虛擬仿真實驗在空調自控系統實驗教學中的應用
2022-11-03 09:23:06黃廣國朱海青晉廣慶
現代信息科技 2022年17期
黃廣國,朱海青,晉廣慶
(山東大衛國際建筑設計有限公司,山東 濟南 250002)
0 引 言
當前的科學研究和教育領域中,網絡虛擬實驗室的建設正在被各高等院校重視。虛擬實驗教學平臺具有信息量大、模擬計算能力強、數據模型反應快等特征。建筑內中央空調節能運行環境系統是一個變量眾多、關聯復雜、非線性和隨機性強、氣象環境多變的復雜系統,如何能夠在實驗教學中開展各類控制教學實驗,讓學生掌握空調系統的控制設計、運行規律是現實教學的難點。本實驗教學平臺以智能建筑實驗室中的中央空調主機為原型,利用組態軟件做后臺,虛擬仿真軟件做計算樞紐,Web 網頁技術做客戶端,通過軟件系統實時通信的模式,實現遠程網絡實驗教學的目的。
1 空調工程虛擬仿真系統建設
1.1 空調房間數學模型
空調房間數學模型的建立是分析自動控制效果的關鍵,本平臺在模型建立過程中對外界影響因素做以下規定:
(1)忽略空調房間內換氣和外墻熱輻射的影響;
(2)假設被控房間的溫度均勻;
(3)將室外環境的變化作為被控系統的擾動輸入;
(4)忽略圍護結構的蓄熱量。
如圖1所示,就是經過簡化后的空調房間模型
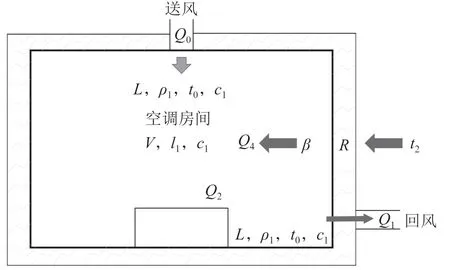
圖1 空調房間模型
圖中:由送風帶入室內的熱量(W),=;為送風量(m/s);為空氣的比熱(J/kg · ℃);為房間的容量系數;t為送風溫度;t為室內的空氣溫度;為空氣密度。
1.2 表冷器的數學模型
系統模型的構建過程中首先忽略表冷器器壁的熱容、物性參數受溫度影響的變化。由制冷機組制成的低溫冷凍水,通過冷凍水循環泵,送至表冷器。冷凍水的冷量通過表冷器的翅片與房間內空氣進行熱交換,達到房間內室溫降低的目的。當冷凍水運載的冷量與空調房間的熱釋放量相同時,空調房間內的溫度穩定不變。通過分析表冷器的熱交換過程,可確定其中串聯為三個環節:
(1)由制冷劑(冷媒)到管壁內側的熱傳遞;
(2)由表冷器內側金屬到表冷器外側金屬的熱傳遞;
(3)由表冷器金屬外側向房間內空氣的熱傳遞。
依據傳熱學定律,對房間內空氣冷卻過程,模型化后建立方程如下:

各參數定義為:,,為冷水定性溫度、被控區空氣定性溫度、被控區外界溫度;為表面冷卻器的比熱容(kJ/(kg · ℃));為建筑物比熱容(kJ/(kg · ℃));為單位時間需要輸入的總冷量;為表面冷卻器與被控區的傳熱功率;為被控區與環境傳熱功率;、:表冷器、被控區的換熱面積(m);、為冷水質量、被控區空氣質量(kg)。
1.3 加熱器的數學模型
忽略加熱器熱惰性的前提下,可得能量平衡方程:
q=f·ρ·c·(-)/
式中:c為空氣的比熱(J/(kg·℃));ρ為空氣密度(kg/m);電加熱器的送風溫度(℃);電加熱器的入口溫度(℃);f風機的送風量(m/s);q電加熱器的功率(W);電加熱器的效率。
在計算加熱器熱惰性的因素下,加熱器的延遲時間可給予忽略,加熱器送風溫度和輸入功率可通過用一階慣性環節來表示:
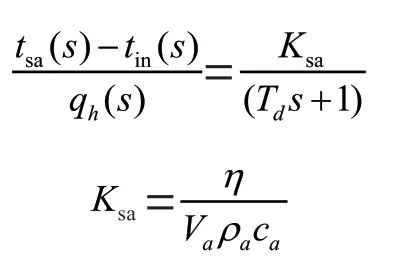
式中:為電加熱器加熱過程中溫度增益(℃/W);T為加熱過程的時間常數(s),通常在5 s 左右。
1.4 溫度傳感器的數學模型
溫度傳感器通常采用金屬外殼,其作用于空調系統檢測室內溫度、防過熱過冷保護、控制空調機組的運行。在空調自動控制系統中,溫度傳感器優先采用無套管型熱電偶型,其優點是熱慣性較小,能夠快速地接近冷熱媒的實際溫度,有利于提高系統調節精度,避免控制系統產生波浪形震蕩。
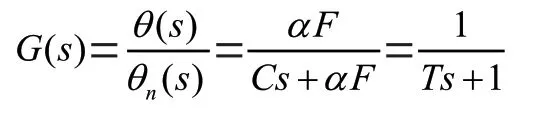
根據空氣熱力學原理,房間內空氣與溫度傳感器之間的熱量傳遞與傳感器熱量的變化相同,可得到溫度傳感器的能量傳遞平衡方程為:
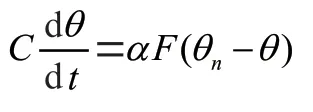
對方程進行拉普拉斯變換,可得溫度傳感器的數學模型傳遞函數為:
1.5 執行機構的數學模型
執行機構是空調控制系統的重要組成部分,是空調系統實現自動控制的“手腳”,其直接決定空調控制系統的調節質量。一般利用電動執行器控制冷熱媒的流量,利用電動風閥的打開角度調節空氣的流通量,從而達到調節房間內溫度和濕度的目的。
電動執行機構的流量特性大致分為線性、等百分比、快開和拋物線特性。本系統的數學建模選用在空調控制系統中普遍應用的線性流量特性。電動執行機構的數學模型總體傳遞函數可定義為基于線性分析的比例環節。
2 仿真實驗設計
2.1 空調系統的仿真模型
在建立的空調系統對象模型基礎上,平臺以省級重點實驗室——山東建筑大學智能建筑實驗室的中央空調為參照被控對象,通過系統建模和系統分析可得空調模型如下:
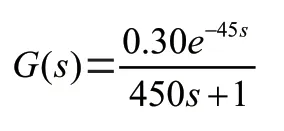
(1)房間模型。利用山東建筑大學智能建筑實驗室的房間為模型,房間面積120 m,長15 m,寬8 m,高3 m,空調末端盤管送風形式為側面,每天通風換氣次數取12,可得=45 s,=0.30,=450 s。由此經過機理法建模,經過計算以及查閱相關的參考文獻,確定房間的傳遞函數為:
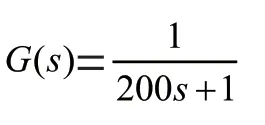
(2)表冷器模型。利用智能建筑實驗中全空氣空調實驗臺的表冷器為參照,假定工況為干工況下確定表冷器的模型傳遞函數為:
2.2 控制器的設計
在空調自動控制系統的教學中,PID 控制是最基本的控制,其控制原理是模糊控制器設計、神經網絡控制器設計、深度學習算法控制器設計的基礎,本系統重點對此闡述如下:
2.2.1 PID 控制器的基本原理
按偏差的比例、積分和微分線性組合進行控制的方式,稱為PID 控制。PID 控制器由于其結構簡單、調整方便、穩定性好、適應性強,可靠性高,在過程控制中得到廣泛應用。
2.2.2 PID 控制器的參數整定
以結果P<0.05定義為有顯著性差異,用均數±標準差表示計量資料并行t檢驗,用%表示計數資料并行x2檢驗,所有數據皆經SPSS 19.0軟件進行處理。
PID 控制需要根據被控對象適當地整定它的三個參數,才能獲得比較滿意的控制效果。當一個控制系統實際安裝完成后,系統各個環節以及被控對象各通道的特性就不能再改變了,而唯一能改變的就是調節器的參數,即調節器的比例系數、積分系數和微分系數。通過改變這三個參數的大小就可以改變控制器的性能,獲得較好的過渡過程和控制質量。調節器參數整定的目的就是按照已定的控制系統,求取控制系統質量最好的調節器參數。
2.2.3 控制器參數的傳遞
在本設計的虛擬實驗平臺中,由于實驗界面和實驗模型是獨立的,控制器參數的改變必須通過PCAuto 接口來設計,所以控制器的設計要留下參數傳遞的接口。Matlab 空間是一個參數中轉的平臺,PCAuto 前臺界面可以將設置好的控制器參數傳遞到Matlab 工作空間,然后控制器模型工作時會自動地從Matlab 空間中讀取相應的參數值。如圖2所示,用戶可以在前臺界面設計控制的參數,嘗試輸入各類型控制參數,從而得到不同的控制結果仿真。

圖2 數據傳遞原理圖
2.3 實驗模型文件的搭建
依據系統平臺建立的空調系統各環節模型,利用Maltab仿真軟件依次建立各實驗的模型文件。不同的實驗項目需要的實驗模型不同,在此以單回路PID 控制和串級控制回路說明實驗模型的構建。
(1)空調自動控制系統——單回路,如圖3所示;

圖3 單回路PID 控制Simulink 模型圖
(2)空調自動控制系統——串級控制,如圖4所示。
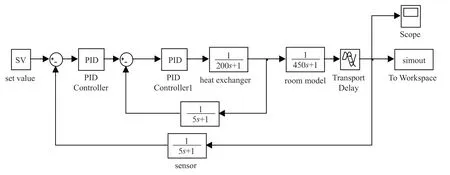
圖4 串級控制系統圖
2.4 基于B/S 結構的網絡虛擬實驗系統
隨著互聯網云技術的發展,B/S 網絡架構的虛擬實驗系統,得到了快速的構建,其結構組成如圖5所示。其最大的優點是使用人員不需要安裝任何客戶端APP,只需要一臺可以連接Internet 的計算機即可使用。在這種結構下,用戶工作界面是通過WWW 瀏覽器來實現,減少了客戶端的系統載荷,有利于系統的維護與升級。
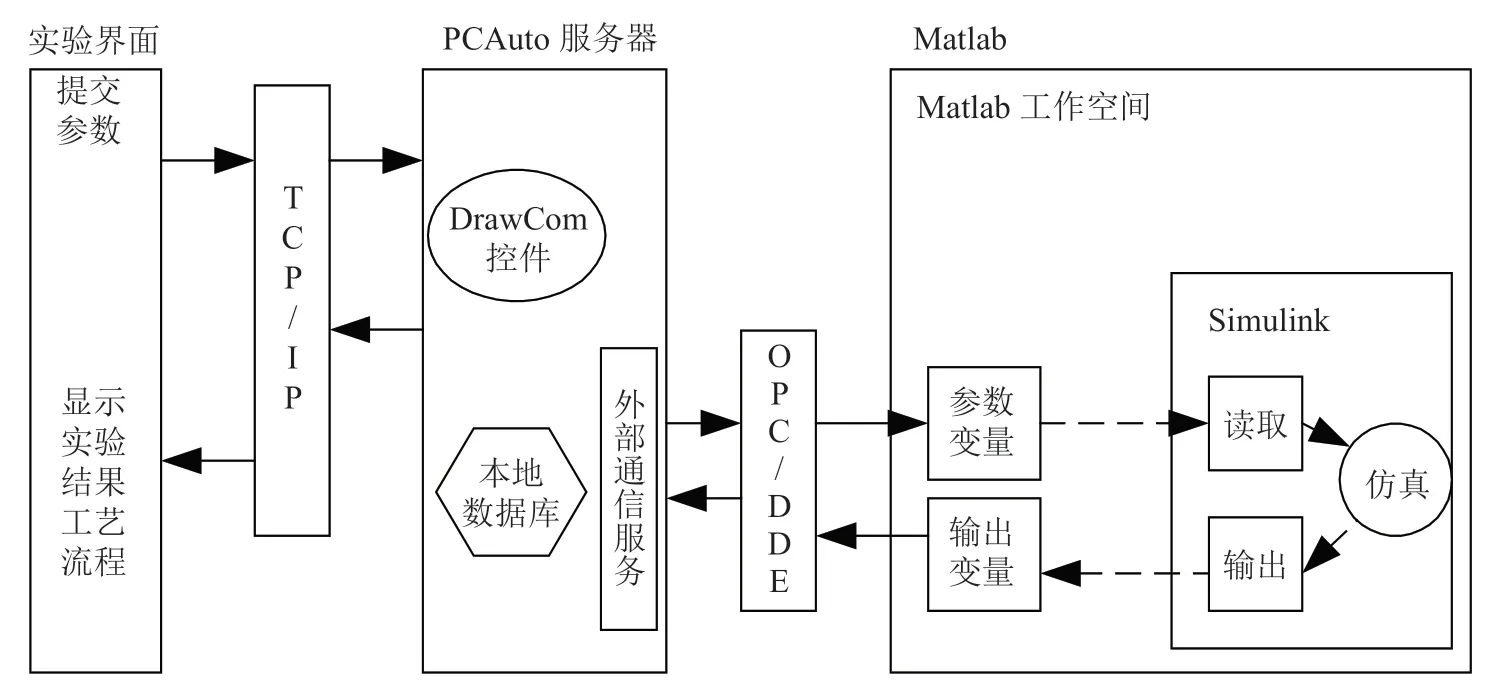
圖5 基于B/S 結構網絡虛擬實驗的結構
3 仿真實驗的實施及效果
3.1 仿真實驗實施步驟
傳統中央空調教學實驗是利用智能建筑實驗室內的空調機組,學員分組對空調的啟動、制冷等環節進行操作,實現在工況情況下對機組的控制,利用傳感器獲得房間溫濕度的變化曲線圖。實體實驗的主要目的是讓學生對空調系統的組成產生感觀認知,掌握空調各組成部分,為虛擬實驗中各數學模型的參數整定提供基礎知識。
3.1.2 實驗預習
實驗預習是學員根據課程理論的知識,基本掌握實驗基礎參數,學員可根據自我認知對被控參數進行假定。預習環節可讓學員更加明確實驗目的,對虛擬平臺的各組成部分和應用技巧進行熟悉,進而掌握正確的實驗方法。
3.1.3 虛擬實驗過程
學員通過實體實驗觀摩和預習環節后,已基本掌握空調自控系統的組成,進入虛擬實驗后,可按照實驗指導書要求對模型數據修改,完成設計內容要求,產生實驗結果。
3.1.4 實驗分析和總結
實驗結果分析,是對學員正確操作實驗的檢驗。空調自控系統虛擬仿真實驗可實現各設計參數的輸入,學員可掌握空調系統運行中各環節的模擬數據,在工況條件下,設計人輸入設計數值,獲得該數值對房間溫濕度的影響,更加深刻理解參數設定在工程設計中的作用,能夠判定系統設計參數的合理性,給出最優的設計方案。
實驗報告的生成和實驗過程的梳理總結,如圖6所示。
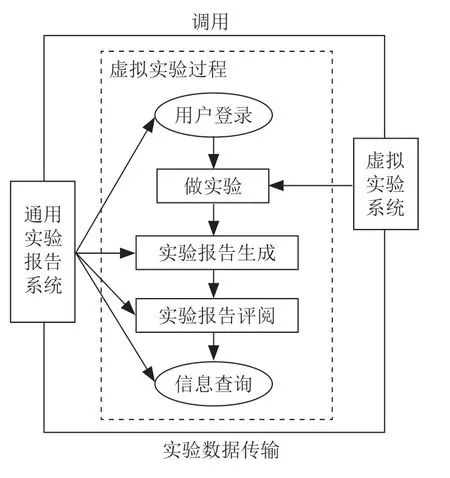
圖6 實驗報告系統結構圖
3.2 實驗效果
空調虛擬實驗平臺的使用與實體實驗教學的對比,虛擬仿真實驗可實現對空調控制理論的認知、理解和空調控制器設計,主要表現在以下幾個方面:
(1)提高空調自動控制規律的理解;
(2)強化不同設計方案的結果對比;
(3)提高教學效率;
(4)提高學習主動性;
(5)擴大實驗教學的外延。
除上述之外,空調自控系統虛擬仿真實驗平臺的研發的最大優點是讓學員不受時間、地點的限制完成空調自動控制實驗課程的學習,利用此平臺完成對空調自控理論知識進行復習和鞏固。
4 結 論
空調系統的各個環節復雜,理論建模無法準確描述其動態參數,這是空調系統的研究難點,但是作為空調系統的仿真教學研究,不必過分追求模型參數的準確性,只要保證控制規律準確可以達到實驗教學的目的。
空調自控系統虛擬實驗平臺的成功研發是虛擬仿真技術在樓宇自動化系統中的創新嘗試,其驗證了用戶可以在平臺下獲得實際教學的實驗效果,然后在虛擬實驗平臺的基礎上,構建了基于Internet 的網絡虛擬實驗,實現省重點實驗室內的資源共享,提升學員實驗教學效率,完善高等院校及網絡教學的空調自動控制實驗教學體系。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
甘肅教育(2020年4期)2020-09-11 07:42:36
物理之友(2020年12期)2020-07-16 05:39:20
甘肅教育(2020年8期)2020-06-11 06:10:04
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國教育技術裝備(2016年11期)2016-12-01 06:53:03
光學精密工程(2016年6期)2016-11-07 09:07:19
