動車組轉向架部件智能清洗中心關鍵技術研究
2022-10-28 03:08:22何武山
鐵道建筑技術 2022年10期
何武山
(中鐵第四勘察設計院集團有限公司 湖北武漢 430063)
1 研究背景
我國高鐵運行速度高(最高達350 km/h)、交路長(最長超2 700 km),長期在復雜嚴苛工況下工作的動車組列車須定期到動車段、所進行可靠檢修才能保證列車運行安全。動車組由大量復雜精細的零部件組成,零部件檢修是動車組檢修的重要內容,而對零部件進行有效清洗是進行檢修作業的前提。
根據動車組檢修規程,動車組檢修包括一、二、三、四、五級修,其中四、五級修須將轉向架分解為構架、輪對、電機等部件并分別對各部件進行檢修[1]。轉向架部件是動車組最復雜的零件,其清洗是檢修過程的關鍵環節,是后續探傷等工序的先決條件。轉向架零部件數量多、形狀復雜、質量體積大、污垢特性多樣,清洗工作量大、難度高。
目前,國內動車段對轉向架關鍵部件清洗所采用的工藝為:利用天車等運輸工具將部件轉運至清洗工位后通過清洗機或人工(雖然已研發部分清洗設備[2-3],但效果欠佳)進行清洗,且清洗工位分散布置在檢修庫的各部件檢修流水線上,既有清洗現狀如圖1所示。
此種清洗模式及工藝主要存在三個問題:
(1)清洗過程尤其是部件轉運需消耗巨大的人力物力,作業人員勞動強度大。
(2)清洗過程主要依賴人工,清洗效率不高導致影響整條檢修線的效率,還會因清洗質量不達標造成檢修線工藝回流。
(3)敞開、地攤式清洗作業方式影響了整個轉向架檢修庫的作業環境。
截至2020年底,我國配屬動車組已超4 000個標準組。隨著我國高鐵進一步發展,配屬動車組繼續增加,部件清洗工作量也相應增加,傳統清洗模式效率不足的問題已逐步成為制約各動車段檢修能力的一大瓶頸,影響了動車組的周轉效率。
2 部件清洗基礎技術研究
2.1 部件清洗工作量分析
按照全國動車組保有量4 200列測算,平均每年約需完成840列動車組的四級修和420列動車組的五級修,則有1 260列動車組轉向架部件需要清洗,年均轉向架清洗工作量為20 160臺。每臺轉向架又可分解為零部件,這些零部件在檢修過程中均需進行充分清洗。
目前,全國承擔動車組檢修作業的動車段共有七座,假設上述部件的清洗工作全部集中在全國七大動車段內,則平均每個動車段每天的轉向架清洗工作量約為12臺。清洗工作量分解后的主要零部件清洗作業量如表1所示,清洗工作量巨大。
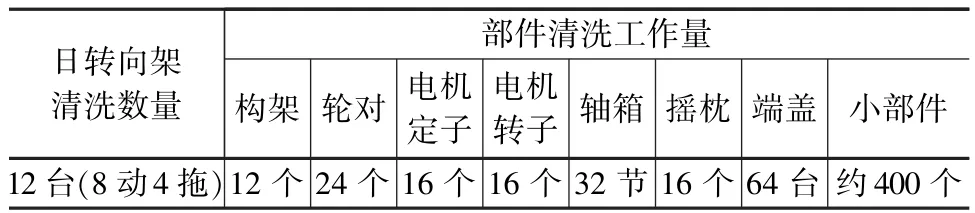
表1 動車段日均部件清洗工作量測算
2.2 動車組部件污垢及特點分析
(1)外部沉積物:空氣中的顆粒如塵埃、昆蟲尸體等附著在被油脂污染的零件表面上,由于動車組運行速度高,轉向架上的外部沉積物附著力大。
(2)油污:潤滑油發生老化,氧化聚合后的產物包括機油、焦油、碳質瀝青和灰粉等。
(3)銹垢:由于金屬和合金的化學、電化學破壞而形成。
轉向架上不同部件,其污垢類型及特性有所不同。轉向架構架表面主要為外部沉積物污染,且由于動車組運行速度高其污漬結合力較大;輪對的主要污垢與構架相似,但因長期與軌道直接接觸更易產生銹垢;電機清洗分定子和轉子,定子外表面直接接觸外部環境,污染物以沉積物為主,內表面較為干凈,轉子則因轉軸的存在而會附著潤滑脂等油污。轉向架部件主要污垢類型及特性[4]如表2所示。

表2 污垢特性分析
2.3 清洗工藝研究
根據現場調研并參照機車大部件清洗模式[5],轉向架部件清洗宜采用壓力噴射清洗。該清洗方式在工件四周布置若干噴嘴,通過強去污能力的水基清洗液、水和清洗壓力對工件表面噴射液流,即對工件表面進行沖刷清洗以去除污物。水射流清洗常用參數[6-7]如表3所示。
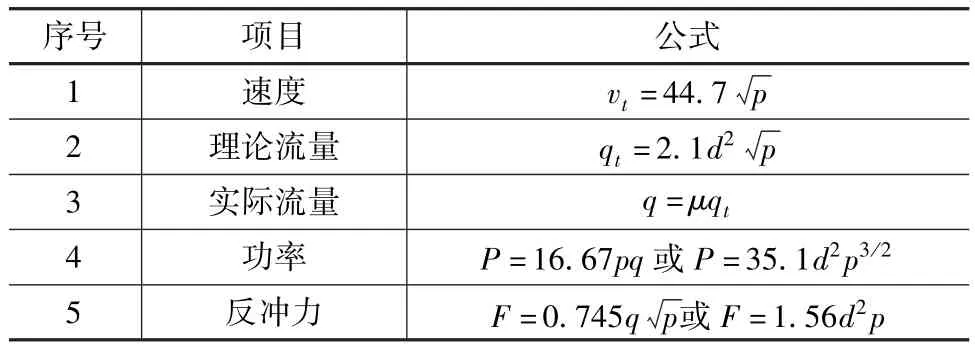
表3 水射流清洗參數
表3 中:vt為水射流速度,m/s;qt、q為水射流流量,L/min;p為水射流壓力,MPa;d為噴嘴出口直徑,mm;μ為流量系數;p為水射流功率,W;F為水射流反沖力,N。
2.4 部件清洗機設計
目前,因缺乏高質、高效部件自動清洗機,國內各動車段對轉向架零部件清洗以人工方式為主,而人工清洗模式效率較低且作業環境差。研發高質、高效自動清洗機是解決既有清洗模式問題的前提。
部件清洗機設計主要包括機械結構、噴淋系統及現場控制系統設計三部分。
機械結構是清洗機的基礎,由支持框架結構、洗刷動力系統(電動機、傳動系統等)及執行機構組成。
噴淋系統是實現射流清洗的核心部件,由管路系統、水泵及噴嘴組成,其設計包括管路設計及水泵和噴嘴的選型。噴嘴選型與部件的污垢特性息息相關,不同部件清洗機的噴嘴形狀、布置均不同,選擇合適的噴嘴形狀并進行合理排布是實現良好清洗效果的關鍵。
控制系統是部件清洗機設計的重點,其以可編程控制器為核心,采用各種傳感器對清洗的位置信號、故障信號等進行檢測,實現對清洗機的有效控制,確保清洗任務順利完成。
典型的電機清洗機結構模型如圖2所示。
3 智能清洗中心系統方案研究
為解決傳統“敞開、地攤”式清洗存在的問題,本文提出轉向架部件智能清洗中心系統方案。
3.1 智能清洗中心系統組成
智能清洗中心為一個完全用于部件清洗的封閉空間,設置在動車段內合適位置。為取代人工清洗,智能清洗中心設置構架、輪對、牽引電機等各類部件清洗機;高效的零部件上下料及轉運系統可為高效清洗提供保障;同時,智能清洗中心還設有智能運維及污水集中處理系統。
3.1.1 各類零部件清洗機
“機洗代替人洗”是實現動車段“減員增效”、降低勞動強度的關鍵環節。部件清洗機的種類應能兼容轉向架各種形狀、尺寸的零部件,部件清洗機的數量應能匹配動車段內轉向架部件的檢修能力。具體來說,應針對轉向架構架、輪對、電機定子轉子、小型零部件分別配置專用清洗機。各清洗機數量應按照一定的比例配置,該比例根據各部件的清洗時間及一臺轉向架中各部件的比例確定,而數量則與動車段的檢修能力、主檢修庫至智能清洗中心的部件流轉時間等因素有關。
3.1.2 零部件智能運輸AGV系統
為實現零部件從轉向架庫到智能清洗中心、智能清洗中心內部及由智能清洗中心回到檢修流水線的高效運輸,采用智能工件轉運系統——自導引AGV運輸車。主檢修庫與智能清洗中心之間及智能清洗中心內部設有AGV運輸通道,AGV可在通道上沿預定路線行走,完成零部件快速運輸。
轉向架部件質量大、形狀復雜,AGV運輸車須進行專用設計。AGV運輸車由供電儲能系統、驅動控制系統、導航定位系統、調度仿真系統和安全系統組成[8-9]。
驅動及其控制系統是AGV實現自主運動的直接執行機構;導航定位系統[10]可確保AGV運輸零部件沿著正確的軌跡行走;調度系統是AGV無人運輸系統的指揮中樞,其與每一輛AGV小車保持實時通訊,指揮運輸車高效完成運輸作業。智能清洗中心內的AGV運輸車通訊網絡如圖3所示。
安全系統由安全掃描傳感器、緊急停止按鈕、安全PLC等組成。其中,安全掃描傳感器具有廣闊的掃描角度,同時具有雙重或以上的安全距離識別能力,以在較遠距離判斷目標位置并及時做出正確反應,確保運輸安全。
3.1.3 自動上下料系統
傳統部件清洗轉運主要依賴人力。智能清洗中心設置自動上下料桁架機械手[11-12],具備與AGV系統互聯的接口,實現零部件由AGV到清洗工位清洗機的無人轉運。上下料機械手通過設置在清洗中心內的導軌實現平面方向的靈活移動,并具備豎向移動功能,從而實現任意位置AGV運輸車上零部件的抓取。
3.1.4 大部件補洗區
構架是轉向架的最大部件,其表面積大、外形復雜,清洗中需專用工裝支撐,難免遮擋部分清洗噴嘴,很難通過清洗機一次作業實現構架的徹底清洗。為此,智能清洗中心設置大部件(構架)補洗區,實現清洗死角的徹底清潔。
3.1.5 污水集中處理及回用系統
轉向架部件的清洗介質為化學清洗劑與水按照一定比例組合的混合液,清洗后的廢水會產生大量油污等物質,為嚴重污染物。為實現廢水集中處理,智能清洗中心設置污水集中處理及回用系統,各清洗機上均設有與污水集中處理站連通的排水及回水管。管道及污水處理站均為密閉系統,避免了對作業環境的影響。
3.1.6 基于BIM的資產運維管理系統
為統籌智能清洗中心內各子系統,智能清洗中心設置一套統籌監控系統——基于BIM的資產運維管理系統[13]。該系統基于智能清洗中心的BIM模型構建,并與整個動車段的資產運維管理平臺關聯,實現資產的信息傳遞交互和集成共享。資產運維管理系統還可以監控各個子系統的運行狀態,協調各個子系統間的任務,提高清洗中心整體運行效率,并對關鍵運行參數異常及時報警。
3.2 智能清洗中心工藝研究
根據動車組檢修規程,轉向架檢修工藝復雜,但可概括為五大過程:整體預清洗、拆解為各部件、各部件清洗、各部件檢修、修竣后的部件組裝。
目前,全國各動車段內均設有轉向架檢修庫,并設有轉向架部件檢修流水線,包括構架線、輪對線、電機線等。在傳統模式下,各部件清洗工位分散設置在各自檢修流水線內,其與智能清洗中心的轉向架檢修工藝本質區別在于轉向架在分解為構架、輪對等部件后,分別運輸至智能清洗中心進行集中清洗,取代了在各零部件檢修線上分別設置清洗工位的分散清洗方式。基于智能清洗中心的轉向架檢修工藝流程如圖4所示。其中部件在各檢修線與智能清洗中心的運輸均通過自導引AGV實現。
3.3 智能清洗中心總體布局
智能清洗中心即前述零部件清洗機、AGV智能運輸、自動上下料等系統和部件的系統組合。為實現智能清洗中心的高效工作,需對各系統進行合理布局,為此對智能清洗中心的總體布局進行研究,提出其總體布局如圖5所示。
智能清洗中心設有零部件入口、AGV運輸主通道及零部件出口,出入口設在對側避免了AGV運輸車的路線相互交叉,AGV運輸主通道設在中間,各零部件清洗機設在通道兩側。清洗中心內設有零部件緩存區,以提高應急能力。桁架機械手可實現清洗部件自動抓取、傳輸。清洗中心的一角設有調度監控室,對各部件、系統的運行情況進行實時監控;另一角設有污水集中處理區,與每一臺清洗機通過管道連通,可實現清洗污水的集中處理、回用。
4 總結
本文從分析既有動車組轉向架部件清洗模式存在的問題出發,針對清洗過程中的痛點提出了一種新的部件清洗工藝及方法——基于智能清洗中心的部件清洗工藝,該模式可解決傳統敞開式清洗導致的問題,提高部件清洗質量、效率,同時可減少清洗過程的人員消耗,適應我國鐵路“減員、增效”的發展方向,可在全國各大動車段及從事部件檢修工作的主機廠推廣應用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
制造技術與機床(2019年12期)2020-01-06 03:17:46
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
西南交通大學學報(2018年5期)2018-11-08 10:58:26