阻尼繞組對(duì)永磁同步電機(jī)運(yùn)行性能影響的研究
2022-11-12 02:03:26王鑫磊
船電技術(shù) 2022年11期
彭 蓮, 王鑫磊
應(yīng)用研究
阻尼繞組對(duì)永磁同步電機(jī)運(yùn)行性能影響的研究
彭 蓮, 王鑫磊
(武漢船用機(jī)械有限責(zé)任公司 武漢 430084)
艦用永磁同步電機(jī)轉(zhuǎn)子上加裝阻尼繞組能使電機(jī)具備自啟動(dòng)能力,提高電機(jī)在負(fù)載變化和受到擾動(dòng)時(shí)的穩(wěn)定性,提升系統(tǒng)的適應(yīng)性和生命力。帶阻尼繞組的永磁同步電機(jī)模型更為復(fù)雜,傳統(tǒng)的矢量控制方法在電機(jī)調(diào)速時(shí)無法對(duì)其電流實(shí)現(xiàn)解耦控制。本文結(jié)合矢量控制方法,分析了阻尼繞組對(duì)永磁同步電機(jī)在調(diào)速過程中的影響,搭建了id=0矢量控制下帶阻尼繞組永磁同步電機(jī)和普通永磁同步電機(jī)調(diào)速系統(tǒng)的Simulink仿真模型,進(jìn)行對(duì)比研究,結(jié)果表明阻尼繞組能加速永磁同步電機(jī)調(diào)速,減小調(diào)速過程中轉(zhuǎn)速和轉(zhuǎn)矩的震蕩。
阻尼繞組 永磁同步電機(jī) 矢量控制
0 引言
艦用永磁電機(jī)為了減小輸出轉(zhuǎn)矩脈動(dòng)、提高電機(jī)適應(yīng)力,通常會(huì)在轉(zhuǎn)子上加裝阻尼繞組。
在直接由三相正弦電網(wǎng)供電的同步電動(dòng)機(jī)中,阻尼繞組的主要作用有產(chǎn)生異步起動(dòng)轉(zhuǎn)矩、消弱非對(duì)稱運(yùn)行而引起的諧波電流、衰減轉(zhuǎn)子的自由振蕩。在早期的同步電機(jī)中得到了廣泛應(yīng)用。隨著變頻器的普及,阻尼繞組在變頻調(diào)速的同步電機(jī)中的作用和必要性也成為學(xué)者和電氣工程師關(guān)注的焦點(diǎn)。
文獻(xiàn)[3][4]分別研究采用電流型和電壓型變頻調(diào)速裝置供電時(shí)阻尼繞組對(duì)系統(tǒng)的動(dòng)態(tài)和靜態(tài)性能的影響,指出在電流型變頻調(diào)速系統(tǒng)中,阻尼繞組對(duì)系統(tǒng)的動(dòng)態(tài)特性無實(shí)質(zhì)性影響。在電壓型變頻調(diào)速系統(tǒng)中,阻尼繞組的作用主要體現(xiàn)在對(duì)系統(tǒng)動(dòng)態(tài)特性的改善,特別是當(dāng)系統(tǒng)中采用定子繞組磁通控制方式時(shí),阻尼繞組的存在加快了定子電流的響應(yīng)速度,同時(shí)彌補(bǔ)了勵(lì)磁繞組時(shí)間常數(shù)大,難以瞬時(shí)補(bǔ)償電樞反應(yīng)的缺點(diǎn)。但這是以控制系統(tǒng)能精確估測(cè)定子磁通為前提的。而阻尼繞組的存在使精確估測(cè)磁通變得困難。因此只有當(dāng)希望獲得十分好的轉(zhuǎn)矩響應(yīng)特性時(shí)才有必要考慮設(shè)置阻尼繞組。而這時(shí)必須適當(dāng)設(shè)計(jì)磁通控制器以保證有效利用阻尼繞組帶來的對(duì)動(dòng)態(tài)特性的改善。國(guó)外學(xué)者Hussels P. 認(rèn)為阻尼繞組在電機(jī)動(dòng)態(tài)過程中能起到保持氣隙磁鏈不變的作用[5]。文獻(xiàn)[6]研究磁場(chǎng)定向控制的交一交變頻同步電機(jī)阻尼繞組的作用,認(rèn)為交一交變頻器的輸出電壓有諧波,在穩(wěn)態(tài)情況下交一交變頻同步電機(jī)的阻尼繞組中就有感應(yīng)電流,會(huì)引起轉(zhuǎn)矩脈動(dòng)和諧波損耗。對(duì)于用在軋鋼廠的交一交變頻同步電機(jī)來說,裝設(shè)阻尼繞組,特別是q軸阻尼繞組,是十分必要的[6]。文獻(xiàn)[7]對(duì)電勵(lì)磁同步電機(jī)轉(zhuǎn)子阻尼繞組對(duì)電機(jī)的動(dòng)態(tài)行為影響進(jìn)行研究,推導(dǎo)并分析了電勵(lì)磁同步電機(jī)中電磁轉(zhuǎn)矩與轉(zhuǎn)矩角關(guān)系式,結(jié)合仿真結(jié)果,指出在主轉(zhuǎn)矩角為零點(diǎn)附近主轉(zhuǎn)矩與主轉(zhuǎn)矩角的變化趨勢(shì)始終一致;交軸阻尼繞組能有效地抑制動(dòng)態(tài)中轉(zhuǎn)矩及轉(zhuǎn)速振蕩幅度;直軸阻尼繞組對(duì)改善系統(tǒng)動(dòng)態(tài)性能不明顯,且該繞組的存在易引起系統(tǒng)的不穩(wěn)定。從改善系統(tǒng)的動(dòng)態(tài)特性出發(fā),轉(zhuǎn)子上不宜設(shè)置直軸阻尼繞組[7]。
目前關(guān)于阻尼繞組對(duì)同步電機(jī)的影響的研究多集中在負(fù)載變化時(shí)的穩(wěn)定性。
對(duì)帶阻尼繞組永磁同步電機(jī)(line start permanent magnet synchronous machine,LSPMSM)進(jìn)行調(diào)速時(shí)通常采用普通永磁同步電機(jī)(permanent magnet synchronous machine,PMSM)的控制方法。但對(duì)阻尼繞組在PMSM矢量控制下的運(yùn)行性能的影響,以及現(xiàn)有的矢量控制方法對(duì)LSPMSM的適用性等問題,目前還缺少詳細(xì)、完備的理論分析。
1 帶阻尼繞組永磁同步電機(jī)模型與分析
1.1 帶阻尼繞組永磁同步電機(jī)模型
無阻尼繞組的永磁同步電機(jī)模型(permanent magnet synchronous machine,PMSM)比較普遍[8],在采用id=0的矢量控制方法時(shí),電機(jī)電磁轉(zhuǎn)矩與交軸電流成正比,能通過對(duì)定子電流完全控制來調(diào)節(jié)電磁轉(zhuǎn)矩和轉(zhuǎn)速[9]。
帶阻尼繞組的永磁同步電機(jī)(LSPMSM,line start permanent magnet synchronous machine)啟動(dòng)和調(diào)速過程中,定子電流和轉(zhuǎn)子阻尼繞組電流互感,轉(zhuǎn)子運(yùn)行不僅受到永磁體轉(zhuǎn)矩和異步轉(zhuǎn)矩同時(shí)作用[9],模型更加復(fù)雜[10~12]。
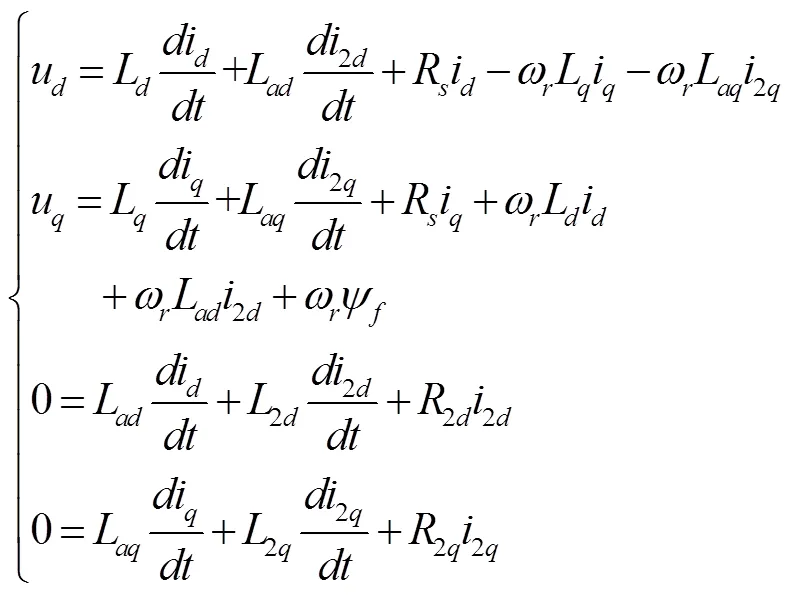
目前常用的帶阻尼繞組的永磁同步電機(jī)電壓模型為:
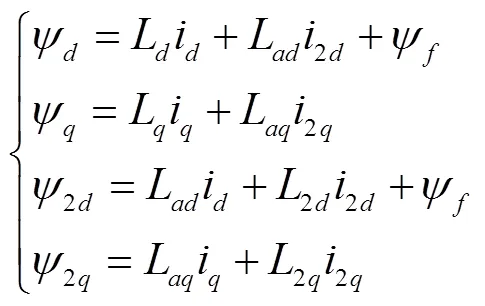
帶阻尼繞組的永磁同步電機(jī)磁鏈模型:
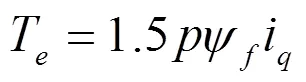
電磁轉(zhuǎn)矩:

運(yùn)動(dòng)平衡方程:
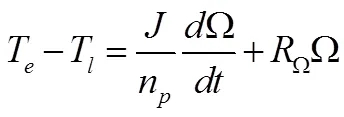
其中:u、u為定子電壓在、軸上的分量;為轉(zhuǎn)子旋轉(zhuǎn)電角速度;、為定子磁鏈在、軸上的分量;L、L為定子繞組在、軸上的電感;i、i為定子繞組直軸和交軸電流;為永磁體產(chǎn)生的磁鏈,T為負(fù)載轉(zhuǎn)矩;W為電機(jī)機(jī)械角速度;W為電機(jī)阻尼系數(shù);為轉(zhuǎn)動(dòng)慣量。L、L為定轉(zhuǎn)子之間直、交軸互感;2d、2q為轉(zhuǎn)子直、交軸自感;2d、2q為轉(zhuǎn)子直、交軸繞組電阻;2d、2q為轉(zhuǎn)子直、交軸磁鏈;2d、2q為轉(zhuǎn)子直、交軸電流。
1.2 矢量控制下阻尼繞組影響的分析
對(duì)于普通PMSM,采用i=0矢量控制調(diào)速的實(shí)質(zhì)是,根據(jù)i、i與各自參考值i*、i*的偏差量調(diào)節(jié)輸出電壓,保證i、i在各自參考值上下來回波動(dòng),由于調(diào)節(jié)速度很快,波動(dòng)量很小,i可看作零。
實(shí)現(xiàn)解耦控制后轉(zhuǎn)矩方程可簡(jiǎn)化為式(5):
對(duì)于LSPMSM,根據(jù)i、i與i*、i*的偏差調(diào)節(jié)輸出電壓,結(jié)合式(1)可知電壓u、u的變化不僅會(huì)導(dǎo)致i、i,的變化,還會(huì)導(dǎo)致2d、2q的變化,而2d、2q無法檢測(cè),2d、2q的變化在i、i上產(chǎn)生的影響不可控,導(dǎo)致無法將i、i控制在i*、i*附近。所以采用傳統(tǒng)i=0矢量控制對(duì)LSPMSM調(diào)速時(shí),無法保證i=0,轉(zhuǎn)矩方程不可簡(jiǎn)化,為式(6):
從公式(6)反應(yīng)出,LSPMSM轉(zhuǎn)矩包含永磁轉(zhuǎn)矩和感應(yīng)轉(zhuǎn)矩,有阻尼繞組作用時(shí)采用傳統(tǒng)的矢量控制方法,無法實(shí)現(xiàn)對(duì)因?yàn)槎ㄞD(zhuǎn)子之間感應(yīng)產(chǎn)生的轉(zhuǎn)矩實(shí)現(xiàn)有效控制。
假設(shè)開關(guān)器件為理想器件,忽略電力電子器件以及電機(jī)本體導(dǎo)致的電機(jī)電流上的5、7、11、13次諧波。當(dāng)LSPMSM處于穩(wěn)態(tài)運(yùn)行時(shí),i、i與i*、i*的偏差為零,u、u不變,由式(1)可知此時(shí)i、i保持不變,且2d、2q均為零,阻尼繞組對(duì)電機(jī)運(yùn)行不產(chǎn)生影響。
2 帶阻尼繞組永磁同步電機(jī)仿真模型
Simulink沒有自帶的帶阻尼繞組永磁同步電機(jī)模型,需要自建模型。根據(jù)原有的帶阻尼繞組的永磁同步電機(jī)數(shù)學(xué)模型進(jìn)行推導(dǎo)與化簡(jiǎn),可得到:



其中:
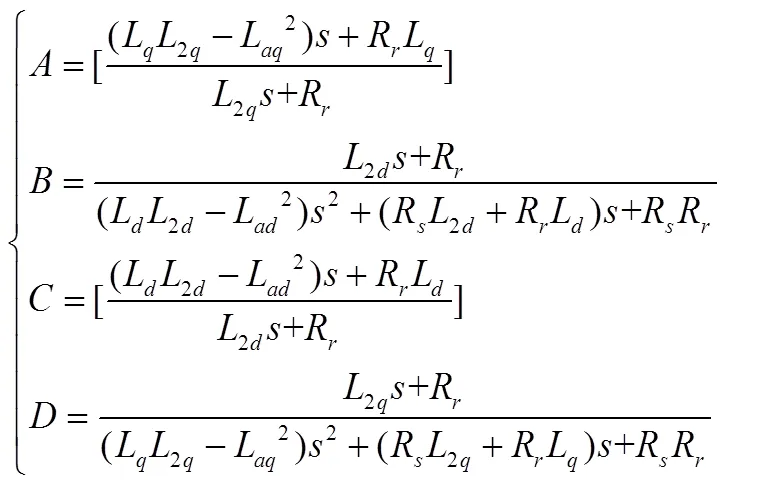
根據(jù)式(9)、(10)搭建帶阻尼繞組永磁同步電機(jī)的ui模塊如圖1所示:
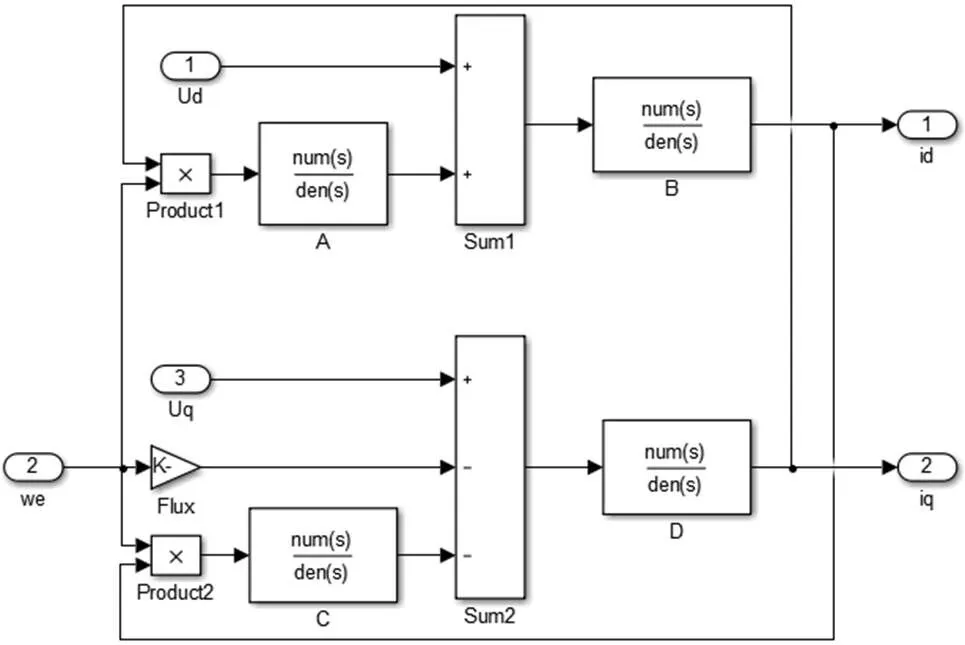
圖1 LSPMSM的udqidq模塊
根據(jù)公式(8)、(9)可搭建帶阻尼繞組永磁同步電機(jī)的i2d2q模塊如圖2所示;
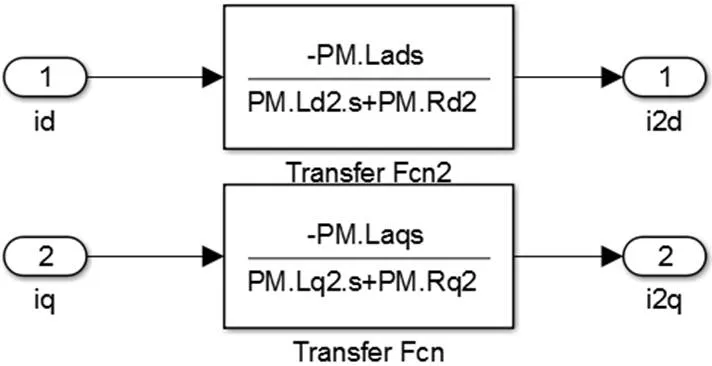
圖2 LSPMSM的idqi2d2q模塊
根據(jù)LSPMSM電磁轉(zhuǎn)矩公式(7)和轉(zhuǎn)矩平衡公式(6)可以搭建LSPMSM的Simulink仿真模塊如圖3所示;
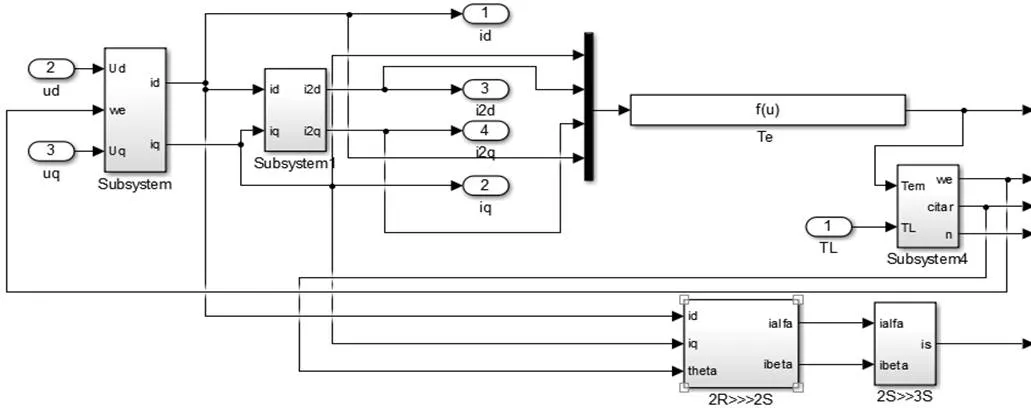
圖3 LSPMSM仿真模塊
3 阻尼繞組對(duì)電機(jī)運(yùn)行性能影響的仿真分析
假設(shè)開關(guān)器件為理想器件,忽略電力電子器件以及電機(jī)本體導(dǎo)致的電機(jī)電流上的5、7、11、13次諧波。為了研究阻尼繞組對(duì)永磁同步電機(jī)運(yùn)行性能的影響,在i=0量控制下帶阻尼繞組和去掉阻尼繞組后永磁同步電機(jī)的運(yùn)行性能進(jìn)行對(duì)比研究,帶阻尼繞組的永磁同步電機(jī)參數(shù),不帶阻尼繞組的普通永磁同步電機(jī)除沒有阻尼繞組外其它參數(shù)均為表1所示。
相同控制參數(shù)下,電機(jī)初速為0,給定轉(zhuǎn)速1000 r/min帶50 Nm 負(fù)載啟動(dòng),運(yùn)行穩(wěn)定后在0.6秒給定轉(zhuǎn)速增加到1500 r/min。電機(jī)1有阻尼繞組(LSPMSM)和去電阻尼繞組(PMSM)運(yùn)行對(duì)比圖如圖4。
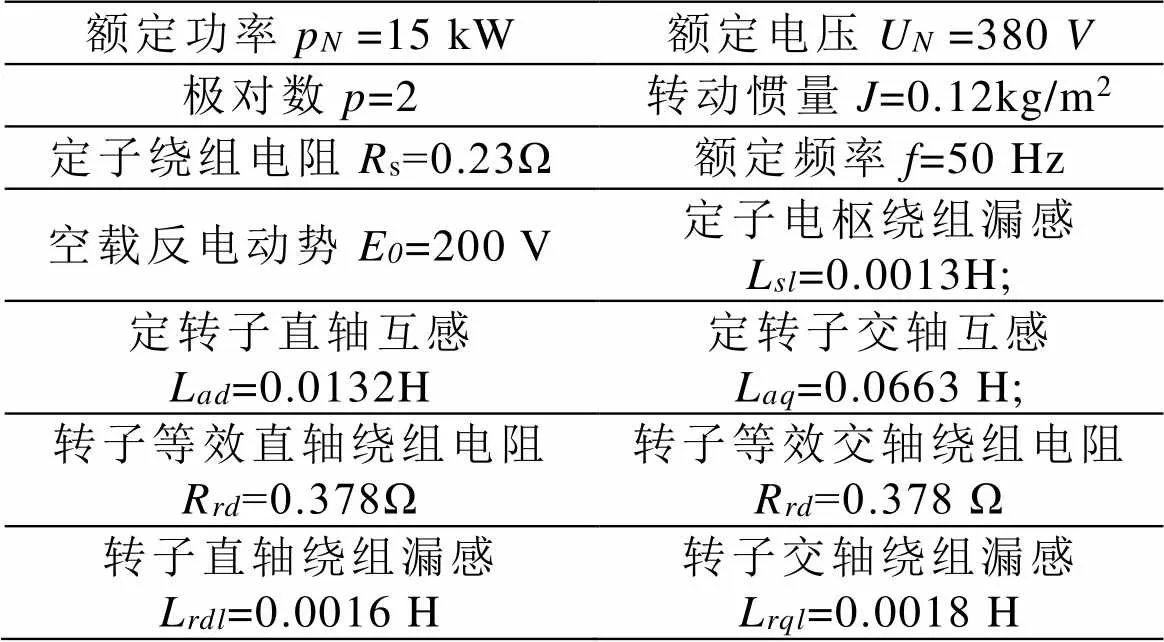
表1 帶阻尼繞組永磁同步電機(jī)參數(shù)
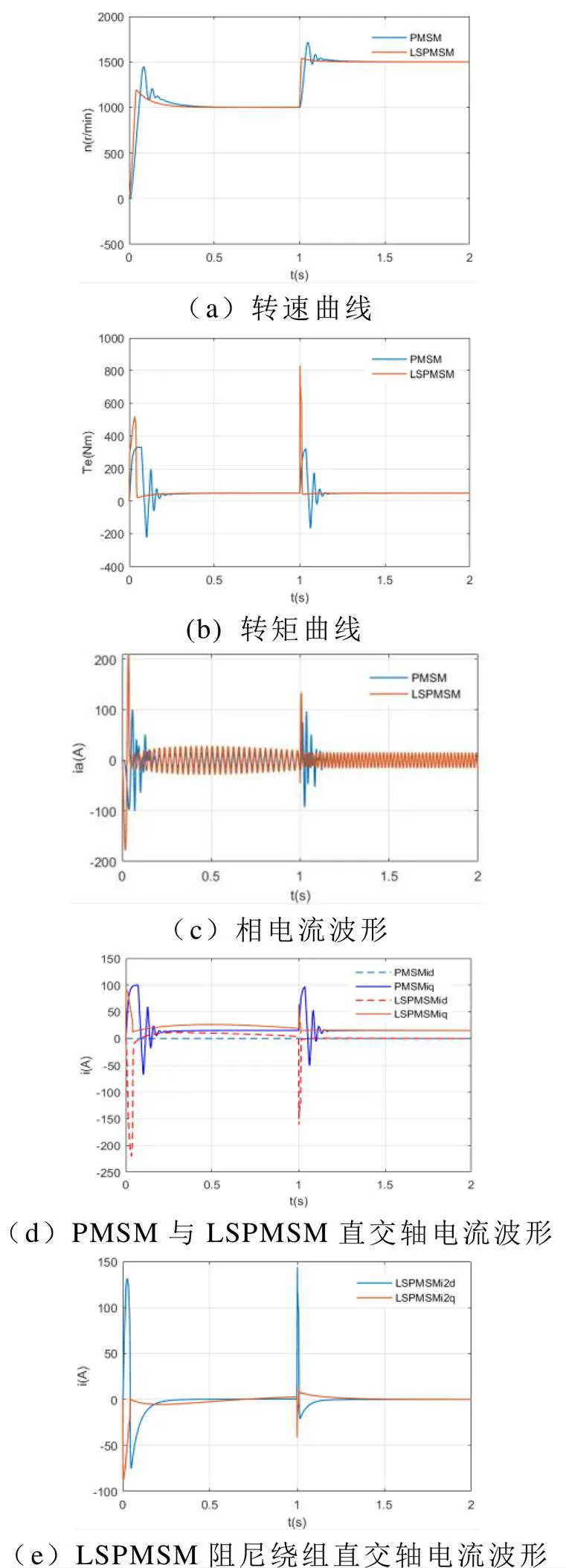
圖4 50 Nm負(fù)載下,PMSM與LSPMSM增速矢量控制效果對(duì)比圖
從圖4(a)、(b)可以看出,在相同控制方法和參數(shù)下,帶阻尼繞組永磁同步電機(jī)轉(zhuǎn)矩響應(yīng)和調(diào)速快,超調(diào)量小,進(jìn)入穩(wěn)態(tài)更快。
而從圖4(d)可以看出,普通永磁同步電機(jī)在采用i=0矢量控制方法時(shí),增速過程中軸電流i能控制為0,而帶阻尼繞組永磁同步電機(jī)采用同樣方法控制時(shí),由于只對(duì)i進(jìn)行控制,對(duì)轉(zhuǎn)子上阻尼繞組電流2d無法控制,2d會(huì)影響i,導(dǎo)致i≠0。
由圖4(d)、(e)可知,在帶有阻尼繞組的永磁同步電機(jī)增速過程中,i為負(fù),i為正,2d為正,2q為負(fù),結(jié)合公式(6),此時(shí)(L-L) ii、i、L2di為正值,L2qi為負(fù),i、i、2d、2q均產(chǎn)生正向轉(zhuǎn)矩。阻尼繞組在LSPMSM增速時(shí)能促進(jìn)電機(jī)轉(zhuǎn)速增加到指定轉(zhuǎn)速。
采用i=0矢量控制方法,在增速過程中i為負(fù),起到產(chǎn)生正向轉(zhuǎn)矩作用,LAPMSM在增速過程中的相電流要大于PMSM的相電流。達(dá)到穩(wěn)態(tài)后LSPMSM轉(zhuǎn)子阻尼繞組電流2d、2q均為0,LSPMSM與PMSM的定子直、交軸電流及相電流、轉(zhuǎn)速均相同,說明達(dá)到穩(wěn)態(tài)后阻尼繞組不會(huì)對(duì)電機(jī)運(yùn)行產(chǎn)生影響。
相同矢量控制參數(shù)下,對(duì)PMSM和LSPMSM減速過程進(jìn)行仿真。電機(jī)初速為1 500 r/min,負(fù)載50 Nm,在t=2.5s時(shí)將制定轉(zhuǎn)速設(shè)為1 000 r/min。帶阻尼繞組電機(jī)和普通永磁同步電機(jī)相關(guān)波形如圖5:
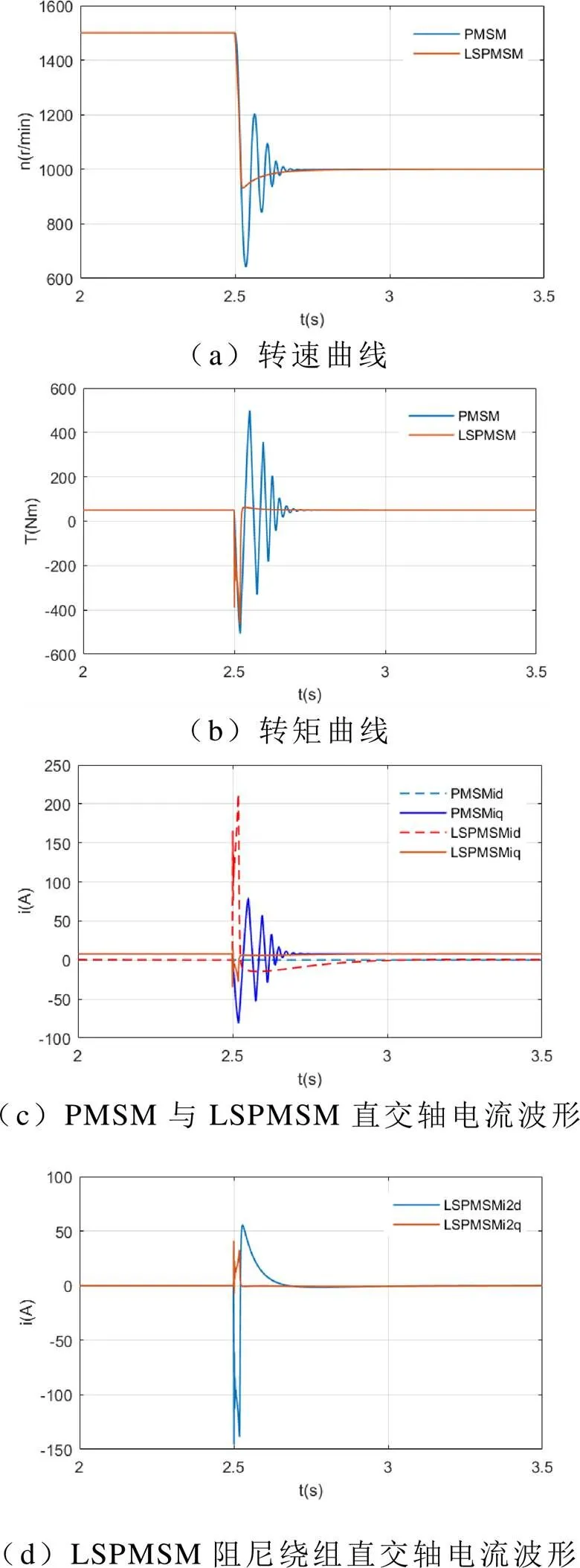
圖5 50 Nm負(fù)載下,PMSM與LSPMSM減速矢量控制效果對(duì)比圖
從圖5(a)、(b)可以看出,在相同控制方法和參數(shù)下,LSPMSM轉(zhuǎn)速由1 500 r/min降到1 000 r/min并進(jìn)入穩(wěn)態(tài)相比PMSM更快,轉(zhuǎn)速和轉(zhuǎn)矩波動(dòng)更小。而從圖5(c)可以看出,采用id=0矢量控制方法控制電機(jī)減速時(shí),LSPMSM直軸電流同樣無法控制為零。結(jié)合圖3(c)、(d)可知,在帶有阻尼繞組的永磁同步電機(jī)減速過程中,i為正,i為負(fù),2d為負(fù),2q為正,結(jié)合公式(6),此時(shí)(L-L) ii、i、L2di為負(fù)值,L2qi為正,i、i、2d、2q均產(chǎn)生負(fù)向轉(zhuǎn)矩。阻尼繞組在LSPMSM減速時(shí)能促進(jìn)電機(jī)轉(zhuǎn)速減到指定轉(zhuǎn)速。
綜合圖4和圖5可知,現(xiàn)有的矢量控制方法無法對(duì)LSPMSM定子電流實(shí)施精準(zhǔn)控制,但能實(shí)現(xiàn)對(duì)轉(zhuǎn)速的精準(zhǔn)調(diào)節(jié)。現(xiàn)有的矢量控制方法對(duì)于帶阻尼繞組的永磁同步電機(jī)仍然適用。
4 結(jié)論
本文分析了矢量控制下阻尼繞組對(duì)永磁同步電機(jī)運(yùn)行性能的影響,建立了帶阻尼繞組永磁同步電機(jī)的Simulink仿真模型,進(jìn)行LSPMSM與PMSM在i=0控制方法下的對(duì)比仿真,得到了如下結(jié)論:
1)建立的模型有效,對(duì)阻尼繞組對(duì)永磁同步電機(jī)運(yùn)行影響的理論分析正確;
2)現(xiàn)有的矢量控制方法沒有考慮阻尼繞組的影響,但對(duì)于帶阻尼繞組的永磁同步電機(jī)仍然適用;
3)阻尼繞組產(chǎn)生的感應(yīng)轉(zhuǎn)矩能促進(jìn)電機(jī)調(diào)速,調(diào)速過程超調(diào)量小,進(jìn)入穩(wěn)態(tài)快,但調(diào)速時(shí)電流相對(duì)較大。
[1] Douglas J F H. Induction motors with permanent magnet excitation[J]. Electrical Engineering, 1959, 78(12): 1195-1195.
[2] Douglas J F H. Characteristics of Induction Motors with Permanent-Magnet Excitation[J]. IEEE Transactions on Power Apparatus & Systems, 1959, 78(3): 221-225.
[3] 黃進(jìn), 許大中. 同步電機(jī)的混合模型[J]. 電工技術(shù)學(xué)報(bào), 1990(2): 11-17.
[4] 黃進(jìn), 許大中. 同步電動(dòng)機(jī)變頻調(diào)速系統(tǒng)中阻尼繞組的作用[J]. 電工技術(shù)學(xué)報(bào), 1991(4):1-6.
[5] Flux and torque control of synchronous machine with compensation of inaccuracy due to variations of motor Parameter
[6] 李崇堅(jiān), 李祥珩. 阻尼繞組對(duì)磁場(chǎng)定向控制交—交變頻同步電機(jī)動(dòng)態(tài)行為的影響[J]. 電工技術(shù)學(xué)報(bào), 1995(4): 1-4.
[7] 周揚(yáng)忠, 胡育文, 黃文新,等. 阻尼繞組對(duì)直接轉(zhuǎn)矩控制同步電機(jī)動(dòng)態(tài)行為的影響[J]. 航空學(xué)報(bào), 2005, 26(4):476-481.
[8] 唐任遠(yuǎn). 現(xiàn)代永磁電機(jī)理論與設(shè)計(jì)[M]. 機(jī)械工業(yè)出版社, 2016.
[9] 劉雨石, 喬鳴忠, 朱鵬. 基于空間矢量脈寬調(diào)制的過調(diào)制策略研究[J]. 電機(jī)與控制應(yīng)用, 2017(12): 36-42.
[10] 喬鳴忠, 張曉鋒, 任修明. 帶阻尼繞組的多相大功率推進(jìn)永磁同步電動(dòng)機(jī)繞組參數(shù)的測(cè)量和計(jì)算研究[J]. 電工技術(shù)學(xué)報(bào), 2003, 18(6): 37-41.
[11] 向東, 于飛. 考慮阻尼繞組的五相PMSM數(shù)學(xué)模型及等效電路[J]. 電機(jī)與控制學(xué)報(bào), 2008, 12(6): 644-649.
[12] Shu Y, Hirahara H, Tanaka A, et al. Universal sensorless vector control applicable to line-start permanent magnet synchronous motors with damper winding[C]// Energy Conversion Congress and Exposition. IEEE, 2017。
Study on the influence of damper winding on the running performance of permanent magnet synchronous motor
Peng Lian, Wang Xinlei
(Wuhan marine machinery plant CO.,LTD., Wuhan 430084, China)
TM341
A
1003-4862(2022)11-0044-05
2022-03-25
彭蓮(1987-),女,工程師,研究方向:船用電氣技術(shù)。E-mail:penglian99@163.com
