基于ABAQUS的桁架機器人模態分析
2022-11-02 12:45:52朱奕錕余聯慶周嘉誠
武漢紡織大學學報 2022年5期
朱奕錕,余聯慶,周嘉誠,馮 娜
基于ABAQUS的桁架機器人模態分析
朱奕錕1,余聯慶*1,周嘉誠2,馮 娜1
(1.武漢紡織大學 機械工程與自動化學院,湖北 武漢 430200;2.華中科技大學 機械科學與工程學院,湖北 武漢 430074)
為了確保桁架機器人在設計階段滿足模態性能要求,在設計前期需要對桁架機器人進行模態分析研究。本文首先根據物流工廠中的實際需求,確定桁架機器人的整體結構,并建立三維模型;然后基于ABAQUS有限元仿真平臺提取桁架機器人的前十階固有頻率以及振型;最后通過模態試驗方法對桁架機器人的實體縮小模型進行分析。結果表明:模態試驗結果中存在四種振型與ABAQUS分析結果中的四種振型吻合程度較高,驗證了仿真實驗的可靠性。所做分析為避免發生共振及后續改進等研究提供理論支持。
桁架機器人;ABAQUS;模態仿真;模態試驗
0 引言
隨著“中國制造2025”的不斷推廣,鼓勵制造企業進行物流智能化轉型,推動物流、智能倉儲等物流新技術、新設備的應用。在這個過程中,智能物流工廠必須堅持以智能產品為主體,智能生產為主線[1]。工業機器人是整個生產過程中的關鍵環節,能有效降低人工成本,提高生產效率。桁架機器人也叫直角坐標機器人,是工業機器人的一種。由于桁架機器人有著可承受重質量運輸、剛度大、強度高、安全系數高等特點,使得它在物流工廠應用中的優勢更加明顯。當前,桁架機器人在智能制造中有著舉足輕重的地位,它不僅大大降低了企業總成本中的勞動力投入成本,而且顯著提高了制造業中的生產效率。桁架機器人主要以直線運動為主,由X,Y及Z方向分別提供3個獨立的自由度,完成工作空間點的定位工作。桁架機器人作為智能物流工廠輸送線中的重要組成部分,對整個系統起著至關重要的作用,必須保證桁架機器人正常工作情況下的運動精度及可靠性。因此,對桁架機器人進行模態分析的研究具有重要的意義。
國內外學者對結構的模態分析進行了大量研究。Wu[2]等通過晶片處理機器人的動力學模型,得出影響機器人低頻振動的相關參數,并利用約束函數定義對機器人進行優化。Soo[3]通過有限元分析的相關程序對機器人受到外界激勵時的瞬態響應進行了仿真分析,再通過實驗證明其有限元分析模型的可靠性。薛鋒偉[4]利用Adams/vibration插件對輸送桁架機器人的振動模型進行了分析,得出了輸送系統的振動響應特性。王帥[5]分析了高速鋁錠堆垛機動力學模型的靜態模態、諧波響應。并通過仿真結果為堆垛機的動態特性方面的優化提供了理論指導。刑玉明[6]通過LMS動態測試系統對碼垛機器人進行分析得出其動態特性,并與有限元軟件的仿真結果進行了相應的對比分析,驗證了實驗的可靠性。
實際工作中,桁架機器人產生的變形和振動將會直接影響其加工精度及穩定性,而采用傳統的設計方法已越來越難以滿足現代加工產品的高精度、高可靠性要求,因此,亟須尋求更精確、高效的現代設計方法來解決這一問題。利用現代設計方法可以在計算機環境下進行桁架機器人的建模、仿真等操作,快速地研發出高剛度、高可靠性的桁架機器人。本文基于ABAQUS平臺對整體桁架機器人進行仿真分析,對桁架機器人進行模態分析,并為桁架機器人的進一步分析研究和結構優化提供理論指導。
1 桁架機器人結構介紹
本文研究的桁架機器人應用于某物流工廠自動化輸送線中。它主要代替人工進行物料的輸送,高速高精度,能有效提高物料的運輸效率。物流工廠場地實況圖如圖1所示。其中,立柱間距6米,立柱大小500×500mm,除去立柱寬度,兩個立柱間是距離是5.5米。由圖1中現場實際測量可知,車間最低位置4.1米,所裝配的桁架機器人必須避開該尺寸。因此,所設計的桁架機器人X軸橫梁方型鋼的尺寸為120×120×5000mm,Y軸橫梁方型鋼的尺寸為120×120×10000mm,Z軸豎梁方型鋼的尺寸為120×120×3000mm,立柱方型鋼的尺寸為150×150×3000mm。
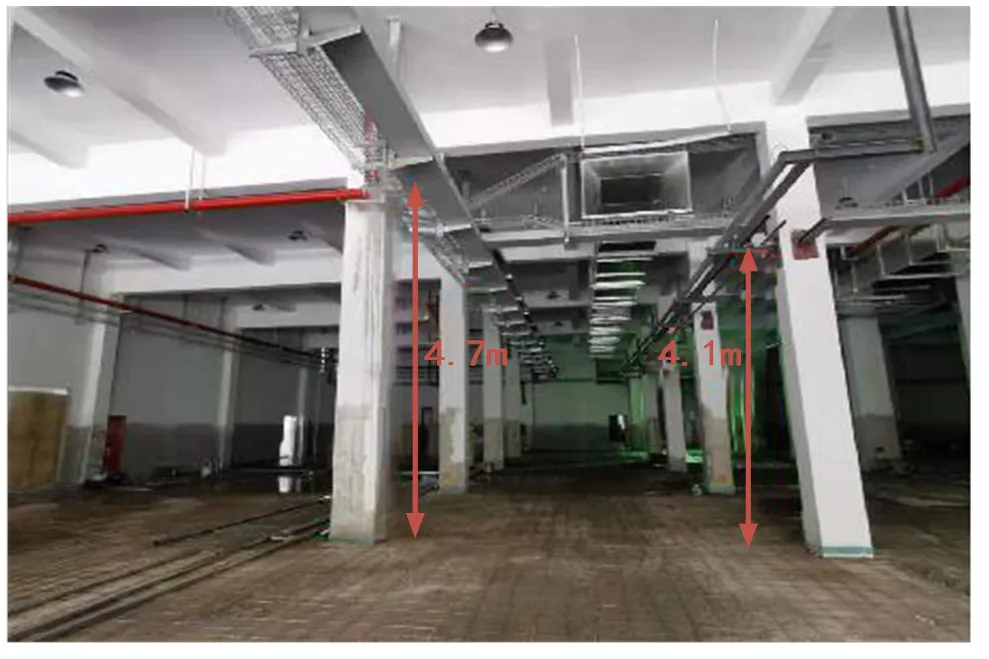
圖1 場地實況圖
由于桁架機器人主要由橫梁、豎梁、立柱、末端執行器、滑臺、傳動系統以及伺服系統等幾個部分組成,則利用SolidWorks軟件建立的三維實體模型如圖2所示。
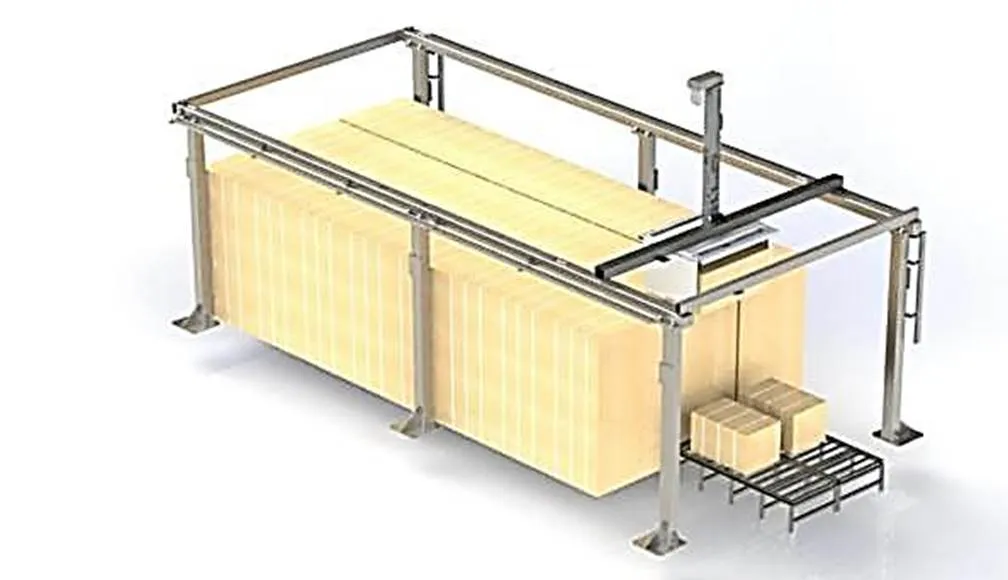
圖2 桁架機器人三維實體模型
桁架機器人的各組成部件的材料屬性如表1所示。
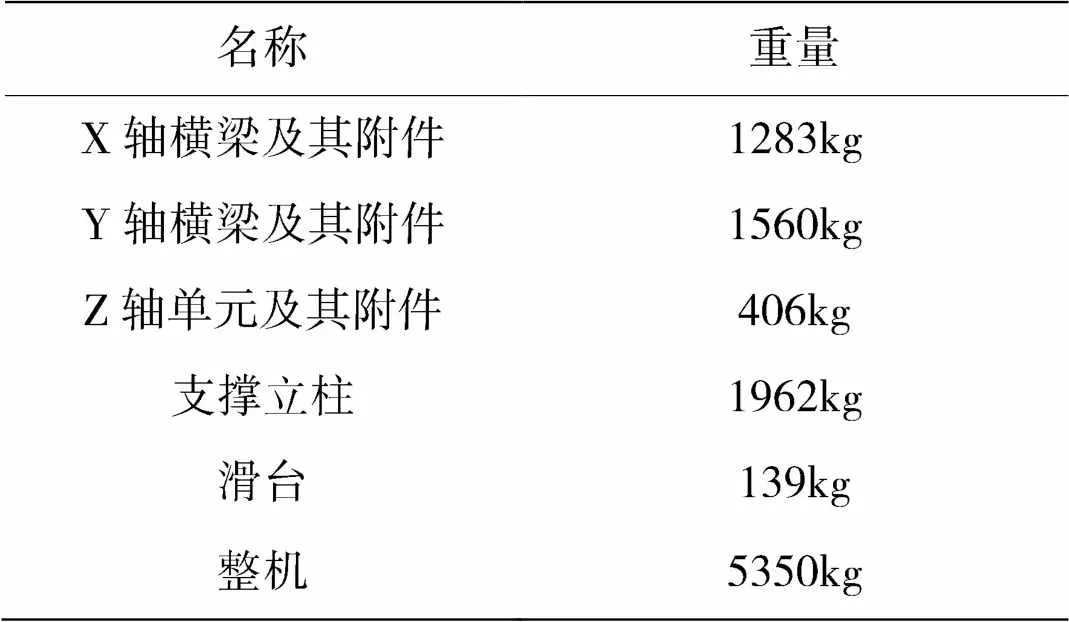
表1 桁架機器人參數
作為本文研究對象的桁架機器人可實現沿X、Y軸方向的水平直線運動和末端執行器沿Z軸豎直方向的直線運動。其各方向的運動由交流伺服電機通過減速機驅動齒輪與固定于X、Y向橫梁上的齒條進行傳動。
2 模態理論介紹
模態分析是動態特性分析的基礎和核心。它通過模態變換矩陣把復雜結構中多自由度的振動一個個簡化為單個的自由度振動。然后再利用線性疊加,對復雜結構的振動模態進行分析[7]。
根據機械振動理論,當一個機械系統按照其固有頻率自由振動時,系統將具有與該頻率相對應的某種振動形式,因此我們把描述振動形式的向量稱為模態向量。它假定:(1)機械結構的結構剛度矩陣和質量矩陣是常數,恒定不變;(2)除非指定阻尼特性求解方法,否則不考慮阻尼效應;(3)機械結構中的載荷不隨時間變化。
對任一確定的多自由度系統,其在物理坐標系下的運動微分方程可表示為:


而在無阻尼自由振動時,系統中各個節點的振幅不一定全部為0,則此時系統的自頻率方程可表示為:

模態分析被認為是研究振動特性的一種研究方法。其手段主要是利用模態分析得到的參數,即固有頻率和模態振型,為結構的改進提供必要的理論依據。其中,振動的低階振型對結構的振動影響較大,對結構的動態特性起決定作用。對于模態分析結果而言,階數越低對系統的影響就越大,因此在模態分析時,一般求解前6~10階即能滿足精度要求。
3 桁架機器人模態仿真與試驗
3.1 仿真模型建立及約束設置
由于桁架機器人是一個復雜的裝配體,若直接將其進行網格劃分和有限元分析,則會極大地影響網格劃分質量和計算效率以及計算結果的準確性。因此,首先基于SolidWorks平臺,將橫梁、豎梁、滑臺等部件上的螺紋孔、倒角等對整體機器人應力應變影響較小的細小結構進行簡化。在完成幾何模型的簡化后,然后再導入到ABAQUS中,再根據不同部件的外部形狀,選擇合理網格劃分方式,將節點對齊,進而各部件的網格拼接。最終,共生成單元10125個,節點18947個。然后根據桁架機器人的實際工況,在相互條件的模塊選項中選擇固定約束,并選中桁架機器人各個立柱地面,然后添加固定(Bonded)約束。然后在X、Y軸橫梁、滑塊與導軌之間也相互添加固定(Bonded)約束,模擬其各部件間的固定作用。最后,在載荷模塊選項中選擇重力選項,添加重力加速度。桁架機器人有限元仿真模型如圖3所示。

圖3 桁架機器人有限元仿真模型
3.2 模態試驗器材及試驗模型建立
由于實際模型體積較大,模態試驗操作起來較為困難,因此本文按1:15做了一個縮小的桁架機器人模型進行現場的模態試驗分析。模態試驗系統如圖4所示,主要由以下三個部分組成:激勵系統、測量系統、數據采集及處理系統。
激勵系統主要包括激振器系統、沖擊力錘、步進激勵設備等。激振器通常需要與信號發生器和功率放大器一起使用。沖擊力錘是一種非固定激勵系統,其不需要與試件連接,也不會影響機構的動態特性。本研究采用沖擊力錘作為激勵系統,如圖4(a)所示。
測量系統負責采集被測物理量,然后將其轉換為電信號,通過預放大和微積分變換將電信號轉換為電壓信號,以便使用分析儀器。本研究的測量系統由PCB加速度傳感器和相關配套的電路組成。如圖4(b)所示。
數據采集和處理系統通過LMS測試、記錄和測量數據[9]。它包括記錄脈沖信號和傳感器的運動信號,同時處理數據,例如計算頻率響應函數。本研究的數據采集和處理系統如圖4(c)。

圖4 模態試驗系統
根據桁架機器人各個部件的尺寸,通過測點布置中盡可能不缺失結構、盡量簡化的原則。測點布置如圖5所示。圖中黃色標示點即為測量點,一共17個測點,測點的編號分不同的部件按順序進行布置。這樣的布點基本能滿足布點的原則,包括了反映低階模態特性的重要點和反應整體動態特性的關鍵點。從而建立試驗模型如圖5所示。
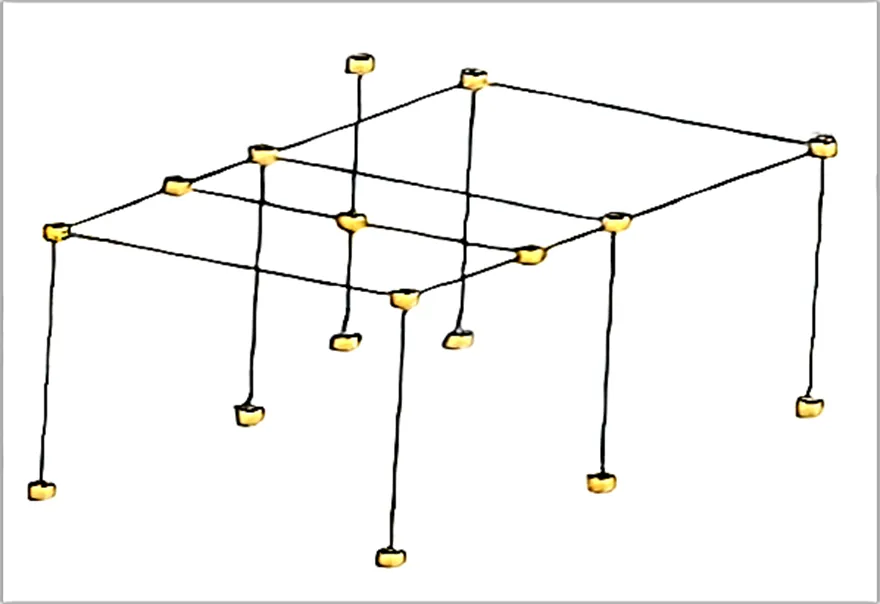
圖5 桁架機器人試驗模型
4 模態結果分析
由于固有頻率是結構的固有特性,機器人無論運行到何種位置狀態,其易受影響的頻率范圍都大致相同[8]。因此,本文將桁架機器人各方向上的移動軸設置在抓取物料的提升階段,這樣可以模擬桁架機器人在抓取工作中時受到的沖擊影響。再根據前面進行仿真的相關設置在ABAQUS中進行線性攝動的分析步驟后提交作業,在有限元模型中進行后處理,得出桁架機器人的前十階固有頻率及振型[9]。固有頻率如表2所示,振型云圖如圖6所示。
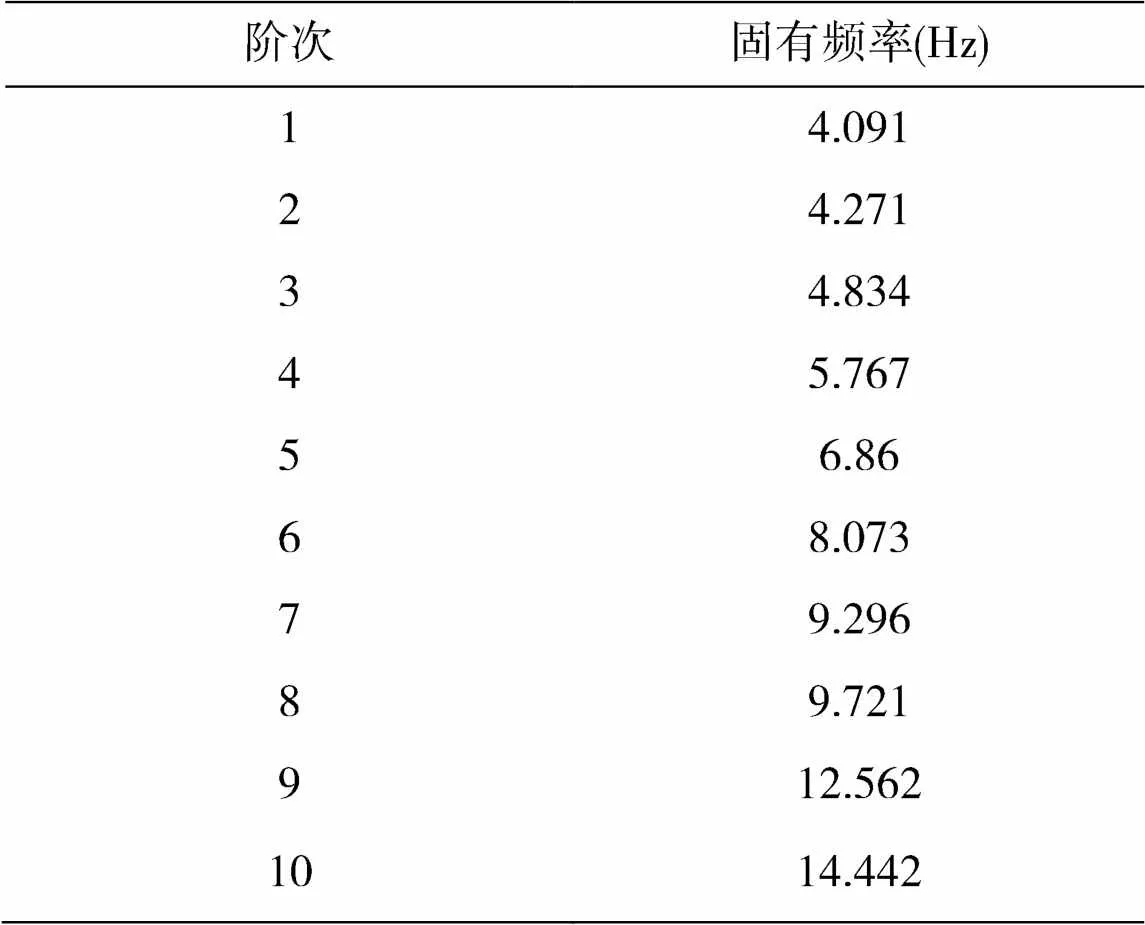
表2 桁架機器人前10階固有頻率

圖6 桁架機器人前10階振型云圖
觀察圖6可知,在大多數固有頻率作用下,桁架機器人的末端執行器振動都比較明顯,而末端執行器正是桁架機器人在整個運輸碼垛工作過程中最為關鍵的部件。若是桁架機器人出現了共振的現象,末端執行器的變化會非常大。因此,在確保桁架機器人工作效率的前提下,可以通過控制桁架機器人驅動系統中的伺服電機的工作速度,使其激振頻率遠離桁架機器人的整體結構的固有頻率,從而避免工作過程中發生共振現象,影響機器人的工作精度以及使用壽命。
圖7是由LMS測試系統分析得出的試驗模型部分階數的振型動畫,從圖中觀察可以看出其振型分別為:左側兩根立柱以及X軸橫梁沿著Z軸正方向變形;桁架機器人整體框架朝X軸正方向變形;兩根Y軸橫梁朝整體結構中間變形;兩根Y軸橫梁朝Z軸正方向變形。與ABAQUS模態仿真結果的第5、7、9、10階振型幾乎相同,二者一致性較好,這說明了其桁架機器人建模與約束條件設置的準確性[9]。
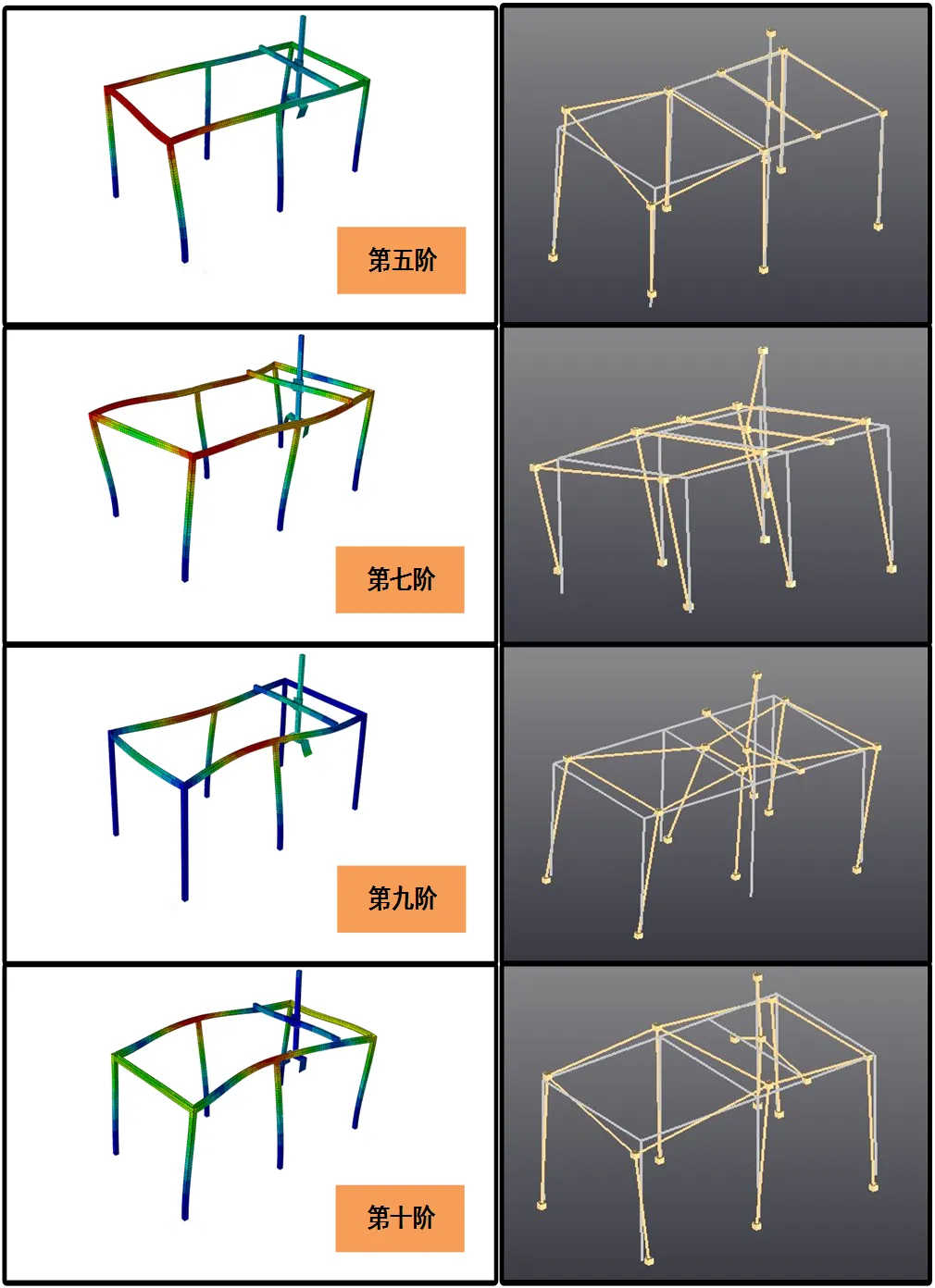
圖7 桁架機器人部分模態仿真與試驗振型
5 結論
本文以桁架機器人為研究對象,通過ABAQUS軟件以及模態試驗對桁架機器人進行模態分析,得出以下結論:
(1)通過ABAQUS有限元仿真,計算出桁架機器人的固有頻率及其振型。在實際工作時應避免出現與之相近的工作頻率,避免發生共振。
(2)根據模態試驗分析,得出縮小模型中存在四種振型與ABAQUS仿真平臺求解出的第五、七、九和十階模態振型高度對應,二者一致性較好,驗證了實驗的可靠性。
(3)該桁架機器人的整體固有頻率偏低,易發生共振現象,應繼續進行結構優化,以提高其固有頻率,優化其振動性能。
[1] 李媛. 國家審計推動制造業高質量發展的路徑研究[J]. 商展經濟, 2020, (04): 108-110.
[2] Ming Yue Wu, Yan Jie Liu, He Gao Cai. Dynamic Analysis and Optimization for Wafer Handling Robot[J]. Advanced Materials Research, 2014, 3043: 898-898.
[3] Koh Man Soo, Kwon Soon Ki, et al. A Study for the Dynamic Characteristics and Correlation with Test Result of Gantry Robot based on Finite Element Analysis[J]. Journal of Digital Convergence, 2015, 13(1).
[4] 薛鋒偉. 兩軸高速傳料機械手動靜態性能分析[D]. 揚州: 揚州大學, 2014.
[5] 王帥. 高速鋁錠堆垛機機體的數學建模及動態性能分析[D]. 蘭州: 蘭州理工大學, 2009.
[6] 邢玉明. 碼垛機器人的動態特性分析[D]. 天津: 天津大學, 2009.
[7] 王文剛, 王蒙, 周素霞, 等. 基于有限元技術的攪拌摩擦焊構架模態分析[J]. 機械制造, 2019, 57(02): 5-8.
[8] 廖能解, 馬平, 李健洪, 等. 上下料桁架機器人仿真研究[J]. 機床與液壓, 2019, 47(21): 9-14+33.
[9] 唐程光, 趙震, 闞洪貴. 基于鋁合金減振器塔的白車身模態分析與研究[J]. 汽車實用技術, 2022, 47(02): 57-60.
[10] 鄒平, 陳元衛. 某扭力梁模態仿真與模態試驗對標研究[J]. 裝備制造技術, 2021, (06): 60-63.
Modal Analysis of Truss Robot based on ABAQUS
ZHU Yi-kun1, YU Lian-qing1, ZHOU Jia-cheng2, FENG Na1
(1. School of Mechanical Engineering; Wuhan Textile University,Wuhan Hubei 430200, China;2. School of Mechanical Science and Engineering, Huazhong University of Science and Technology, Wuhan Hubei 430074, China)
In order to ensure that the truss robot meets the modal performance requirements in the design stage, it is necessary to conduct modal analysis on the truss robot in the early design stage. This paper firstly determines the overall structure of the truss robot and establishes the 3D model according to the actual requirements in the logistics factory. Then the first ten natural frequencies and modes of the truss robot are extracted based on ABAQUS finite element simulation platform.Finally, the model of truss robot is analyzed by modal test. The results show that the four vibration patterns existing in the modal test results are in good agreement with the four vibration patterns in the ABAQUS analysis results, which verifies the reliability of the simulation experiments. The analysis performed provides theoretical support for studies such as resonance avoidance and subsequent improvements.
truss robot; ABAQUS; modal simulation; modal test
余聯慶(1972-),男,教授,博士,碩士生導師,研究方向:機器人機構學.
TD463
A
2095-414X(2022)05-0041-05
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:44
計算物理(2014年2期)2014-03-11 17:01:39
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18