用于在軌服務的多天線差分GNSS相對定位研究
2022-11-16 00:52:44胡兆俊陳宏宇范森權常亮
航天器工程 2022年5期
關鍵詞:服務
胡兆俊 陳宏宇 范森權 常亮
(1 中國科學院微小衛星創新研究院,上海 200135)(2 中國科學院大學,北京 100049)(3 上海科技大學,上海 201210)
自世界航天技術發展以來,航天器在軌服務技術越來越受到重視。這是由于航天器設計、制造、運輸、發射和空間運行存在各類不確定性因素,即使采用高可靠性設計也難以保證航天器百分百可靠。面對大部分硬件損壞,燃料耗盡問題,往往只能靠制造和發射新的航天器來取代原有航天器,由此造成極大的經濟損失,航天器在軌服務技術是解決這些問題最有效的途徑之一[1-2]。實現高精度、高可靠、高實時的相對導航是執行在軌服務任務的關鍵技術。
基于全球導航星座系統的相對導航技術是該領域重要的發展方向,該技術能夠同時滿足多種軍用/民用航天任務的技術需求,并且其載荷在體積、質量、功耗和成本等方面相對其他技術具有很大優勢。早在20世紀末基于星載GPS技術的航天器相對導航在交會對接試驗中就得到了應用。1998年日本宇宙開發事業集團(NASDA)在工程試驗衛星-7(ETS-VII)任務中首次驗證了基于星載GPS的相對導航技術。在兩星相距10 km~500 m相互逼近的階段以GPS差分偽距測量作為觀測量。試驗取得的相對位置精度在10 m以內,相對速度精度在3 cm/s以內[3]。進入21世紀后,世界各國開展了大量基于GPS測量的衛星編隊飛行試驗。如2000年由英國薩瑞衛星技術公司設計制造的納米衛星(SNAP-1)和我國的清華-1(Tsinghua-1)衛星構成的衛星編隊[4],2000年的美國星載GPS相對測量在軌飛行試驗的代表性研究重力場測量(GRACE)衛星編隊等[5]。2012年10月14日,我國以一箭雙星方式將實踐九號A/B(SJ-9A/B)衛星成功送入離地高度為623 km/650 km的太陽同步軌道。2012年10月底,SJ-9A/B首次完成了雙星編隊飛行和高精度GPS星間基線測量試驗。在星間基線為1.5~5 km范圍內,星載濾波算法基于差分GPS載波相位測量獲得了優于3 cm的相對定位精度。綜上所述,差分GNSS星間相對定位的應用越來越成熟,對任務航天器由遠及近的高精度引導起到了重要作用。但是對于在軌服務任務,往往涉及到對目標航天器的近距離繞飛觀察,此時天線由于姿態變換無法穩定對天,導致了因任務航天器與目標航天器共視導航衛星數量不足而產生的差分中斷問題。
文獻[6]基于描述衛星相對運動的C-W方程對星間相對位置和相對速度進行卡爾曼濾波估計,使用軌道動力學與差分GNSS相結合的方法使得相對定位數據具有時間連續性和平穩性。該方法對于短暫的差分GNSS中斷具有一定的抗干擾性。但是在軌服務任務往往涉及到連續的軌道機動,此時載波相位差分可能陷入長時間的中斷。此外,基于多源信息融合的相對導航在一定程度上也可以克服缺失GNSS信號帶來的影響[7]。
本文基于矢量運算原理設計了天線間組合差分的方法,該方法可以有效增加差分GNSS數據觀測量,使得執行在軌服務任務航天器在近距離繞飛目標航天器時能夠有穩定的差分GNSS數據輸出。
1 在軌服務場景構建與坐標系定義
1.1 在軌服務場景建模
本節介紹由A、B雙星構成的在軌服務任務場景,包括軌道六根數的設置以及動力學場景。設B星為一顆在軌出現故障的科學試驗衛星,其軌道六根數見表1。
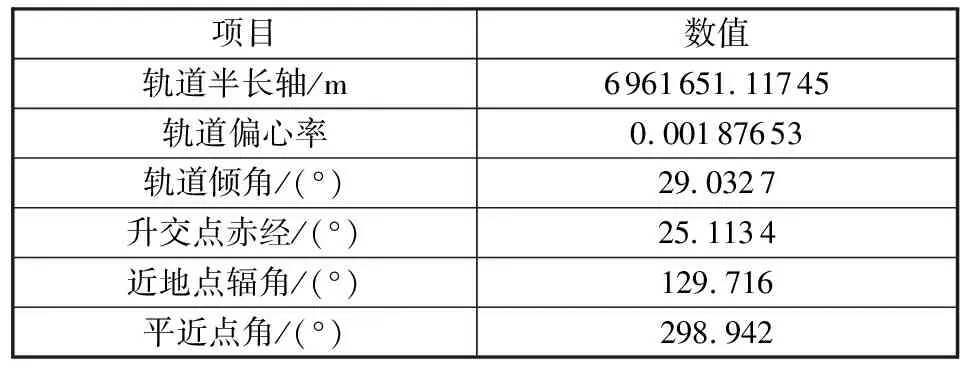
表1 衛星B軌道參數設置
A星為作業星,通過懸停、直線抵近、10 m繞飛3個階段逐步接近并觀察B星。本文通過B星載具速度局部水平(Vehicle Velocity Local Horizontal, VVLH)坐標系描述雙星相對運動,定義見1.2.1節。A星在以B星質心為中心的VVLH坐標系下各階段相對于B星的距離如圖1所示。

圖1 A、B星相對距離
全流程B星保持穩態對天,A星懸停、抵近段保持對天。繞飛階段,A星俯仰角由0至360°變化,偏航角與滾動角變化為0,以保持光學載荷對B星進行持續觀察采集數據,A星在B星軌道面內相對運動示意如圖2所示。
從圖2可知,繞飛時的俯仰姿態變化必然會導致A星天線覆蓋天區的不斷變化,從而使得與B星的共視天區逐步減少。
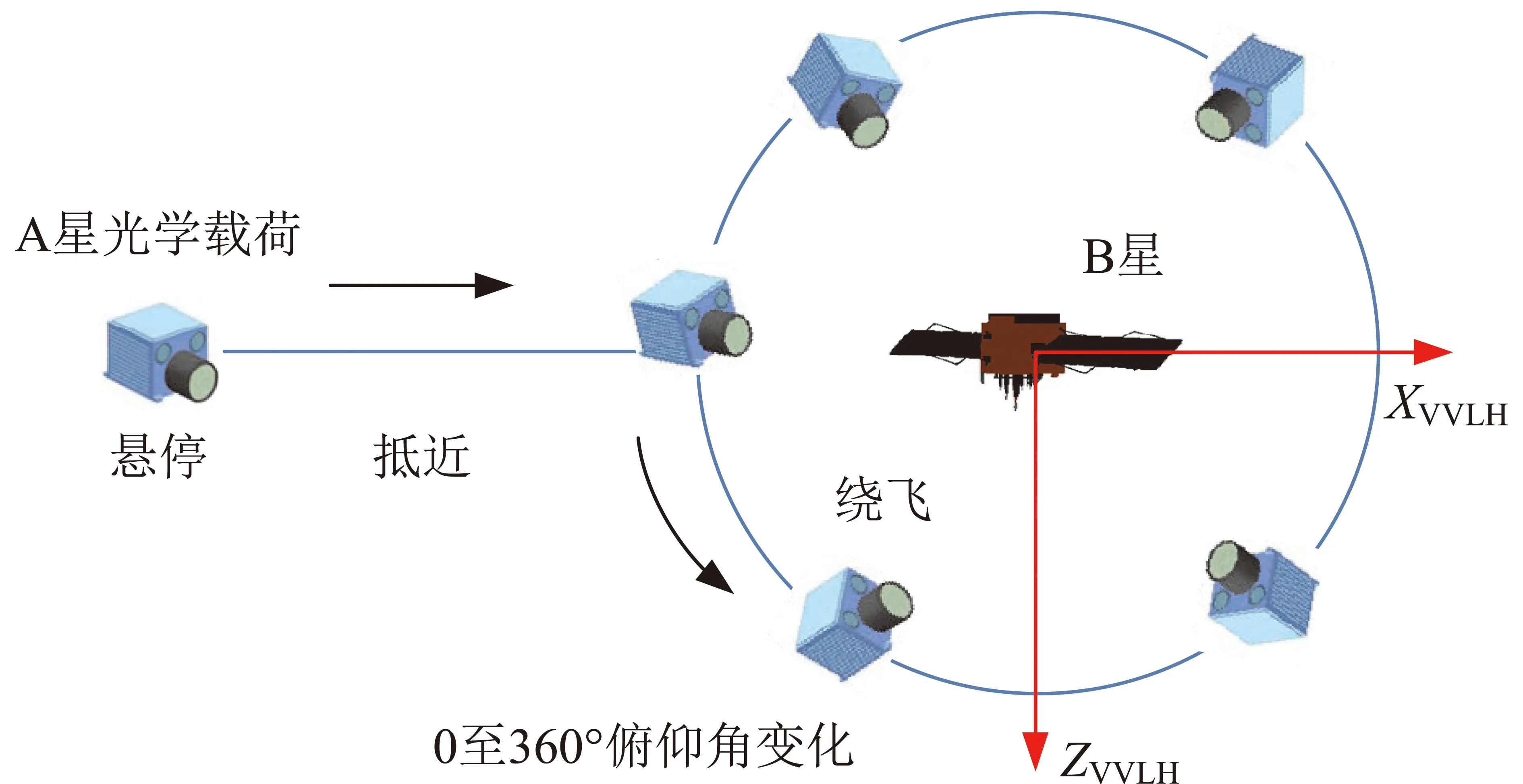
圖2 A、B星相對運動二維示意圖
1.2 坐標系定義
1.2.1 VVLH坐標系
VVLH坐標系是軌道坐標系的一種,可以直觀反映雙星相對位置。其定義如下:坐標系原點為衛星本體質心;XVVLH軸沿衛星飛行方向,由YVVLH×ZVVLH確定;YVVLH軸為軌道面負法向;ZVVLH軸指向地心方向,如圖3所示。
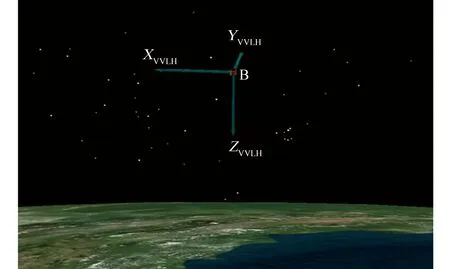
圖3 VVLH水平坐標系示意圖
1.2.2 ECEF和NED坐標系
地心地固直角(ECEF)坐標系,簡稱地心地固坐標系,其定義是:原點OECEF與地球質心重合;ZECEF軸地球自轉軸重合并指向北極;XECEF軸指向格林尼治子午面與赤道的交點;YECEF軸垂直于XECEFOECEFZECEF平面并與XECEF、ZECEF軸構成右手坐標系,如圖4所示。在導航定位方程中,用戶(例如GNSS接收機)和衛星的坐標系都采用該坐標系描述,導航星模擬器的相關參數也定義在ECEF系下。
北東地(NED)坐標系,也叫做導航坐標系,是在導航時根據導航系統工作的需要而選取的用于導航解算的參考坐標系。其坐標原點通常選取載具的質心,XNED軸指向地球北,YNED軸指向地球東,ZNED軸垂直于地球表面并指向下,如圖4所示。本文將NED坐標系做為過渡坐標系,將本體系的坐標轉換到ECEF系。
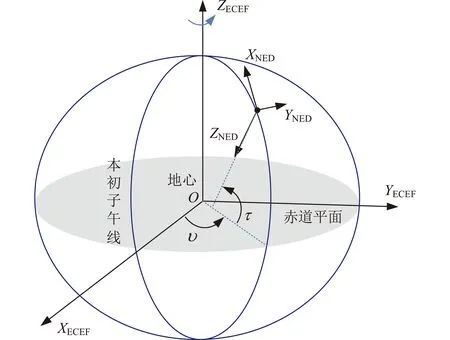
圖4 ECEF和NED坐標系示意圖
1.2.3 本體坐標系
衛星的本體坐標系嚴格附著在衛星之上。本體坐標系與NED坐標系相似,伴隨著運動體運動,但是不同之處在于本體系會隨載體的姿態變化而旋轉,而NED坐標系不會。本體坐標系的原點為衛星的質心,3個坐標軸在偏航角、滾動角和俯仰角為零時,Xb軸指向飛行方向,Zb軸指向地心,Yb軸和Xb、Zb軸構成右手坐標系,如圖5所示。
圖5中,本體系隨Xb軸旋轉產生的角度為滾動角,右滾動為正;隨Zb軸旋轉產生的角度為偏航角,右偏航為正;隨Yb軸旋轉產生的角度為俯仰角,向上為正。注意本文本體系姿態角參考系為NED。
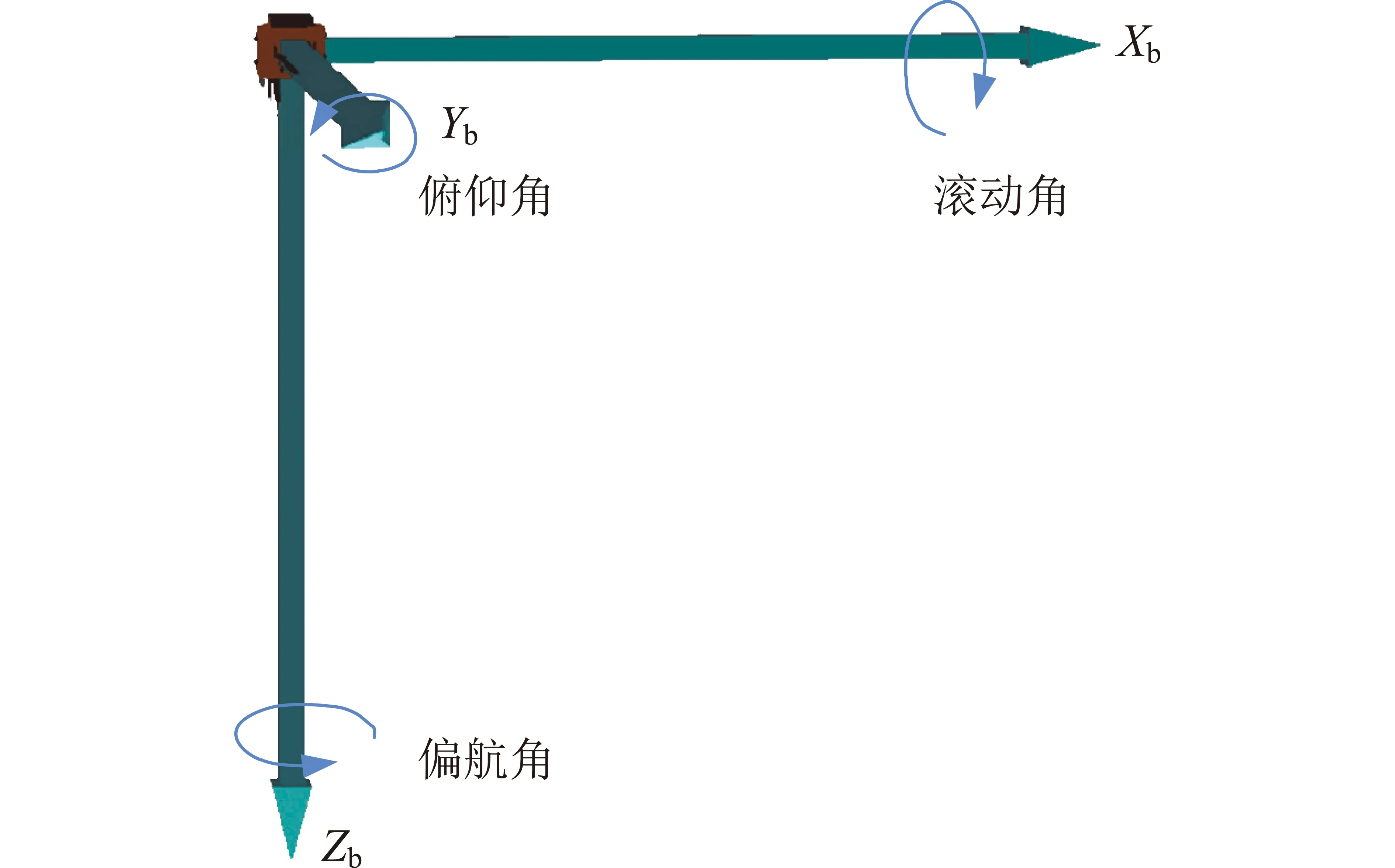
圖5 本體坐標系示意圖
2 三天線觀測量組合差分
2.1 三天線觀測量組合原理
導致A星近距離繞飛觀測時差分中斷的原因主要是A星各天線與B星天線共視觀測量不足造成的,因此將三天線的觀測量進行組合,獲得更多的共視觀測量是對該問題的一種解決思路。本節介紹基于向量運算原理將三天線觀測量歸算至同一天線的方法(實際可歸算到任一點)。如圖6所示,設兩天線安裝位置矢量為r(在衛星本體系下定義),某一時刻GNSS接收機即時測得的天線1相位中心在ECEF系中到GNSS衛星的矢量為d1,則換算到天線2處的測距觀測值d2為
d2=|SMr+d1|
(1)
式中:M為坐標變換矩陣,用于將本體系下的坐標轉換至NED坐標系(注意此處GNSS接收機獲得的本體系姿態信息是由導航星模擬器提供的,導航星模擬器生成的姿態信息已經轉換為NED參考系),由航天器本體系下的姿態(俯仰角θ、滾動角φ和偏航角ψ)信息構成。具體表達式為
(2)
S也為坐標轉換矩陣,用于將NED系下的坐標轉換至ECEF系,和衛星星下點經度υ和緯度τ相關,如圖6所示。具體表達式為[8]
(3)
試驗過程中航天器姿態信息將由動力學仿真機轉換至導航星模擬器(應用參考系NED描述姿態)后給出。矢量r由天線相位中心在本體系下相對質心的坐標給出,導航星模擬器設置的A星三天線相位中心相對于衛星質心相對坐標見表2。
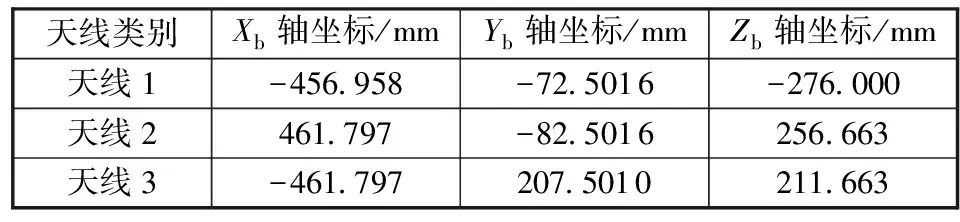
表2 A星三天線相位中心位置坐標
經式(1)轉換后,天線2的觀測量將增加, 示意如圖6所示。
圖6中Xb,Yb,Zb坐標軸代表姿態為俯仰角θ、滾動角φ和偏航角ψ下的本體系坐標軸。可見圖6中天線2的載波相位觀測量增加,與目標航天器之間的共視衛星數也會增加,從而能夠獲得足夠的雙差載波相位方程用以支撐相對位置解算。在軌三天線觀測量組合示意如圖7所示。
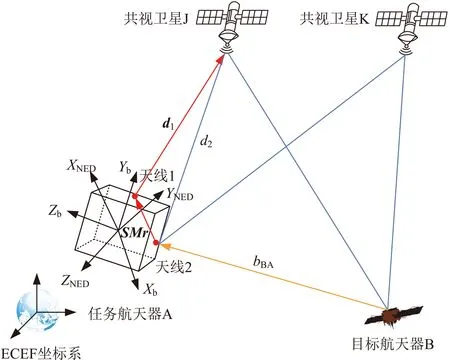
圖6 天線觀測量換算示意圖
圖7中B星可見衛星S2~S7,三天線不歸算時天線2與B星共視衛星為S4~S6,數目最多但少于5顆,不滿足差分要求。三天線歸算至天線2后,B星可見衛星S2和S3也會成為天線2的可見衛星,從而滿足差分解算方程對共視衛星的數量要求。

圖7 三天線觀測量組合示意圖
2.2 差分GNSS相對定位主要過程
在軌服務差分GNSS相對定位的主要過程如圖8所示。
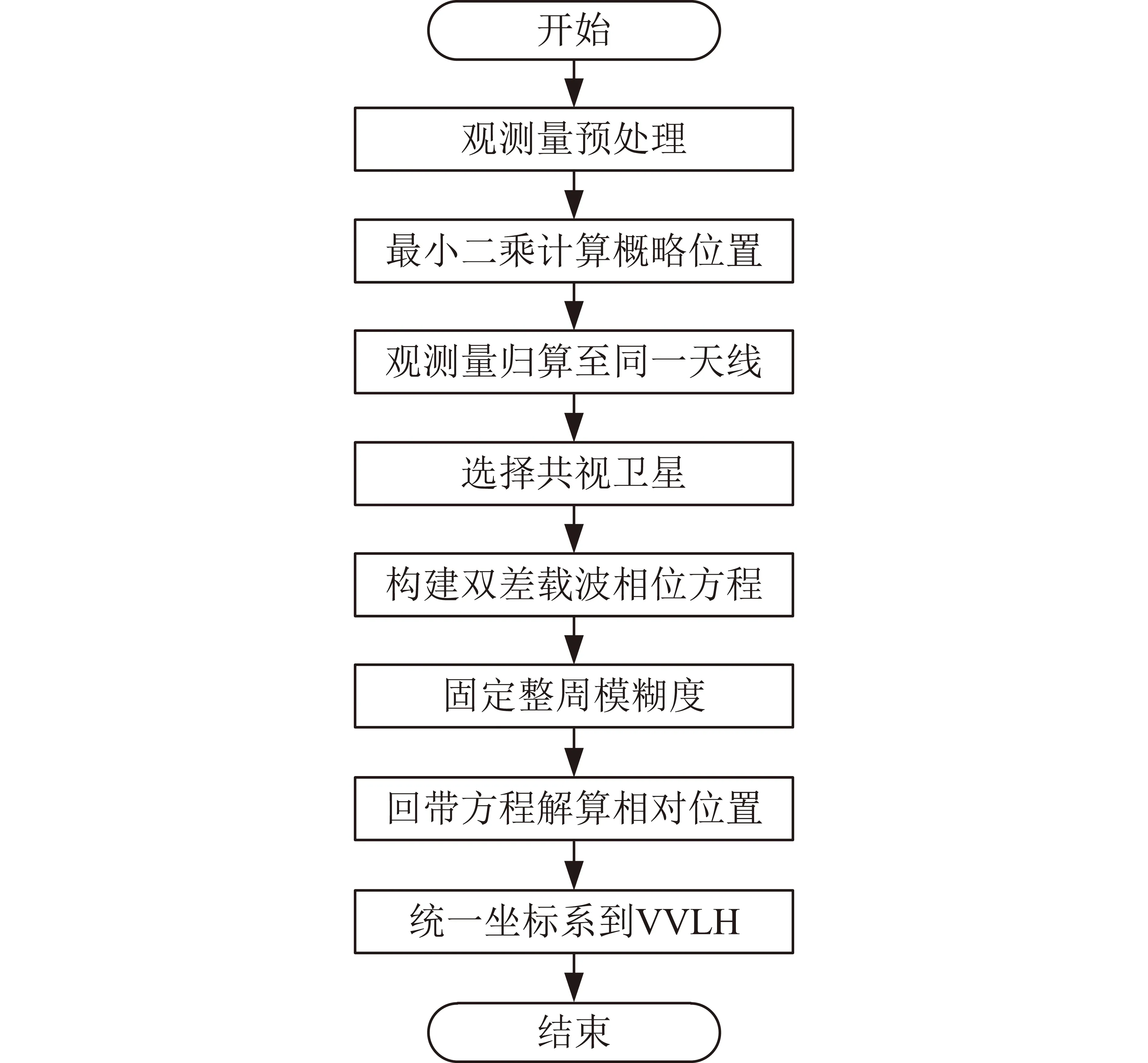
圖8 算法主要步驟
其中觀測量歸算至同一天線對應2.1節的方法。本小節將概略介紹雙差載波相位方程的構建、固定整周模糊度與統一坐標系到VVLH坐標系的思想,具體如下。
1)構建雙差載波相位方程
載波相位測量的觀測值是接收機所接收的衛星載波信號與本地參考信號的相位差,但載波相位觀測值并不準確,存在信號傳輸電離層延遲、對流層延遲,以及接收機鐘差和導航衛星鐘差。對于載波相位觀測方程存在的一些誤差可以通過站間單差與星間雙差進行有效的消除,單差可以徹底消除導航衛星的鐘差,雙差能進一步消除接收機鐘差。考慮到在軌服務任務執行的區域往往高于400 km,此時電離層與對流層的延遲可以忽略不計,另外在雙接收機相對位置較近且高度基本相同時,單差電離層延遲與單差對流層延遲也基本近似為零。因此在軌服務場景下的雙差觀測方程可表示為[9]

(4)

2)固定整周模糊度
φ=TΔbBA+PN
(5)

3)統一坐標系到VVLH
為了雙星相對定位結果更為直觀,本文將差分GNSS接收機相對位置數據轉換到目標星VVLH系下,同時一方面導航衛星運行在地心地固坐標系下,另一方面衛星的軌道是定義在地心慣性坐標系下的,因此涉及到地心地固系轉地心慣性系[9],以及地心慣性系轉VVLH系[12]。
3 仿真分析
3.1 半物理仿真系統
在軌服務多天線差分GNSS半物理仿真系統由兩臺雙通道思博倫GSS7000導航星模擬器、動力學仿真機、GNSS接收機、差分GNSS接收機和控制與分析計算機組成。連接示意如圖9所示。
圖9中姿態軌道動力學仿真機用以輸出A、B星軌道動力學數據,動力學控制計算機發送動力學指令,兩臺雙通道導航星模擬器模擬A星的天線1、天線2、天線3和B星的天線(與VVLH系指向一致)所接收的導航星信號。GNSS接收機由B星攜帶視為移動基站差分GNSS接收機由A星攜帶,通過星間通信連接基站與差分GNSS接收機進行計算。最終通過統一到VVLH系下的差分相對位置數據與動力學仿真機相對位置數據作比較獲得差分相對位置的精度。
本文設計了兩種試驗工況:一種是單天線切換差分;另一種是三天線組合差分。兩種工況環境設置(衛星軌道、導航星模擬器參數以及天線位置等)相同,差別在于差分GNSS接收機對于載波相位觀測量的計算邏輯。兩種工況的試驗流程一致,只接入北斗導航星座信號,軌道動力學起點相同,星上時間起點相同,如圖1所示,試驗數據分析見3.2節。
3.2 單天線切換差分數據分析
單天線切換差分即通過A星三天線輪循查找差分成功的天線輸出相對位置結果(多個天線成功則選擇共視衛星多的天線輸出結果,多個天線失敗則返回天線1的狀態),試驗全流程天線切換情況、共視衛星數量如圖10、圖11所示。
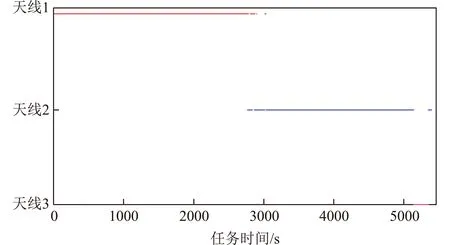
圖10 A星單天線切換示意圖
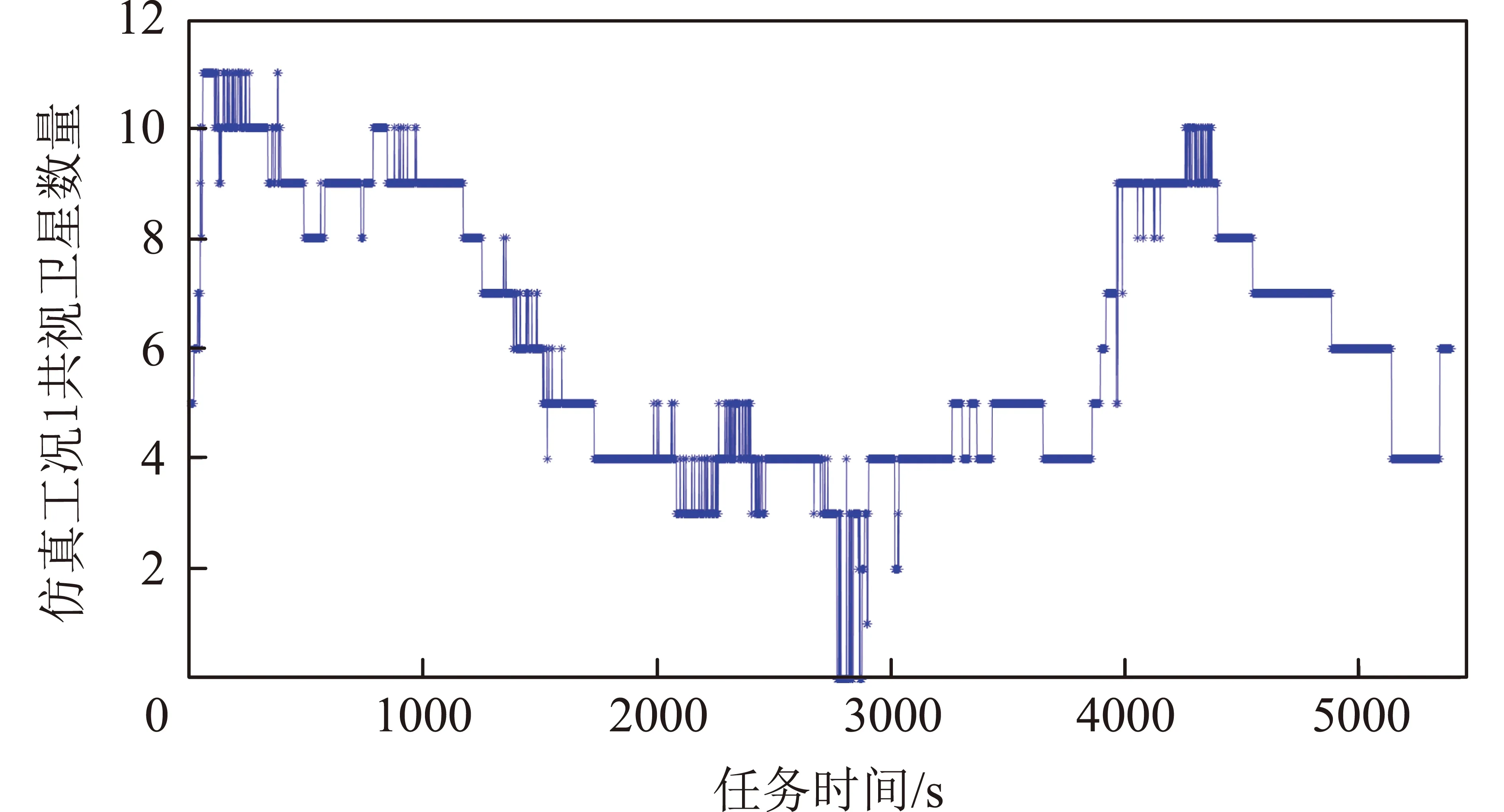
圖11 仿真工況1共視衛星數量
通過差分GNSS接收機相對位置數據結果與動力學仿真相對位置數據做差得出誤差結果如圖12所示。
從試驗結果可知,雖然三天線發生了切換,但全流程A星差分天線與B星天線共視衛星數長時間不足5顆,使得差分解算方程個數不足,從而導致如圖12所示的差分中斷,這進一步會導致軌控失敗,使任務衛星進入安全模式從而影響整個在軌服務任務。導致這一問題的原因:一方面是俯仰機動使得A星三天線都不朝天,即使能收到北斗導航星信號,但是與B星天線的共視衛星數不足;另一方面試驗任務的前半段離亞太地區較遠,北斗導航星信號較弱,這使得收星數較少(在軌服務任務的軌道一般要考慮光照、數傳等條件,要盡量保證數傳段在亞太地區上空);此外當A星于3000 s左右運動到B星正下方時,B星的遮擋也使得天線信號不佳。
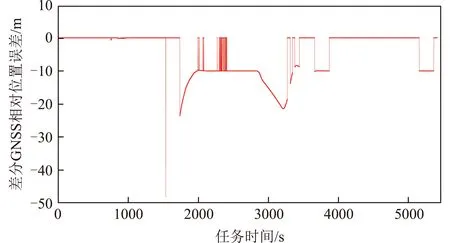
圖12 單天線切換差分GNSS相對位置誤差數據
3.3 三天線組合差分數據分析
三天線觀測量組合模式下的共視衛星數與差分結果如圖13、圖14所示。

圖13 仿真工況2共視衛星數量

圖14 三天線觀測量組合差分GNSS相對位置誤差數據
對比圖11和圖13,可以看到該方法有效提升了共視衛星數量。同時三天線觀測量組合模式下的差分數據對比三天線擇優模式穩定性有了極大的提升。圖14中仍然存在的一些斷點是由載波相位門限值過低、共視衛星的切換等異常情況導致的,但比較單天線觀測結果,已經可以通過軌控算法進行過濾。
4 結束語
針對執行在軌服務任務中的航天器姿態運動引起天線接收區快速變化導致的與目標航天器共視衛星數不足的問題,本文設計了一種三天線觀測量組合差分的方法。此外,設計了在軌服務任務場景,搭建了半物理仿真系統模擬在軌服務任務中差分GNSS工作狀態。通過仿真系統分析了近距離姿態變化下單模差分GNSS存在的問題,發現即使設計多天線切換差分的效果也不理想。經過試驗驗證,三天線觀測量組合差分能夠有效提升共視衛星的數量。同時在試驗過程中發現當天線相位中心偏離過大時,三天線組合差分的整周模糊度固定成功率會下降,如何提升該方法抗天線相位中心偏離干擾的能力是進一步研究的方向。該方法可為基于差分GNSS進行相對導航的在軌服務任務提供一定的參考。
猜你喜歡
杭州金融研修學院學報(2022年5期)2022-06-15 11:41:48
今日農業(2019年14期)2019-09-18 01:21:54
今日農業(2019年12期)2019-08-15 00:56:32
今日農業(2019年11期)2019-08-13 00:49:08
今日農業(2019年13期)2019-08-12 07:59:04
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年15期)2019-01-03 12:11:33
今日農業(2019年16期)2019-01-03 11:39:20
銅仁學院學報(2018年4期)2018-06-13 03:21:34
商周刊(2017年9期)2017-08-22 02:57:56
