源重構(gòu)近遠場變換的探頭補償算法
2022-12-01 08:14:50袁浩波董欣欣張瑞雪魯欖埔
上海交通大學學報 2022年11期
袁浩波, 董欣欣, 張瑞雪, 魯欖埔, 陳 曦
(西安電子科技大學 電子工程學院,西安 710071)
平面近場測量是天線測量與診斷的最重要技術(shù)之一,主要分成兩種.主流的技術(shù)采用平面波譜展開待測天線和探頭天線的近場,然后采用快速傅里葉變換算出待測天線的波譜[1].該方法一般用于測量窄波束天線.由于測量平面不可能無限大,需要進行截斷,所以平面近場測量的方向圖中存在一個可信角[2],在可信角范圍內(nèi)的結(jié)果比較可靠,在此范圍之外則不太可靠.即使采用某些特殊的技巧對截斷誤差進行彌補[3-4],也不能使得可信角范圍外的方向圖足夠準確.此外,平面近場測量難以得到天線的后向方向圖.
另一種平面近場測量方法稱為源重構(gòu)方法(SRM)[5-6].首先假定測量得到的接收信號即為待測天線的近區(qū)電場;然后采用等效磁流建立積分方程,并轉(zhuǎn)化為矩陣方程進行求解;最后對磁流積分得到遠場方向圖.該方法在快速多極子、圖形處理器(GPU)和機器學習等[7-9]最新技術(shù)的支持下,已經(jīng)廣泛應用于天線診斷、電磁成像和無相位測量等[10-16]各個方面.
SRM經(jīng)常用于平面掃描的近遠場變換,它最大的優(yōu)點是對掃描面沒有任何限制.比如該方法用于電磁場全息成像時[12],會將掃描面擴展為一個包圍待測天線的長方體盒子,從而避免掃描面截斷的問題.因此,SRM不需要考慮可信角,可以測量寬波束天線,還可以得到天線的后向方向圖.
然而,SRM存在兩個主要缺點.一是采用矩量法求解積分方程時速度較慢,這個問題目前可以通過快速多極子方法[8]或GPU計算[9]進行加速.另一個問題是,SRM還沒有合適的探頭補償算法,這制約了算法的使用范圍和發(fā)展前景.
最合理的SRM應該采用長方體包圍面,并配合完善的探頭補償算法.作為初步的嘗試,本文設(shè)計了一種基于互易定理的探頭補償算法,它適用于任意掃描面的情況.由于現(xiàn)有硬件設(shè)備不能進行長方體包圍面掃描,所以只討論平面掃描的情況.研究旨在摸索提高SRM精度的可能途徑,從而進一步改善天線測量、天線診斷以及電磁成像等實際應用的性能.
1 互易定理
圖1為平面測量系統(tǒng)的結(jié)構(gòu)圖.將待測天線記為A,探頭天線記為B,探頭在掃描平面S上進行測量.圖中:r=(x,y,z)為場點坐標;r′=(x′,y′,z′)為源點坐標;R=|r′-r|為源點與場點之間的距離.根據(jù)洛倫茲互易定理[17]可知探頭天線接收的信號功率為
(1)

根據(jù)等效原理,假定在天線A的口面附近建立一個無窮大平面S′,然后將S′的左側(cè)包圍區(qū)域全部替換成理想磁導體,而右側(cè)不變.那么S′上的等效磁流M(r′)可以在S′右側(cè)區(qū)域產(chǎn)生與原問題中EA和HA完全相同的場.這兩種場可以根據(jù)電場積分算子K和磁場積分算子L寫成等效磁流的表達式:
EA(r)=-K(M)=
企業(yè)的發(fā)展需要有效的平臺、工具進行支撐,科學的線上審批平臺讓企業(yè)的發(fā)展至少在管理和審批的業(yè)務上得到了充分發(fā)揮和應用。
(2)
G2(R)(r′-r)×(r′-r)×M(r′)]ds′
(3)
(4)
(5)
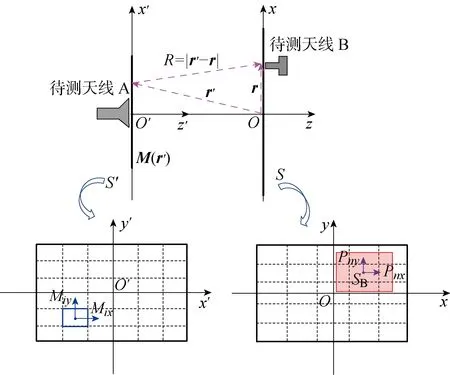
圖1 天線測量系統(tǒng)模型Fig.1 Antenna measurement system model
P(r)=
(6)
式中:sB為區(qū)域SB面積.上式右側(cè)是個雙重面積分,計算量較大.
2 矩量法求解積分方程
采用類似于文獻[5]中的矩量法求解式 (6).首先僅考慮有限大區(qū)域上的磁流分布和有限大的測量面,即對理論上無限大的磁流面S′和測量面S進行截斷.


最后,式(6)右側(cè)的積分區(qū)域SB的幾何中心位置rn由第n個采樣點確定.SB往往覆蓋S面上若干個矩形面片,其具體尺寸由探頭口面場的分布確定.比如對于波導探頭來說,其電磁場在口面之外快速衰減到幾乎沒有,因此SB一般取口面向外擴展1個波長即可.繼續(xù)擴大該尺寸,則算法消耗的時間快速增加,但對于整個算法精度的提高沒有明顯的作用.
采用上述離散過程可將式(6)展開為
(7)
(8)
寫成矩陣方程:
(9)
其中矩陣元素為
α=
(10)
β=
(11)
μ=
(12)
υ=
(13)
求解式(9)得到磁流分布的展開系數(shù),再通過式(2)即可算出待測天線的方向圖.式(9)的系統(tǒng)矩陣是強奇異性的矩陣,求解時很不穩(wěn)定.首先對系統(tǒng)矩陣進行奇異值分解[10],然后丟棄較小的奇異值以及對應的奇異矢量,最后解出磁流展開的系數(shù).這種解法相當于通過濾波壓制了數(shù)值誤差以及測量數(shù)據(jù)中的噪聲,因此得到的方向圖比較光滑.
3 計算結(jié)果
圖2所示的喇叭天線工作頻率為8.15 GHz,對應自由空間的波長λ= 36.81 mm.喇叭的口面尺寸為122.5 mm×84.5 mm.探頭天線為BJ70矩形開口波導,其口面大小為34.85 mm×15.80 mm.測量平面S大小為550.94 mm×512.94 mm,網(wǎng)格數(shù)設(shè)為 38×40,平面S距離喇叭天線口面150 mm,探頭天線距離測量平面1 mm.此測量系統(tǒng)的可信角范圍為[-55°,55°].等效磁流面S′大小為6λ×6λ,網(wǎng)格數(shù)為30×30,距離待測天線口面0.1λ.平面S和S′中心均與喇叭天線口面中心對齊.探頭天線口面附近進行互易定理積分的區(qū)域為SB.本文算法中系統(tǒng)矩陣的規(guī)模為 3 040×1 800,將探頭補償?shù)钠矫娌ㄗV算法[1]得到的方向圖作為對比的參考結(jié)果.
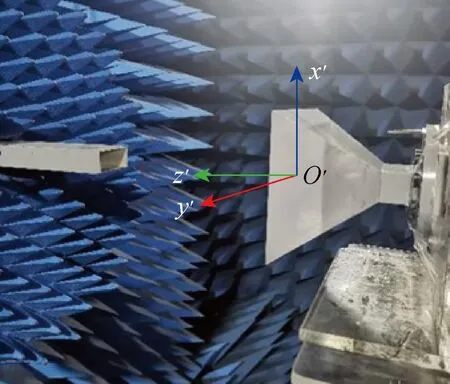
圖2 喇叭天線測量系統(tǒng)Fig.2 Measurement configuration of a horn antenna
首先取互易定理的積分面積sB=9λ2,測試不同奇異值截斷時的方向圖.如圖3和圖4所示,本文方法求解式(9)時奇異值σ的截斷主要影響方向圖左右兩側(cè),即可信角的附近范圍.圖中:θ為待求場點的矢徑與z′軸的夾角;Eunit為歸一化電場強度的幅度,Eunit=20lg(|E|/|E|max),其中E為電場強度,|E|max為最大電場幅度.保留的奇異值越多,則方向圖左右兩側(cè)的抖動越明顯,反之,則方向圖越光滑.這主要是因為采用脈沖基函數(shù)來表示等效磁流導致積分后填充的矩陣十分病態(tài),對誤差十分敏感,在保證矩陣特性的前提下保留較少的奇異值能夠有效抑制噪聲.從總體上看,奇異值的截斷對方向圖影響不大.圖中丟棄σmax×10-2以下奇異值時,僅保留了349個奇異值,此時E面和H面方向圖的均方根誤差(RMSE)只有0.53 dB和 0.56 dB.
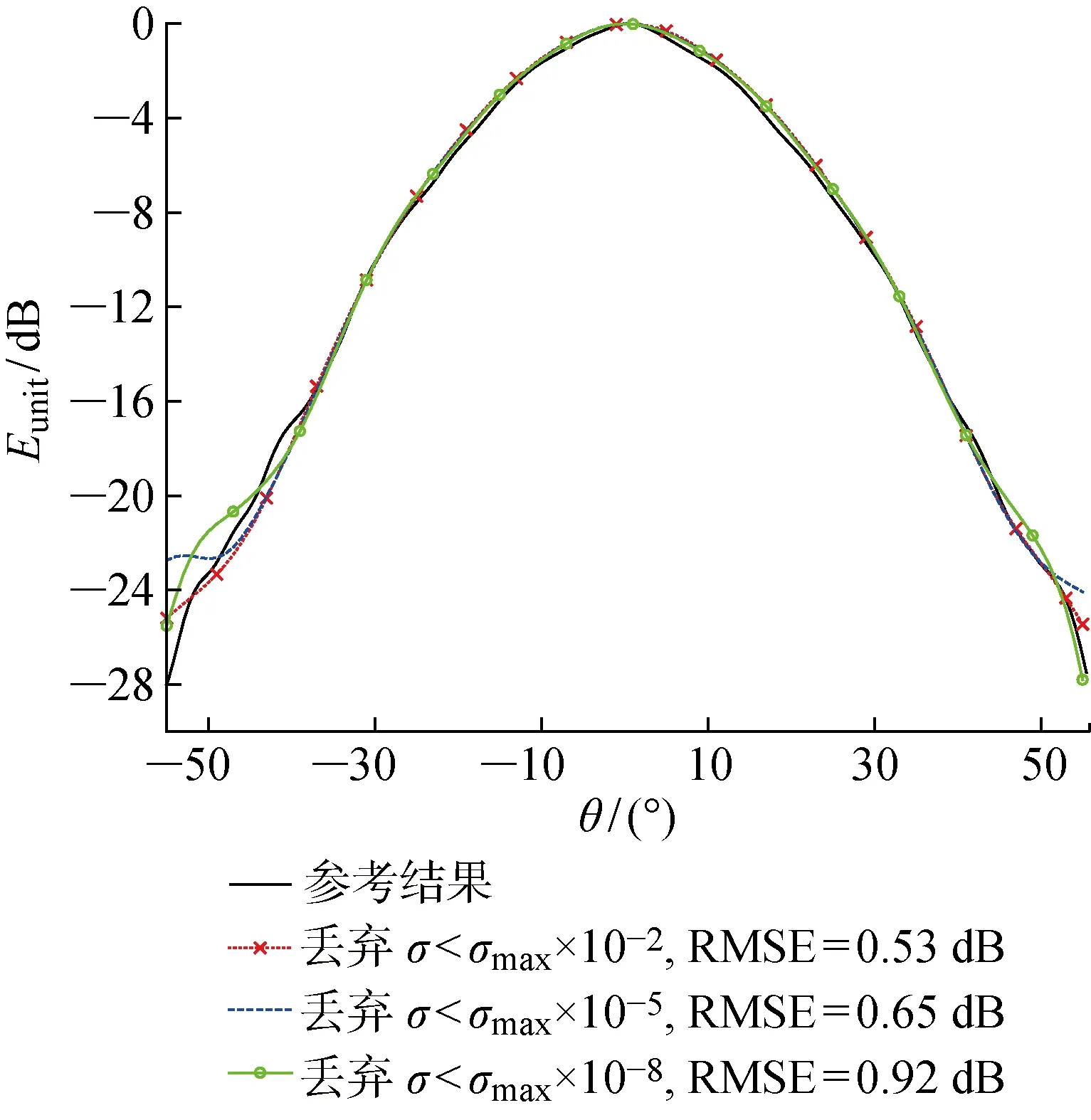
圖3 不同奇異值截斷時的E面方向圖Fig.3 E-plane pattern for different truncation of the singular value of the system matrix
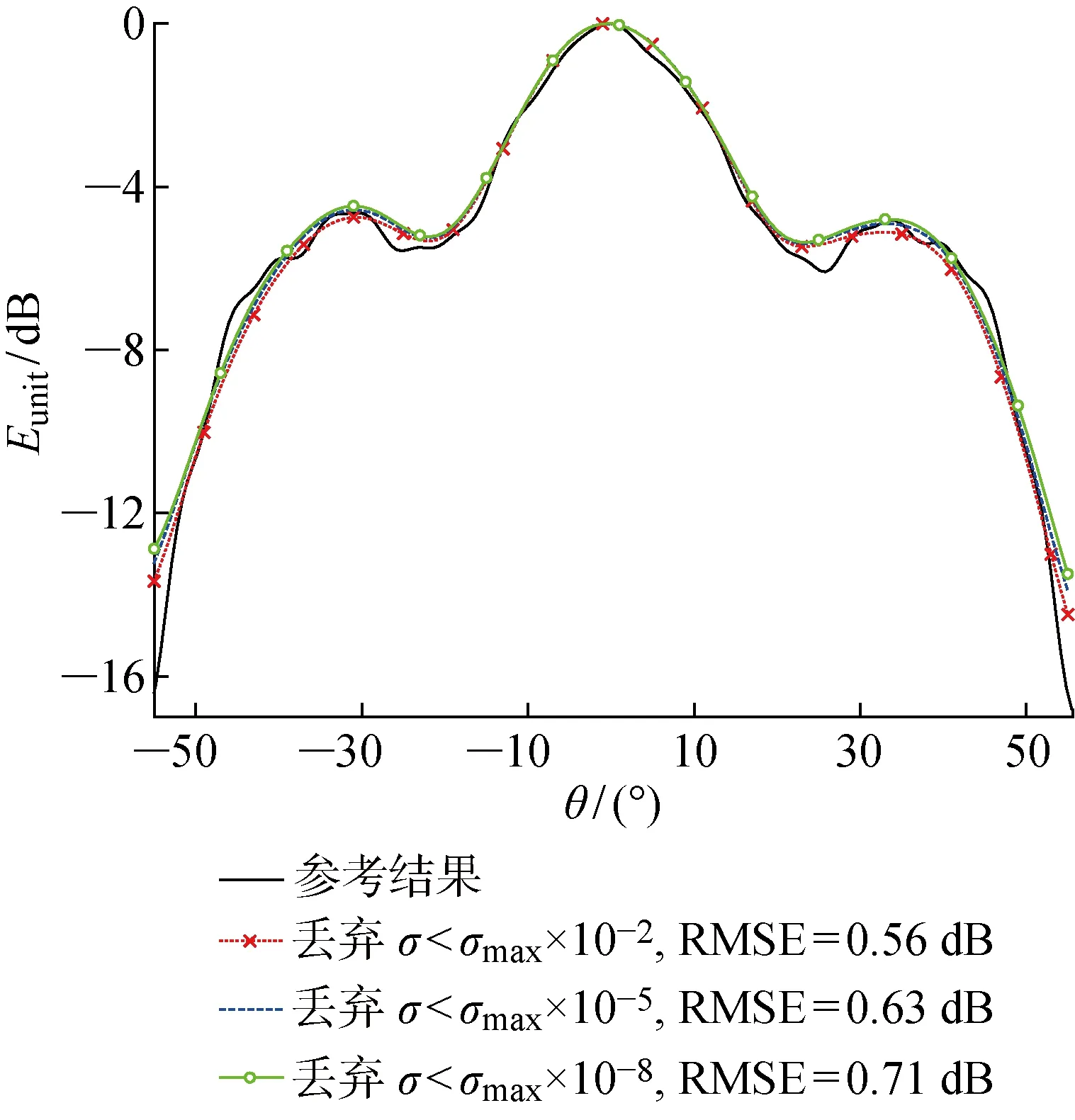
圖4 不同奇異值截斷時的H面方向圖Fig.4 H-plane pattern for different truncation of the singular value of the system matrix
其次,求解矩陣方程時丟棄σmax×10-2以下奇異值,測試不同積分面積sB時的方向圖.從圖5和圖6可見,積分面積sB越大,則計算結(jié)果越接近參考結(jié)果.但積分面積增加至一定程度時,計算結(jié)果將趨于穩(wěn)定.為了降低計算量,并保持較好的計算精度,sB一般取略大于波導探頭口面的尺寸即可.

圖5 不同積分面積sB下的E面方向圖Fig.5 E-plane pattern for different integral areas sB
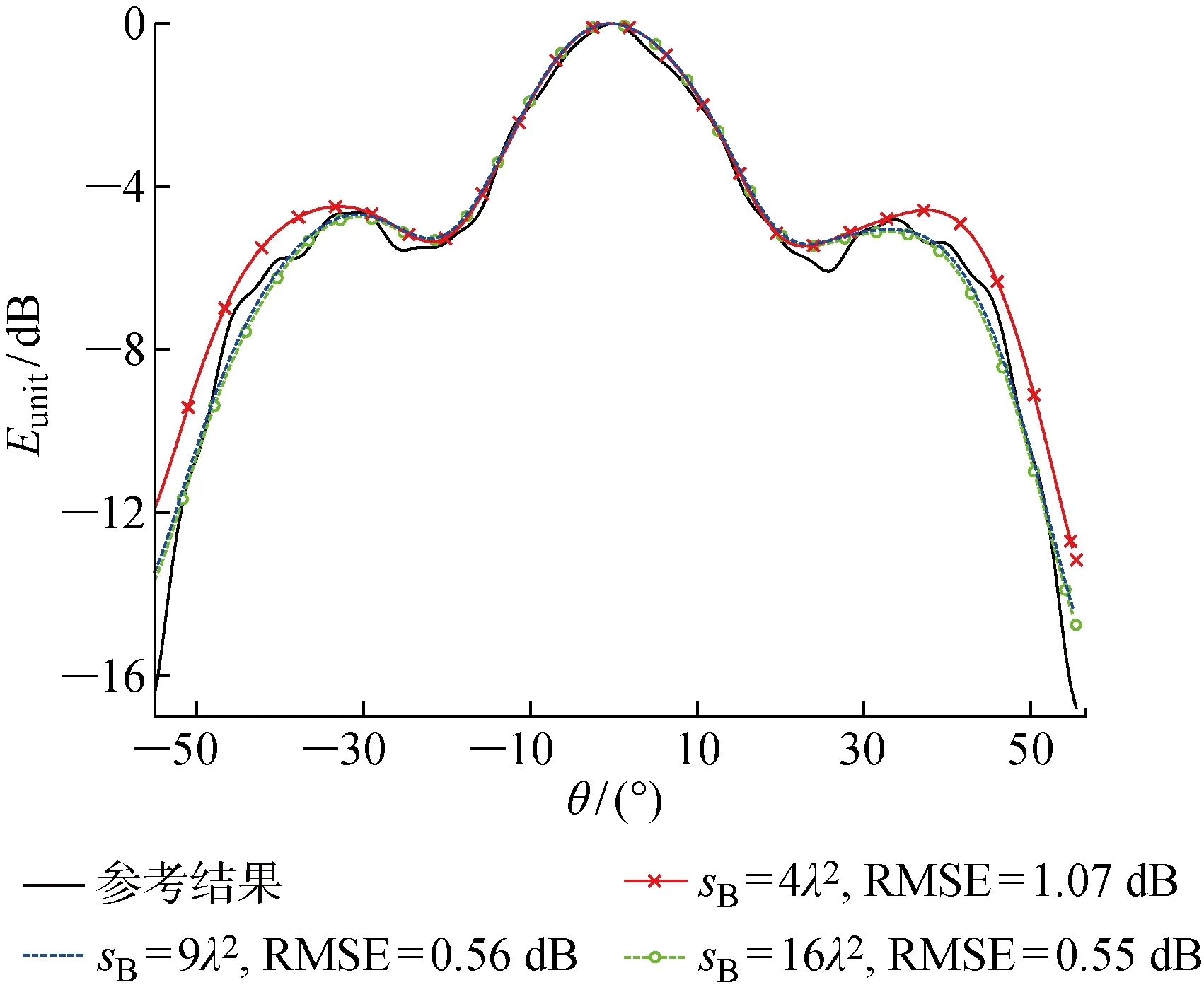
圖6 不同積分面積sB時的H面方向圖Fig.6 H-plane pattern for different integral areas sB
最后,在本文方法中取sB=9λ2,對σmax×10-2以下奇異值進行截斷,其結(jié)果與無補償?shù)脑粗貥?gòu)算法[5]以及探頭補償?shù)钠矫娌ㄗV算法對比.從圖7和圖8可以看出無補償?shù)脑粗貥?gòu)算法在磁面上的主瓣明顯偏離參考方向圖,其RMSE為2.21 dB;在E面上的RMSE也高達1.55 dB.而本文方法在兩個主面上的RMSE分別為0.53 dB和0.56 dB.因此本文的探頭補償算法更準確有效.在計算時間方面,無補償算法平均計算時間為10 s,平面波譜算法的平均計算時間為0.5 s,有補償算法由于需要在每次探頭移動后進行互易定理積分,平均計算時長為 134 s.測量算法運行一次即可得出結(jié)果,但縮短計算時間并不是該算法研究的重點.
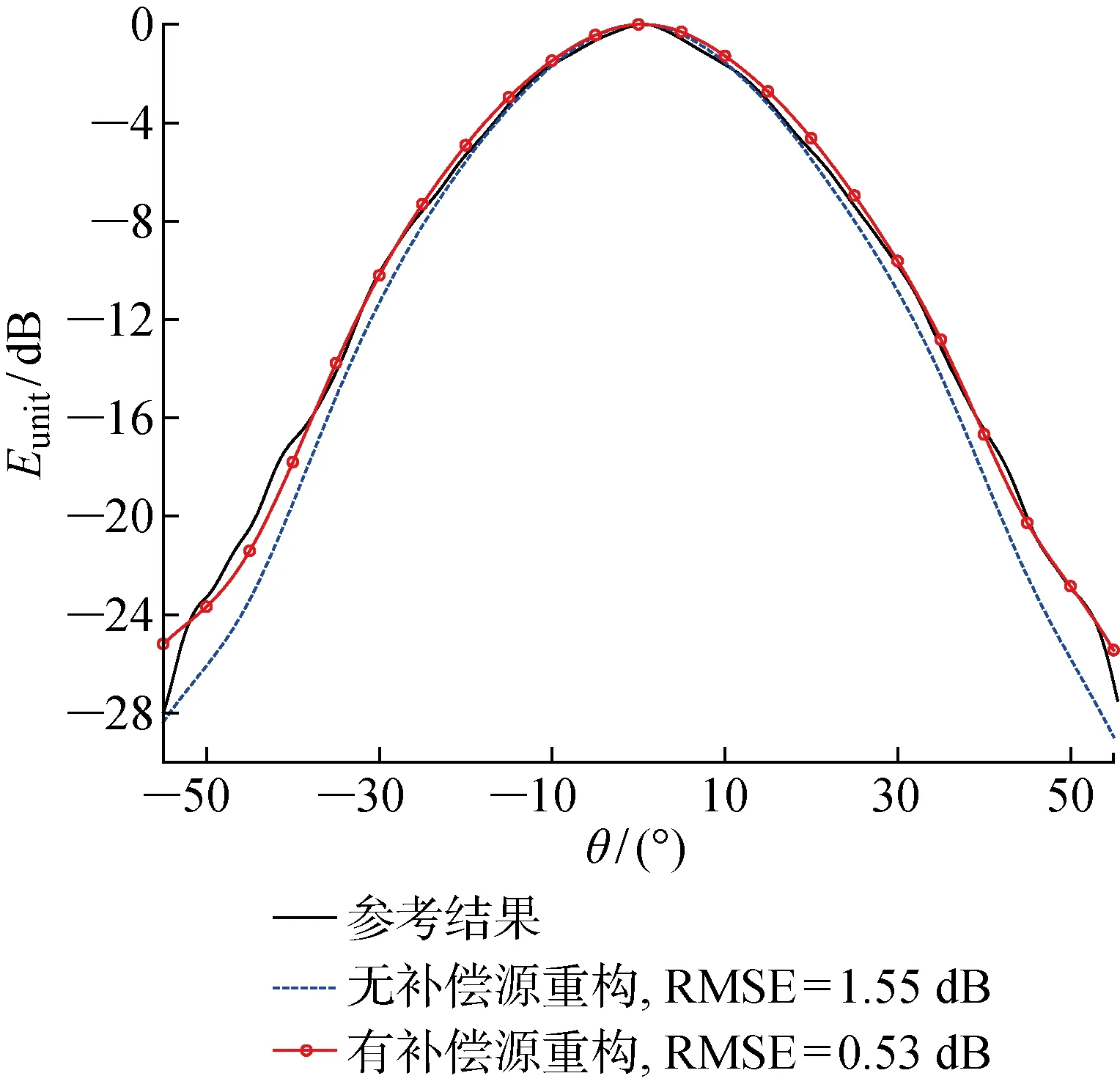
圖7 喇叭天線E面方向圖Fig.7 E-plane pattern of the horn computed by different methods

圖8 喇叭天線H面方向圖Fig.8 H-plane pattern of the horn computed by different methods
4 結(jié)語
本文提出一種對源重構(gòu)近遠場變換進行探頭補償?shù)乃惴ǎㄟ^喇叭天線的例子驗證該方法的有效性.此外,該方法對掃描面和測量探頭都沒有限制.后續(xù)工作中,首先將把掃描面擴展為長方體盒子的形式,以便解決平面近場測量中對于掃描面的截斷問題.其次將嘗試采用多探頭測量系統(tǒng)以提高測量效率,并通過本文方法進行補償,以實現(xiàn)高精度的測量.
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21