)節(jié)OA2為坐標系{3}。
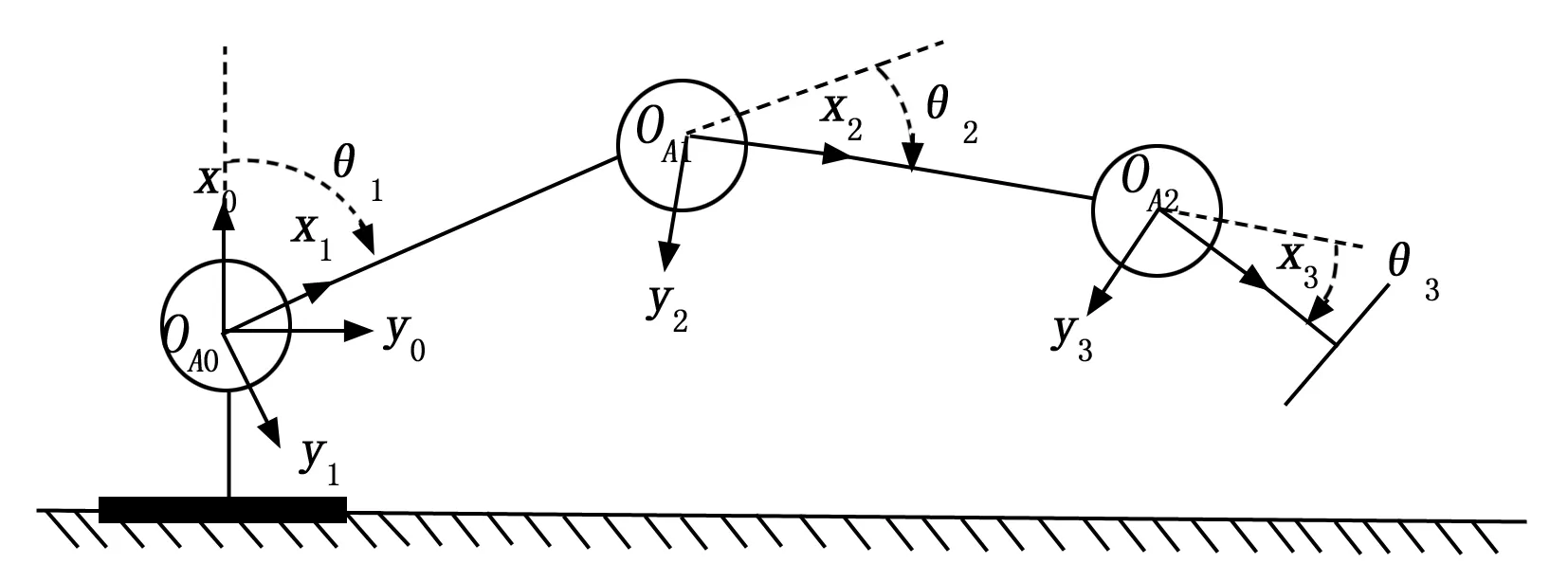
圖3 多模式爬壁機器人坐標系
2.2 多模式爬壁機器人運動學正解
本研究采用D-H參數(shù)法建立機器人運動學模型[14-15],如表1所示,定義各個關(guān)節(jié)軸心線為i,表中αi-1為軸心線i-1與軸心線i的夾角,αi-1為軸心線i-1與軸心線i的距離,即為連桿的長度,θi是指各個關(guān)節(jié)的角度,di則表示為軸心線i-1與軸心線i的垂直距離,對于相互平行的軸心線來說,該值一般為0。
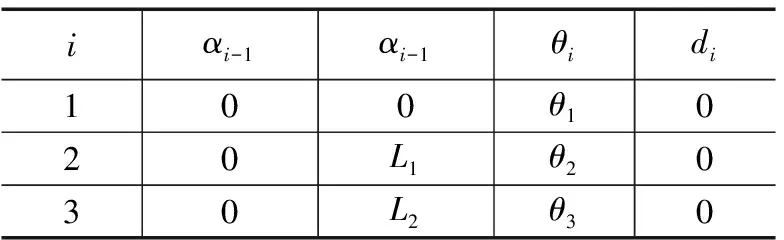
表1 仿尺蠖多模式爬壁機器人D-H參數(shù)表
將坐標系{i}經(jīng)過變換使其與{i-1}重合,則坐標系{i}到坐標系{i-1}的變換矩陣為:
即:
(1)
式中,c1表示的是cos(θi),si則表示sin(θi),以及下文出現(xiàn)的cij和sij分別為cos(θi+θj)和sin(θi+θj)。
當i分別為1、2、3時,得到連桿i相對于基坐標的變換陣如下:
(4)
將以上矩陣依次相乘,得到機器人末端位姿在笛卡爾坐標系中的矩陣:
(5)
將式(2)~(4)代入式(5)中獲得末端關(guān)節(jié)坐標系OA2在基坐標系OA0中的位姿描述矩陣:
(6)
式中,cijk和sijk分別表示cos(θi+θj+θk)和sin(θi+θj+θk),(px,py,pz)為機器人末端關(guān)節(jié)坐標系在笛卡爾空間下的坐標位置,?爬壁機器人末端執(zhí)行器的姿態(tài)。
2.3 多模式爬壁機器人運動學逆解
在仿尺蠖爬壁機器人實際應(yīng)用中,經(jīng)常需要運動到目標位置,即需要將已知的笛卡爾空間坐標轉(zhuǎn)換成關(guān)節(jié)空間位置,該機器人的運動學逆解方法如下[16-17],首先建立運動學方程組:
(7)
對式(7)中的式(1)和(2)左右平方和相加得:
(8)
以此分別求得:
(9)
(10)
由雙變量正反切公式計算得到:
θ2=Atan2(sin(θ2),cos(θ2))
(11)
由機械結(jié)構(gòu)限制和約束條件得到唯一解:
(12)
結(jié)合式(7)和(12)可以解算出θ1的值。為此改寫式(7)為:
(13)
式中,
(14)
假設(shè):
(15)
γ=Atan2(k2,k1)
(16)
則有:
(17)
代入式(13)得:
(18)
因此可以得到:
(19)
故:
(20)
θ1=Atan2(py,px)-Atan2(k2,k1)
(21)
?=θ1+θ2+θ3=Atan2(s?,c?)
(22)
θ3=?-θ1-θ2
(23)
綜上可得運動學逆解方程如下:
(24)
獲得爬壁機器人運動學逆解后,可以根據(jù)笛卡爾坐標系空間位置解算爬壁機器人各關(guān)節(jié)角度信息,通過控制器及編碼器數(shù)值可以進行角度閉環(huán)控制,從而實現(xiàn)爬壁機器人的靈活運動。
3 仿尺蠖多模式爬壁機器人步態(tài)控制
仿尺蠖多模式爬壁機器人可以實現(xiàn)地面—壁面過渡、壁面攀爬、壁面—天花板過渡三種狀態(tài)的運動[18],其中壁面攀爬為重要功能,本文重點分析。尺蠖通過不斷循環(huán)完成軀體的伸展姿態(tài)和收縮姿態(tài),實現(xiàn)上下運動,同時雙足配合在墻壁上交替抓附來完成自身的吸附脫附等動作。參考自然界尺蠖生物的攀爬原理和運動機理來設(shè)計一種高效穩(wěn)定的步態(tài)控制方案,本文將這種步態(tài)稱為尺蠖步態(tài),需要控制3個關(guān)節(jié)實現(xiàn)爬壁機器人的尺蠖步態(tài)控制。仿尺蠖爬壁機器人攀爬狀態(tài)如圖4所示,機器人在攀爬過程中有伸展、收縮、駐留3種姿態(tài)。
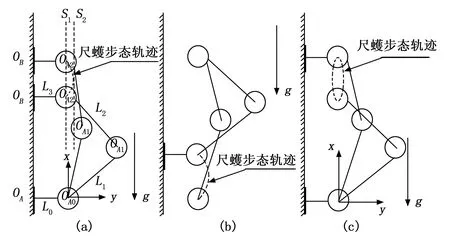
圖4 仿尺蠖多模式爬壁機器人攀爬運動模式
當機器人雙足吸附在墻面時,即為駐留狀態(tài),兩只腳都依靠真空吸盤吸附,當準備向上攀爬時,機器人首先脫附上足OB,機器人通過三個伺服電機協(xié)同工作,使機器人運動到伸展狀態(tài),并且保持足底與墻面保持平行且留有安全距離,避免發(fā)生碰撞。如圖4(a)所示,當機器人從初始狀態(tài)向上達到伸展狀態(tài)時,機器人的關(guān)節(jié)OA2的具體運動路徑如圖中的虛線所示,且過程中避免角度過大,導致機器人發(fā)生后仰傾覆,即虛線S1和S2間距最小。當完成伸展動作后,爬壁機器人下足需要進行收縮運動,如圖4(b)所示,其下足進行向上運動,虛線為機器人下足的關(guān)節(jié)運動軌跡,完成后雙足吸附在墻面,進行駐留,機器人不停實現(xiàn)伸展—收縮—駐留循環(huán)動作就可以實現(xiàn)攀爬運動。
從圖4(c)中可以看出上足關(guān)節(jié)OA2的運動軌跡如圖中虛線,為一個類似右邊半個橢圓的軌跡。基于這個半橢圓,補足另外半個橢圓,并以此軌跡進行建模[19]。本文采用基于極坐標理論的尺蠖步態(tài)軌跡規(guī)劃方法,首先時間信號t為基礎(chǔ),建立兩個極坐標方程,分別對應(yīng)笛卡爾空間下的X軸和Y軸的軌跡信息。具體的數(shù)學模型如式(25)所示:
(25)
式中,X和Y分別代表機器人末端連桿坐標系在笛卡爾空間下的坐標位置,即為(X,Y)。Xα和Yα為機器人末端連桿坐標系的初始位置相對于基座標系的初始位置偏移量,XR與YR則為尺蠖步態(tài)軌跡在笛卡爾坐標系下在X軸與Y軸上的振幅,調(diào)節(jié)XR可以改變調(diào)整機器人的運動步長,調(diào)節(jié)YR能夠調(diào)整機器人與墻面的最遠距離,但是該參數(shù)的設(shè)置不宜過大,否則機器人會出現(xiàn)后仰傾覆的問題。t為實時時間信號,T是一個正增益系數(shù),該系數(shù)可以直接影響到機器人的運行速度。
為了對模型進行分析,實驗設(shè)置了三組參數(shù)來進行相互對比驗證,各個參數(shù)設(shè)置如式所示:
(26)
在上述仿真平臺中進行實驗仿真,得到如圖5所示的三組數(shù)據(jù),三個圖分別表示以上三組數(shù)據(jù)下機器人末端連桿坐標系在笛卡爾空間下的運動軌跡,從圖(a)、(c)、(e)中可以看出伴隨著Xα和Yα的逐漸增大,其橢圓形軌跡的X軸和Y軸的亦隨之增大。其中X軸的數(shù)據(jù)變化范圍分別是(1,3),(1,5),(2,8),Y軸的數(shù)據(jù)變化范圍分別是(1.5,2.5),(2,4),(3.5,6.5),并且X軸的數(shù)據(jù)跨度為XR的2倍,Y軸的數(shù)據(jù)跨度為YR的2倍。故機器人的運動步長和運動幅度可以由Xα和Yα的值進行調(diào)整。
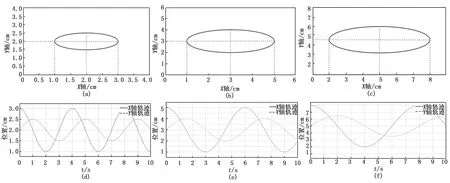
圖5 步態(tài)軌跡規(guī)劃仿真實驗數(shù)據(jù)圖
從圖5(b)、(d)、(f)中的曲線可以得到,隨著增益系數(shù)T的不斷增大,曲線在單位時間內(nèi)的振動頻率明顯逐漸減小,即在相同的時間內(nèi),T值越大,末端連桿坐標系在笛卡爾空間坐標系下完成的橢圓軌跡數(shù)量就會相應(yīng)減少,也就是T值越小機器人運行速度越快,T值越大運行速度越慢。由此實驗驗證可知,該基于極坐標的仿尺蠖爬壁機器人的步態(tài)控制方法是有效的。
4 仿尺蠖多模式爬壁機器人控制系統(tǒng)設(shè)計與實驗
4.1 多模式爬壁機器人控制系統(tǒng)硬件設(shè)計
完成仿尺蠖爬壁機器人的運動學建模、步態(tài)規(guī)劃仿真后,基于這些數(shù)據(jù),對于仿尺蠖多模式爬壁機器人的控制系統(tǒng),設(shè)計了上、下位機兩個部分。上位機部分采用基于Android平臺的手持式終端設(shè)計,下位機部分采用基于STM32F407嵌入式控制器的主控系統(tǒng)。
上位機手持終端的設(shè)計如圖6所示,終端采用無線圖數(shù)傳輸模塊接收下位機傳輸?shù)囊曨l信息和控制信息,底層控制芯片采用STM32F103控制器采集搖桿和按鈕的信號,同時接收下位機上傳的電機、傳感器等反饋信號,最后將采集的控制數(shù)據(jù)打包傳輸給Android平臺。上位機主監(jiān)控平臺采用Android平臺,屏幕上設(shè)計監(jiān)控區(qū)和設(shè)置區(qū),其中監(jiān)控區(qū)顯示爬壁機器人的現(xiàn)場視覺監(jiān)控畫面及監(jiān)控的電壓、電流、壓力、速度和角度等參數(shù),設(shè)置區(qū)提供信道選擇、工作模式、電機參數(shù)等設(shè)置,后臺處理程序同時把這些控制數(shù)據(jù)下發(fā)給機器人。
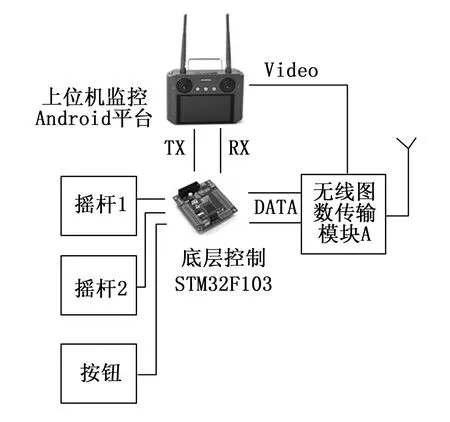
圖6 上位機手持終端
爬壁機器人控制系統(tǒng)結(jié)構(gòu)如圖7所示,主控采用STM32F407控制器,外接伺服電機、舵機、真空泵控制模組、直流電機和無線圖數(shù)傳輸模塊。主控器首先接收上位機手持終端通過無線圖數(shù)傳輸模塊下發(fā)的配置參數(shù),寫入存儲器后,啟動主程序。其中主控通過CAN總線控制3個關(guān)節(jié),關(guān)節(jié)為驅(qū)控一體結(jié)構(gòu),同時帶扭矩控制的伺服電機,可以提供24 N·m的扭矩。
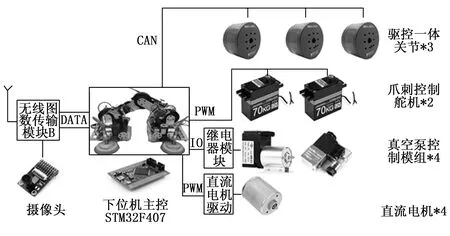
圖7 下位機控制系統(tǒng)
吸附裝置采用真空泵和電磁氣閥組合控制實現(xiàn)吸附和脫附功能[20-22],當需要吸附時真空泵打開進行吸附,控制器可以通過壓力傳感器檢測吸附效果,當需要脫附時,控制器一邊控制真空泵繼電器失電停止抽真空,同時為了加快脫附,另一邊通過控制加裝的電磁氣閥得電加快放氣。爪刺模組的控制,通過兩個舵機來控制兩個足端的爪刺的張合,在兩足吸附后,通過控制爪刺的收縮量來控制抓附的力度,從而增強吸附能力,提高了多種粗糙度壁面的適應(yīng)能力。機器人同時可以在平面到壁面的過渡進行行走,其通過主控驅(qū)動直流電機以實現(xiàn),這個行走功能增加了機器人的運動模式,適應(yīng)仿尺蠖多模式爬壁機器人的各種運動場景。
4.2 多模式爬壁機器人控制系統(tǒng)軟件設(shè)計
完成控制系統(tǒng)硬件設(shè)計后,需要進行機器人控制軟件設(shè)計[23-25],仿尺蠖多模式爬壁機器人軟件控制程序流程如圖8所示,左側(cè)為下位機主控程序結(jié)構(gòu),右側(cè)為上位機監(jiān)控端程序結(jié)構(gòu)。首先上位機監(jiān)控端主要是視頻顯示和收發(fā)控制數(shù)據(jù),與下位機通過通信關(guān)鍵幀來判斷連通狀態(tài),及時發(fā)現(xiàn)通信故障并顯示故障代碼。下位機主控通過上位機下發(fā)通信狀態(tài)關(guān)鍵幀來判斷通信鏈路狀態(tài),系統(tǒng)啟動后首先進行姿態(tài)復位操作,初始化機器人初始位置,記錄編碼器初始值。反饋復位狀態(tài),等待監(jiān)控終端指令,當接收到終端指令后,根據(jù)控制參數(shù),啟動對應(yīng)的運動模式。不同的運動模式對應(yīng)不同的步態(tài)軌跡算法,算法相應(yīng)的控制機器人各個關(guān)節(jié)運動姿態(tài),主控制器實時將關(guān)節(jié)伺服電機的如電壓、電流、位置、角度和扭矩等信息上傳到算法模塊進行實時動態(tài)調(diào)整,同時主控也監(jiān)測關(guān)節(jié)數(shù)據(jù)以及控制系統(tǒng)電壓、電流、真空壓力等信息,如果發(fā)現(xiàn)異常及時報警。
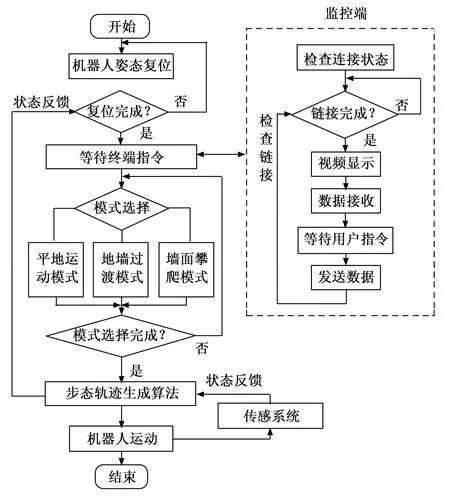
圖8 控制系統(tǒng)軟件程序流程圖
4.3 多模式爬壁機器人攀爬實驗
根據(jù)以上仿尺蠖多模式爬壁機器人控制系統(tǒng)搭建,結(jié)合步態(tài)規(guī)劃仿真數(shù)據(jù),進行了機器人攀爬實驗。仿尺蠖多模式爬壁機器人自重約9 kg,總長約75 cm,仿尺蠖爬壁機器人攀爬實驗如圖9所示。

圖9 攀爬實驗
首先機器人根據(jù)箭頭方向以直線姿態(tài)前進到目標墻壁,通過前足的吸附及爪刺收縮實現(xiàn)固定,之后開始地墻過渡動作,上位機發(fā)出過渡指令后,下位機主控根據(jù)指令運行過渡程序,控制3個關(guān)節(jié)實現(xiàn)翻轉(zhuǎn),機器人從直線狀態(tài)轉(zhuǎn)換到爬壁狀態(tài),之后后足進行吸附固定,整個過程耗時1.5 s。之后機器人雙足吸附在壁面,進行向上攀爬,經(jīng)過測試,機器人設(shè)置路程1 000 mm,負載2 kg時,速度可達90 mm/s,實驗驗證了多模式爬壁機器人攀爬功能的可靠性,但是由于機器人吸附和脫附比較耗時間,所以機器人整體目前速度不是太快,后期可以進一步優(yōu)化步態(tài)算法。
同時采集的關(guān)節(jié)3的軌跡角度誤差數(shù)據(jù)如圖10所示,在負載測試情況下,關(guān)節(jié)3軌跡誤差在短暫振蕩超調(diào)后,于0.24 s左右進入穩(wěn)定狀態(tài),實驗證明機器人在運動過程中具有良好的穩(wěn)定性,實現(xiàn)了各項預設(shè)目標。
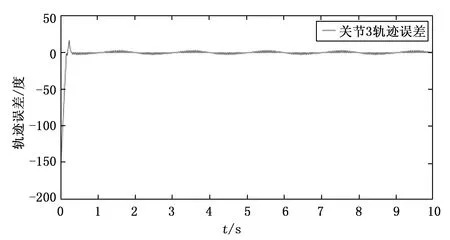
圖10 關(guān)節(jié)軌跡誤差圖
5 結(jié)束語
本文結(jié)合自然界尺蠖類生物的壁面攀爬機理,利用仿生爬壁技術(shù),研發(fā)了一種仿尺蠖多模式爬壁機器人,機器人設(shè)計了真空吸附和爪刺抓附兩種吸附裝置,并建立了機器人運動學模型,進行了正、逆運動學求解。同時研究了基于極坐標理論的機器人步態(tài)控制方法,并通過地墻過渡和壁面攀爬測試,實驗表明該設(shè)計可以完成爬壁機器人的地墻狀態(tài)切換,并且壁面攀爬速度可達90 mm/s,運行過程穩(wěn)定,具有良好的抗傾覆能力。本文研究的仿尺蠖多模式爬壁機器人建模與控制方法為雙足類仿生機器人進一步研究提供了參考。
