基于樂博士EV3機器人測量物體運動瞬時速率的實驗設計與研究
2022-11-21 12:28:56周穎怡楊曉琳
無線互聯科技 2022年18期
周穎怡,楊曉琳
(嶺南師范學院,廣東 湛江 524048)
0 引言
物理實驗教學中,利用實驗器材測量物體的瞬時速度是一項重要的物理實驗,通常測量的是物體的平均速度,但難以具體描述物體移動瞬間的變化情況,可以通過測量瞬時速度了解物體瞬時的變化情況。筆者在對測量物體運動速度的瞬時實驗分析時發現,實驗過程中的實驗步驟和數據繁多。因此,嘗試利用樂博士EV3機器人測量物體運動瞬時速率,以探究實驗過程的可行性;并對比傳統實驗,分析使用樂博士EV3機器人進行實驗的優缺點。
1 測量物體運動瞬時速率的研究現狀
運動瞬時速度可以作以下理解,根據公式理解,物體運動的時間點的間隔△t截取得越來越小時,該單位時間范圍內的瞬時平均直線速度會越來越趨向某一個固定數值,當△t越趨向于0,原來的勻變速直線運動可看作是勻速直線運動現象來分析,因此該時間段的速度也被看作是物體在該點的瞬時速度。通常把瞬時速度看作是靜止物體在連續運動后達到某一點(位置)的速度,瞬時速度的大小可稱作瞬時速率[1]。勻速運動或直線加速運動通常作為實驗研究對象。從物理含義上看,瞬時速度指某一時刻附近極短時間內的平均速度。瞬時速率沒有方向,只有大小之分,是物理學中的標量概念。
國內外物理實驗中,實驗室測量物體運動瞬時速率的方法主要有3種:方法一,使用打點計時器測量物體瞬時速度;方法二,使用光電門和氣墊導軌測量物體瞬時速度;方法三,使用阿托武德機測量瞬時速度[2]。
近幾年,不少學者嘗試對該系列實驗方式進行創新和改進[3]。在此,筆者基于傳統物理實驗測量瞬時速度的方法,探究應用樂博士EV3進行該物理實驗的可行性。
2 樂博士EV3機器人
樂博士EV3機器人是第三代MINDSTORMS機器人,配有EV3智能主機、各類傳感器、電動馬達、積木零件(齒輪、輪軸、橫梁、插銷)等。使用者可根據個人需求利用EV3機器人,搭建不同的機器人,通過編寫程序使機器人按指令執行任務[4]。與其配套使用的軟件為EST,是一款以圖形方式編寫的教學機器人程序[5],使用者可以從程式設計工具條中選取一種特殊的模組,將模組拖至程式設計模組的程式設計區。程序設計中有序列和數據傳送的關系,序列關系限制了模塊的功能執行次序,數據的傳遞關系則限制了程序邏輯中的數據流向,而編程區可以表達兩者之間的關系。
3 實驗設計與研究
樂博士EV3套件有配套的軟、硬件及眾多傳感器,可以借此進行數字化實驗設計,驗證或改進學科實驗,了解實驗在科學研究中的作用[6]。傳統的實驗教學方法是利用打點計時器或光電門氣墊導軌測量物體運動瞬時速率。為探究EV3能否優化傳統物理測量實驗,改善傳統物理實驗的不足,進行同時雙軌制實驗,一邊利用量尺測量小車長度并用秒表測量小車通過時間,一邊利用樂博士EV3機器人開展以下實驗,進而達到驗證利用樂博士EV3機器人進行實驗的準確性。
實驗目的:利用樂博士EV3機器人測量物體運動瞬時速率,探究實驗數據的準確性,分析EV3機器人在物理實驗中的可行性。

實驗器材:樂博士EV3機器人套件和計算機。
實驗裝置:測量物體運動瞬時速率的實驗裝置如圖1所示。

圖1 EV3測量物體運動瞬時速率實驗裝置
實驗過程:
(1)用量尺測量小車車身長度。
(2)依次先后打開樂博士EV3測速儀程序塊(見圖1右側裝置)及小車程序塊(見圖1左側裝置),開啟測速儀程序。
(3)打開樂博士EV3,開啟小車直行程序。
(4)測速儀檢測到小車出現及檢測到小車離開,都會發出不同的聲音進行通知,用秒表測量小車經過的完整時間并記錄下來;程序塊內通過預先設定的程序計算小車的瞬時速率并顯示在測速儀程序塊屏幕上,及時記錄數據。
(5)重復進行多次實驗,取平均值。
4 實驗設備總體設計
樂博士EV3小車由EV3程序塊、大型電機、光滑角梁、插銷、輪軸、小車輪轂、小車輪胎等拼裝而成。
樂博士EV3測速儀主要由超聲波傳感器和EV3程序塊組成,超聲波傳感器輔助測距和識別障礙[7]。
將超聲波傳感器固定在基板上,并達到一定高度,EV3程序塊固定在基板中;利用連接線將超聲波傳感器與EV3程序塊連接。
軟件方面,利用EST軟件對EV3機器人模塊進行編程、調試,從而實現EV3機器人測量物體運動瞬時速率的實驗。
小車程序(如圖2所示):當程序啟動時,電機運行,小車以功率10 W和50 W直線運動,運轉時間設為3 s,目的是令小車整個車身順利通過測速儀。

圖2 小車運行程序
測速儀程序(如圖3所示):程序啟動時清除屏幕顯示的內容,方便后續實驗顯示數據。實驗開始時,測速儀發出聲音,提醒實驗者實驗已開始,測速儀開始記錄時間,當小車整體車身通過超聲波傳感器時,測速儀再一次發出聲音,提醒實驗者實驗結束,停止記錄時間。程序后續部分,是利用數學公式將測速儀記錄小車通過超聲波傳感器的時間作為除數,車身長度為被除數,用公式計算得出小車通過測速儀的瞬時速率,并將速率顯示在測速儀顯示屏上,方便實驗者讀數并記錄。

圖3 測速儀運行程序
通過樂博士EV3機器人的設計與編程,實現了樂博士EV3機器人測量物體運動瞬時速率的實驗,測量過程可顯示小車車身通過超聲波傳感器的時間,并通過車身除以超聲波傳感器記錄的時間,得出小車運動的瞬時速率。
5 實驗數據
如表1、表2所示,對比兩組數據發現,EV3機器人測量的數據與物理學測量的數據誤差較小,誤差在0.1以內,實驗數據較為準確。
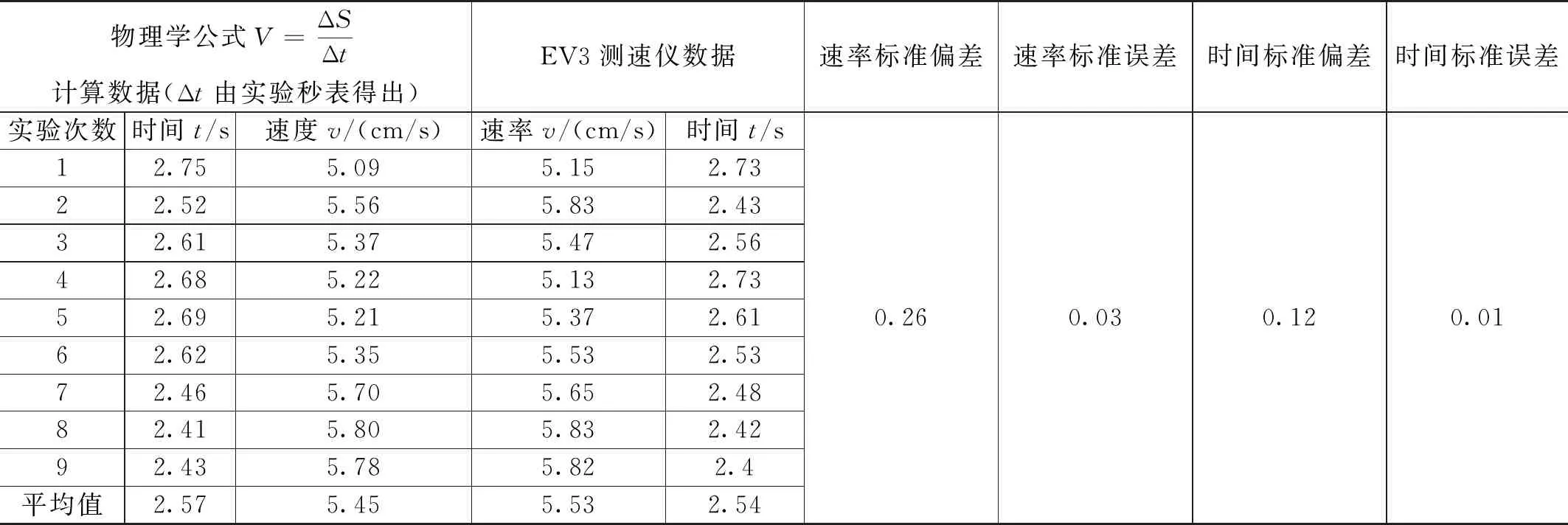
表1 實驗一:測量物體運動瞬時速率實驗數據(功率10 W,小車車身14 cm)

表2 實驗二:測量物體運動瞬時速率實驗數據(功率50 W,小車車身14 cm)
實驗中,小車啟動時的擺放角度、超聲波傳感器的靈敏度以及小車的動力情況都會影響實驗的結果,從而造成實驗誤差。小車啟動時擺放的角度會影響小車前行的路線,當小車行駛的路線出現偏差時,超聲波傳感器測量的距離會小于小車的車身長度14 cm,從而導致超聲波傳感器測量的時間有誤差。
6 結語
本文討論的測速儀拼裝簡單有效,方便自行設計與拼裝,實驗得以有效簡化。測速儀的軟件程序容易理解,通過簡單的講解可以有效理解程序的具體含義,并進行編程設計。
利用樂博士EV3及超聲波傳感器進行物體運動瞬時速率測量,是測量物體運動速度的新實驗方法,豐富了測量物體運動速率實驗的形式。本次實驗也是教育機器人應用于物理實驗教學的創新方法,為數字化實驗提供了思路。
猜你喜歡
小哥白尼(神奇星球)(2020年7期)2021-01-18 05:07:16
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
娃娃樂園·綜合智能(2019年7期)2019-08-26 09:38:48
人大建設(2019年12期)2019-05-21 02:55:44
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
小學生導刊(低年級)(2016年8期)2016-09-24 07:43:42
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21