一種基于虛擬矢量的T型三電平并網(wǎng)逆變器改進型模型預(yù)測控制策略
2022-11-23 05:50:10周揚忠
電氣技術(shù) 2022年11期
陳 隆 周揚忠
一種基于虛擬矢量的T型三電平并網(wǎng)逆變器改進型模型預(yù)測控制策略
陳 隆 周揚忠
(福建省新能源發(fā)電與電能變換重點實驗室(福州大學(xué)),福州 350116)
T型三電平并網(wǎng)逆變器直流側(cè)電容中性點電壓(NP-V)的漂移直接影響并網(wǎng)性能;逆變器并網(wǎng)系統(tǒng)參數(shù)的時變及未建模直接影響傳統(tǒng)模型預(yù)測控制(MPC)精度。為此,本文通過構(gòu)造不影響NP-V的虛擬中矢量、虛擬補充矢量參與MPC控制矢量集,以克服傳統(tǒng)MPC在調(diào)制比較高時NP-V不平衡的缺點;建立電流跟蹤單目標(biāo)代價函數(shù),無需整定權(quán)重因子;根據(jù)直流母線電容狀態(tài)優(yōu)選小矢量,進一步控制NP-V平衡;提出一種擴張狀態(tài)觀測器(ESO)觀測逆變器并網(wǎng)系統(tǒng)未建模部分,并把觀測結(jié)果補償?shù)讲⒕W(wǎng)參考電壓上。實驗結(jié)果表明,優(yōu)化MPC策略消除了NP-V低頻振蕩,其逆變器輸出電流總諧波畸變率(THD)低于傳統(tǒng)MPC策略。
T型三電平并網(wǎng)逆變器;模型預(yù)測控制(MPC);虛擬中矢量;擴張狀態(tài)觀測器(ESO)
0 引言
T型三電平逆變器具有電流通路器件數(shù)量少、導(dǎo)通損耗小、不需要鉗位二極管等優(yōu)點,被廣泛應(yīng)用于可再生能源系統(tǒng)和電機驅(qū)動[1-4]。盡管T型三電平逆變器具有很多優(yōu)勢,但是如果中性點電壓(neutral-point voltage, NP-V)沒有得到有效控制,將直接導(dǎo)致逆變器工作性能降低。
模型預(yù)測控制(model predictive control, MPC)與傳統(tǒng)的線性控制方法不同,可以解耦相互依賴的控制回路,從而提高系統(tǒng)的動態(tài)響應(yīng)。MPC在T型三電平并網(wǎng)逆變器的應(yīng)用中,通常需要設(shè)計雙目標(biāo)代價函數(shù),其中一項用于調(diào)節(jié)NP-V波動,另外一項用于實現(xiàn)電流跟蹤[5-6]。由于代價函數(shù)中權(quán)重因子的值直接影響MPC對逆變器的控制性能,所以需要對權(quán)重因子進行精確調(diào)節(jié),導(dǎo)致費時且困難。文獻[7]提出離散空間向量與MPC結(jié)合的方案,該算法無需查找表即可計算出參考電壓矢量,但是需要設(shè)計一個代價函數(shù)來平衡直流母線電容電壓。此外,傳統(tǒng)MPC策略是建立在精確被控對象數(shù)學(xué)模型的基礎(chǔ)上,但在大多數(shù)情況下,被控對象的部分數(shù)學(xué)模型是未知的或不準(zhǔn)確的,從而降低了MPC的控制效果[8]。文獻[9-10]通過線性外推和基于雅克比迭代的電感在線辨識方案,提高預(yù)測模型的精度。
本文針對T型三電平逆變器提出一種基于虛擬矢量的改進型模型預(yù)測控制策略。該控制策略不僅可以簡化代價函數(shù)設(shè)計,還可以提高并網(wǎng)逆變器系統(tǒng)性能。
1 T型三電平并網(wǎng)逆變器模型預(yù)測控制原理
1.1 T型三電平并網(wǎng)逆變器數(shù)學(xué)模型
圖1為T型三電平并網(wǎng)逆變器系統(tǒng)的結(jié)構(gòu),該系統(tǒng)由直流電源dc供電,功率模塊后端經(jīng)LCL濾波器后并入電網(wǎng)。其中功率模塊包含有母線電容1、2及12個功率開關(guān)管,定義功率開關(guān)管開關(guān)信號為

逆變器每一相通過不同的開關(guān)組合可以產(chǎn)生三種輸出狀態(tài),即1、0、-1,用S表示;三相共計33=27種電壓矢量,其幅值和空間位置如圖2所示。假設(shè)直流側(cè)電容中點電壓平衡,即c1=c2;逆變器輸出相電壓為un(=a, b, c),開關(guān)狀態(tài)與輸出相電壓關(guān)系見表1。
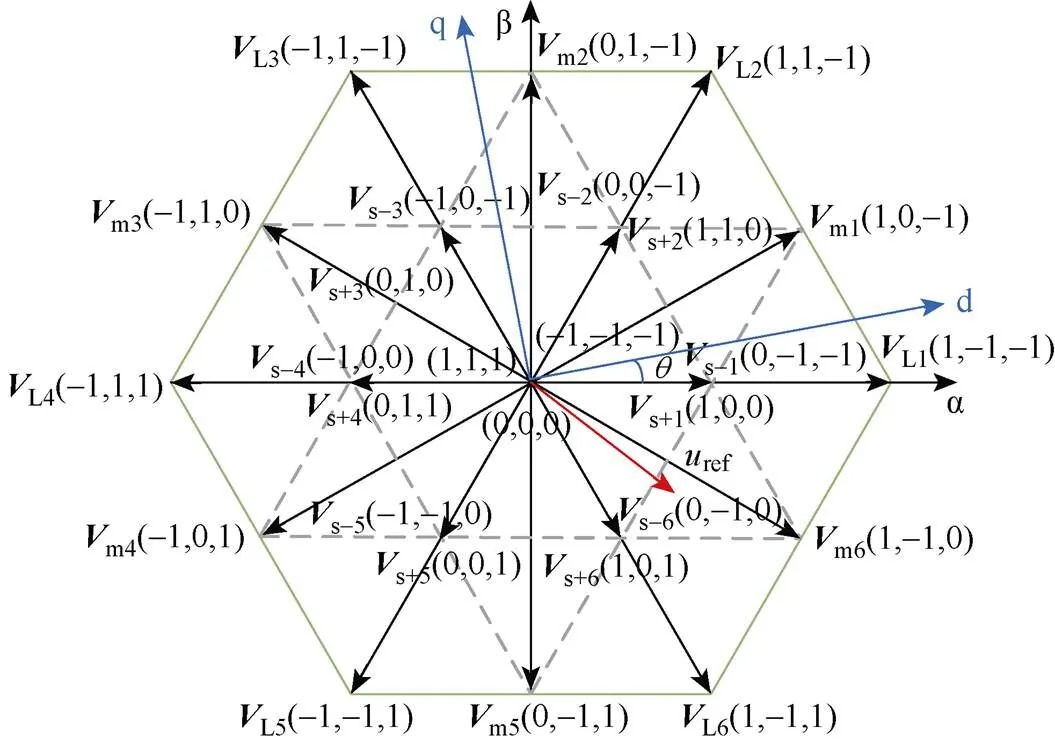
圖2 T型三電平逆變器輸出電壓空間矢量圖
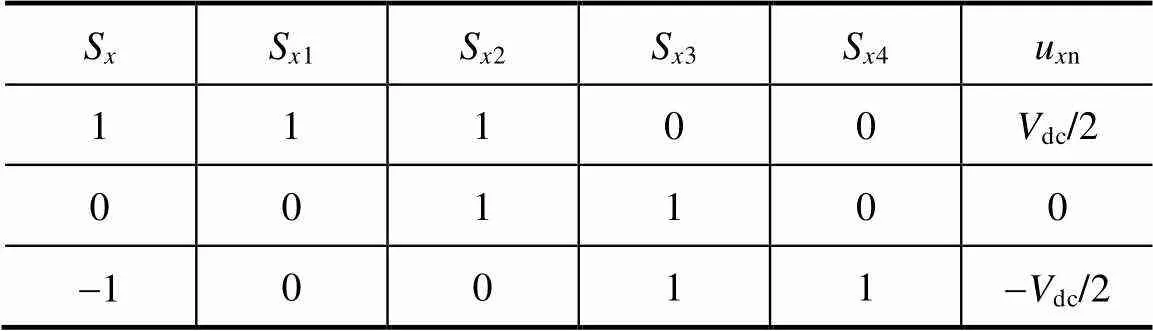
表1 開關(guān)狀態(tài)與輸出相電壓關(guān)系
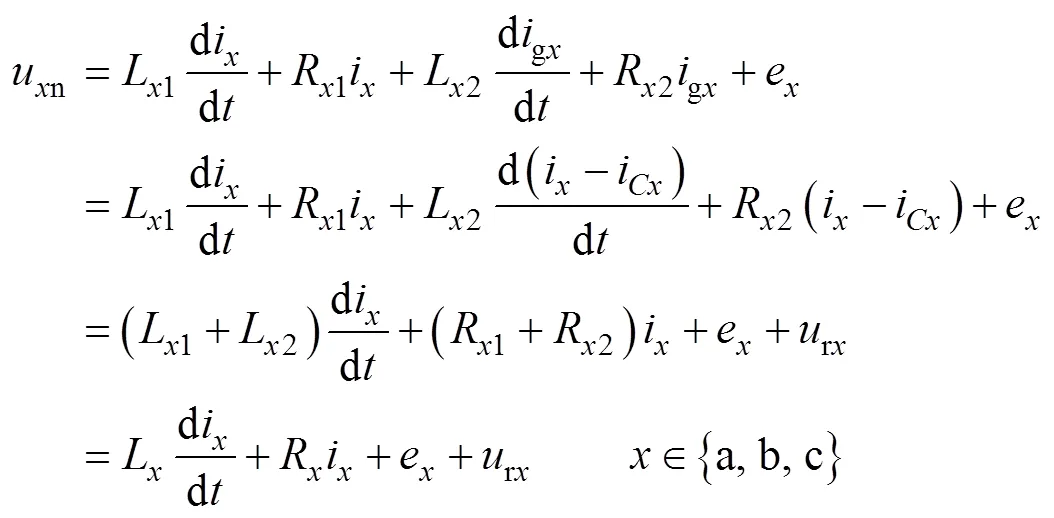
根據(jù)圖1中的電流參考方向,在靜止坐標(biāo)系下建立逆變器的動態(tài)模型為
建立直流側(cè)電容動態(tài)模型,有1=2,當(dāng)直流源電壓恒定時,電容電流表達式為

由圖1結(jié)合表1可知,T型三電平并網(wǎng)逆變器的直流側(cè)電容中點電流o為
(5)
將式(4)和式(5)合并得

1.2 傳統(tǒng)模型預(yù)測控制策略
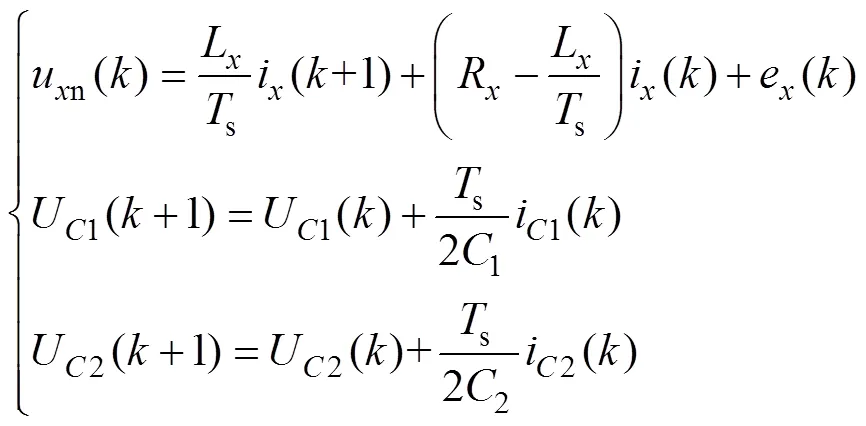
傳統(tǒng)的模型預(yù)測控制是將圖2中的27種矢量依次代入逆變器離散數(shù)學(xué)模型中,通過代價函數(shù)進行評估選擇最優(yōu)的開關(guān)狀態(tài)用于下一次迭代。因為采樣周期s足夠短,可以使用前向歐拉法,將式(3)和式(4)離散化后得到逆變器離散數(shù)學(xué)模型,即


MPC無需復(fù)雜的坐標(biāo)系變換,選擇使設(shè)計代價函數(shù)最小的開關(guān)狀態(tài)用于下一時刻控制迭代。本文在三相靜止坐標(biāo)系下,以電壓為約束條件為例,建立代價函數(shù)為

2 基于虛擬矢量的T型三電平并網(wǎng)逆變器模型預(yù)測控制方法
2.1 考慮中點電壓平衡的電壓矢量集構(gòu)建
如果在一個控制周期內(nèi),直流側(cè)電容中點電流o的平均值不為零,會造成上下電容充放電不平衡,引起中點電壓振蕩甚至漂移。假設(shè)系統(tǒng)三相無中線,則任何時刻滿足a+b+c=0,根據(jù)式(5)可篩選出直流側(cè)電容中點電流值o≠0的矢量是正小矢量、負小矢量和中矢量。若逆變器輸出電流與輸出電壓保持同相,歸納這些矢量對母線電容電壓狀態(tài)的影響效果見表2。
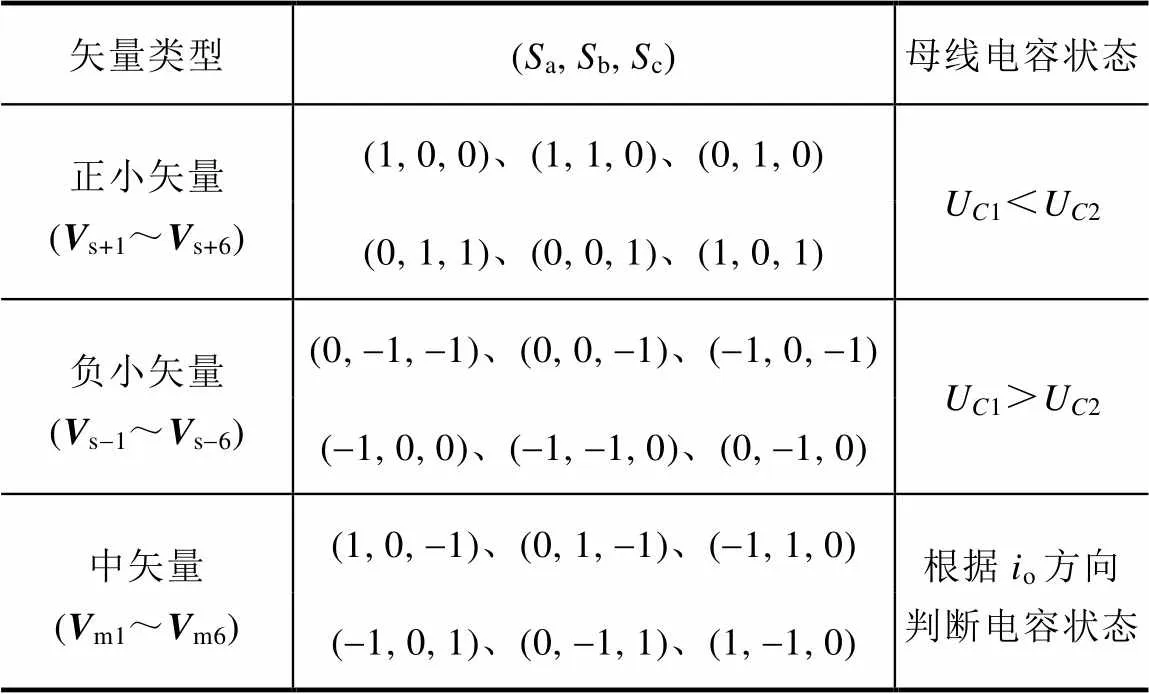
表2 中小矢量開關(guān)狀態(tài)與母線電容狀態(tài)
在調(diào)制系數(shù)較高和低負載功率因數(shù)的工況下,小矢量的作用時間比例小,動用小矢量不足以補償中矢量帶來的中點偏移量。為了克服這一問題,本文構(gòu)造虛擬矢量進一步解決NP-V不平衡問題。


1)虛擬中矢量合成
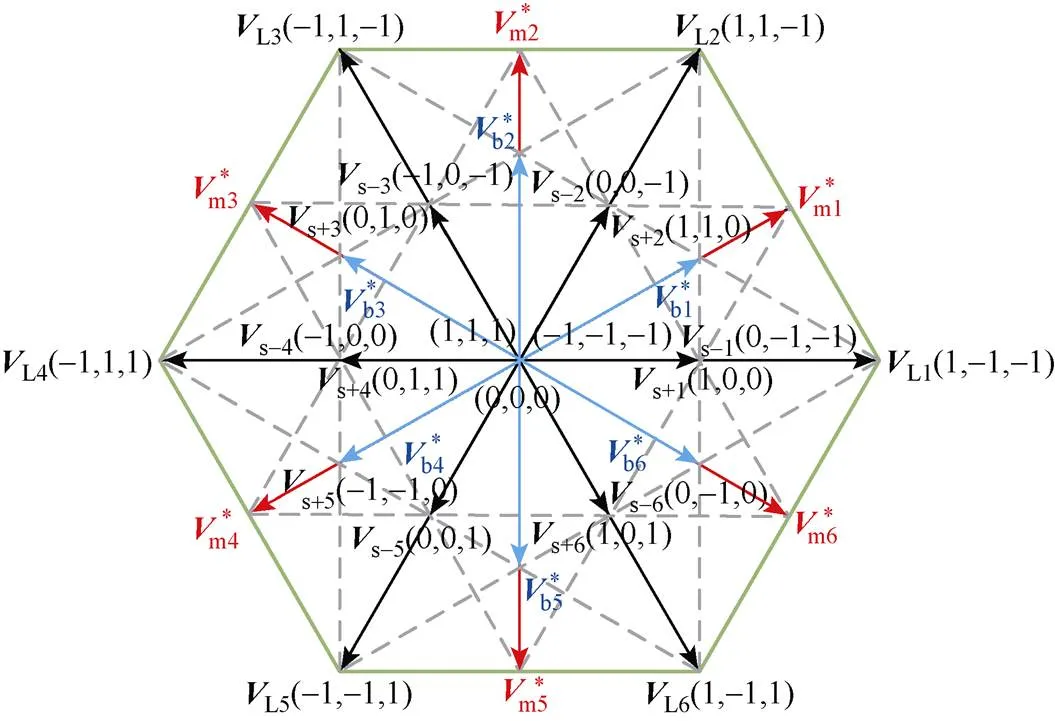
圖3 包含虛擬矢量的T型三電平空間矢量圖

2)虛擬補充矢量合成

表3總結(jié)了虛擬中矢量和虛擬補充矢量的拓展?fàn)顟B(tài)。圖3為所有參與本文MPC的電壓矢量,共有33個空間矢量。將正負小矢量代入式(3)并結(jié)合表2可知,對應(yīng)的正負小矢量產(chǎn)生的相電壓是相同的,但對母線電容作用效果是相反的。因此,本文只需要27次尋優(yōu),即分別把零矢量、正小矢量、虛擬補充矢量、虛擬中矢量和長矢量代入式(8)中;再根據(jù)時刻母線電容狀態(tài),選用合適小矢量。從而實現(xiàn)單代價函數(shù)下的T型三電平逆變器控制,其代價函數(shù)更新為
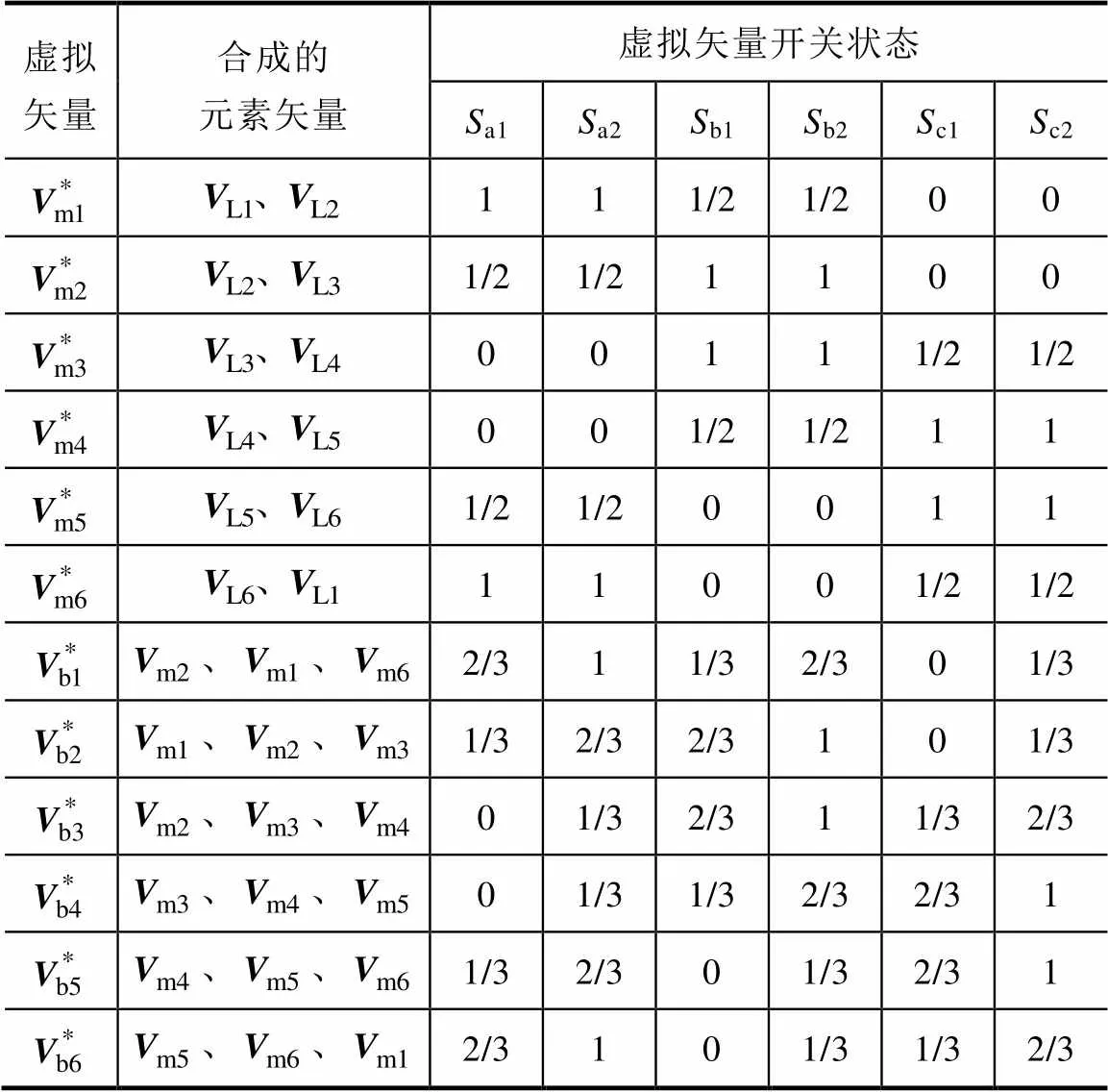
表3 虛擬矢量與其拓展?fàn)顟B(tài)

2.2 模型誤差補償策略
1)考慮模型誤差的逆變器動態(tài)運動模型
上述MPC采用模型本質(zhì)是忽略式(2)中模型擾動項rx,從而產(chǎn)生控制誤差;另外模型中電感等參數(shù)經(jīng)常與實際對象存在偏差,導(dǎo)致MPC性能降低。如何補償上述模型誤差對提高MPC性能非常 重要。

可以看出,逆變器電流環(huán)路為一階非線性系統(tǒng)。令參數(shù)不匹配產(chǎn)生的電壓誤差為內(nèi)部未知擾動f(i)(-rxDLdi/dDRi),網(wǎng)側(cè)電壓為外部已知擾動w()-e控制增益b=1/L,則

以網(wǎng)側(cè)參考電壓為系統(tǒng)輸入us,i為系統(tǒng)輸出y,i為狀態(tài)變量x1,構(gòu)建一階系統(tǒng)為

令廣義擾動x2=a(x1)=bf(i)+bw(),構(gòu)建新系統(tǒng)為
2)建立逆變器中的擴張狀態(tài)觀測器
擴張狀態(tài)觀測器(extended state observer, ESO)能夠根據(jù)系統(tǒng)輸入量refxn與輸出量i對狀態(tài)變量x1、x2進行估計,進而實現(xiàn)動態(tài)擾動前饋補償,針對式(17)建立ESO為
式中:z1、z2分別為x1和x2的估計;1、2決定了ESO誤差跟蹤狀態(tài),當(dāng)且僅當(dāng)2>0時,誤差是逐漸穩(wěn)定的。針對上述ESO,寫出其特征多項式為

定義特征向量值為ESO的帶寬,則有
可以確定ESO的可調(diào)系數(shù)1、2,并簡化參數(shù)整定。帶寬越大,ESO的極點離虛軸距離越遠,對誤差的跟蹤速率也就越快。然而帶寬過大,ESO對采樣噪聲越敏感,導(dǎo)致觀測器出現(xiàn)振蕩。

得到ESO補償后的更新代價函數(shù)為
2.3 優(yōu)化模型預(yù)測控制策略控制框圖
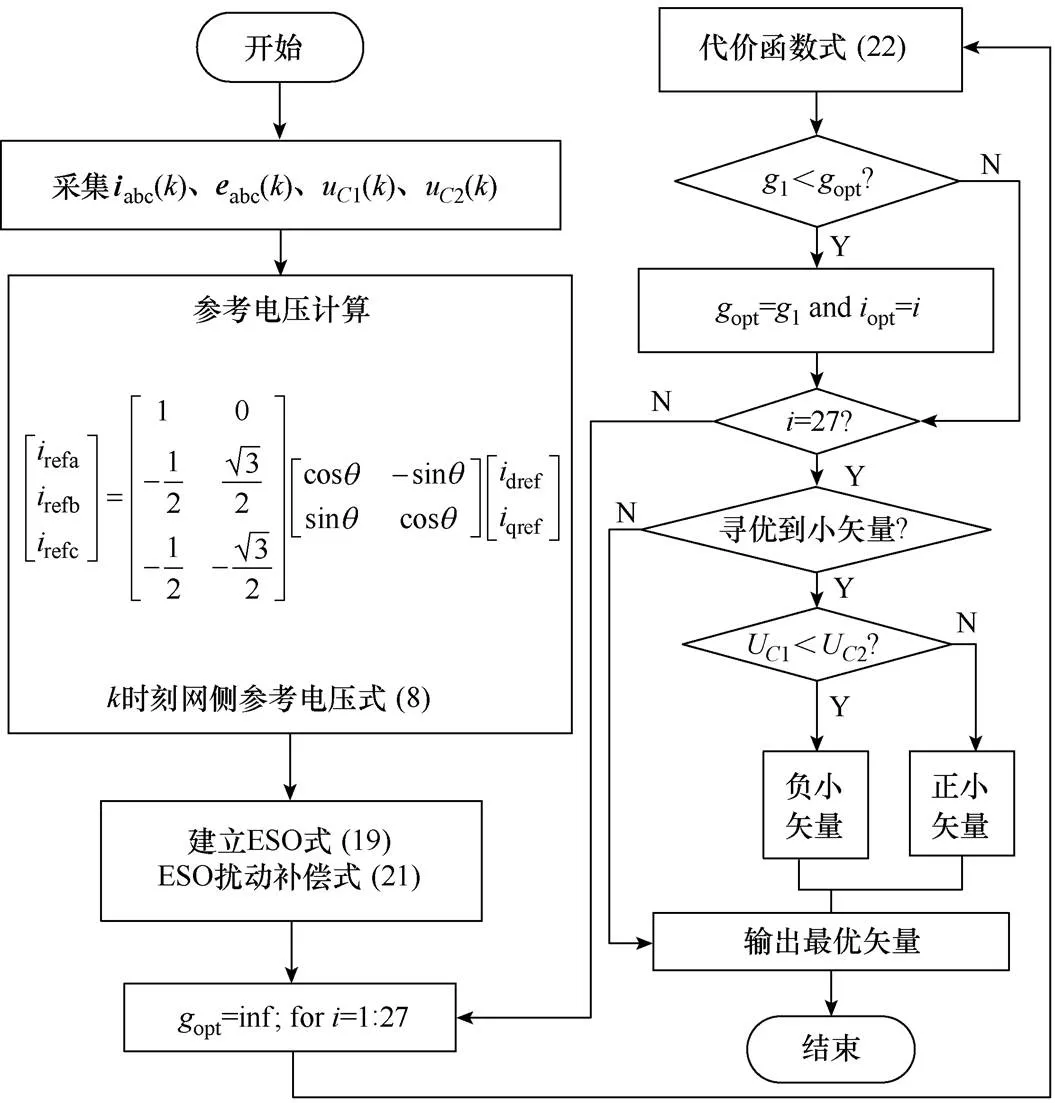
圖4 改進型模型預(yù)測控制策略控制框圖
3 實驗
3.1 實驗樣機
結(jié)合上述理論分析,搭建T型三電平逆變器實驗平臺如圖5所示,對所提控制策略進行實驗驗證。圖5中共有三個功率模塊,構(gòu)成三相輸出,每個功率模塊由4個IKW15T120IGBT功率單管組成。電壓電流采樣信號由霍爾CC6920和精密型電壓互感器zmpt107—1接入調(diào)理電路實時采集,采集模擬信號進入主控芯片TMS320F28377D進行運算后,輸出功率管驅(qū)動信號,進而對功率模塊進行控制。實驗中逆變器系統(tǒng)參數(shù)見表4。
3.2 穩(wěn)態(tài)對比實驗
分析比較不同控制策略的逆變器穩(wěn)態(tài)下的輸出性能、NP-V的控制能力。分別對傳統(tǒng)MPC、優(yōu)化MPC進行實驗分析。給定的三相參考電流峰值為8A。實驗結(jié)果如圖6所示。從圖6(a)和圖6(b)可見,優(yōu)化MPC逆變器輸出電流總諧波畸變率(total harmonic distortion, THD)更低;從圖6(c)可見,優(yōu)化MPC的NP-V波動小,NP-V電位差僅在±0.4V波動。
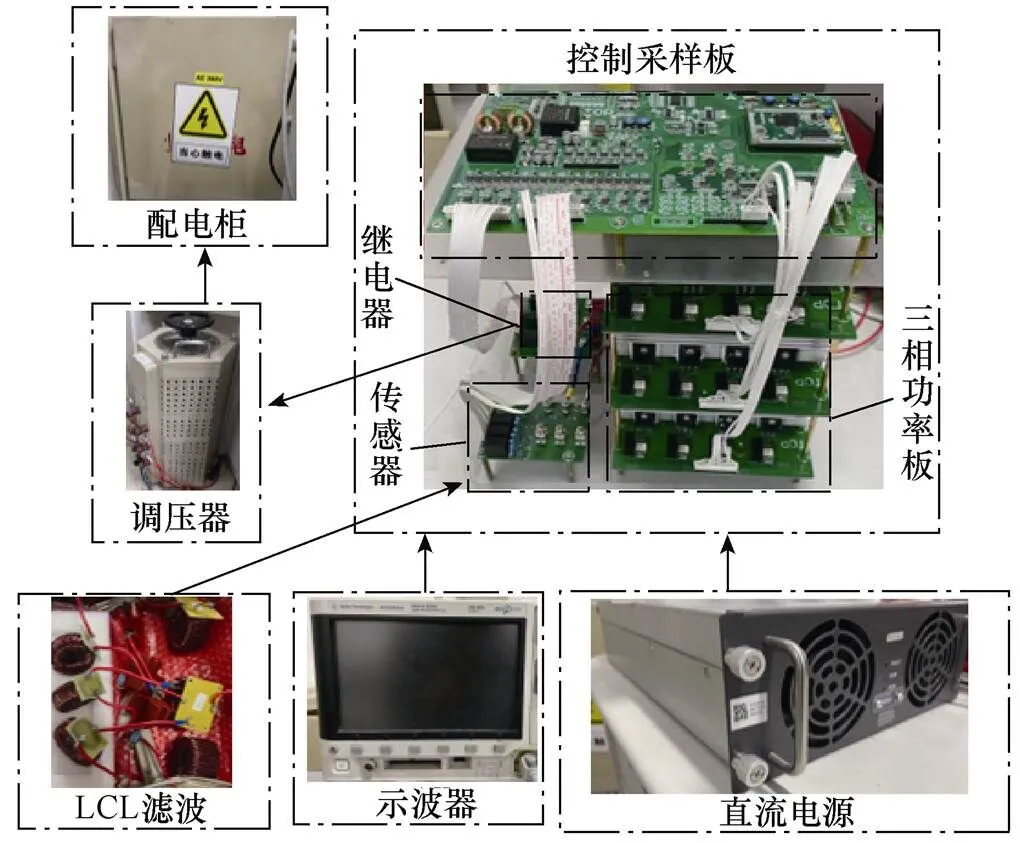
圖5 T型三電平逆變器實驗平臺

表4 系統(tǒng)參數(shù)
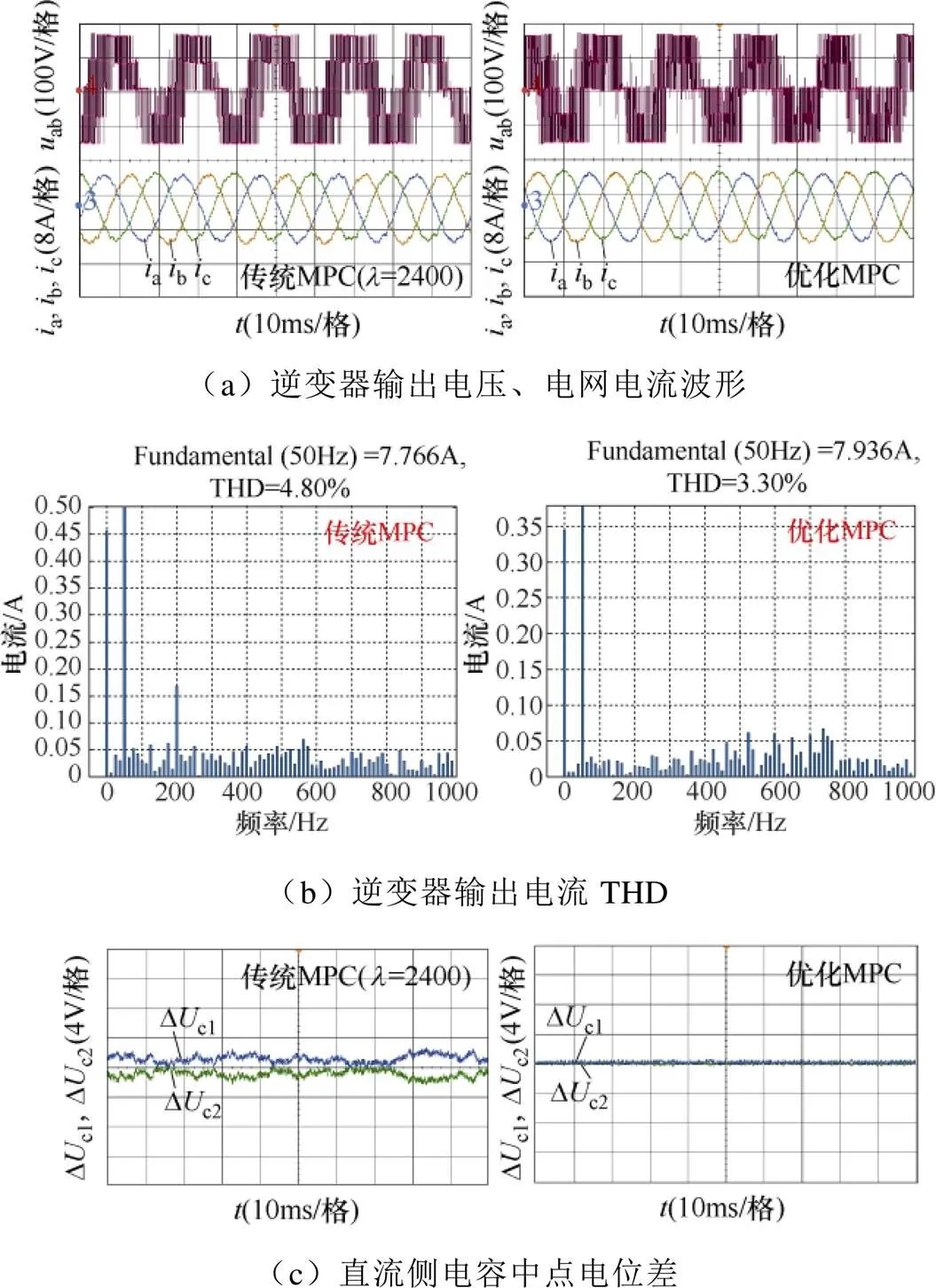
圖6 不同控制策略的逆變器性能比較實驗結(jié)果
3.3 動態(tài)實驗
圖7為不同策略下的電流階躍實驗結(jié)果。指令電流幅值由4A躍升到8A時,實際電流能在1ms內(nèi)到達指令值并保證系統(tǒng)穩(wěn)定性,證明了優(yōu)化MPC依然保留著傳統(tǒng)MPC優(yōu)秀的動態(tài)響應(yīng)性能。
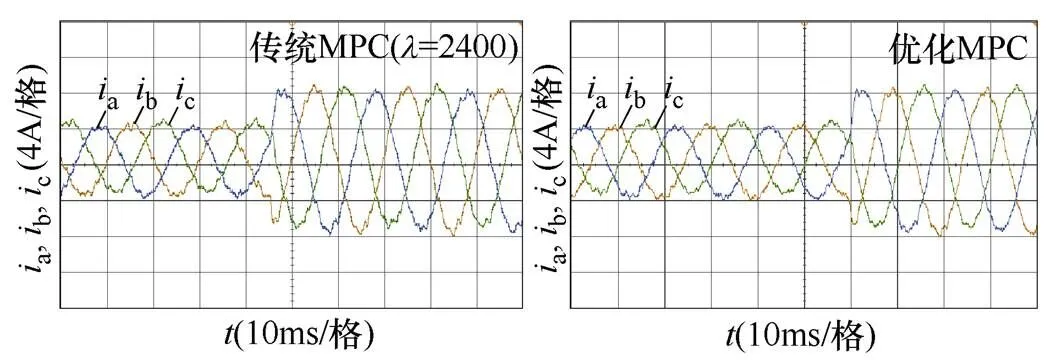
圖7 不同控制策略的逆變器輸出電流階躍實驗結(jié)果
3.4 電感失配下的ESO補償實驗
分別在基于虛擬矢量單代價函數(shù)無ESO補償?shù)腗PC策略和優(yōu)化MPC策略下進行電感不適配實驗。其中,電感靜態(tài)值為6.2mH,分別設(shè)置模型電感值為7.5mH、6.2mH、5mH。不同控制策略的電感失配的電網(wǎng)電流THD如圖8所示,由圖8可知,因模型電感值不匹配,提高了電網(wǎng)電流諧波分量;通過ESO觀測補償,有效解決了MPC因控制模型精度而造成的控制誤差。
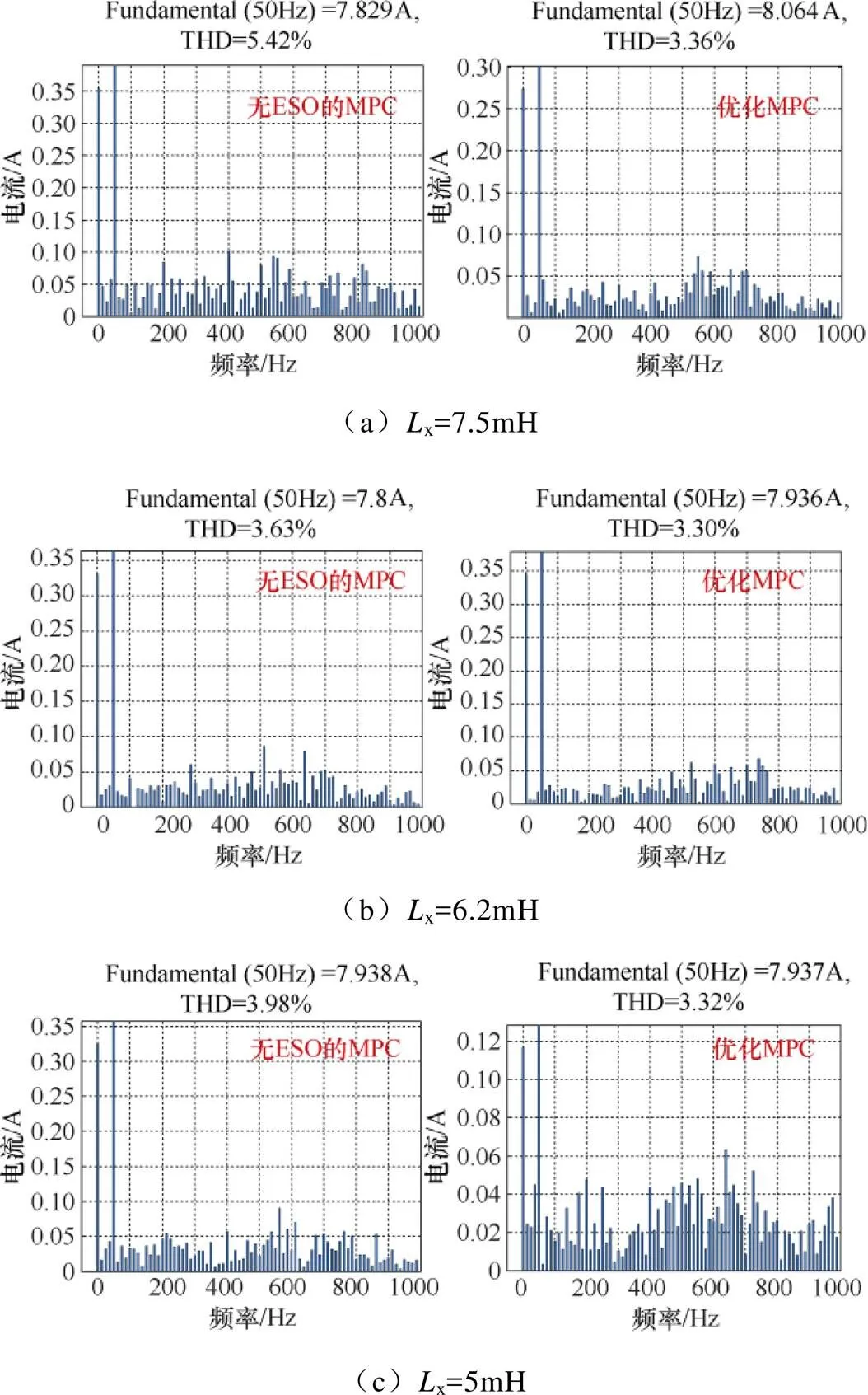
圖8 不同控制策略的電感失配的電網(wǎng)電流THD
4 結(jié)論
本文以T型三電平并網(wǎng)逆變器為研究對象,提出了一種基于虛擬矢量的優(yōu)化模型預(yù)測控制策略。通過穩(wěn)態(tài)實驗和動態(tài)實驗驗證了基于虛擬矢量的MPC策略在并網(wǎng)性能和平衡直流側(cè)中性點電壓能力方面的提高,并通過電感失配實驗證明了ESO補償策略的有效性。
[1] 張建忠, 胡路才, 徐帥. 一種零序電壓注入的T型三電平逆變器中點電位平衡控制方法[J]. 電工技術(shù)學(xué)報, 2020, 35(4): 807-816.
[2] 李倩倩, 夏蓉花, 劉戰(zhàn), 等. 有源中點鉗位型三電平并網(wǎng)逆變器多目標(biāo)優(yōu)化預(yù)測控制[J]. 電氣技術(shù), 2021, 22(7): 13-18.
[3] WANG Xueqing, WANG Zheng, YAN Chunxing, et al. Fault-tolerant control of common electrical faults in dual three-phase PMSM drives fed by T-type three- level inverters[J]. IEEE Transactions on Industry Applications, 2021, 57(1): 481-491.
[4] XU Shuai, SUN Zhenyao, YAO Chunxing, et al. Model predictive control with constant switching frequency for three-level T-type inverter-fed PMSM drives[J]. IEEE Transactions on Industrial Electronics, 2022, 69(9): 8839-8850.
[5] XIA Zhenglong, LIU Zhan, GUERRERO J M. Multi- objective optimal model predictive control for three- level ANPC grid-connected inverter[J]. IEEE Access, 2020, 8: 59590-59598.
[6] 楊勇, 謝門喜, 樊明迪. T型三電平單相逆變器有限開關(guān)狀態(tài)模型預(yù)測控制方法[J]. 電機與控制學(xué)報, 2019, 23(3): 120-126.
[7] YANG Yong, WEN Huiqing, FAN Mingdi, et al. Fast finite switching state model predictive control method without weighting factors for T-type three-level three- phase inverters[J]. IEEE Transactions on Industrial Informatics, 2019, 15(3): 1298-1310.
[8] 辛業(yè)春, 王延旭, 李國慶, 等. T型三電平并網(wǎng)逆變器有限集模型預(yù)測控制快速尋優(yōu)方法[J]. 電工技術(shù)學(xué)報, 2021, 36(8): 1681-1692.
[9] 唐圣學(xué), 邢路銘, 黎霞, 等. 逆變器有限集模型預(yù)測控制參數(shù)不匹配補償方法研究[J]. 電機與控制學(xué)報, 2021, 25(11): 46-55.
[10] 李偉, 張勇軍, 肖雄. 實時電感辨識的模型預(yù)測并網(wǎng)逆變器控制方法[J]. 電工技術(shù)學(xué)報, 2018, 33(15): 3450-3460.
An improved model predictive control based on virtual space vector for T-type three-level grid-connected inverters
CHEN Long ZHOU Yangzhong
(Fujian Key Laboratory of New Energy Generation and Power Conversion (Fuzhou University), Fuzhou 350116)
The drift of the neutral-point voltage (NP-V) at the DC-side capacitor of the T-type three-level grid-connected inverter directly affects the grid-connected performance. The model predictive control (MPC) accuracy is directly affected by the time variation and non-modeling of grid-connected inverter system parameters. In order to overcome the defect of NP-V imbalance in traditional MPC when the modulation is relatively high, a virtual neutral vector and a virtual compensation vector are constructed to participate in the control vector set of MPC without affecting NP-V in this paper. The single objective cost function of current tracking is established, and the small vector is optimized according to the DC bus capacitance state without setting the weight factor to further control the NP-V balance. An extended state observer (ESO) is proposed to observe the non-modeling part of the grid-connected inverter system and add the observation results to the grid-connected reference voltage. The experimental results show that the optimal MPC strategy eliminates NP-V low-frequency oscillations, and its total harmonic distortion (THD) is lower than that of the traditional MPC strategy.
T-type three-level grid-connected inverters; model predictive control (MPC); virtual middle space vector; extended state observer (ESO)
2022-06-08
2022-06-27
陳 隆(1996—),男,福建省福州市人,碩士研究生,主要從事新能源發(fā)電系統(tǒng)的研究工作。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
能源工程(2020年6期)2021-01-26 00:55:22
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52