便攜式異步電動機PLC調速控制實訓裝置的研制
2022-11-09 04:38:58李嘉豪
微型電腦應用 2022年10期
李嘉豪
(西安科技大學,電氣與控制工程學院, 陜西,西安 710054)
0 引言
“電氣控制與PLC應用技術”是電氣工程及其自動化專業(yè)的主干課程,同時也是一門實踐性很強的課程。由于傳統(tǒng)的PLC實訓平臺體積龐大,有一定的局限性,學生只能在實驗室進行課程實踐和實驗環(huán)節(jié)。因此,為進一步提高本課程的教學效果,急需研制方便學生使用的實訓裝置,學生可將該實訓裝置帶至圖書館、家里等場所進行實踐練習,適合實施以學生為主導的探索式學習。在課程實踐中需要學生自主設計整個實驗過程,完成硬件組合連接和軟件程序設計。通過實踐能夠使學生掌握常規(guī)低壓電器的工作原理,提高學生運用PLC的實操能力,加深對理論知識的理解。實訓裝置以三相異步電動機為被控對象,建立觸摸屏和PLC之間的通信,通過觸摸屏設計人機交互界面,實現(xiàn)對異步電動機轉速的調整[1-3]。
1 方案設計
“電氣控制與PLC應用技術”課程中異步電動機變速調節(jié)和PID調節(jié)是2個比較典型的實驗。新研制的實訓裝置應該具有異步電動機變速調節(jié)和PID調節(jié)2個實驗功能。總體結構采用西門子S7-200 SMART為主控制器,由觸摸屏設定電動機運行頻率,通過以太網(wǎng)通信將數(shù)據(jù)傳送至PLC,經(jīng)D/A轉換子程序處理后送至模擬量輸出模塊,再由模擬量輸出模塊將數(shù)據(jù)傳送至變頻器,從而完成頻率給定,實現(xiàn)電動機速度調節(jié);采用增量式旋轉編碼器對電動機速度進行采集,并將速度反饋給PLC實現(xiàn)速度閉環(huán)調節(jié);利用觸摸屏設計人機交互界面,與PLC進行通信,由上位機對電動機的運行頻率進行設定并實時監(jiān)測電動機轉速[4],其設計結構框圖如圖1所示。同時,為了方便學生使用,新研制的實訓裝置采用便攜式結構設計,將所有器件合理安裝在手提箱里,并配備漏電保護、過載和短路保護,保障人身安全和設備使用安全,具有靈活、可靠、安全等特點。
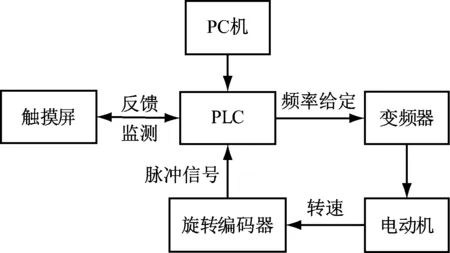
圖1 實訓裝置結構圖
2 實訓裝置硬件設計
2.1 硬件選型
根據(jù)實訓任務要求,PLC共需數(shù)字量4路輸入/2路輸出、1路模擬量輸出,本實訓裝置選擇西門子S7-200 SMART PLC,CPU ST20模塊+EM AE03模擬量轉換模塊;變頻器采用VFD-M變頻器,實現(xiàn)電動機正轉、反轉、變頻調速控制;增量式旋轉編碼器選擇HN3806-AB-400N,每圈輸出400個脈沖,該編碼器體積小、精度高;觸摸屏選用Samkoon,操作簡便、可視性好、可維護性強,可以用來顯示電機轉速、參數(shù)設定、監(jiān)控PLC運行狀態(tài)等。
S7-200 SMART PLC工作電源為直流24 V,故選擇AC 220 V轉DC 24 V開關電源供電,該電源安全、可靠;主回路電源通過空氣開關接入實訓裝置,對電路或電氣設備短路、嚴重過載及欠電壓等進行保護;交流接觸器的主觸頭可以通過大電流,故選擇交流接觸器作為異步電動機的控制器件;但交流接觸器不具有過電流保護功能,需配備熱繼電器使用以實現(xiàn)電動機的過載保護,其體積小、結構簡單,靈敏度高。裝置硬件選型如表1所示。

表1 裝置硬件選型
2.2 硬件電路設計
實訓裝置硬件接線原理圖如圖2所示,對其中的主要部分進行說明如下。
2.2.1 PLC
S7-200 SMART PLC采用24 V直流電源供電,L+、1M接+24 V,M接0 V;I/O地址分配如表2所示。旋轉編碼器增量脈沖由I0.0、I0.1輸入,I0.2、I0.3分別接電動機正轉、反轉控制按鈕,Q0.0、Q0.1控制中間繼電器KA1、KA2線圈得電來控制變頻器正、反轉輸入端子M0、M1。

表2 I/O地址分配表
2.2.2 旋轉編碼器
連接旋轉編碼器與PLC之前,第一步先選擇PLC的高速計數(shù)器外部輸入信號和工作模式。根據(jù)PLC的輸入點確定高速計數(shù)HSC0,旋轉編碼器為AB正交相輸出,工作模式為10模式。旋轉編碼器的電源、0 V端口分別接至PLC的L+和M端口,編碼器的脈沖輸出OUTA、OUTB接至PLC的I0.0和I0.1端口。
2.2.3 變頻器
隔離開關QS控制變頻器的工作電源,中間繼電器KA1、KA2的常開觸點分別接變頻器數(shù)字量輸入端M0、M1控制異步電動機正轉、反轉,PLC的EM AM03模擬量輸出端0、0M分別接變頻器模擬量輸入控制端口AVI、GND,變頻器的U、V、W三相輸出經(jīng)交流接觸器的主觸點接三相異步電動機。
2.2.4 控制回路
控制回路中,首先接熱繼電器的常閉觸點,實現(xiàn)電動機的過載保護;SB1為停止按鈕,接常閉觸點;SB2為啟動按鈕,接常開觸點;交流接觸器的常開輔助觸點與SB2并聯(lián),實現(xiàn)互鎖;最后串聯(lián)交流接觸器的線圈,完成控制回路的設計。
3 軟件設計
系統(tǒng)的軟件設計語言使用梯形圖,需配備西門子S7-200 SMART編譯軟件(STEP 7 MicroWIN SMART V2.4)。該編譯軟件有先進的程序結構、靈活方便的尋址方法、強大的通信功能、簡化復雜任務的向導和庫、PID參數(shù)自整定功能等。學生根據(jù)控制要求,編寫梯形圖程序,實現(xiàn)相應的功能。
3.1 主程序設計
在主程序設計中需要先對PLC內(nèi)部寄存器進行初始化,初始化完成后將觸摸屏給定的頻率轉換為0~27 648的數(shù)字量,再對該數(shù)字量進行D/A轉換,轉換為0~10 V的電壓信號;變頻器接收電壓信號并輸出相應的頻率使電動機運轉;利用增量式旋轉編碼器采集脈沖量并調用高速計數(shù)器子程序計算電動機轉速;得到電動機轉速調用PID子程序,經(jīng)PID算法修改D/A模塊輸出值,判斷實際轉速是否與目標轉速相等,若相等則結束主程序,若不等則返回PID子程序,經(jīng)算法修改D/A模塊輸出值,構成一個完整的閉環(huán)控制系統(tǒng)[5-8]。主程序流程圖如圖3所示。

圖2 實訓裝置硬件接線原理圖

圖3 主程序流程圖
3.2 子程序設計
在子程序設計中,首先對高速計數(shù)器進行初始化;然后啟動定時中斷進入中斷子程序。在中斷子程序中記錄100 ms內(nèi)高速計數(shù)器的脈沖數(shù)并計算電動機的轉速;算出電動機轉速后中斷返回并進入PID子程序,獲取轉速差并通過PID算法計算轉速增量,根據(jù)增量修改D/A模塊值,通過比較實際轉速與目標轉速是否相等來決定D/A模塊的輸出;若相等,則D/A模塊輸出值保持不變,并進一步判斷轉速是否穩(wěn)定,若不穩(wěn)定,返回修改PID參數(shù)。子程序流程圖如圖4所示。

圖4 子程序流程圖
4 實驗調試與分析
學生通過新研制的實訓裝置需要自行完成硬件電路的搭建、變頻器參數(shù)設定、觸摸屏畫面設計、軟件編程、PID參數(shù)整定等來實現(xiàn)異步電動機變速調節(jié)和PID調節(jié)2個實驗。
4.1 硬件搭建
參考硬件接線原理圖完成實訓裝置硬件的搭建,實物如圖5所示,各元器件布局合理、符合規(guī)范。變頻器安裝在左上角,與PLC保持一定的距離,減小PLC在變頻器使用過程中產(chǎn)生電磁場的干擾;PLC安裝在導軌上,確保安全穩(wěn)固;觸摸屏安裝在箱蓋上,可操作性強。通過硬件的搭建,學生可掌握常規(guī)低壓電器的工作原理及使用。

圖5 硬件實物圖
4.2 變頻器參數(shù)設定
首先需對變頻器參數(shù)進行設置,按變頻器控制面板“MODE”按鈕,顯示P00(主頻率輸入來源設定);按變頻器控制面板“ENTER”按鈕,顯示“00”(查找手冊設置主頻率的來源)。本實驗中設定為“01”(主頻率輸入由模擬信號0~10 V輸入),按“ENTER”按鈕,再次進入“P00”;按上、下選擇按鈕,顯示P01(運行信號來源設定);按“ENTER”按鈕,顯示“00”(查找手冊運行信號的來源)。本實驗中設定為“00”(通過上、下按鈕改變參數(shù)),按“ENTER”按鈕(表示確定,參數(shù)設置成功);按“MODE”按鈕,直至回到頻率界面。通過變頻器參數(shù)的設定,學生可掌握變頻器的調試及使用方法。
4.3 觸摸屏設計
創(chuàng)建一個新的項目,選擇菜單欄下的網(wǎng)絡,雙擊SIEMENS網(wǎng)絡設定通信協(xié)議,制造商選擇SIEMENS,系列選擇對應的S7-200 SMART,IP地址要與PLC的IP地址相同,否則通信不成功。設置完成后在主界面根據(jù)實驗要求設計監(jiān)控界面,觸摸屏控制界面如圖6所示。通過該過程,學生可掌握人機交互界面的設計、觸摸屏和PLC的通信,為設計更復雜的自動化控制系統(tǒng)打下基礎。

圖6 觸摸屏控制界面
4.4 實驗測試及分析
異步電動機變速調節(jié)實驗中,通過觸摸屏設定異步電動機的不同運行頻率,觀察電動機的實際轉速變化,測試結果如表3所示。通過該過程,學生可進一步加深對PLC模擬量控制的理解。

表3 改變頻率值測試結果
PID調節(jié)實驗中,需要對PID參數(shù)KP、KI、KD進行調節(jié),使電動機能夠穩(wěn)定在目標轉速周圍,具體調節(jié)過程:初始設定KP為較大的值,KI、KD設置為0,觀察速度變化情況,當出現(xiàn)振蕩時,記錄此時的系數(shù)值;接下來調節(jié)KI,設定一個初始值,當擺動在目標值附近單一輪回且恢復慢時,適當減小KI,當擺動在目標位置多次來回波動,加大KI;最后設置KD,偏離目標值大且恢復慢,加大KD,單位時間內(nèi)偏離目標角度誤差不大,但振蕩頻繁,則減小KD。PID調試測試結果如表4所示。

表4 PID調節(jié)測試結果
實驗過程總結:通過硬件電路搭建、變頻器參數(shù)設定、觸摸屏設計、PID參數(shù)整定等具體的實驗過程,學生可掌握常規(guī)低壓電器的工作原理、變頻器的使用、人機交互界面的設計、PLC模擬量控制、PID參數(shù)調試及自動化控制系統(tǒng)的構成。
5 總結
本實訓裝置將觸摸屏、PLC、變頻器、編碼器和三相異步電動機組建成一套完整的電動機調速系統(tǒng)。學生通過本實訓裝置可完成異步電動機的變速調節(jié)和PID調節(jié)2個實驗,進一步加深對PLC控制技術的理解,并能夠更深層次地掌握PID控制的相關理論和調試方法;同時采用便攜式結構設計,方便學生自行學習和實訓,為理論教學與實踐教學相結合提供了很好的支撐。
猜你喜歡
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2025年8期)2025-08-23 00:00:00
中學生天地(A版)(2022年10期)2022-11-23 06:42:50
防爆電機(2020年3期)2020-11-06 09:07:42
裝備制造技術(2020年12期)2020-05-22 09:25:38
測控技術(2018年5期)2018-12-09 09:04:50
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年7期)2017-06-05 09:36:13
信息記錄材料(2016年4期)2016-03-11 15:22:54
商業(yè)評論(2014年9期)2015-02-28 04:32:41
自動化博覽(2014年12期)2014-02-28 22:34:39
