數(shù)據(jù)驅(qū)動的城市路網(wǎng)短時交通流預(yù)測
2022-11-10 09:02:26唐進君段一鑫
唐進君 曾 捷 段一鑫
(中南大學(xué)交通運輸工程學(xué)院 長沙 410075)
0 引 言
交通流預(yù)測的對象包括流量、速度、占有率,以及行程時間等交通參數(shù).按照數(shù)據(jù)采樣間隔及預(yù)測時長來劃分,可分為長期預(yù)測與短時預(yù)測兩種類型.其中,短時交通流預(yù)測的數(shù)據(jù)采樣及預(yù)測步長主要為2,5,10 min等;而長期交通流預(yù)測普遍按照h、d、月及更長間隔等作為采樣間隔來統(tǒng)計交通流數(shù)據(jù),進而預(yù)測其未來變化情況.短時交通流預(yù)測是ITS中諸多實時應(yīng)用的基礎(chǔ),能夠在緩解交通擁堵、動態(tài)路徑規(guī)劃,以及信號配時優(yōu)化等方面發(fā)揮重要作用.
根據(jù)所預(yù)測的道路類型來進行分類,短時交通流預(yù)測可以分為高速公路交通流預(yù)測和城市道路交通流預(yù)測兩種類型.其中,相較于高速公路交通流預(yù)測而言,城市道路交通流所服務(wù)的出行者范圍更廣,路網(wǎng)中各路段之間的連通性更強,交通狀態(tài)檢測設(shè)備更為豐富,因此在交管部門的實時管理中具有廣闊的應(yīng)用前景.同時,由于城市路網(wǎng)中存在著信號設(shè)備的固定控制,會對交通流產(chǎn)生周期性的間斷作用,導(dǎo)致其在短時內(nèi)具有更為強烈的波動性,從而給準確的短時預(yù)測帶來了極大的挑戰(zhàn).
本文立足于大數(shù)據(jù)背景下的城市道路交通流預(yù)測,根據(jù)預(yù)測對象的空間維度將現(xiàn)有研究劃分為單節(jié)點交通流預(yù)測及路網(wǎng)級交通流預(yù)測,研究范圍涵蓋統(tǒng)計學(xué)模型、機器學(xué)習(xí)模型、傳統(tǒng)深度學(xué)習(xí)模型及新穎的圖神經(jīng)網(wǎng)絡(luò)模型.基于現(xiàn)有預(yù)測方法及預(yù)測模式,總結(jié)了現(xiàn)有研究中存在的不足,并指出了未來的研究熱點及進展.
1 研究現(xiàn)狀
1.1 單節(jié)點交通流預(yù)測
將路段、檢測器等交通流狀態(tài)采集地點定義為路網(wǎng)中的節(jié)點.單節(jié)點交通流預(yù)測是指基于單個節(jié)點(即路段或檢測器)或其周圍多個節(jié)點的歷史交通流信息來預(yù)測單個節(jié)點的未來交通狀態(tài).其中,又可以根據(jù)所使用到的周圍節(jié)點的數(shù)量來將這種預(yù)測模式進一步劃分為:考慮交通流時變特征的預(yù)測方法與考慮空間相關(guān)性的預(yù)測方法.前者僅使用到了目標節(jié)點的歷史交通流數(shù)據(jù),而后者則引入了與目標節(jié)點具有較強相關(guān)性(包括相關(guān)性系數(shù)以及上下游影響等)的節(jié)點的歷史交通數(shù)據(jù).
1.1.1考慮交通流時變特征的預(yù)測方法
交通狀態(tài)的時間關(guān)聯(lián)性是交通流預(yù)測中最為重要的影響因素之一.圖1以長沙市某交叉路口2019年7月期間交通流數(shù)據(jù)為例,進行交通流周期相似性分析.從時間維度來看,交通流的時間關(guān)聯(lián)性包括短時相關(guān)性、日相似性、周相似性等.為了充分挖掘交通流的時變特征,學(xué)者們廣泛應(yīng)用統(tǒng)計學(xué)方法、機器學(xué)習(xí)方法及部分深度學(xué)習(xí)方法(主要為循環(huán)神經(jīng)網(wǎng)絡(luò)及其變體)來探索交通流的時間相關(guān)性.
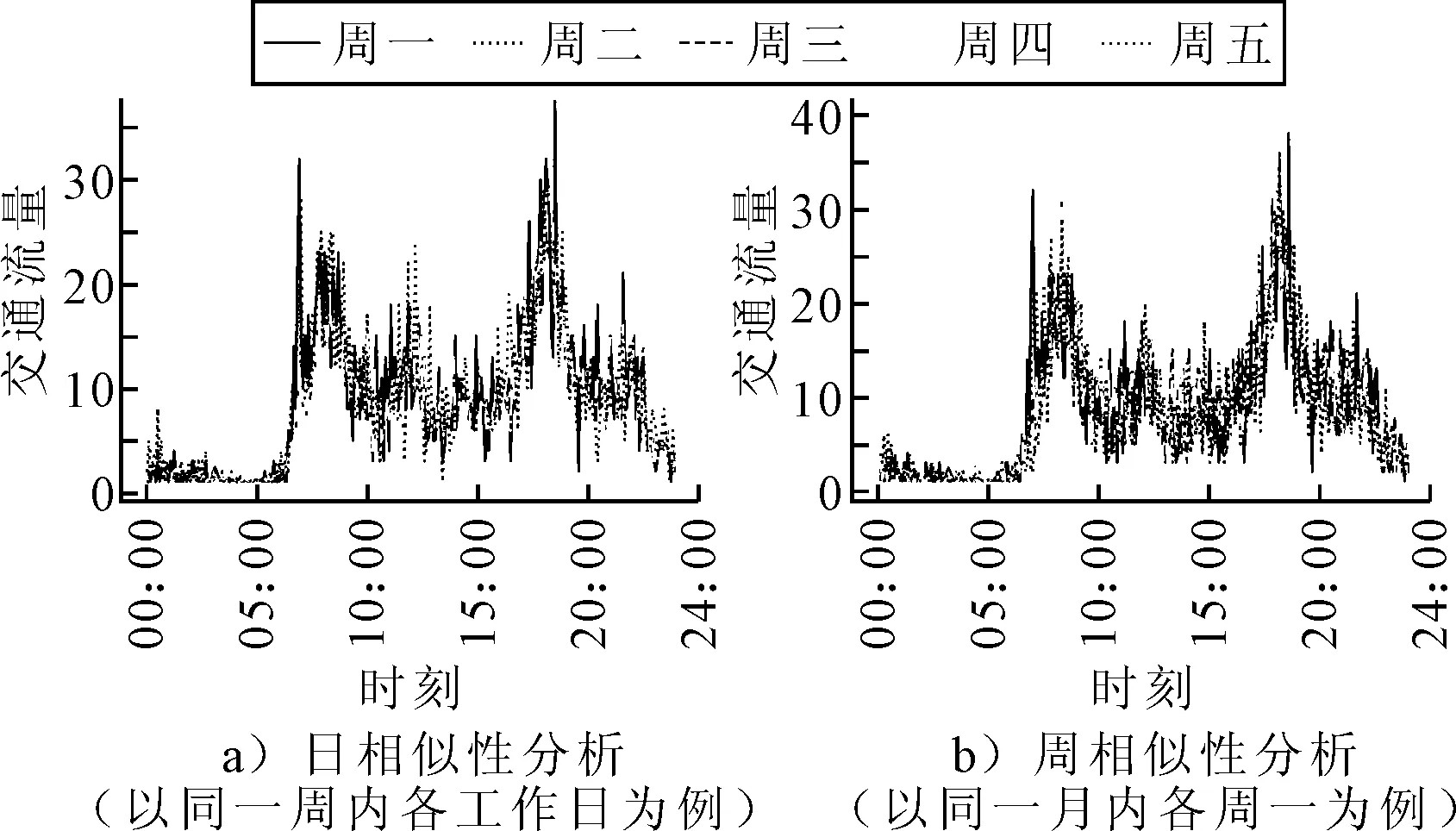
圖1 交通流時變特征分析
當(dāng)僅考慮交通流時變特征時,預(yù)測模式可以概括為:假設(shè)xt={xt-p+1,xt-p+2,…,xt}為t時刻的輸入向量;xt為t時刻的交通流數(shù)據(jù),旨在從歷史數(shù)據(jù)庫中學(xué)習(xí)或計算得到一個映射函數(shù)F(·),從而能夠預(yù)測得到t+q時刻的交通流參數(shù).
(1)
1) 基于統(tǒng)計學(xué)的預(yù)測方法 統(tǒng)計學(xué)方法通常將單個節(jié)點的交通流數(shù)據(jù)視為序列數(shù)據(jù),從而使用時間序列分析方法進行預(yù)測.在所有的統(tǒng)計學(xué)方法,差分整合移動平均自回歸模型(autoregressive integrated moving average, ARIMA)及其變體是短時交通流預(yù)測領(lǐng)域中應(yīng)用最為廣泛的時間序列分析方法.同時,其他的時間序列分析模型,如卡爾曼濾波(Kalman-filter)、廣義自回歸條件異方差模型(generalized autoregressive conditional heteroskedasticity model, GRACH)等,也都在這一領(lǐng)域中得到了廣泛的應(yīng)用.韓超等[1]基于ARIMA模型提出了一種自適應(yīng)預(yù)測算法,在仿真數(shù)據(jù)上的預(yù)測結(jié)果表明:該模型在不同的交通流狀態(tài)下均能取得較為準確的預(yù)測效果.李文勇等[2]提出了一種結(jié)合Box-Cox指數(shù)變換與ARIMA的改進模型,能夠有效解決由交通流的長期自相關(guān)所產(chǎn)生的異方差性.薛潔妮等[3]提出了一種基于混沌時間序列分析方法的短時交通流預(yù)測模型,通過相空間重構(gòu)、局部多項式擬合等操作來實現(xiàn)準確預(yù)測.實驗結(jié)果表明:該方法既能夠保證一定的預(yù)測準確性,同時還能滿足實時應(yīng)用的需求.Min等[4]將時空ARIMA模型與動態(tài)轉(zhuǎn)向率預(yù)測模型相結(jié)合,設(shè)計了一種名為動態(tài)時空ARIMA的預(yù)測框架,用于提升城市交叉口處交通流預(yù)測的準確性與預(yù)測效率.Li等[5]提出了一種基于偏最小二乘回歸(partial least square, PLS)的預(yù)測模型,該模型能夠有效兼顧預(yù)測準確性與運算效率,并且具有較強的可解釋性.
然而,雖然這些基于統(tǒng)計學(xué)方法的預(yù)測模型能夠給短時交通流預(yù)測任務(wù)帶來更強的可解釋性,但是往往在探索交通時序數(shù)據(jù)的復(fù)雜非線性關(guān)系中具有局限性,并且存在著計算復(fù)雜度高的缺點.在如今大數(shù)據(jù)時代的交通系統(tǒng)中,難以取得較好的預(yù)測效果.
2) 基于機器學(xué)習(xí)的預(yù)測方法 為了緩解這些基于統(tǒng)計學(xué)模型中所存在的不足,將機器學(xué)習(xí)模型用于短時交通流預(yù)測研究,模型包括人工神經(jīng)網(wǎng)絡(luò)(artificial neural networks, ANN)、支持向量機(support vector machines, SVM)、決策樹(decision trees)及貝葉斯網(wǎng)絡(luò)(Bayesian networks)等.Tang等[6]在充分考慮交通流時間序列的周期性特征的基礎(chǔ)上,通過將無監(jiān)督學(xué)習(xí)與監(jiān)督學(xué)習(xí)相結(jié)合的方式,提出了一種改進的模糊神經(jīng)網(wǎng)絡(luò)(fuzzy neural network, FNN)結(jié)構(gòu),用于城市道路短時速度預(yù)測.此后,考慮到交通流時間序列的波動性,Tang等[7]引入了一種數(shù)據(jù)降噪方法來緩解交通流的波動性,并將降噪結(jié)果輸入SVM模型來實現(xiàn)準確預(yù)測.同時,為了進一步提升機器學(xué)習(xí)模型的預(yù)測效果,避免模型參數(shù)在訓(xùn)練過程中陷入局部最優(yōu)解,大量的學(xué)者引入了啟發(fā)式算法來優(yōu)化機器學(xué)習(xí)模型的有關(guān)參數(shù).姚智勝[8]提出了一種基于最小二乘支持向量機回歸算法的短時交通流預(yù)測模型,并將遺傳算法與回溯系數(shù)選擇過程相結(jié)合用于模型最佳參數(shù)選擇.李松等[9]在BP神經(jīng)網(wǎng)絡(luò)的基礎(chǔ)上引入了一種改進粒子群算法,從而利用粒子群算法來對于神經(jīng)網(wǎng)絡(luò)中的權(quán)重進行優(yōu)化,有助于提升模型的預(yù)測準確性.
在傳統(tǒng)的機器學(xué)習(xí)模型中,普遍缺乏能夠有效處理時間序列數(shù)據(jù)的模塊,從而導(dǎo)致其對時間序列特征的學(xué)習(xí)能力存在不足.同時,機器學(xué)習(xí)模型往往需要在數(shù)據(jù)預(yù)處理階段人為設(shè)定一系列特征工程,而非直接通過模型對于數(shù)據(jù)特征進行挖掘.因此,當(dāng)面臨體量龐大且多源異構(gòu)的交通流數(shù)據(jù)時,傳統(tǒng)的機器學(xué)習(xí)模型難以取得滿意的預(yù)測效果.
3) 基于深度學(xué)習(xí)的預(yù)測方法 應(yīng)用于短時交通流時變特征挖掘及預(yù)測領(lǐng)域的深度學(xué)習(xí)模型主要為循環(huán)神經(jīng)網(wǎng)絡(luò)(recurrent neural network, RNN)及其變體長短時記憶網(wǎng)絡(luò)(long short-term memory, LSTM)和門控循環(huán)單元(gated recurrent unit, GRU).LSTM是目前RNN及其變體中應(yīng)用最為廣泛的模型,其模型結(jié)構(gòu)見圖2.該模型的主要組成部分包括:輸入門(input gate)、遺忘門(forget gate)、輸出門(output gate)及記憶單元(memory cell).在模型的計算過程中,能夠利用輸入門來獲取當(dāng)前時刻的交通狀態(tài),并且通過遺忘門來保留歷史交通信息,從而提升了模型處理時間序列的能力.

圖2 LSTM模型結(jié)構(gòu)圖
Ma等[10]首次將LSTM應(yīng)用于短時交通流預(yù)測領(lǐng)域,實驗結(jié)果證明了LSTM能夠取得明顯優(yōu)于傳統(tǒng)的機器學(xué)習(xí)模型以及統(tǒng)計學(xué)模型的預(yù)測效果.Ma等[11]提出了一種結(jié)合時間序列分析方法與LSTM-雙向LSTM的短時交通流預(yù)測方法.實驗結(jié)果表明:相較于基礎(chǔ)的LSTM模型及雙向LSTM模型而言,該組合模型能夠在預(yù)測穩(wěn)定性和準確性上均取得一定的提升.Gu等[12]利用貝葉斯方法設(shè)計了一種由GRU、ARIMA,以及徑向基網(wǎng)絡(luò)組成的預(yù)測框架,從而能夠在面臨不同交通狀態(tài)時使用更為合適的模型進行預(yù)測.Peng等[13]構(gòu)建了一種結(jié)合注意力機制與LSTM的ALSTM模型結(jié)構(gòu),實驗結(jié)果表明:所使用到的注意力機制能夠有效提升LSTM對時間序列特征的學(xué)習(xí)能力.陸文琦等[14]在利用集成經(jīng)驗?zāi)B(tài)分解(empirical mode decomposition, EMD)方法處理原始交通速度數(shù)據(jù)的基礎(chǔ)上,設(shè)計了一種結(jié)合雙向LSTM及注意力機制的混合深度學(xué)習(xí)模型,實現(xiàn)了車道級交通速度的準確預(yù)測.張煒健[15]立足于軌跡數(shù)據(jù)分析,利用EMD算法處理高頻噪聲數(shù)據(jù),并利用GRU模型實現(xiàn)交叉口處轉(zhuǎn)向流量預(yù)測.但是,在路網(wǎng)中行駛的車輛總是會在一定時間內(nèi)連續(xù)通過若干個路段,因此會給路網(wǎng)中不同位置的交通狀態(tài)之間帶來空間關(guān)聯(lián)性.然而,在這些基于RNN及其變體的交通流預(yù)測模型中,往往忽略了不同空間位置的交通流之間的交互性.因此,其預(yù)測效果往往受到限制,并且容易在多步預(yù)測任務(wù)中產(chǎn)生較大的預(yù)測誤差.
1.1.2考慮空間相關(guān)性的預(yù)測方法

(2)
從預(yù)測原理上看,開展相關(guān)聯(lián)節(jié)點的有效識別是此類預(yù)測方法的關(guān)鍵.根據(jù)節(jié)點相關(guān)性度量的原理,可以將現(xiàn)有研究劃分為經(jīng)驗定義方法以及數(shù)據(jù)驅(qū)動方法兩大類.
經(jīng)驗定義方法可以總結(jié)為:根據(jù)各節(jié)點在路網(wǎng)中的上下游關(guān)系,來確定各節(jié)點之間的關(guān)聯(lián)性,該方法的示意圖見圖3.Yao等[16]提出了一種基于時間參數(shù)與空間參數(shù)的SVM模型,用于城市道路的短時速度預(yù)測研究.劉曉玲等[17]的研究表明,SVM模型在同時考慮目標路段及其下游路段的交通狀態(tài)時,能夠在短時交通流預(yù)測任務(wù)中取得更為準確的預(yù)測效果.韓衛(wèi)國等[18]在利用時空ARIMA模型進行短時交通流預(yù)測的過程中發(fā)現(xiàn),當(dāng)同時引入目標交叉口以及其相鄰交叉口的交通流時間序列數(shù)據(jù)時,模型的預(yù)測準確性能夠取得大幅提升.王祥雪等[19]通過運用交通流時空關(guān)聯(lián)性開展了交通流時間序列重構(gòu),并提出了一種結(jié)合LSTM與RNN的深度學(xué)習(xí)模型,用于城市快速路短時交通流預(yù)測.楊春霞等[20]設(shè)計了一種融合上下游關(guān)系與LSTM的短時交通流預(yù)測模型,并提出了一種基于嶺回歸算法的權(quán)重計算方法,從而得到最終的預(yù)測值.
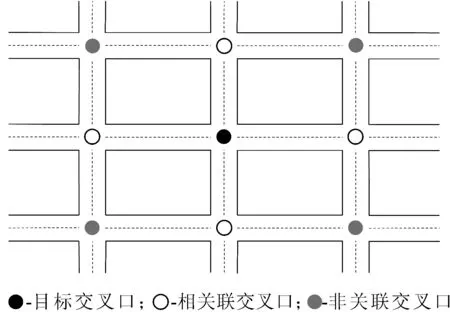
圖3 基于上、下游鄰接關(guān)系的相關(guān)聯(lián)交叉口識別示意圖
而數(shù)據(jù)驅(qū)動的方法的原理可以概括為:基于歷史交通流數(shù)據(jù)庫,利用相關(guān)系數(shù)等方法來定量刻畫節(jié)點之間的關(guān)聯(lián)性,進而為目標節(jié)點選取關(guān)聯(lián)性最強的若干個節(jié)點.Li等[21]設(shè)計了一種基于貝葉斯網(wǎng)絡(luò)的交通流預(yù)測框架,并選取了Graphical Lasso方法、空間鄰近準則以及相關(guān)系數(shù)方法來進行關(guān)聯(lián)路段選取.Gu等[22]在城市道路車道級速度預(yù)測中引入了灰色關(guān)聯(lián)分析來識別出與目標車道關(guān)聯(lián)性較強的車道,并設(shè)計了一種結(jié)合LSTM與GRU的堆疊模型開展短時速度預(yù)測.Tang等[23]通過融合交通流時間序列的統(tǒng)計學(xué)相關(guān)性以及路網(wǎng)交通特征,進行相關(guān)聯(lián)的交叉口進口道識別,并引入了一種結(jié)合遺傳算法與LSTM的GA-LSTM模型來開展進口道級短時流量預(yù)測.
大量研究表明:引入空間關(guān)聯(lián)性的模型能夠取得更為準確的預(yù)測效果.但是,由于其往往僅用于預(yù)測單個節(jié)點的未來交通狀態(tài),因此難以在短時內(nèi)為交通網(wǎng)絡(luò)的實時應(yīng)用管理提供足夠的有效信息.同時,考慮到此類預(yù)測模型需要針對于每個節(jié)點分別進行模型訓(xùn)練,因此當(dāng)路網(wǎng)規(guī)模擴大時,模型的訓(xùn)練開銷與存儲開銷會呈現(xiàn)線性上升的趨勢,導(dǎo)致其實用性大幅下降.
1.2 路網(wǎng)級交通流預(yù)測
1.2.1基于卷積神經(jīng)網(wǎng)絡(luò)的預(yù)測方法
由于卷積神經(jīng)網(wǎng)絡(luò)(convolutional neural network, CNN)能夠有效挖掘圖片中各像素點之間的關(guān)聯(lián)性,因此已有大量學(xué)者將其引入路網(wǎng)級交通流預(yù)測研究中.同時,一些特殊的CNN結(jié)構(gòu),如Conv1D、時間卷積網(wǎng)絡(luò)(temporal convolutional network, TCN)等,也能夠被直接用于單點交通流預(yù)測中.一般而言,基于CNN的交通流預(yù)測方法首先需要構(gòu)建柵格結(jié)構(gòu)的歷史交通流數(shù)據(jù),進而利用CNN來挖掘各柵格之間的時空關(guān)聯(lián)性.在現(xiàn)有短時交通流預(yù)測研究中,柵格構(gòu)建方法可以分為三種類型.
1) 將柵格化處理以后的城區(qū)視為圖片,具體構(gòu)建方法見圖4.蒲悅逸等[24]設(shè)計了一種基于端到端(End to End)框架的交通流預(yù)測模型,在對城市區(qū)域進行柵格化處理的基礎(chǔ)上,分別利用ResNet以及LSTM探索交通流的時空關(guān)聯(lián)性,并通過實例分析證明了該模型不僅能夠取得更為準確的預(yù)測效果,還能夠有效減少模型參數(shù).Zheng等[25]將廈門市進行規(guī)則網(wǎng)格劃分,并提出了一種名為DeepSTD的端到端學(xué)習(xí)框架來進行全市范圍內(nèi)的交通流預(yù)測.Zhang等[26]在將城區(qū)進行網(wǎng)格劃分的基礎(chǔ)上,設(shè)計了一種名為ST-ResNet的預(yù)測模型,來對于各區(qū)域的進、出交通量進行預(yù)測.在此基礎(chǔ)上,Zhang等[27]進一步考慮了區(qū)域內(nèi)部交通量與區(qū)域間OD交通量的協(xié)同性,構(gòu)建了一個多任務(wù)深度學(xué)習(xí)模型來實現(xiàn)二者的協(xié)同預(yù)測.Liu等[28]基于ConvLSTM模型構(gòu)建了一種名為Attentive Traffic Flow Machine的交通狀態(tài)預(yù)測模型,其中所使用到的ConvLSTM是一種結(jié)合CNN與LSTM運算機制的混合模型,能夠有效提取柵格化數(shù)據(jù)的時變特征.
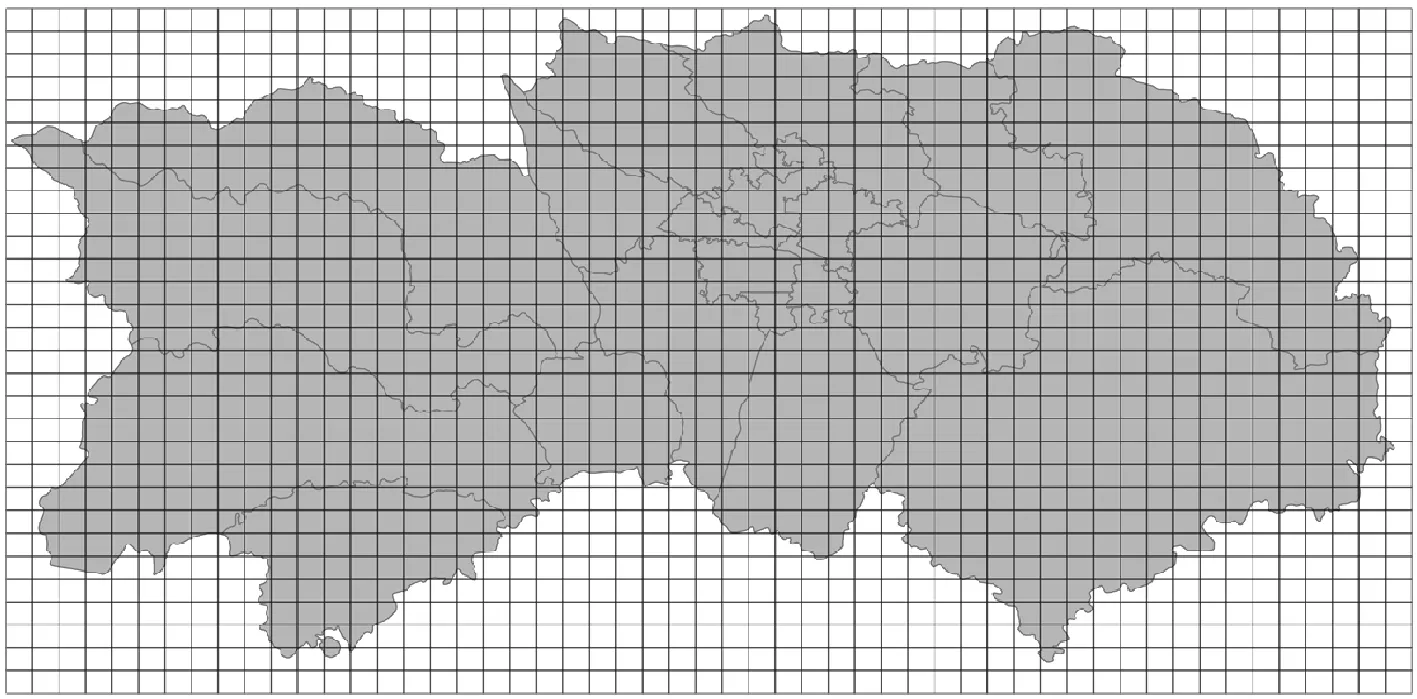
圖4 基于柵格化處理的網(wǎng)格數(shù)據(jù)構(gòu)建方法
2) 將路網(wǎng)中各節(jié)點按照一定的排列規(guī)律排列為二維空間矩陣形式,其構(gòu)建示意圖參見圖5.Dai等[29]為了使用CNN在高速公路網(wǎng)絡(luò)上開展短時交通流預(yù)測,提出了一種檢測器排列算法,從而將高速公路網(wǎng)絡(luò)中的各檢測器按照一定的規(guī)律排列為二維矩陣形式,便于使用CNN進行預(yù)測.
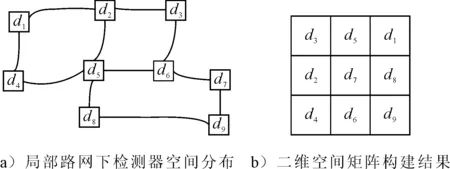
圖5 檢測器網(wǎng)絡(luò)的二維空間矩陣轉(zhuǎn)化過程示意圖
3) 將由所有節(jié)點在同一時刻構(gòu)成的交通流數(shù)據(jù)按照一定規(guī)則排列為向量,進而將各時刻的向量按照時間先后順序堆疊為二維矩陣形式.其中,該矩陣的行(或列)表征節(jié)點數(shù)量,矩陣另一維度表示先前時間步的長度.Ma等[30]構(gòu)建了一種二維時空速度矩陣,并設(shè)計了一種CNN模型用于提取網(wǎng)絡(luò)級交通流數(shù)據(jù)中的時空關(guān)聯(lián)性.陳思曲等[31]利用時空關(guān)系將交通速度數(shù)據(jù)轉(zhuǎn)化為二維矩陣形式,并設(shè)計了深度CNN模型開展行程速度預(yù)測研究.此外,唐克雙等[32]在構(gòu)建二維行程速度矩陣的基礎(chǔ)上,設(shè)計了一種基于Inception框架的CNN模型,用于城市快速路速度預(yù)測.
雖然基于CNN的預(yù)測方法已經(jīng)吸引了大量學(xué)者的關(guān)注,但是這三種柵格化數(shù)據(jù)構(gòu)建方法在實際應(yīng)用的過程中也面臨著一些需要解決的問題.例如,對于第一種構(gòu)建方法而言,在柵格劃分的過程中會面臨一大難題,即柵格的大小設(shè)置.如果柵格過大,則難以獲取得到精細化的城市交通狀態(tài);而一旦柵格尺寸過小,則可能產(chǎn)生大量的交通數(shù)據(jù)缺失的柵格,從而給準確預(yù)測帶來挑戰(zhàn).而對于第二、三種構(gòu)建方法而言,則需要設(shè)計出一種合適的排列規(guī)則,用于將節(jié)點排列為合理的一維向量或二維矩陣形式.同時,在這些基于網(wǎng)格劃分的預(yù)測方法中,所使用到的CNN模型普遍難以處理非歐幾里得空間數(shù)據(jù),因此路網(wǎng)的拓撲結(jié)構(gòu)往往遭到了忽視,導(dǎo)致難以深入地挖掘路網(wǎng)內(nèi)部的空間關(guān)聯(lián)性.
1.2.2基于圖神經(jīng)網(wǎng)絡(luò)的預(yù)測方法
由于城市路網(wǎng)具有天然的拓撲結(jié)構(gòu),因此近幾年來大量學(xué)者應(yīng)用了圖神經(jīng)網(wǎng)絡(luò)(graph neural network, GNN)來實現(xiàn)路網(wǎng)級預(yù)測.其中,使用最為廣泛的預(yù)測模型為圖卷積神經(jīng)網(wǎng)絡(luò)(graph convolutional network, GCN),同時圖注意力網(wǎng)絡(luò)(graph attention network, GAT)以及GraphSAGE等模型也都得到了大量應(yīng)用.基于GNN的預(yù)測模式可以概括為:假設(shè)Xt∈N×M(其中,N為路網(wǎng)中的節(jié)點數(shù)量,M為預(yù)測所使用到的先前時間步的長度),在給定拓撲網(wǎng)絡(luò)G=(V,E)的情況下(V為節(jié)點集;E為邊集),旨在從歷史數(shù)據(jù)庫中學(xué)習(xí)得到一個映射函數(shù)F(·),從而能夠預(yù)測得到t+q時刻的路網(wǎng)中所有節(jié)點的交通流參數(shù)N.
(3)
Zhao等[33]通過結(jié)合GCN與GRU,構(gòu)建了一種名為T-GCN的圖神經(jīng)網(wǎng)絡(luò)模型,能夠有效處理圖結(jié)構(gòu)的時間序列數(shù)據(jù).Zhang等[34]為了解決交通流多步預(yù)測這一難題,提出了一種名為AGC-Seq2Seq的圖神經(jīng)網(wǎng)絡(luò)預(yù)測模型,通過融合Seq2Seq、GCN以及注意力機制來深入挖掘路網(wǎng)交通流的復(fù)雜時空相關(guān)性.Liu等[35]提出了一種考慮時空關(guān)聯(lián)性的數(shù)據(jù)修復(fù)算法,用于填補路段上的缺失速度數(shù)據(jù),并利用GraphSAGE模型來開展網(wǎng)絡(luò)級交通速度預(yù)測.Tang等[36]設(shè)計了一種結(jié)合復(fù)雜網(wǎng)絡(luò)理論中的社團檢測算法與GCN的MC_STGCN模型,并將其應(yīng)用于出租車出行需求預(yù)測,通過實驗證明了引入社團檢測算法的有效性.閆旭等[37]為提高城市交通態(tài)勢的預(yù)測精度,將自由流動可達矩陣(free-flow reachable matrix)引入時空圖卷積神經(jīng)網(wǎng)絡(luò)中,構(gòu)建了一種改進的網(wǎng)絡(luò)級交通流量預(yù)測模型.魏金澤[38]針對于交通數(shù)據(jù)樣本缺失的問題,設(shè)計了一種基于遷移學(xué)習(xí)機制的時空圖網(wǎng)絡(luò)模型,分別利用GRU以及GCN捕捉交通系統(tǒng)的時空關(guān)聯(lián)性,并利用注意力機制挖掘時空模態(tài)特征,實現(xiàn)了小樣本條件下短時交通流的準確預(yù)測.奚桂鍇[39]設(shè)計了一種名為時空語義圖神經(jīng)網(wǎng)絡(luò)的時空預(yù)測模型,利用時序建模策略分別提取交通狀態(tài)的時空依賴性,并通過消融實驗證明了各模塊的有效性.潘衛(wèi)鵬等[40]設(shè)計了一種圖注意力卷積網(wǎng)絡(luò),并通過真實數(shù)據(jù)集上的交通流預(yù)測實驗證明了該模型能夠準確提取路網(wǎng)交通流的時空關(guān)聯(lián)性.陳孟等[41]針對于實時多模態(tài)時空數(shù)據(jù)的變化特征,設(shè)計了一種結(jié)合時空圖卷積網(wǎng)絡(luò)與卡爾曼濾波的預(yù)測模型,并開展了有效性與可信度評估,證明了該模型的準確性與魯棒性.曾筠程等[42]設(shè)計了一種基于有向圖卷積神經(jīng)網(wǎng)絡(luò)的交通預(yù)測模型,并在此基礎(chǔ)上提出了擁堵產(chǎn)生點識別方法及管控策略,從而有效阻斷交通擁堵在路網(wǎng)中的蔓延,提升道路網(wǎng)絡(luò)的通行效率.但是,在將圖神經(jīng)網(wǎng)絡(luò)用于交通流預(yù)測的過程中,存在一個關(guān)鍵性的問題,即需要先構(gòu)建一個或若干個合理的拓撲路網(wǎng).在圖神經(jīng)網(wǎng)絡(luò)中所使用到的拓撲網(wǎng)絡(luò)不僅會對預(yù)測結(jié)果產(chǎn)生較大的影響,同時其疏密程度還會直接影響深度學(xué)習(xí)模型的運行效率.在現(xiàn)有的高速公路的短時交通流預(yù)測研究中,學(xué)者們普遍采取了物理鄰接關(guān)系或者基于距離的網(wǎng)絡(luò)構(gòu)建準則來進行拓撲網(wǎng)絡(luò)構(gòu)建.但是,相較于高速公路網(wǎng)絡(luò)而言,城市路網(wǎng)具有更為稠密的網(wǎng)絡(luò)密度以及更大的連通性.以圖6所示的局部路網(wǎng)內(nèi)的車道級流量預(yù)測為例,該區(qū)域共存在四個交叉口,16個進口道,64條車道.如果直接從車道之間的鄰接關(guān)系來提取得到拓撲網(wǎng)絡(luò),則可能致使部分連接邊之間的關(guān)聯(lián)性較弱.此外,出于檢測設(shè)備安裝及運維成本的考慮,城市路網(wǎng)內(nèi)部并非所有交叉口處均安裝了檢測設(shè)備,導(dǎo)致配備有檢測設(shè)備的交叉口在路網(wǎng)內(nèi)部的空間分布情況較為稀疏.如何在稀疏條件下利用鄰接關(guān)系進行拓撲網(wǎng)絡(luò)構(gòu)建,同樣也是一項艱巨的挑戰(zhàn).而如果直接采取基于距離的網(wǎng)絡(luò)構(gòu)建方法,則會面臨著難以定義城市路網(wǎng)內(nèi)部車道與車道之間的距離這一難題.
因此,如何在城市路網(wǎng)內(nèi)部更加合理、有效地為圖神經(jīng)網(wǎng)絡(luò)構(gòu)建拓撲圖已成為網(wǎng)絡(luò)級短時交通流預(yù)測研究亟需解決的問題.在現(xiàn)階段,已有部分學(xué)者針對于這一問題展開嘗試.文獻[43]為了在分布稀疏的車牌識別設(shè)備(license plate recognition, LPR)所構(gòu)成的路網(wǎng)下開展車道級以及進口道級短時交通流預(yù)測研究,提出了一種基于數(shù)據(jù)驅(qū)動的路網(wǎng)重構(gòu)方法.該研究將車道或進口道視為網(wǎng)絡(luò)中的節(jié)點,先從LPR數(shù)據(jù)中提取得到了各節(jié)點之間的平均行程時間以及流量轉(zhuǎn)移關(guān)系,在此基礎(chǔ)上將各節(jié)點之間的平均行程時間視為節(jié)點之間的距離,引入了一種復(fù)雜網(wǎng)絡(luò)構(gòu)建方法將路網(wǎng)轉(zhuǎn)化為有向圖,并在此基礎(chǔ)上利用流量轉(zhuǎn)移關(guān)系計算網(wǎng)絡(luò)中各條邊上的權(quán)重,從而將其構(gòu)建為加權(quán)有向圖,最終輸入圖神經(jīng)網(wǎng)絡(luò)中進行預(yù)測.通過多種圖神經(jīng)網(wǎng)絡(luò)在路網(wǎng)鄰接網(wǎng)絡(luò)及所構(gòu)建的加權(quán)有向圖上的預(yù)測結(jié)果對比,實驗結(jié)果表明:所選取的若干種圖神經(jīng)網(wǎng)絡(luò)模型均能夠在所構(gòu)建的加權(quán)有向圖上取得更為準確的預(yù)測效果.此外,在地鐵短時客流預(yù)測領(lǐng)域中,Liu等[44]分別利用地鐵拓撲網(wǎng)絡(luò)、站點間客流相似度,以及站間OD矩陣來進行拓撲圖構(gòu)建,并提出了一種適合于多圖卷積的圖神經(jīng)網(wǎng)絡(luò)模型來實現(xiàn)客流預(yù)測.這些基于數(shù)據(jù)驅(qū)動以及復(fù)雜網(wǎng)絡(luò)的研究方法為未來此領(lǐng)域的研究提供了一種可行的思路,即可以利用路網(wǎng)交通特征來進行網(wǎng)絡(luò)重構(gòu),而非直接使用路網(wǎng)內(nèi)部的鄰接關(guān)系.通過這種方式,不僅能夠有效解決檢測設(shè)備分布稀疏這一問題,同時還能夠引入更為豐富的實際交通特征到拓撲網(wǎng)絡(luò)構(gòu)建的過程中來,有助于提升模型的預(yù)測準確度.
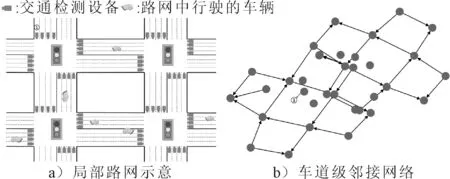
圖6 局部路網(wǎng)車道級鄰接網(wǎng)絡(luò)構(gòu)建
與此同時,有學(xué)者開始認為基于先驗知識及路網(wǎng)鄰接關(guān)系所構(gòu)建得到的拓撲網(wǎng)絡(luò)可能難以充分體現(xiàn)出影響交通需求的內(nèi)在屬性,例如,用地性質(zhì)、街區(qū)基礎(chǔ)設(shè)施特征等.因此,基于可學(xué)習(xí)鄰接矩陣的交通流預(yù)測研究同樣也開始吸引學(xué)者們的關(guān)注,這種方法通過數(shù)據(jù)驅(qū)動的方式,利用深度學(xué)習(xí)模型從既有交通數(shù)據(jù)中學(xué)習(xí)得到一個鄰接矩陣,再將其用于交通流預(yù)測.Diao等[45]提出了一種動態(tài)拉普拉斯估計器,從而將所得到的動態(tài)圖結(jié)構(gòu)輸入圖神經(jīng)網(wǎng)絡(luò)中進行預(yù)測,并證明了所提出的空間相關(guān)性學(xué)習(xí)過程(即動態(tài)拉普拉斯估計器)的有效性.此外,考慮到交通網(wǎng)絡(luò)的動態(tài)變化特征,Li等[46]提出了一種結(jié)合圖神經(jīng)網(wǎng)絡(luò)與循環(huán)神經(jīng)網(wǎng)絡(luò)的模型結(jié)構(gòu),使得深度學(xué)習(xí)模型能夠在循環(huán)神經(jīng)網(wǎng)絡(luò)的每一個步長下生成一個鄰接矩陣,從而反映出路網(wǎng)的時變特征.
2 現(xiàn)存挑戰(zhàn)及未來研究方向
2.1 融合多維交通特征的預(yù)測模型
近些年來,盡管眾多新穎的深度學(xué)習(xí)模型能夠在城市道路短時交通流預(yù)測任務(wù)上取得更為準確的預(yù)測效果,但是這些模型往往只關(guān)注于從數(shù)據(jù)驅(qū)動的角度來探索城市路網(wǎng)的復(fù)雜時空相關(guān)性,而忽略了城市路網(wǎng)這一交通系統(tǒng)內(nèi)在的固有特征.例如,城市路網(wǎng)內(nèi)部的各路段之間,其道路等級、路段長度,以及道路基礎(chǔ)設(shè)施等勢必存在著一定的差異性,而這些因素均會對交通狀態(tài)產(chǎn)生影響.對于未來的交通流預(yù)測研究而言,值得關(guān)注的交通特征包括:
1) 速度、流量等交通參數(shù)之間的關(guān)聯(lián)性 現(xiàn)有的研究大多僅關(guān)注于單一交通流狀態(tài)的短時預(yù)測,而忽略了多種參數(shù)之間的關(guān)聯(lián)性.Zou等[47]基于copula聯(lián)合分布函數(shù)的研究表明,微觀交通流參數(shù)之間存在依賴性.未來的研究可以在預(yù)測模型中深入探索各參數(shù)之間的內(nèi)在關(guān)聯(lián)性,實現(xiàn)各交通參數(shù)未來狀態(tài)的協(xié)同預(yù)測.
2) 路段之間的異質(zhì)性 當(dāng)網(wǎng)絡(luò)級預(yù)測的節(jié)點為城市路網(wǎng)中的交叉口或斷面時,拓撲網(wǎng)絡(luò)中的邊即代表連接各節(jié)點的路段.由于各路段長度、車道數(shù)等交通基礎(chǔ)設(shè)施條件存在差異,則各相鄰節(jié)點對于中心節(jié)點應(yīng)具有不同的重要性.此外,如果將路網(wǎng)中的各路段視為網(wǎng)絡(luò)中的節(jié)點,網(wǎng)絡(luò)中的邊則表征路段之間的相鄰關(guān)系.而由于各路段具有不同的長度,不僅會導(dǎo)致各節(jié)點在整個拓撲網(wǎng)絡(luò)中的重要性不同,同時也會導(dǎo)致長路段與短路段上所采集到的交通狀態(tài)的準確性存在差異性.
3) 信號配時方案 城市道路交通流的一個最主要的特征就在于會在交叉口處受到信號設(shè)備的控制,從而給交通流帶來間斷流特征,并且造成其在短時間間隔下具有較強的波動性.在未來的城市道路交通流預(yù)測研究中,可進一步將信號配時方案與交通流時間序列數(shù)據(jù)有效融合,從而提升預(yù)測模型對于強波動性交通流數(shù)據(jù)的應(yīng)對能力.
2.2 多源數(shù)據(jù)時空特征協(xié)同預(yù)測
現(xiàn)階段,城市路網(wǎng)內(nèi)部的交通狀態(tài)檢測設(shè)備可以劃分為固定檢測設(shè)備與移動式檢測設(shè)備兩種類型.其中,固定檢測設(shè)備往往安裝在城市道路交叉口處,而移動式檢測設(shè)備主要為安裝在出租車等浮動車上的GPS設(shè)備.從二者的安裝位置及數(shù)據(jù)采集特點可以發(fā)現(xiàn),固定檢測設(shè)備能夠準確統(tǒng)計斷面交通信息,而移動監(jiān)測設(shè)備能夠反映出各路段上的交通狀態(tài).因此,可將二者采集得到的交通狀態(tài)分別視為點數(shù)據(jù)以及線數(shù)據(jù).前者能夠反映進出路段的車流狀態(tài),而后者能夠展現(xiàn)出路段內(nèi)部的實際交通分布情況,而如果能夠?qū)Ⅻc數(shù)據(jù)與線數(shù)據(jù)有效融合,則能夠起到互為補充的作用,從而有助于進一步提升預(yù)測的準確性.
現(xiàn)階段的研究往往僅單獨考慮單一交通方式自身的出行需求預(yù)測,而忽略了各種交通方式之間的客流相似性與協(xié)同性.例如,城市公共交通系統(tǒng)大多面臨著“最后一公里”難題,而共享單車的出現(xiàn)則為乘客乘坐公共交通出行提供了便利,即乘客能夠搭乘共享單車前往就近的公交或地鐵站點,從而實現(xiàn)各種交通方式之間的換乘,進而在多種交通方式的客流之間產(chǎn)生了協(xié)同性.因此,未來的研究可以考慮將多種交通方式的短時出行需求預(yù)測任務(wù)相結(jié)合,通過多任務(wù)、多圖卷積等深度學(xué)習(xí)框架實現(xiàn)城市交通系統(tǒng)中各種交通方式的短時出行需求的協(xié)同預(yù)測.
但是,由于我國目前各種交通方式的運營數(shù)據(jù)均掌握在各自運營企業(yè)內(nèi)部,而要達成以上目的,勢必會面臨數(shù)據(jù)壁壘的問題.出于數(shù)據(jù)安全與隱私保護的考慮,各種交通方式的運營數(shù)據(jù)之間難以實現(xiàn)數(shù)據(jù)共享.而要有效解決這一問題,未來的研究可以考慮引入聯(lián)邦學(xué)習(xí)(federated learning)機制,從而在保障數(shù)據(jù)安全與用戶隱私的前提下,使用機器學(xué)習(xí)或深度學(xué)習(xí)模型來進行短時出行需求預(yù)測.目前,聯(lián)邦學(xué)習(xí)已被Liu等[48]應(yīng)用高速公路短時交通流預(yù)測.但是,該項研究僅考慮了高速公路單一數(shù)據(jù)集的交通流預(yù)測,未來的研究可進一步將聯(lián)邦學(xué)習(xí)機制拓展至城市交通系統(tǒng)中,從而深入挖掘各種交通方式客流之間的相似性與協(xié)同性.
2.3 基于歸納學(xué)習(xí)機制的多路網(wǎng)交通流預(yù)測方法
現(xiàn)實世界中往往會存在著在城市新區(qū)新建路網(wǎng)的情況.當(dāng)新城區(qū)的道路網(wǎng)絡(luò)投入運營時,由于缺乏歷史數(shù)據(jù)進行模型訓(xùn)練,傳統(tǒng)的預(yù)測模型難以在此種情形下得到應(yīng)用.在這種背景下,很容易想到一種解決思路:將在其他路網(wǎng)中完成訓(xùn)練的模型引入此新建路網(wǎng)上進行交通流預(yù)測.雖然交通流預(yù)測領(lǐng)域已經(jīng)歷了四十余年的發(fā)展,大量新穎的預(yù)測模型的出現(xiàn)使得預(yù)測準確性不斷提升,但是對于絕大多數(shù)預(yù)測方法而言,普遍在泛化能力上有所欠缺,難以滿足以上需求.歸納學(xué)習(xí)是一種從個別現(xiàn)象推廣至一般規(guī)律的深度學(xué)習(xí)模式,具有歸納學(xué)習(xí)能力的模型一般具有較強的泛化能力,能夠有效應(yīng)對未曾在訓(xùn)練集中出現(xiàn)過的實際數(shù)據(jù).從交通流預(yù)測的角度來看,歸納學(xué)習(xí)則可以視為將在其他路網(wǎng)上進行訓(xùn)練的模型,在不經(jīng)再次訓(xùn)練的情況下,直接應(yīng)用于另一路網(wǎng)進行預(yù)測.同時,隨著城市路網(wǎng)內(nèi)部交通檢測設(shè)備的不斷完善,如果能夠直接運用既有的圖神經(jīng)網(wǎng)絡(luò)模型,來實現(xiàn)嵌入新檢測器后的路網(wǎng)內(nèi)部的交通流預(yù)測,則能夠大幅節(jié)省深度學(xué)習(xí)模型所帶來的開銷.因此,這種模式除了能夠解決上述提到的數(shù)據(jù)缺乏情況下的預(yù)測難題,同時還能夠以一種普適性的模型來對多個路網(wǎng)的交通狀態(tài)進行預(yù)測,從而大幅降低深度學(xué)習(xí)模型的訓(xùn)練開銷與存儲成本.
在圖神經(jīng)網(wǎng)絡(luò)領(lǐng)域,具有歸納學(xué)習(xí)能力的傳統(tǒng)圖神經(jīng)網(wǎng)絡(luò)預(yù)測框架主要包括GAT以及GraphSAGE網(wǎng)絡(luò)等.文獻[43]在GAT模型的基礎(chǔ)上,融合了GRU、雙向LSTM以及殘差連接結(jié)構(gòu),提出了一種名為STGGAT模型的預(yù)測框架,實驗結(jié)果表明STGGAT模型與GAT模型均能在不加再次訓(xùn)練的情況下,直接應(yīng)用于另一拓撲結(jié)構(gòu)的路網(wǎng)上進行預(yù)測,并取得可接受的預(yù)測準確率.從現(xiàn)實世界中的交通管理需求來看,具有歸納學(xué)習(xí)能力的交通流預(yù)測模型具有較強的工程應(yīng)用價值,因此未來的研究可以關(guān)注于在訓(xùn)練過程中引入子圖切割的訓(xùn)練方式或者設(shè)計其他更為新穎的深度學(xué)習(xí)框架來提升模型在歸納學(xué)習(xí)任務(wù)上的預(yù)測效果.
2.4 融合時空復(fù)雜網(wǎng)絡(luò)的路網(wǎng)流量預(yù)測
現(xiàn)階段的路網(wǎng)級交通流預(yù)測研究普遍考慮將路網(wǎng)內(nèi)的路段或檢測器所組成的網(wǎng)絡(luò)視為拓撲網(wǎng)絡(luò).除這種空間網(wǎng)絡(luò)特性以外,已有利用復(fù)雜網(wǎng)絡(luò)理論將交通流時間序列轉(zhuǎn)化為復(fù)雜網(wǎng)絡(luò),進而對交通流的時變特征展開深入挖掘.Tang等[49]利用時間序列相空間重構(gòu)方法搭建了交通流量復(fù)雜網(wǎng)絡(luò)模型,并對復(fù)雜網(wǎng)絡(luò)中的關(guān)鍵參數(shù)的設(shè)定進行了討論分析.Yan等[50]利用復(fù)雜網(wǎng)絡(luò)理論對交通流多元時間序列數(shù)據(jù)進行建模,并進一步從復(fù)雜網(wǎng)絡(luò)角度對交通流特征展開分析.從網(wǎng)絡(luò)構(gòu)建的對象來看,現(xiàn)有的短時交通流預(yù)測中所使用到的拓撲圖可以視為空間維度的復(fù)雜網(wǎng)絡(luò),能夠反映出路網(wǎng)中不同位置的交通流狀態(tài)之間的交互作用;而文獻[49]的研究則代表時間維度的復(fù)雜網(wǎng)絡(luò),能夠體現(xiàn)交通流的時間演化特征.從短時交通流預(yù)測領(lǐng)域的發(fā)展來看,充分探索交通流的空間關(guān)聯(lián)性與非線性時間依賴性始終是研究熱點,為了有效解決這一問題,包括LSTM、GRU以及注意力機制等在內(nèi)的深度學(xué)習(xí)框架被廣泛應(yīng)用于此領(lǐng)域中.而這些方法往往注重于依靠深度學(xué)習(xí)的“黑箱”模式來挖掘交通流的時間序列特征,但是卻缺乏可解釋性.因此,未來的研究可以考慮將交通流時間序列的復(fù)雜網(wǎng)絡(luò)特征與空間復(fù)雜網(wǎng)絡(luò)相結(jié)合,引入多元時間序列復(fù)雜網(wǎng)絡(luò)構(gòu)建方法,來對于短時交通流的時空耦合特征進行建模,并與深度學(xué)習(xí)模型相結(jié)合進行預(yù)測,使預(yù)測方法更加貼合交通系統(tǒng)的真實演化規(guī)律.
2.5 基于時空kriging的交通狀態(tài)估計及預(yù)測
在城市路網(wǎng)內(nèi)部,出于檢測設(shè)備安裝成本與運營維護開銷的考慮,交管部門難以在所有的交叉口處均安裝檢測設(shè)備.如果能夠有效感知未覆蓋檢測設(shè)備的交叉口處的交通狀態(tài),則能夠為城市路網(wǎng)的實時交通管理提供更為豐富的決策依據(jù).同時,當(dāng)交通狀態(tài)估計的準確率達到一定可接受范圍時,則能夠有助于減少城市內(nèi)部的交通檢測器的數(shù)量,從而降低交管部門的運營成本.
而要解決以上問題,時空kriging任務(wù)便是一種可行的解決方案.交通流預(yù)測任務(wù)中的時空kriging任務(wù)可以概括為:利用路網(wǎng)中既有傳感器獲取到的交通流數(shù)據(jù),來估計同一時段下未覆蓋有傳感器處的交通流信息.文獻[51]提出了一種歸納圖神經(jīng)網(wǎng)絡(luò)kriging模型,并設(shè)計了一種基于子圖隨機分割的訓(xùn)練策略.在多個高速公路數(shù)據(jù)集上的實驗結(jié)果表明,所提出的預(yù)測框架能夠有效提升模型的歸納學(xué)習(xí)能力,使其滿足時空kriging任務(wù)的需求.與高速公路網(wǎng)絡(luò)相比,城市路網(wǎng)具有更高的網(wǎng)絡(luò)密度與連通性,如何充分利用城市路網(wǎng)內(nèi)部的空間關(guān)聯(lián)性以及考慮各路段之間的異質(zhì)性,是未來城市路網(wǎng)時空kriging研究所不能忽視的問題.此外,未來的研究還可考慮將時空kriging與短時交通流預(yù)測任務(wù)相結(jié)合,既實現(xiàn)未覆蓋檢測設(shè)備處的交通流狀態(tài)估計,同時還對其未來狀態(tài)進行預(yù)測.
2.6 緩解城市道路交通流的強波動性
由于交叉口處的城市道路交通流會受到信號設(shè)備的管控,因此導(dǎo)致交通流受到周期性間斷,這種間斷現(xiàn)象會對交通流時間序列數(shù)據(jù)在短時間間隔下造成嚴重的振蕩現(xiàn)象,從而給準確預(yù)測帶來嚴峻的挑戰(zhàn).目前,已有學(xué)者將小波理論、EMD等數(shù)據(jù)降噪算法引入短時交通流預(yù)測中,并通過實驗證明了該類方法的有效性.未來的研究可以考慮結(jié)合相位周期、交通事故、惡劣天氣等因素,從數(shù)據(jù)降噪的角度對交通流的短時波動特征進行挖掘,消除高頻噪聲數(shù)據(jù)的影響,還原交通流數(shù)據(jù)真實變化規(guī)律,提升模型的預(yù)測準確性.
2.7 拓撲網(wǎng)絡(luò)構(gòu)建范式設(shè)計
近年來圖神經(jīng)網(wǎng)絡(luò)逐漸成為了城市路網(wǎng)短時交通流預(yù)測領(lǐng)域中所使用到的一大重要工具.綜合前文中的介紹,現(xiàn)階段所應(yīng)用的網(wǎng)絡(luò)構(gòu)建方法可以概括為:基于鄰接關(guān)系的拓撲網(wǎng)絡(luò)、基于距離閾值的拓撲網(wǎng)絡(luò)、基于交通特征的拓撲網(wǎng)絡(luò)以及基于可學(xué)習(xí)鄰接矩陣的拓撲網(wǎng)絡(luò).這些方法均在可解釋性、實際交通意義等方面具有各自特有的優(yōu)勢,導(dǎo)致現(xiàn)階段在基于GNN的短時交通流預(yù)測種尚且缺乏一種通用的拓撲圖構(gòu)建范式.因此,深入探究哪種拓撲圖構(gòu)建方法更適合于城市路網(wǎng)短時交通流預(yù)測任務(wù),也是未來研究中潛在的不可避免的一個問題.
3 結(jié) 束 語
本文針對于城市道路短時交通流預(yù)測這一熱點問題,回顧了近年來的發(fā)展歷程與主要研究方法.根據(jù)預(yù)測對象的空間范圍,將現(xiàn)有研究按照單節(jié)點交通流預(yù)測與網(wǎng)絡(luò)級交通流預(yù)測進行分類,分析了現(xiàn)有研究中存在的不足,并指出了融合多維交通特征、開展多源數(shù)據(jù)時空特征協(xié)同預(yù)測、提升模型歸納學(xué)習(xí)能力、有效融合時間維度復(fù)雜網(wǎng)絡(luò)及空間維度復(fù)雜網(wǎng)絡(luò)、開展時空kriging研究、緩解交通流時間序列數(shù)據(jù)的短時強波動性以及設(shè)計GNN拓撲網(wǎng)絡(luò)構(gòu)建范式等未來研究方向.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12