全驅動自主水下機器人回收路徑跟蹤模糊滑模控制
2022-11-18 08:01:42曾慶軍姚金藝朱志宇馬洪潮
船舶與海洋工程 2022年5期
潘 偉,曾慶軍,姚金藝,朱志宇,夏 楠,馬洪潮
(江蘇科技大學電子信息學院,江蘇 鎮江 212100)
0 引 言
近年來,海洋資源的大力開發和利用為各種海洋工程裝備的設計和制造創造了有利條件[1]。自主式水下機器人(Autonomous Underwater Vehicle,AUV)是海洋開發領域的重要工具之一,具有機動性好和巡航范圍大等優點,隨著信息技術的不斷發展,其在軍事和科學研究領域的作用越來越重要。然而,受自身能源的限制,AUV的作業時間有限,這就需及時回收機器人,對其進行能源補給和維修[2]。路徑跟蹤對AUV精準執行使命、順利完成回收等任務具有重要影響。
深水海域的油氣資源比較豐富,為更好地開發油氣資源,世界各國都在大力發展深水作業技術[3],從一開始的試驗型機器人,到能投入生產和應用的產業化機器人,研制出了多種具有不同結構和功能的水下機器人。國外比較著名的水下機器人研究機構[4]有美國MIT Sea Grant AUV實驗室和日本東京大學水下機器人應用實驗室(Underwater Robotics Application Laboratory)等;國內比較先進的水下機器人研究機構[5]有中國科學院沈陽自動化研究所、哈爾濱工程大學和中國海洋大學等。目前,已有很多學者圍繞上述問題,針對AUV的三維路徑跟蹤開展研究。例如:王曉偉等[6]采用反步法設計了水平面跟蹤控制器,利用微分器對未知狀態和不確定項進行了估計;劉昌鑫等[7]采用非線性模型預測控制方法設計了AUV的約束路徑跟蹤控制律,以解決有約束路徑跟蹤控制問題。路徑跟蹤控制主要是將其解耦為水平面(橫向)控制和垂直面(垂向)控制,本文以自主研發的“探海Ⅱ型”全驅動AUV為研究對象,對水平面控制方法進行研究,采用模糊滑模路徑跟蹤控制器增強AUV在回收過程中的抗干擾性能。
1 “探海Ⅱ型”全驅動AUV數學模型
1.1 回收控制系統概述
“探海Ⅱ型”全驅動AUV樣機具有跟蹤精度高和控制靈活等特點,其對接系統由對接塢系統和AUV系統2部分組成。AUV本體控制系統主要由導航模塊、控制模塊、推進模塊、雙目視覺處理單元和電源模塊組成,其中導航模塊主要包括全球定位系統(Global Positioning System,GPS)、光纖慣導、多普勒計程儀和深度計,在對接時,額外介入超短基線和雙目視覺定位數據進行數據融合導航。該型AUV含有5臺推進器,屬于全驅動型AUV。
對接塢控制系統主要負責采集對接塢傳感器的數據,并將其發送給干端監控臺,同時可通過通信定位一體機向水下機器人發送信息和指令。對接塢控制系統主要由密封殼體、水密插座、電源模塊、采集計算機、網絡交換機和搭載的傳感器組成,其中搭載的傳感器包括GPS、深度傳感器、姿態傳感器、漏水傳感器、標志燈、水下攝像頭、通信定位一體機(安裝在對接器上)和限位傳感器(安裝在對接器上)等。在對接階段,AUV與對接塢通過超短基線的無線通信功能進行信息交互。圖1為“探海Ⅱ型”全驅動AUV回收對接系統。

圖1 “探海Ⅱ型”全驅動AUV回收對接系統
1.2 坐標系
水下機器人建模包含運動學建模和動力學建模2部分,通過運動學解釋物體在運動過程中的位置、速度和加速度的幾何關系,通過動力學分析機器人在加速運動過程中的動力變化。在討論AUV運動模型時,通常要建立2個參考系,即大地坐標系(E-ξηζ)和運動坐標系(O-xyz)。圖2為AUV運動坐標系和大地坐標系示意圖,其中:大地坐標系的原點E在水平面上,ξ軸指向地理北向,η軸指向地理東向,ζ軸指向地心;運動坐標系的原點在AUV上,x軸、y軸和z軸分別指向AUV的艏部、右舷和底部。
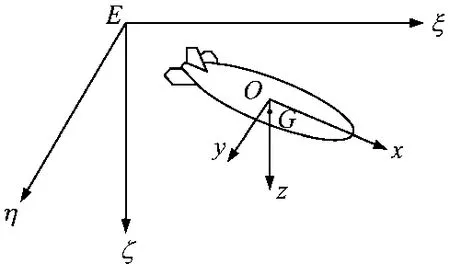
圖2 AUV運動坐標系和大地坐標系示意圖
1.3 垂直面模型
本文所述數學模型主要來源于Timothy Prestero提出的REMUS型水下機器人的仿真模型,AUV的運動學方程以浮心作為運動坐標系原點,剛體六自由度空間運動方程為
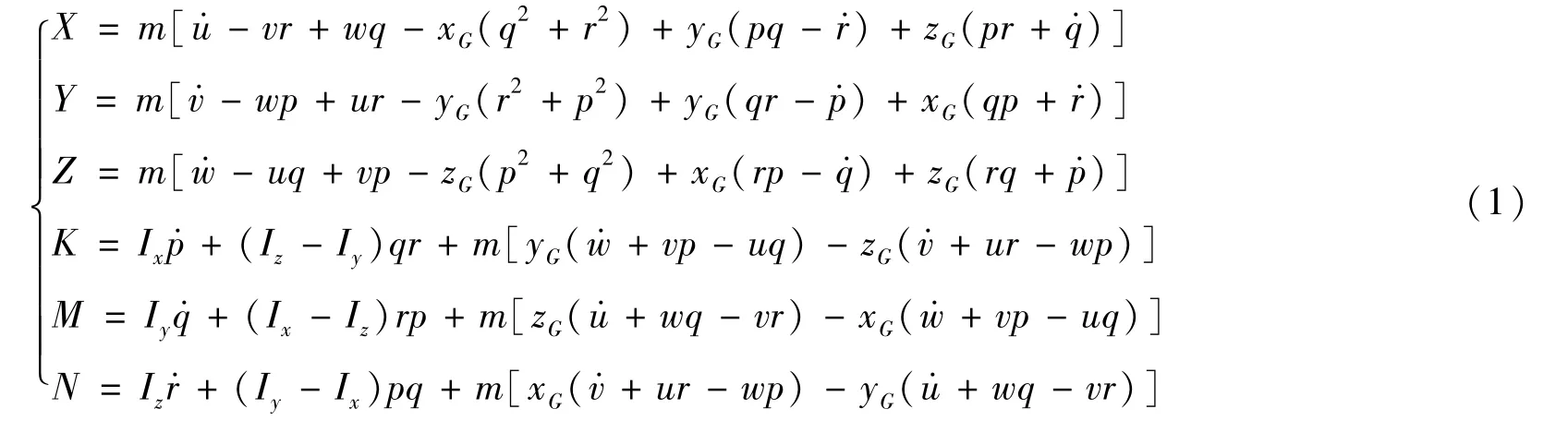
式(1)中:m為AUV本體的質量;xG、yG和zG分別為AUV的重心在3個坐標軸上的坐標;Ix、Iy和Iz分別為AUV在3個坐標軸上的轉動慣量;u、v和w分別為AUV的速度在3個坐標軸上的分量;p、q和r分別為AUV的角速度在3個坐標軸上的分量。
基于AUV六自由度模型,可得到簡化的AUV垂直面運動方程。
1)z軸方向的浮潛運動學方程為

2)y軸方向的縱傾運動學方程為

式(2)和式(3)中:Fi為高斯白噪聲;Zw|w|、Zq|q|、Zuq、Zuw、Mw|w|、Mq|q|、Muq、Muw、Mw·、Mq·、Zw·和Zq·為水動力參數;Zg為z軸方向的受力;Mg為重力;Zprop和Mprop分別為z軸方向的推力和y軸方向的推力矩;xg和zg為重心坐標。
1.4 水平面模型
在w=0,p=0,q=0的條件下,首先簡化得到水平面AUV的運動學方程。
1)x軸方向的進退運動學方程為

2)y軸方向的平移運動學方程為

3)z軸方向的轉艏運動學方程為

式(4)~式(6)中:Xu|u|、Xu·、Xvr、Xrr、Yv|v|、Yv·、Yvr、Yuv、Nv|v|、Nr|r|、Nr·、Nur和Nuv為水動力參數;Xprop、Yprop和Nprop為各自方向上的力和力矩。
1.5 環境干擾
通常情況下,干擾為風、浪、流,AUV在水下作業時的主要干擾來自流。水流只影響水動力作用的輻射力,若水流速度為U(ux,uy,uz),機器人速度為UAUV(u,v,w),水流對機器人的影響也可看作機器人相對水流反方向的運動,相對運動速度vr可表示為

一般不考慮垂向水流,可類似回復力對水平方向的水流進行求解。
2 基于模糊滑模的路徑跟蹤控制器設計
2.1 水平面控制器設計
AUV水平面控制有兩大問題:一是非線性模型的不確定性;二是洋流波浪的隨機性。滑模控制不僅能很好地解決AUV控制系統的不確定性問題,而且對外界干擾響應不靈敏,具有很強的魯棒性,但其帶來的抖振問題難以解決。
若給定AUV水平面期望值為

式(8)中,ψ為航向角。則跟蹤誤差e為

得到跟蹤誤差的一階導數為

選取滑模面函數

選取滑模控制指數趨近律為

根據水平面控制模型,取

可得

整理得到控制律

將滑模控制器中趨近律的符號函數用模糊控制的輸出代替,以解決滑模控制帶來的抖振問題,即

將滑模控制器中趨近律的符號函數用模糊控制的輸出代替,該模糊控制為單輸入單輸出,輸入為e,輸出為fuz(s),因此定義的輸入輸出論域為

模糊語言變量為NB(負大)、NM(負中)、NS(負小)、ZO(零)、PS(正小)、PM(正中)和PB(正大)。選取的輸入和輸出的范圍為[-3,3]。隸屬度函數選取三角形隸屬函數,解模糊策略選取重心法。
模糊規則如下:
1)If A=NB,then B=NB;
林徽因也懇求保住永定門,她聲嘶力竭地痛斥:“你們現在拆了真古董,等有一天你們后悔了,只能蓋個假古董了。”然而她的懇求無效,真古董最終還是被無情地拆除了。
2)If A=NM,then B=NM;
3)If A=NS,then B=NS;
4)If A=ZO,then B=ZO;
5)If A=PS,then B=PS;
6)If A=PM,then B=PM;
2.2 垂直面控制器設計
AUV垂直面控制采用S面控制方法。S面控制器的控制模型為

式(18)中:k1和k2為控制系數,可將其類比為PID(Proportional Integral Derivative)控制器中的PD系數;Δu為調整項,可將其看作一段時間內的固定干擾力或其他調整因素;e和為控制輸入信息,e在AUV中看作深度和艏向角誤差信息在AUV中看作深度和艏向角誤差變化率;u為控制輸出,在AUV中看作對應推進器的推力和轉矩。
3 AUV三維路徑跟蹤控制仿真及湖試
3.1 三維路徑跟蹤控制仿真分析
分別設計模糊滑模控制器和PID控制器,并采用MATLAB對AUV進行水下六邊形路徑跟蹤仿真。仿真采用的參數是“探海Ⅱ型”全驅動AUV水動力等模型參數。主推進器給定恒定推力,目標深度為3 m,定常洋流速度為0.1 m/s。AUV三維路徑跟蹤仿真結果見圖3。AUV切換目標航線時會產生一定的超調,出現超調會使AUV的跟蹤路線產生誤差,從而導致這2種控制器的跟蹤時間不一致;模糊滑模控制器在海流干擾下的三維路徑跟蹤性能優于PID控制器。表1為AUV六邊形跟蹤平均誤差,給出了模糊滑模控制器和PID控制器跟蹤六邊形時每條邊跟蹤的平均誤差。
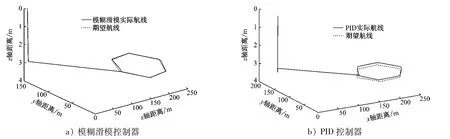
圖3 AUV三維路徑跟蹤仿真結果

表1 AUV六邊形跟蹤平均誤差
3.2 湖試及結果分析
湖試在蘇州某湖進行,試驗環境良好,水質清澈且湖底平坦,水深范圍為5~20 m,湖水流速約為2 kn。設計AUV的航速為0.8 kn,下潛深度為1 m,設置的GPS初始經緯度坐標為(120.560 356 1°E,31.892 150 88°N),返航目標經緯度坐標為(120.560 150 1°E,31.892 097 47°N),任務總時長為9 min。圖4為湖試試驗圖;表2為AUV三維路徑跟蹤試驗部分數據。

表2 AUV三維路徑跟蹤試驗部分數據
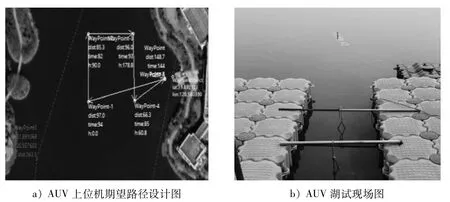
圖4 湖試試驗圖
圖5為AUV三維路徑跟蹤曲線。從圖5中可看出,AUV可按設定的軌跡由起始點A出發,下潛至點B開始自主導航,依次經過點C、點D和點E之后上浮并行進到回收塢所在的點F處完成對接。AUV轉彎時,其主推進器始終處于運行狀態,存在一定的慣性,因此在進行直角跟蹤導航時需要一定的反應時間,從而回到預設的軌跡上。表3為深度、航向角和縱傾角誤差分析結果。從表3中可看出,AUV的跟蹤效果較好,縱傾角和航向角誤差均值小于8°,深度誤差均值小于0.1 m。
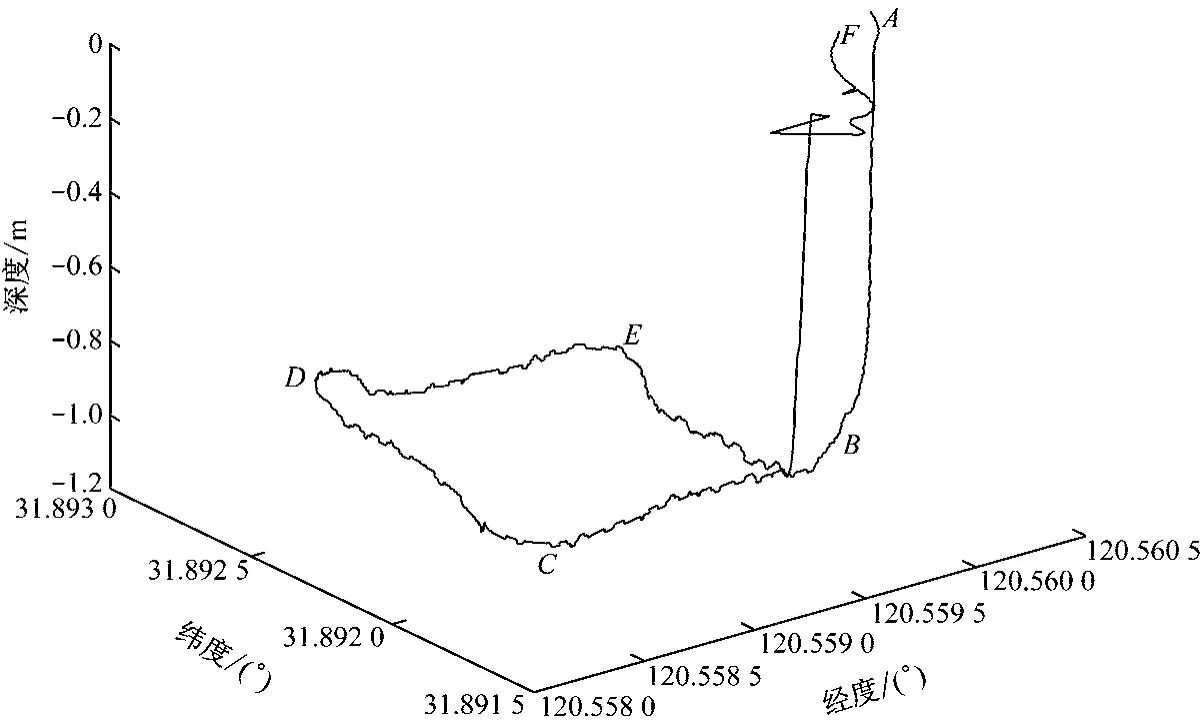
圖5 AUV三維路徑跟蹤曲線

表3 深度、航向角和縱傾角誤差分析結果
4 結 語
路徑跟蹤作為AUV的重要功能,一直是國內外學者研究的熱點。本文介紹了“探海Ⅱ型”全驅動AUV的回收控制系統,針對其垂直面、水平面和環境干擾建立了數學模型。水平面艏向角控制采用滑模控制器;考慮到海流干擾和滑模控制帶來的抖振問題,引入模糊控制取代滑模控制中趨近律的符號函數;垂直面采用S面控制。仿真分析和湖試結果表明,該AUV運行穩定,設計的控制器有效,能較好地完成三維路徑跟蹤任務,滿足全驅動AUV的水下實際任務需求。