
LabVIEW一階系統(tǒng)虛擬教學(xué)實(shí)驗(yàn)系統(tǒng)開發(fā)
2022-11-27 10:35:32鹿堯
機(jī)電工程技術(shù) 2022年10期
關(guān)鍵詞:系統(tǒng)
鹿 堯
(南京理工大學(xué)機(jī)械工程學(xué)院,南京 210094)
0 引言
隨著虛擬儀技術(shù)的發(fā)展,基于虛擬儀器的虛擬教學(xué)系統(tǒng)的開發(fā)也隨之得到社會(huì)的關(guān)注。虛擬儀器是通過一些軟件平臺(tái)可以把電腦與一些程序模塊整合,操作者可以通過這些軟件平臺(tái)和程序模塊自主定義、設(shè)計(jì)虛擬實(shí)驗(yàn)[1]。虛擬儀器之所以會(huì)發(fā)展如此迅速,與傳統(tǒng)儀器提供了強(qiáng)大的理論支持和操作基礎(chǔ)密不可分。表1所示為兩者之間的比較。
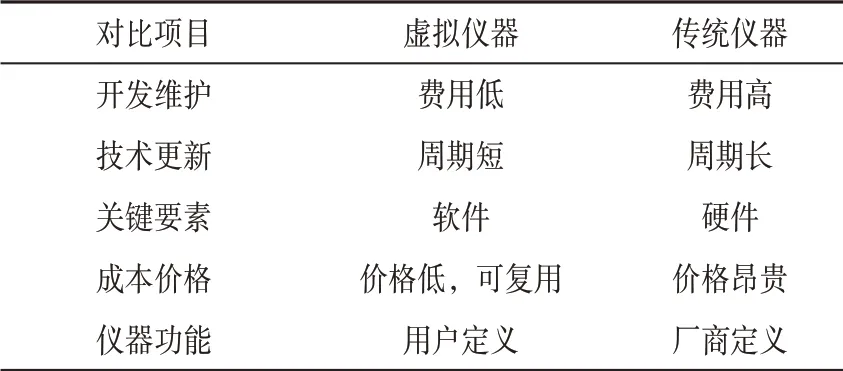
表1 兩種儀器的對(duì)比
下面舉出幾個(gè)國(guó)外的虛擬儀器的例子:如美國(guó)國(guó)防部高級(jí)研究與發(fā)展計(jì)劃聯(lián)合開發(fā)了虛擬仿真互聯(lián)網(wǎng)平臺(tái)系統(tǒng)VINT[2];由美國(guó)俄勒岡大學(xué)物理系主辦的物理實(shí)驗(yàn)網(wǎng)站VLAB[3];美國(guó)巴爾的摩一個(gè)基于Java技術(shù)的虛擬物理實(shí)驗(yàn)室項(xiàng)目[4];德國(guó)魯爾大學(xué)開發(fā)的VClab實(shí)驗(yàn)室[5];由新加坡國(guó)立大學(xué)電子工程系開發(fā)的工程教育虛擬實(shí)驗(yàn)室[6]。
盡管中國(guó)對(duì)虛擬儀器的研究起步較晚,但是這些年里也是有所發(fā)展。如中國(guó)科技大學(xué)研制出了幾何光學(xué)設(shè)計(jì)平臺(tái)的物理虛擬實(shí)驗(yàn)室[7];北京大學(xué)計(jì)算機(jī)系設(shè)計(jì)開發(fā)的流水線實(shí)驗(yàn)和CACHE實(shí)驗(yàn)兩套網(wǎng)絡(luò)虛擬實(shí)驗(yàn)室[8];華中科技大學(xué)開發(fā)了液壓回路性能和液壓元件裝拆虛擬實(shí)驗(yàn)[9];北京師范大學(xué)現(xiàn)代教育技術(shù)研究研制了一個(gè)基于虛擬空間的三維電子線路實(shí)驗(yàn)環(huán)境的Evlab系統(tǒng)[10]。此外,虛擬儀器如口腔實(shí)驗(yàn)教學(xué)[11]、細(xì)胞遺傳學(xué)實(shí)驗(yàn)[12]等醫(yī)學(xué)應(yīng)用方面也有很大的進(jìn)步;并且在管理學(xué)方面也有所發(fā)展,如區(qū)塊鏈+電子商務(wù)虛擬實(shí)驗(yàn)[13]等方面的研究。
本文基于虛擬儀器軟件——LabVIEW對(duì)一階慣性系統(tǒng)進(jìn)行網(wǎng)上虛擬實(shí)驗(yàn)的搭建。一方面完成了一套一階慣性系統(tǒng)的仿真和PID控制實(shí)驗(yàn),有助于緩解現(xiàn)實(shí)中的實(shí)驗(yàn)教學(xué)資源分布不均衡,可以降低實(shí)驗(yàn)室所屬的相關(guān)單位的財(cái)務(wù)開銷,使得使用者對(duì)一階慣性系統(tǒng)和PID控制了解更加簡(jiǎn)單,方便和易懂;另一方面針對(duì)一階慣性系統(tǒng)的PID控制,利用本次搭建的實(shí)驗(yàn)系統(tǒng)中經(jīng)過PID控制后得到的系統(tǒng)時(shí)域響應(yīng)圖,通過更改PID控制中的變量參數(shù),對(duì)比不同變量產(chǎn)生的時(shí)域響應(yīng)圖最終可以得出PID控制中積分單元、微分單元和增益單元對(duì)系統(tǒng)的影響[14-15]。
1 一階系統(tǒng)虛擬教學(xué)實(shí)驗(yàn)的基礎(chǔ)理論
1.1 一階系統(tǒng)概述

則可以得出其幅頻特性為:

對(duì)于一階慣性系統(tǒng)的波德圖的計(jì)算,以式(2)為例,其對(duì)數(shù)幅頻特性為,對(duì)數(shù)相頻特性為φ(w)=-arctanwT。
在LabVIEW上模擬出當(dāng)凈增益K=1,時(shí)間常數(shù)時(shí)的結(jié)果如圖1所示。
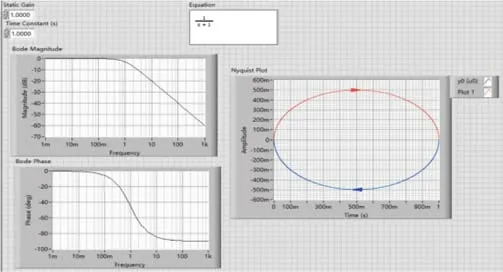
圖1 典型一階慣性系統(tǒng)頻率特性
1.2 一階系統(tǒng)的單位階躍響應(yīng)
當(dāng)階躍信號(hào)作為系統(tǒng)的輸入信號(hào)時(shí),首先階躍信號(hào)其數(shù)學(xué)表達(dá)式可以表示為經(jīng)過拉普拉斯變換之后的拉氏變換式為R(s)=,則上述系統(tǒng)的該時(shí)間響應(yīng)的拉氏變換式為:

再將式(3)經(jīng)過拉普拉斯反變換轉(zhuǎn)化成數(shù)學(xué)表達(dá)式。得到輸出的原函數(shù)為:

用LabVIEW模擬出來的一階慣性系統(tǒng)的單位階躍響應(yīng)前面板如圖2所示。
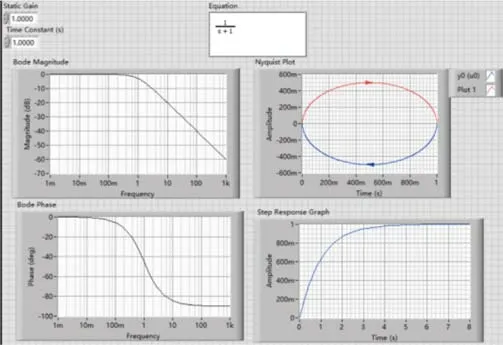
圖2 一階系統(tǒng)單位階躍響應(yīng)
簡(jiǎn)單介紹該曲線的相關(guān)特性。由式(3)可以計(jì)算出時(shí)間響應(yīng)曲線的初始斜率:

式(5)有利于計(jì)算出該一階慣性系統(tǒng)的時(shí)間常數(shù),對(duì)于圖2中的一階慣性系統(tǒng)的時(shí)間常數(shù)即為1。
該一階慣性系統(tǒng)階躍響應(yīng)曲線最終趨于一定值的曲線,并且該系統(tǒng)并不具備振蕩特征。因此該系統(tǒng)的時(shí)間響應(yīng)并沒有超調(diào)量。
最后,也可以直接從圖2看出,當(dāng)t→+∞時(shí),系統(tǒng)的穩(wěn)態(tài)誤差
1.3 一階系統(tǒng)的單位脈沖響應(yīng)
當(dāng)脈沖信號(hào)作為系統(tǒng)的輸入信號(hào)時(shí),首先脈沖信號(hào)其數(shù)學(xué)表達(dá)式可以表示為,經(jīng)過拉普拉斯變換之后的拉氏變換式為R(s)=1,則上述系統(tǒng)的該時(shí)間響應(yīng)的拉氏變換式為:

再將式(6)經(jīng)過拉普拉斯反變換轉(zhuǎn)化成數(shù)學(xué)表達(dá)式。得到輸出的原函數(shù)為:

用LabVIEW模擬出來的一階慣性系統(tǒng)的單位脈沖響應(yīng)前面板如圖3所示。
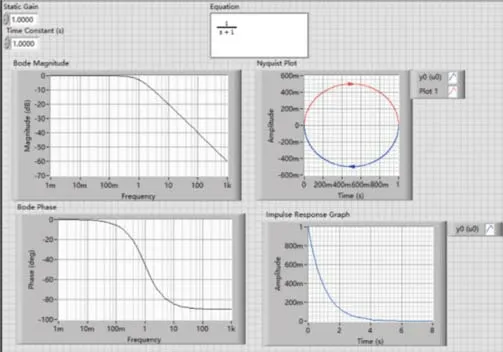
圖3 一階系統(tǒng)單位脈沖響應(yīng)
對(duì)于一階系統(tǒng)的單位脈沖響應(yīng)信號(hào)曲線,當(dāng)時(shí)間t逐漸增加,直至當(dāng)t→+∞時(shí),c(t)=0。因此一階系統(tǒng)的單位脈沖響應(yīng)無穩(wěn)態(tài)分量。計(jì)算該時(shí)間響應(yīng)曲線的初始斜率
2 虛擬教學(xué)實(shí)驗(yàn)設(shè)計(jì)
LabVIEW中有兩種PID控制器的控件,一種是測(cè)量測(cè)試使用的PID控件,另一種就是此次設(shè)計(jì)所需要的控制設(shè)計(jì)與仿真模塊的PID控件。
PID控制也叫比例積分微分控制,它兼具比例微分控制的改善系統(tǒng)動(dòng)態(tài)品質(zhì)和比例積分控制的:

式中:Kp為比例單元增益系數(shù);Ti為積分單元的系數(shù);Td為微分單元的系數(shù)。
在PID控制中各個(gè)單元的作用也有不同,具體如下。
(1)比例單元通俗地說就是一個(gè)起到放大作用的單元,比例單元的系數(shù)越大,放大的倍數(shù)也就越大,但是被控制、被調(diào)節(jié)的參數(shù)的曲線波動(dòng)也越大。系統(tǒng)在比例單元運(yùn)作時(shí)也會(huì)因?yàn)楸壤龁卧糯蟮臅r(shí)候會(huì)產(chǎn)生與實(shí)際被測(cè)參數(shù)產(chǎn)生偏差,這時(shí)候就需要引入積分單元進(jìn)行工作。
(2)積分單元的作用就是當(dāng)系統(tǒng)產(chǎn)生偏差時(shí),積分單元就會(huì)隨著時(shí)間進(jìn)行積累,逐漸抵消這個(gè)偏差,只要偏差一直存在,積分單元將會(huì)一直運(yùn)行。
(3)微分單元的作用就是解決被控對(duì)象的滯后問題。
一階系統(tǒng)PID控制實(shí)驗(yàn)設(shè)計(jì)如下。
對(duì)一階系統(tǒng)先進(jìn)行PID控制再進(jìn)行時(shí)間響應(yīng)。前面內(nèi)容已經(jīng)介紹了一階系統(tǒng)的傳遞函數(shù)而PID控制的傳遞函數(shù)將兩個(gè)傳遞函數(shù)相乘得出整個(gè)系統(tǒng)的傳遞函數(shù)為:
下面通過幾個(gè)示例進(jìn)行對(duì)比,來觀察整個(gè)系統(tǒng)的時(shí)間響應(yīng)有什么區(qū)別。
對(duì)于同一個(gè)一階系統(tǒng),假設(shè)其時(shí)間常數(shù)為1,凈增益也為1,那么這個(gè)一階系統(tǒng)的傳遞函數(shù)就為G(s)=。對(duì)于這樣一個(gè)一階系統(tǒng),每次只改變PID控制中3個(gè)參數(shù)其中一個(gè),再給予這整個(gè)系統(tǒng)一個(gè)相同的時(shí)間響應(yīng),觀察最終的響應(yīng)信號(hào)的時(shí)域圖。
2.1 整個(gè)系統(tǒng)的單位階躍響應(yīng)
先取PID控制環(huán)節(jié)的3個(gè)參數(shù):比例系數(shù)為20,積分系數(shù)為0,微分系數(shù)為0.01,得出PID控制環(huán)節(jié)傳遞函數(shù)為Gc(s)=0.2s+20,那么整個(gè)系統(tǒng)的傳遞函數(shù)即為F(s)=。當(dāng)整個(gè)系統(tǒng)的時(shí)間響應(yīng)為單位階躍響應(yīng),其拉普拉斯變換式為R(s)=1s時(shí),則上述系統(tǒng)的該時(shí)間響應(yīng)的拉氏變換式為C(s)=再將C(s)經(jīng)過拉普拉斯反變換轉(zhuǎn)化成數(shù)學(xué)表達(dá)式。得到輸出的原函數(shù)為:

用LabVIEW對(duì)上面的計(jì)算環(huán)節(jié)進(jìn)行模擬,如圖4所示。
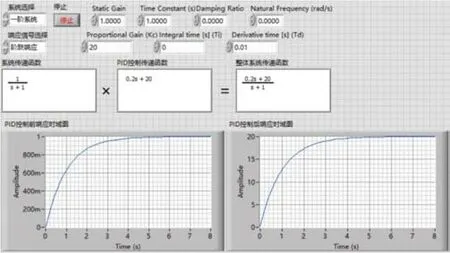
圖4 整體系統(tǒng)的單位階躍響應(yīng)時(shí)域圖
當(dāng)只改變PID控制環(huán)節(jié)中的一個(gè)參數(shù),保持另外兩個(gè)參數(shù)不變?cè)龠M(jìn)行處理。先改變比例系數(shù),不改變微分系數(shù)和積分系數(shù),使比例系數(shù)由20變?yōu)?0。于是PID控制環(huán)節(jié)的傳遞函數(shù)就變?yōu)镚c(s)=0.4s+40,整體系統(tǒng)的傳遞函數(shù)為F(s)=當(dāng)相同的單位階躍響應(yīng)作用在這個(gè)系統(tǒng)上時(shí)可以得出輸出的拉氏變換式為,再對(duì)C(s)經(jīng)過拉普拉斯反變換轉(zhuǎn)化成數(shù)學(xué)表達(dá)式。得到輸出的原函數(shù)為

用LabVIEW對(duì)上面的計(jì)算環(huán)節(jié)進(jìn)行模擬,如圖5所示。
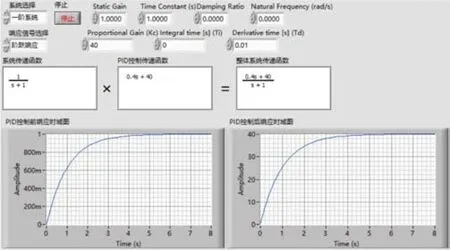
圖5 Kp=40時(shí)整體系統(tǒng)的單位階躍響應(yīng)時(shí)域圖
再保持原來的比例系數(shù)20不變,只改變積分系數(shù),不改變微分系數(shù),把積分系數(shù)由原來的0改為0.1。于是PID控制環(huán)節(jié)的傳遞函數(shù)就變?yōu)椋w系統(tǒng)的傳遞函數(shù)為,當(dāng)相同的單位階躍響應(yīng)作用在這個(gè)系統(tǒng)上時(shí)可以得出輸出的拉氏變換式為C(s)=,再對(duì)C(s)經(jīng)過拉普拉斯反變換轉(zhuǎn)化成數(shù)學(xué)表達(dá)式。得到輸出的原函數(shù)為:

用LabVIEW對(duì)上面的計(jì)算環(huán)節(jié)進(jìn)行模擬,如圖6所示,發(fā)現(xiàn)該時(shí)域圖發(fā)散。
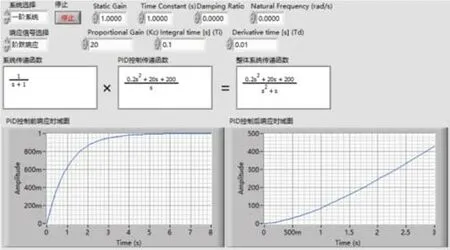
圖6 Ti=0.1時(shí)整體系統(tǒng)的單位階躍響應(yīng)時(shí)域圖
再保持原來的比例系數(shù)和積分系數(shù)不變,只改變微分系數(shù),使微分系數(shù)由0.01變?yōu)?.2。于是PID控制環(huán)節(jié)的傳遞函數(shù)就變?yōu)镚c(s)=4s+20,整體系統(tǒng)的傳遞函數(shù)為F(s)=,當(dāng)相同的單位階躍響應(yīng)作用在這個(gè)系統(tǒng)上時(shí)可以得出輸出的拉氏變換式為再對(duì)C(s)經(jīng)過拉普拉斯反變換轉(zhuǎn)化成數(shù)學(xué)表達(dá)式。得到輸出的原函數(shù)為:

用LabVIEW對(duì)上面的計(jì)算環(huán)節(jié)進(jìn)行模擬,如圖7所示。
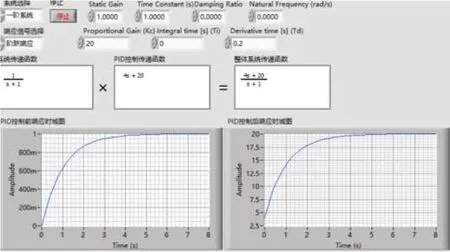
圖7 Td=0.2時(shí)整體系統(tǒng)的單位階躍響應(yīng)時(shí)域圖
2.2 整個(gè)系統(tǒng)的單位脈沖響應(yīng)
對(duì)于相同的PID控制環(huán)節(jié),其傳遞函數(shù)為Gc(s)=那么整個(gè)系統(tǒng)的傳遞函數(shù)即為F(s)=當(dāng)整個(gè)系統(tǒng)的時(shí)間響應(yīng)為單位脈沖響應(yīng),其拉普拉斯變換式為R()s=1時(shí),可以得出整個(gè)系統(tǒng)的輸出的拉氏變換式為再對(duì)C(s)經(jīng)過拉普拉斯反變換轉(zhuǎn)化成數(shù)學(xué)表達(dá)式。得到輸出的原函數(shù)為:

用LabVIEW對(duì)上面的計(jì)算環(huán)節(jié)進(jìn)行模擬,如圖8所示。
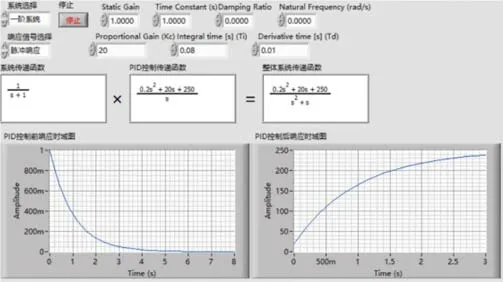
圖8 整體系統(tǒng)的單位脈沖響應(yīng)時(shí)域圖
當(dāng)只改變PID控制環(huán)節(jié)中的一個(gè)參數(shù),保持另外兩個(gè)參數(shù)不變?cè)龠M(jìn)行處理。先改變比例系數(shù),不改變微分系數(shù)和積分系數(shù),使比例系數(shù)由20變?yōu)?0。于是PID控制環(huán)節(jié)的傳遞函數(shù)就變?yōu)檎w系統(tǒng)的傳遞函數(shù)為,當(dāng)相同的單位脈沖響應(yīng)作用在這個(gè)系統(tǒng)上時(shí)可以得出輸出的拉氏變換式為C(s)=,再對(duì)C(s)經(jīng)過拉普拉斯反變換轉(zhuǎn)化成數(shù)學(xué)表達(dá)式。得到輸出的原函數(shù)為:

用LabVIEW對(duì)上面的計(jì)算環(huán)節(jié)進(jìn)行模擬,如圖9所示。
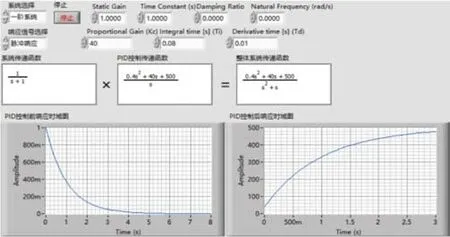
圖9 Kp=40時(shí)整體系統(tǒng)的單位脈沖響應(yīng)時(shí)域圖
再保持原來的比例系數(shù)20不變,只改變積分系數(shù),不改變微分系數(shù),把積分系數(shù)由原來的0.08改為0.16。于是PID控制環(huán)節(jié)的傳遞函數(shù)就變?yōu)檎w系統(tǒng)的傳遞函數(shù)為,當(dāng)相同的單位脈沖響應(yīng)作用在這個(gè)系統(tǒng)上時(shí)可以得出輸出的拉氏變換式為C(s)=,再對(duì)C(s)經(jīng)過拉普拉斯反變換轉(zhuǎn)化成數(shù)學(xué)表達(dá)式。得到輸出的原函數(shù)為:

用LabVIEW對(duì)上面的計(jì)算環(huán)節(jié)進(jìn)行模擬,如圖10所示。
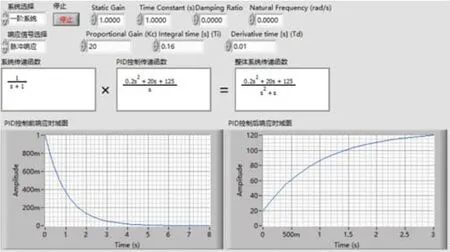
圖10 Ti=0.16時(shí)整體系統(tǒng)的單位脈沖響應(yīng)時(shí)域圖
再保持原來的比例系數(shù)和積分系數(shù)不變,只改變微分系數(shù),使微分系數(shù)由0.01變?yōu)?.2。于是PID控制環(huán)節(jié)的傳遞函數(shù)就變?yōu)椋w系統(tǒng)的傳遞函數(shù)為,當(dāng)相同的單位脈沖響應(yīng)作用在這個(gè)系統(tǒng)上時(shí)可以得出輸出的拉氏變換式為再對(duì)C(s)經(jīng)過拉普拉斯反變換轉(zhuǎn)化成數(shù)學(xué)表達(dá)式。得到輸出的原函數(shù)為:

用LabVIEW對(duì)上面的計(jì)算環(huán)節(jié)進(jìn)行模擬,如圖11所示。
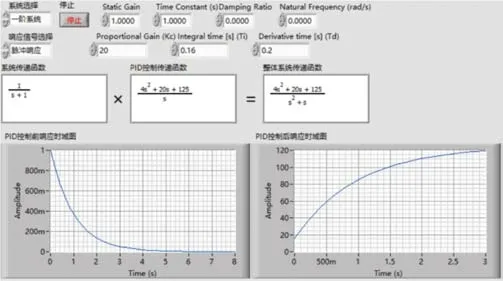
圖11 Td=0.2時(shí)整體系統(tǒng)的單位脈沖響應(yīng)時(shí)域圖
3 結(jié)束語
本文利用LabVIEW設(shè)計(jì)了一款一階慣性系統(tǒng)的相關(guān)特性和PID控制下一階慣性系統(tǒng)的時(shí)域圖,可以完成對(duì)于一階慣性系統(tǒng)的部分控制實(shí)驗(yàn),完全開發(fā)達(dá)到使用者直接通過對(duì)實(shí)驗(yàn)系統(tǒng)前面版相關(guān)系數(shù)的更改來獲得所希望的一階慣性系統(tǒng)和PID控制效果的要求。
同時(shí)根據(jù)仿真數(shù)據(jù)可以直接得出對(duì)于相同的時(shí)間響應(yīng)信號(hào),PID控制環(huán)節(jié)的參數(shù)的改變對(duì)于其輸出的時(shí)域圖的影響可以總結(jié)得出:(1)當(dāng)積分系數(shù)和微分系數(shù)相同時(shí),比例系數(shù)越大,時(shí)間響應(yīng)曲線在穩(wěn)定前的增加速率越大;(2)當(dāng)比例系數(shù)和微分系數(shù)相同時(shí),積分環(huán)節(jié)系數(shù)越大,時(shí)間響應(yīng)曲線在穩(wěn)定前的增長(zhǎng)速率減小;(3)當(dāng)比例系數(shù)和積分系數(shù)相同時(shí),微分系數(shù)對(duì)于整個(gè)系統(tǒng)的影響較小。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
