基于深度學習的地震速度譜自動拾取研究
2022-12-03 09:36:18崔家豪楊平王洪強邊策胡揚潘海俠
地球物理學報 2022年12期
崔家豪,楊平,王洪強,邊策,胡揚,潘海俠*
1 北京航空航天大學軟件學院,北京 100191 2 中國石油天然氣集團東方地球物理勘探有限責任公司,河北涿州 072750
0 引言
疊加速度分析是常規地震數據處理中的重要環節之一,也是層析反演、疊前偏移、阻抗反演和全波形反演等初始速度模型建立的基礎(潘宏勛等,2008;Taner and Koehler,2012).由于拾取疊加速度需要考慮地震噪聲、多次波、繞射波和構造復雜性等諸多因素的影響(戴曉峰等,2020),因此拾取工作需要具有豐富地震處理經驗和地質學術背景的人員來完成.隨著石油勘探技術的不斷進步,地震數據的規模和復雜性在近些年來一直在不斷增長,而傳統人工能量團識別與疊加速度拾取的工作模式容易受拾取標準不一致及人為因素干擾而產生誤差,難以滿足實際生產過程中對拾取精度和效率的要求.如何從速度譜中自動拾取疊加速度成為該行業面臨的挑戰之一.當前速度譜自動拾取的方法主要包括優化搜索方法和機器學習方法.
基于優化搜索的方法是在層速度約束條件下,采用迭代或搜索算法尋找地質上合理的速度模型.算法以層速度作為初始模型,通過反演的方式來得到最優的速度模型.Toldi(1989)最先提出基于速度譜中疊加能量的自動速度拾取方法.Zhang(1991)將Viterbi算子引入到地震資料處理中并解決了關于拾取的一些問題,林年添等(2013)對該方法進行了改進,將用于圖像處理的光順技術引用到速度譜能量團曲面的處理環節,借以提高速度譜的分辨率,然后再通過Viterbi算法自動搜索及獲取最優解.Lumley(1997)和陳志德等(2002)提出了一種利用蒙特卡洛方法對初始速度加以隨機擾動來自動拾取層速度.Almarzoug和Ahmed(2012)將速度拾取視為變分問題,通過有限差分法求解最優拾取軌跡.Leite和Vieira(2019)將非線性優化方法應用于速度拾取中,在滿足邊界條件的前提下設置合理的搜索帶寬,然后運行非線性函數智能拾取.Li和Biondi(2009)以及Oliveira等(2013)分別將模擬退火算法和遺傳算法應用于速度拾取中.這些方法在獲取相對簡單地質體的速度時已經取得了一定的效果,但是對于橫向速度突變的地區拾取準確性相對不高,且需要過多設置算法超參數、初始化模型,這并不能實現完全的自動取速過程.
基于機器學習的方法是通過學習速度譜中能量團的特征來獲取疊加速度.在近期的研究中,Huang和Yang(2015)采用Hopfield神經網絡(Hopfield Neural Network,HNN)對速度譜圖像中的速度進行自動拾取.Smith(2017)和Song等(2018)將基于無監督學習的聚類分析技術應用于速度譜自動拾取過程中.該方法依據不同的屬性將速度譜劃分為若干個類別,每個類別中的數據具有一些共同的特征,通常根據某種距離度量進行分組,然后將聚類中心映射為正確的“時間-速度”對.K-means聚類是最常用的聚類方法之一(Hung et al.,2013;Ahmad and Hashmi,2016),該算法使用歐幾里得距離度量將每個數據點分配到最近的聚類中心.對于每個聚類中心,計算分配給它的所有數據點的平均值,這個平均值成為聚類中心的新位置,每個聚類的聚類中心即為我們所要拾取的疊加速度點.然而傳統的K-means聚類方法容易受到離群點的影響,使得聚類中心偏離主要數據區域.Liu等(2018)提出了一種相似加權K-means聚類的新方法,該方法對不同信噪比的數據點賦予不同的權值,使聚類中心更接近權重大的數據點.由于不同速度譜所需拾取的能量團個數不一致,Chen和Schuster(2018)以及王迪等(2021)新提出了一種自底向上的策略來實現K-means迭代過程,該方法可以逐步迭代找到聚類類別最少的聚類分布.除此之外,加速聚類算法(Zhang and Lu,2016)以及DBSCAN聚類(Schubert et al.,2017;Bin Waheed et al.,2019)也被應用于智能速度譜解釋過程中.然而傳統機器學習方法也存在一些問題,如易受到噪聲和離群點影響,部分拾取點偏離主要數據區域,進而影響到速度拾取精度.近年來,隨著計算機性能的提高,應用深度學習方法拾取疊加速度的研究越來越多.Ma等(2018)以及Biswas(2018)和Fabien-Ouellet等(2020)分別采用卷積神經網絡(Convolutional Neural Network,CNN)和循環神經網絡(Recurrent Neural Network,RNN)來拾取速度譜中的疊加速度.在信噪比較高的工區中,以上深度學習方法可以提高疊加速度的拾取精度,但對于信噪比低的工區,速度拾取的準確性不足且受到噪聲的干擾比較大.
為了有效解決速度拾取準確率不高的問題,本文提出了一種深度學習的方法.該方法將速度譜視為圖像進行處理,結合目標任務特點改進了基于卷積神經網絡的FCOS目標檢測模型(Tian et al.,2019)用于速度譜中疊加速度的自動拾取.與傳統的目標檢測網絡不同,改進后的FCOS檢測器具有以下優點:①顯著減少了設計參數的數目,一方面提升了對能量團檢測的識別效果,同時構建的混合損失函數增強了模型對能量團檢測的敏感度,使得能量團識別和疊加速度拾取僅通過深度學習模型即可完成,保證了識別和拾取處理結果的一致性.②由于預測目標為疊加速度點,每個點在速度譜上的邊界框具有固定的大小,使用改進后的FCOS可直接對邊界框進行回歸,從而避免了復雜的計算,極大地減小了內存占用并使得訓練速度更快.
另外,當地震資料受多次波干擾較強時,除去一次波反射能量團以外,多次波也能形成能量團,尤其當多次波與一次波速度相差較大時,速度譜能量團聚焦特征變差,在同一時刻出現多個能量團.由于能量團較為分散,改進后的FCOS模型只能夠拾取到近地表淺層的疊加速度,對于地下深層區間的疊加速度僅通過單一的FCOS模型未能有效識別,因此在處理低信噪比探區時本文在FCOS后又加入基于深度神經網絡(DNN)的線性回歸模型以擬合出全局速度曲線.我們從方法原理及模型訓練與測試等角度闡述了本文方法的操作流程,并應用Ma等(2018)提出的傳統的CNN方法與本文方法處理相同的數據集來對比驗證本文方法的有效性.模型和實際地震數據的測試結果表明該網絡模型準確度較高,模型魯棒性強,能夠較好的實現對復雜工區的速度譜中疊加速度的自動拾取.
1 方法原理
1.1 模型整體結構設計
結合目標任務特點設計的滿足上述需求的網絡模型的整體設計流程如圖1所示.該模型分為卷積神經網絡和線性回歸網絡兩部分.首先對包含速度譜圖像及其標簽數據的數據集進行處理使其滿足網絡的輸入要求,然后將標簽數據集輸入到基于CNN的FCOS模型中提取能量團的特征并計算能量團的位置.該模型能夠對提取到的多尺度特征進行融合,從而提升能量團檢測精度.卷積神經網絡階段輸出的中間結果為預測的“時間-速度”對序列.受多次波及噪聲等影響,速度譜圖像中存在信噪比較低且能量團不夠聚焦的區域,在該區域FCOS模型只能完成淺層區域內疊加速度的自動拾取.針對這一情況我們引入人工判別機制,當預測結果滿足拾取要求時,可直接輸出中間結果為最終的智能拾取結果;當預測結果不能滿足拾取要求時,需要加入基于DNN的線性回歸模型來擬合出能量團聚焦特性較差區域的速度曲線.本章2、3小節分別對FCOS和線性回歸網絡展開詳細介紹.
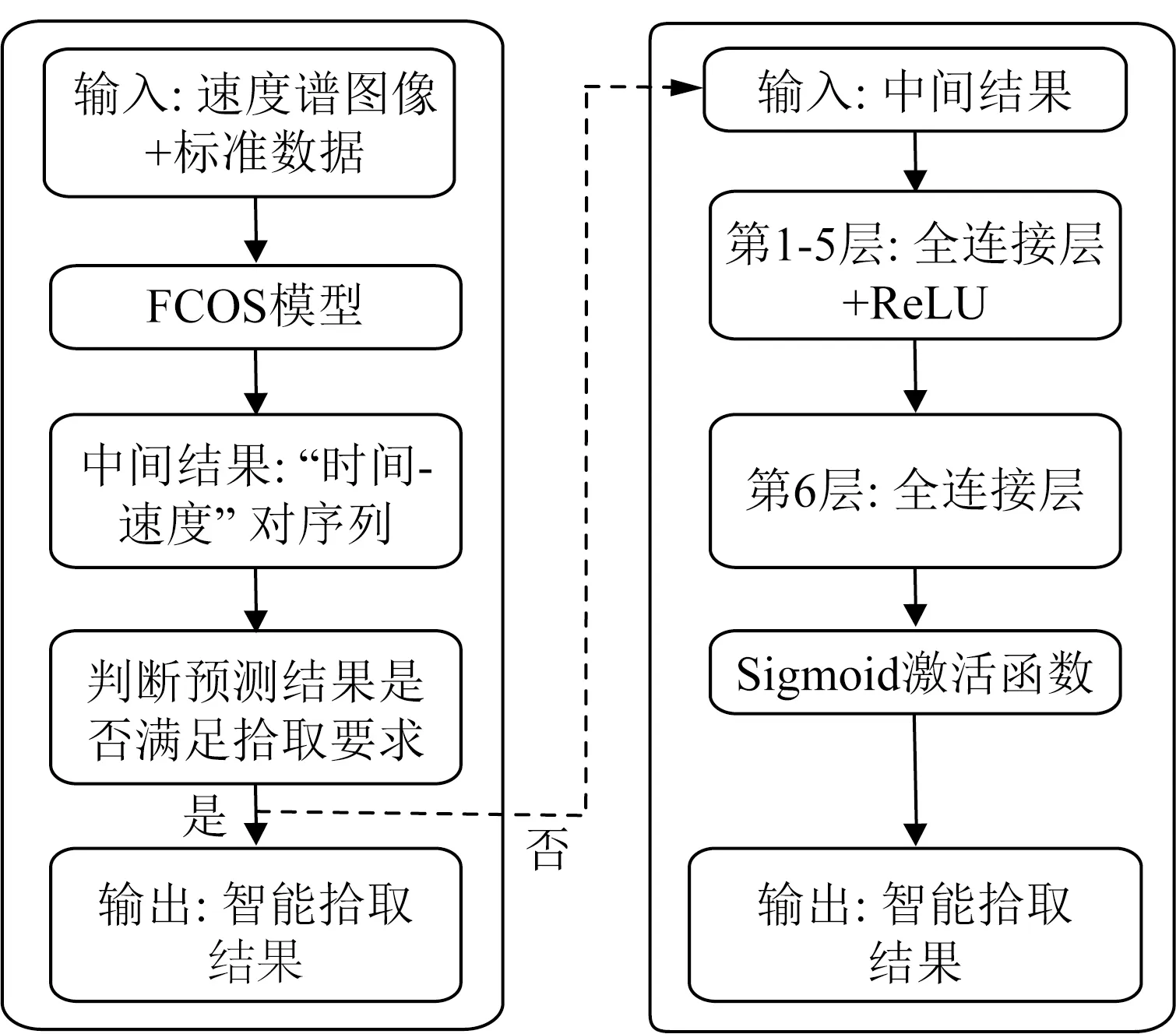
圖1 模型整體設計流程圖Fig.1 Overall design flow chart of the model
1.2 FCOS網絡結構與工作原理
本文針對能量團結構復雜、體積小,在速度譜中難以檢測等難點對FCOS網絡進行了改進,改進后的模型更適用于識別和定位速度譜中能量團的位置.如圖2所示,首先通過一個卷積層和一個最大池化層將原始圖片轉化為特征圖.卷積操作(Convolution)采用卷積核提取能量團的特征,該操作能突破傳統機器學習方法的限制,通過共享多個卷積核的權值,來學習每張速度譜圖片的局部信息,并用于構建抽象特征圖譜.卷積核共享特性大大降低了訓練網絡所需的參數量.最大池化操作(Maxpooling)將卷積處理后生成的特征圖劃分為若干個矩形區域,對每個子區域輸出最大值,從而有效的壓縮數據空間的大小,避免在模型訓練過程中出現過擬合.然后將最大池化操作產生的特征圖輸入到4級降采樣(Down-sample)模塊中,每一級包含有若干個降采樣過程,用于逐級提取數據特征.降采樣模塊的設計可以降低特征的維度并保留有效信息,一定程度上減少了計算量,有效解決了傳統CNN網絡隨層數的加深容易出現的梯度爆炸或梯度消失等問題.選用1×1大小的卷積核對第4級降采樣模塊輸出的特征圖進行卷積操作,得到P5特征層.然后使用步長為2大小為3×3的卷積核對P5特征層進行兩次降采樣得到P6、P7特征層.同時對P5特征層進行兩次上采樣(Up-sample),上采樣階段通過轉置卷積操作(Deconvolution)來提升特征圖的大小.分別將上采樣后得到的高層特征與對應的殘差網絡模塊相同放大倍數的低層特征進行融合(Concatenate)得到P3、P4特征層,融合操作可將低層次的細節信息與高層次的語義信息結合到一起,從而使特征提取更完備.通過上述操作可在5個不同尺寸的特征層上進行目標檢測,從而實現對較小目標與多尺度目標的準確識別.本文中卷積層和上采樣層均采用ReLU非線性激活函數,并在卷積階段對圖像的邊緣進行填充,使邊緣信息提取更加充分.
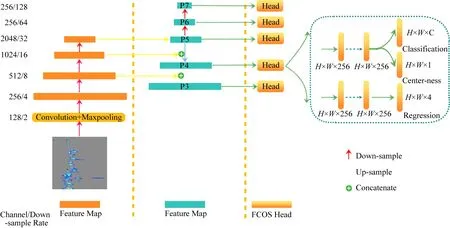
圖2 FCOS結構圖左側降采樣模塊用于逐層提取特征;中間部分進行多尺度特征融合;右側是多個共享權重的FCOS檢測頭.參數含義:通道數Channel和降采樣率Down-sample Rate(標注于每層左側),H×W×C表示圖像的高×寬×通道數.Fig.2 FCOS structure diagramThe left Up-sample module is used to extract features layer by layer;Multi-scale feature fusion was performed in the middle part;On the right are multiple FCOS detection heads with shared weights.Parameter meaning:Channel number and Down-sample Rate (marked on the left of each layer).H×W×C represents the height × width × number of channels of the image.
FCOS的檢測模塊總體分為類別判斷分支(Classification)與位置回歸分支(Regression),它作用在特征融合后的多個不同層級的特征圖上,同時這些檢測模塊的權值共享.模型的損失函數如(1)式展示:
(1)
(2)
(3)
整體損失函數由類別損失Lcls與位置損失Lreg組成.對于類別損失,采用交叉熵損失(focal loss)的設計,其含義為目標與預測值之間概率分布的距離,交叉熵越小,概率分布越接近.它能夠較好地解決樣本不均衡問題.對于位置損失,采用交并比損失(IOU loss)的設計,其含義為預測框與標注框的交集與并集的比值,它能夠編碼空間相關性信息輔助更加準確地定位.
1.3 線性回歸網絡結構與工作原理
在不考慮速度倒轉的情況下疊加速度會隨著時間的增大而增大,在處理能量團聚焦特性較差的速度譜時,經驗較為豐富的專家一般會根據拾取到的淺層疊加速度的線性趨勢來完成對較深地層中疊加速度的拾取.而僅僅依靠單個目標檢測網絡很難處理復雜地質體條件下的能量團識別問題.為了完善本文的算法方案,我們在FCOS模型的基礎上設計了一個線性回歸網絡,其本質為深度神經網絡(DNN)模型.該網絡主要由輸入層、隱藏層和輸出層等層級結構組成(圖3),可通過學習淺層區域內疊加速度的線性趨勢來完成對較深地層中疊加速度的預測.網絡的輸入為FCOS模型自動拾取的“時間-速度”對,隱藏層由若干個全連接層構成,全連接層的作用為擬合經插值處理后形成的全局速度曲線,其前向計算公式為
(4)


(5)
使用ReLU激活函數可以克服訓練過程中出現的梯度消失等問題,加快訓練速度.損失函數采用l2Loss,其形式如下:
Loss(z[l],y)=0.5×(z[l]-y)2,
(6)
式中y表示網絡的輸入值,z[l]表示第l層輸出的數值矩陣.全連接層的反向傳播過程如下:
dx=?Loss/?u,
(7)
其中u表示任意變量,包括z,x,W,b等.通過一系列前向和反向傳播過程來不斷更新網絡模型的參數,直到Loss層的梯度保持平穩不再下降.網絡最后一層采用sigmoid激活函數進行二分類任務,使輸出轉換為0~1之間的概率分布,公式表示如下:
(8)
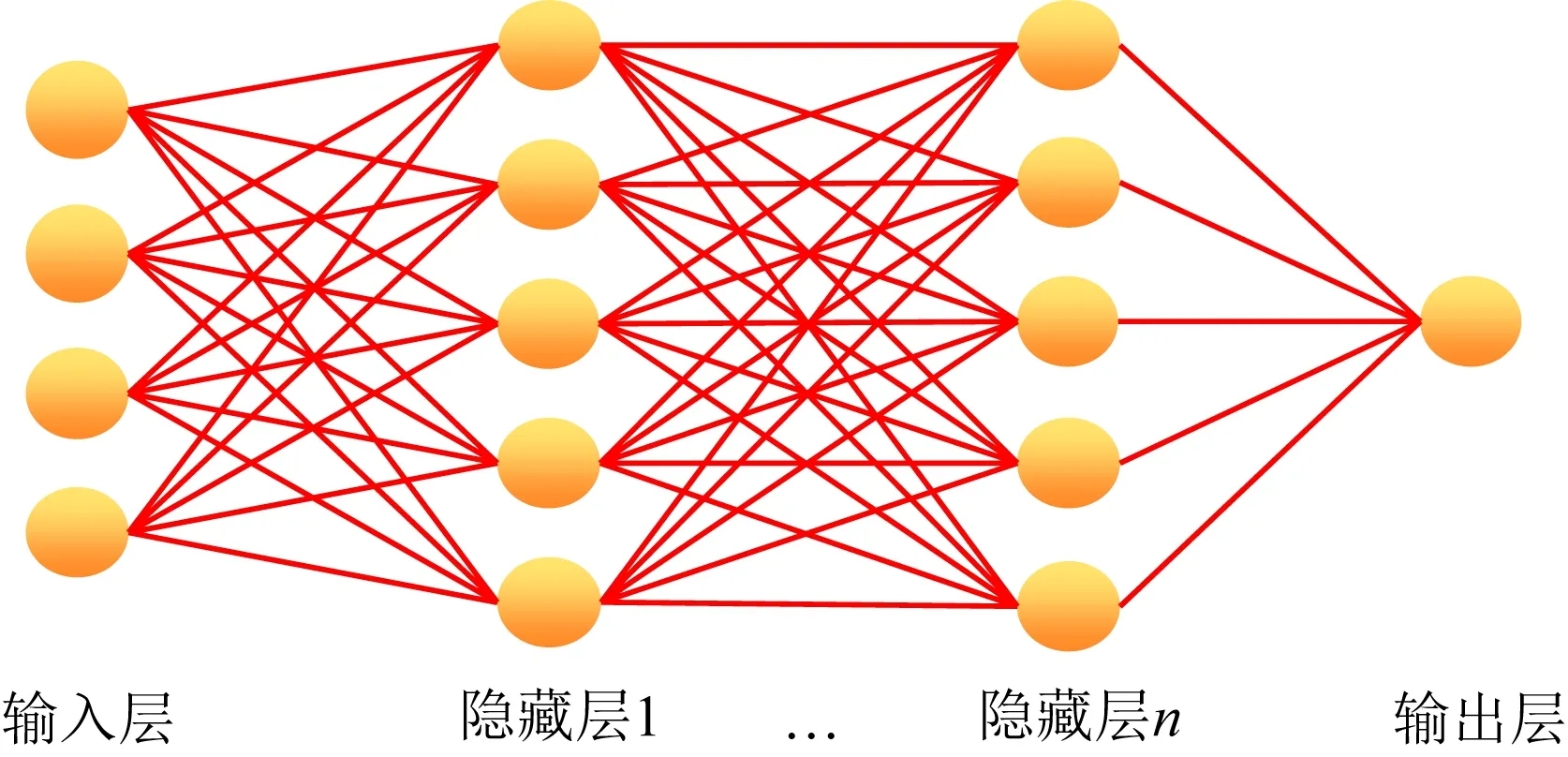
圖3 線性回歸網絡結構圖Fig.3 Linear fitting network structure diagram
2 實驗與結果分析
為了驗證提出方法的可行性,采用Marmousi模型數據和兩個實際探區數據對本文方法進行測試.在訓練階段采用小批量梯度下降法,我們設置batchsize為2,其含義為進行一次訓練所抓取的數據集樣本數量.訓練過程中以一個batchsize為最小結構單元進行損失函數計算和參數梯度更新,并采用雙線程計算以提升程序的運行效率.實驗選取Adam算法來解決參數更新過程中的優化問題,基礎學習率設置為0.01,共計訓練24個輪次,分別在第8輪和第11輪進行學習率衰減,權重衰減系數設置為0.0001.實驗應用Pytorch深度學習框架,并使用GPU來加速訓練過程.
本文使用平均準確度均值(mAP)來評估目標檢測器的有效性,mAP的計算方法如公式(9)—(10)所示:
(9)
(10)
其中P表示精準度,其含義為所有預測為正樣本的樣本中正樣本所占比例;R表示召回率,其含義為正樣本被預測正確的比例.TP表示既是正樣本又被預測為正樣本的個數;FP表示負樣本被預測為正樣本的個數;FN表示正樣本被預測為負樣本的個數.精準度和召回率始終處于矛盾的狀態,當其中一個增高,必然意味著另一個降低.以PR為橫縱坐標建立坐標系,AP(Average Precision)計算方法為PR曲線下覆蓋的面積,所有類別的AP進行平均,得到的即為mAP (mean Average Precision).對于目標檢測器的評估方法,其mAP越高,檢測方法越有效.
2.1 模型數據
首先應用二維的Marmousi模型對本文方法進行測試,從該模型中等間隔抽取了900道作為本次測試的真實層速度場(圖4).選用主頻為35 Hz的雷克子波通過聲波波動方程有限差分法對該速度模型正演得到一系列CMP道集,然后對CMP道集進行速度掃描,共計算得到900張速度譜圖像.再經由專家來人工拾取速度譜中的疊加速度,并從某商業軟件中導出統一大小的速度譜圖像及其對應的疊加速度做為標簽數據.將數據集按8∶1∶1分為訓練集、驗證集和測試集三部分,用于訓練速度譜識別模型并對該方法進行檢驗.在訓練階段使用梯度反向傳播的方法來不斷地更新優化Loss函數,并使用mAP來衡量檢測模型在驗證集上精度表現的優劣,實驗結果如圖5所示.
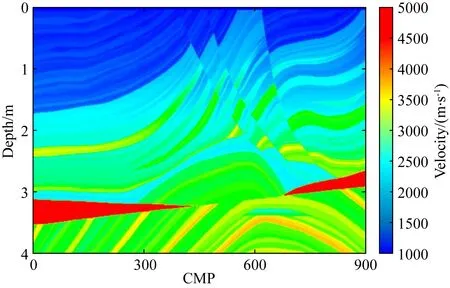
圖4 層速度場模型Fig.4 Interval velocity model
從圖5中可以看出通過梯度反向傳播的方式來不斷地更新和優化Loss后,本文方法相較傳統CNN方法得到的Loss曲線更為收斂,且應用本文方法訓練的目標檢測器在Marmousi數據集上的mAP精度最高為74.1,而傳統CNN方法在Marmousi數據集上的mAP精度最高僅為54.5.上述結果驗證了本文方法在速度譜能量團檢測上的有效性.
選擇訓練好的FCOS模型對測試集中的速度譜圖片進行預測.圖6(a,b)分別展示了應用傳統CNN方法及本文方法拾取的疊加速度和真實均方根速度的對比.從圖中可以看出在淺層區間不存在多次波的干擾,能量團集中在一個較窄的速度范圍內,聚焦較好.而在2.5 s以后多次波干擾較大,多次波速度與一次波速度疊加在一起導致能量團逐漸發散,在同一時刻出現多個能量團.受深層多次波干擾的影響,傳統CNN方法(圖6a)僅能拾取到0.4~3.0 s時間范圍內的速度,且該方法在2.3~3.0 s區間內拾取結果遠偏離真實值;而FCOS方法(圖6b)得到的速度曲線與真實值非常近似,證明該方法能夠有效避免多次波的影響,使拾取結果具有更高的精度.圖6(c—f)分別展示了Marmousi模型中第400道動校正前后的CMP道集,從動校正后的道集中可以看出,FCOS方法(圖6e)拾取的速度拉平了淺層的同相軸,而深層區間受多次波剩余時差較大影響,導致同相軸隨偏移距增大具有下拉現象;而傳統CNN方法(圖6d)在2.3~3.0 s區間選取比疊加速度小的多次波速度進行動校正,導致同相軸被錯誤的拉平.將FCOS方法得到的動校正后道集與真實速度動校正后道集(圖6f)進行對比后發現二者主要反射同相軸拉平程度相一致,也驗證了本文算法的有效性.
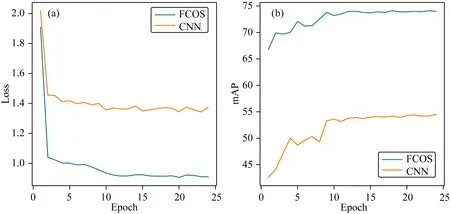
圖5 Marmousi模型Loss曲線圖(a)及mAP曲線圖(b)Fig.5 Marmousi model loss curve (a) and mAP curve (b)
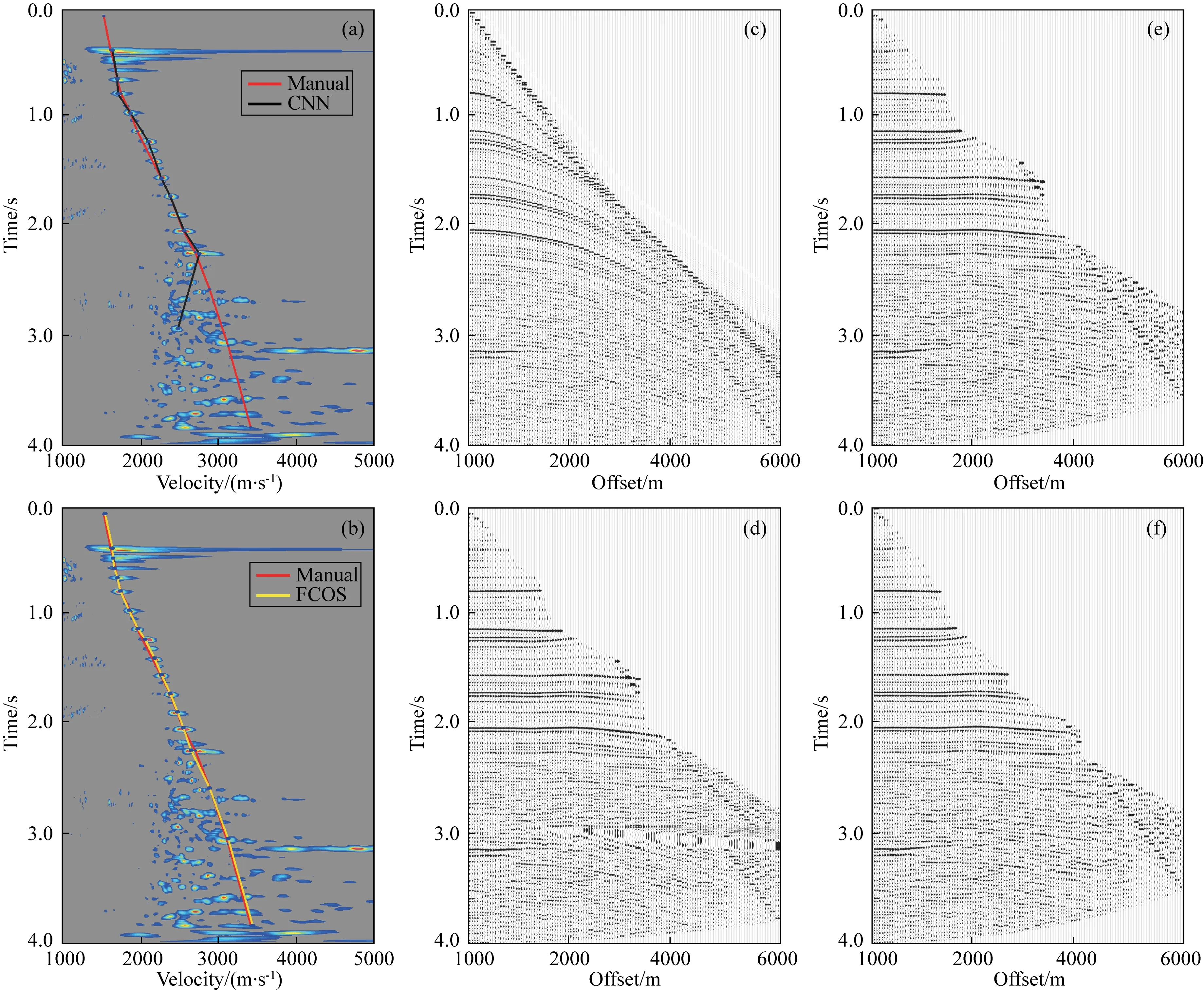
圖6 Marmousi模型預測結果(a) 傳統CNN方法拾取的速度曲線;(b) 本文方法拾取的速度曲線;(c) CMP400道集;(d) 傳統CNN方法拾取速度動校正;(e) 本文方法拾取速度動校正;(f) 人工拾取速度動校正.Fig.6 Prediction results of Marmousi model(a) Velocity curve picked up by traditional CNN method;(b) Velocity curves picked up by the method in this paper;(c) CMP400 gather;(d) NMO gather corrected of the stacked velocity picked up by traditional CNN method;(e) NMO gather corrected of the stacked velocity picked up by the method in this paper;(f) NMO gather corrected of the stacked velocity picked up by manual method.

圖7 Marmousi模型疊加速度場(a) 人工方法拾取的速度場;(b) 傳統CNN方法自動拾取的速度場;(c) 本文方法自動拾取的速度場.Fig.7 Stacking velocity field of Marmousi model(a) The velocity field picked up by manual method;(b) Velocity field automatically picked up by traditional CNN method;(c) The velocity field automatically picked by the method in this paper.
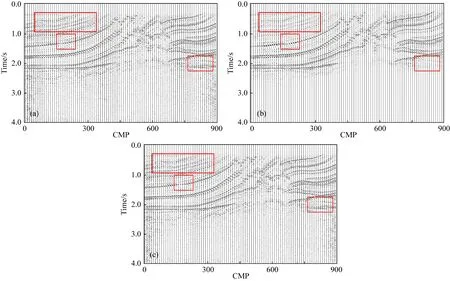
圖8 Marmousi模型疊加剖面(a) 人工方法拾取的速度場疊加;(b) 傳統CNN方法自動拾取的速度場疊加;(c) 本文方法自動拾取的速度場疊加.Fig.8 Stacked sections of Marmousi model(a) The Stacked section of velocity field picked up by manual method;(b) The Stacked section of velocity field picked up by traditional CNN method;(c) The Stacked section of velocity field picked up by the method in this paper.
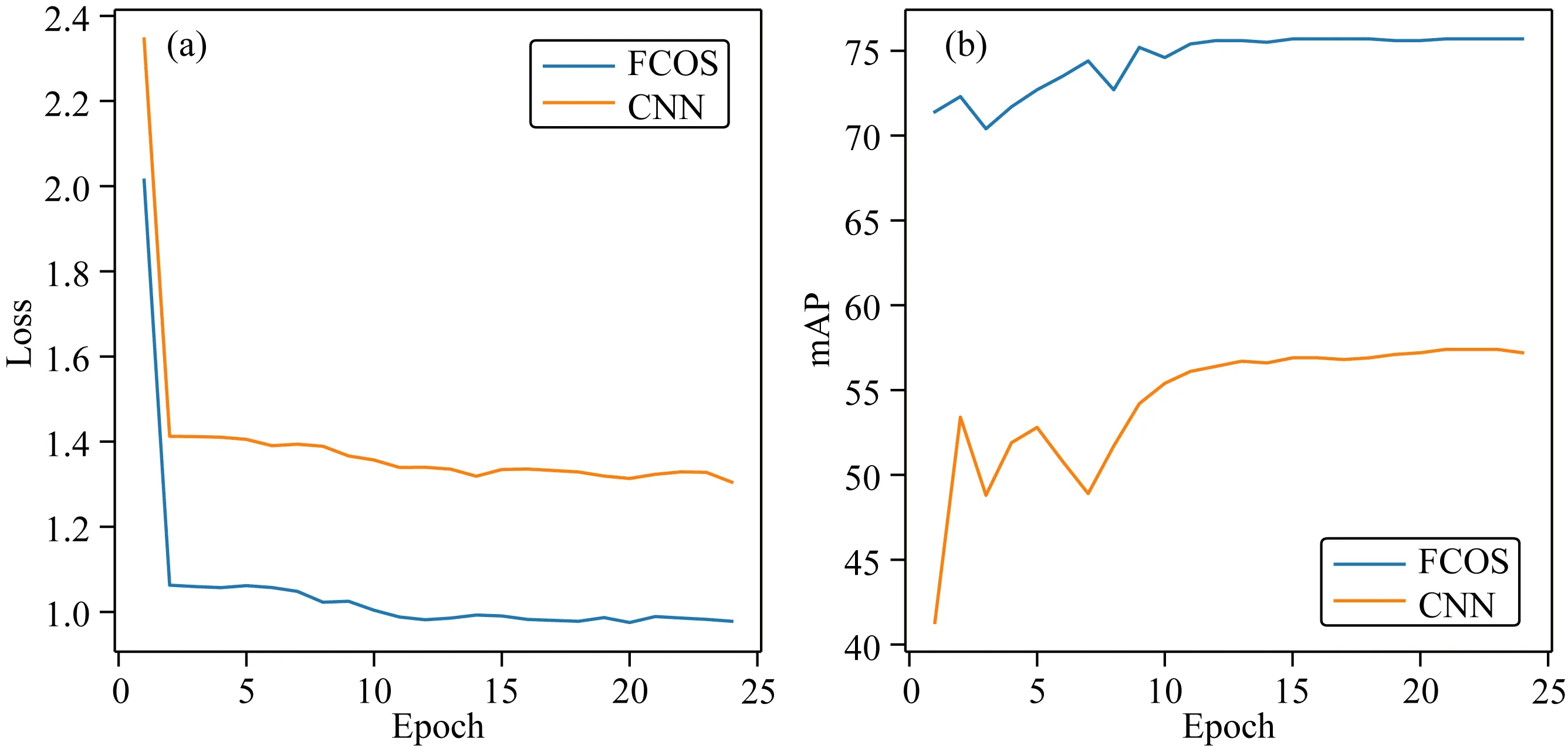
圖9 實際探區數據Loss曲線圖(a)及mAP曲線圖(b)Fig.9 Actual exploration area data loss curve (a) and mAP curve (b)
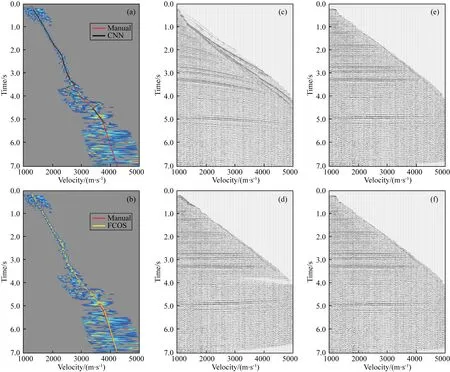
圖10 實際數據CMP道集(a) 傳統CNN方法拾取的速度曲線;(b) 本文方法拾取的速度曲線;(c) 2560測線CMP2240道集;(d) 傳統CNN方法拾取速度動校正;(e) 本文方法拾取速度動校正;(f) 人工拾取速度動校正.Fig.10 CMP gather of actual data(a) Velocity curve picked up by traditional CNN method;(b) Velocity curves picked up by the method in this paper;(c) CMP2240 gather in the2560Line;(d) NMO gather corrected of the stacked velocity picked up by traditional CNN method ;(e) NMO gather corrected of the stacked velocity picked up by the method in this paper;(f) NMO gather corrected of the stacked velocity picked up by manual method.
對整個Marmousi模型數據集進行預測,并將本文方法自動拾取的疊加速度場(圖7c)與傳統CNN方法得到的疊加速度場(圖7b)和人工方法得到的速度場(圖7a)進行對比.總體上看,本文方法拾取的速度場在構造刻畫與連續性上與人工方法得到的速度場基本相同;而傳統CNN方法拾取的速度場在深層區間(2.5~4.0 s)內速度值偏小,且橫向連續性較差.以CMP間隔為10將動校正后的道集進行同相疊加形成疊加剖面.與傳統CNN方法得到的疊加剖面(圖8b)相比,使用本文方法得到的疊加剖面(圖8c)在淺層成像更加清晰,對構造細節刻畫地更為準確,而傳統CNN方法得到的疊加剖面受多次波等因素的影響,在淺層部分區間同相軸橫向波動較大,在3.0 s以后未見明顯地震反射(如紅色框所示);與人工拾取拾取速度場得到的剖面相比(圖8a),本文方法得到的疊加剖面在構造連續性與清晰度上與人工方法基本一致,這進一步證明了本文方法的有效性.
2.2 實際數據
基于模型數據的實驗結果,分別選用不同信噪比的實際探區數據對傳統CNN方法和本文方法進行了測試.首先選用中國西部某陸上三維探區真實數據集,該探區信噪比較高,偏移距展布范圍為0~8 km,數據的時間總長度7 s,采樣間隔為2 ms.從中等間隔抽取若干條測線,并以相同間隔從每條測線上抽取CMP道集,共獲得包含1000張速度譜圖像的數據集.將生成的數據集按 8∶1∶1分為訓練集、驗證集和測試集三部分,用于訓練傳統 CNN 方法和本文方法設計的速度譜識別模型并對實驗結果進行測試.訓練過程中梯度下降損失和推理過程中mAP精度表現如圖9所示.從圖9中可以看出本文方法計算梯度下降得到的Loss曲線更為收斂,且應用本文方法訓練的目標檢測器在Marmousi數據集上的mAP精度最高為75.7,而傳統CNN方法在Marmousi數據集上的mAP精度最高僅為57.4.
圖10展示了采用兩種方法得到的2560測線上CMP2240道集的速度拾取結果及動校正前后的道集.為了增加對比效果,將人工拾取的速度曲線與網絡模型自動拾取的速度曲線可視化到同一個速度譜中.圖10(a,b)分別展示了兩種方法的拾取結果,從速度譜中可以看出在3.5 s后雖然受到多次波的干擾,且在5 s以后能量團橫向較為分散,但FCOS方法自動拾取的疊加速度與人工拾取的疊加速度經插值處理后的曲線基本重合.而傳統的CNN方法得到的速度曲線在3.5~4.5 s內波動較大,拾取結果明顯偏離人工拾取速度值.圖10c展示了動校正前的CMP2240道集圖像,從中可以看出該道集淺層反射波時距曲線成像較為清晰,在深層區間(5 s以后)未見明顯的反射雙曲線.分別對兩種方法的拾取結果進行動校正,采用FCOS網絡模型自動拾取的疊加速度的動校正的結果如圖10e所示,從圖中可知FCOS方法拾取的疊加速度動校正結果的主要反射同相軸拉平程度與人工拾取速度動校正結果(圖10f)相一致,這進一步展現了本文方法的穩健性.圖10d展示了傳統CNN方法得到的疊加速度的動校正結果,在3.7 s處該方法受低速值的影響錯誤的拉平了道集中的時距曲線,而在4.9 s處該方法又受低速值的影響,導致同相軸隨偏移距增大出現上翹現象.
對第2560測線上的CMP道集進行測試,然后將應用兩種方法得到的疊加速度場與人工拾取速度場進行對比.總體上看基于FCOS方法拾取的速度場(圖11c)與人工拾取速度場(圖11a)在構造上基本一致,且通過本文方法得到的速度場在橫向上速度走勢更加平穩;而傳統CNN方法得到的速度場(圖11b)在4.5 s以后速度值偏小,且在橫向分布上較為散亂,未出現明顯的速度分界面.為了進一步展現結果的準確性,本文展示了采用FCOS方法所得到的第2560測線上局部疊加剖面(圖12c)與和人工拾取疊加剖面(圖12a)的對比,從圖中可以看出FCOS方法得到的疊加剖面與人工拾取結果非常近似;而傳統CNN方法得到的局部疊加剖面(圖12b)與本文方法相比,其在3.5 s后由于受多次波能量團的影響導致拾取的速度值偏低,在地震剖面上出現多次波能量聚焦效應,同相軸更為清晰(如紅色框所示).
然后,采用中國西部某三維探區的信噪比較低的CMP道集數據進一步測試本文方法.該探區偏移距展布范圍為0~7 km,數據的時間總長度8 s,采樣間隔為2 ms.從中等間隔抽取若干條測線,并從每條測線上等間距抽取CMP道集,共獲得包含1000張速度譜圖像的數據集,進而采用在上述實際探區中所訓練模型來測試本文方法的泛化性能.由于該探區信噪比低,在疊前道集中未見明顯的反射波時距曲線,本文只展示出傳統CNN方法與本文方法得到的預測結果與人工拾取結果的對比(圖13).由圖中可以看出該探區數據質量不高,速度譜上的能量團聚焦特性較差.傳統CNN方法僅拾取到了0~3 s區間內的疊加速度(圖13a),且在1.1 s處和2.0 s處拾取到部分高速異常值,在3~8 s區間范圍內由于速度譜能量團較為分散,傳統CNN方法未能自動拾取.圖13b展示了僅使用FCOS方法(圖中黃線)的拾取結果,該方法僅能拾取到0~4 s區間內的疊加速度,由于其不滿足時間域全局的拾取要求,本文在FCOS網絡的基礎上加入一個基于DNN的線性回歸模型,即通過學習0~4 s區間內的疊加速度的線性趨勢來完成對4~8 s區間內的疊加速度的預測,最終的預測結果如圖13b(綠線+黃線)所示.由圖可知在加入線性歸回模型后本文算法的輸出結果與人工拾取結果基本相符.
圖14展示了人工拾取速度場(圖14a)、傳統CNN方法拾取的速度場(圖14b)和本文方法拾取的速度場(圖14c)的比較.受信噪比較低的影響,傳統CNN方法只能拾取到0~3 s區間的速度場,且在部分道存在低速或高速速度異常導致橫向連續性較差,在3.0 s以后的速度相較人工拾取速度場中的速度值普遍偏低.而本文方法拾取的速度場在速度變化趨勢上與人工拾取速度場相一致,但由于應用本文方法拾取速度場并未充分考慮道間相似性,拾取結果在橫向連續性上相較人工拾取速度場較差,在速度分界面處的速度值較為發散.對上述三種方法拾取的道集進行動校正和疊加處理后得到疊加剖面.總體來看,本文方法的疊加剖面(圖15c)與人工拾取結果(圖15a)相近;在紅色框所示位置使用本文方法得到的同相軸相較傳統CNN方法(圖15b)表現更為連續,這進一步檢驗了本文拾取結果的準確性.
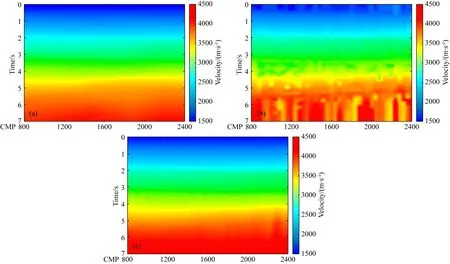
圖11 實際探區速度場(a) 人工方法拾取的速度場;(b) 傳統CNN方法自動拾取的速度場;(c) 本文方法自動拾取的速度場.Fig.11 The actual velocity field in the exploration area(a) The velocity field picked up by manual method;(b) Velocity field automatically picked up by traditional CNN method;(c) The velocity field automatically picked by the method in this paper.
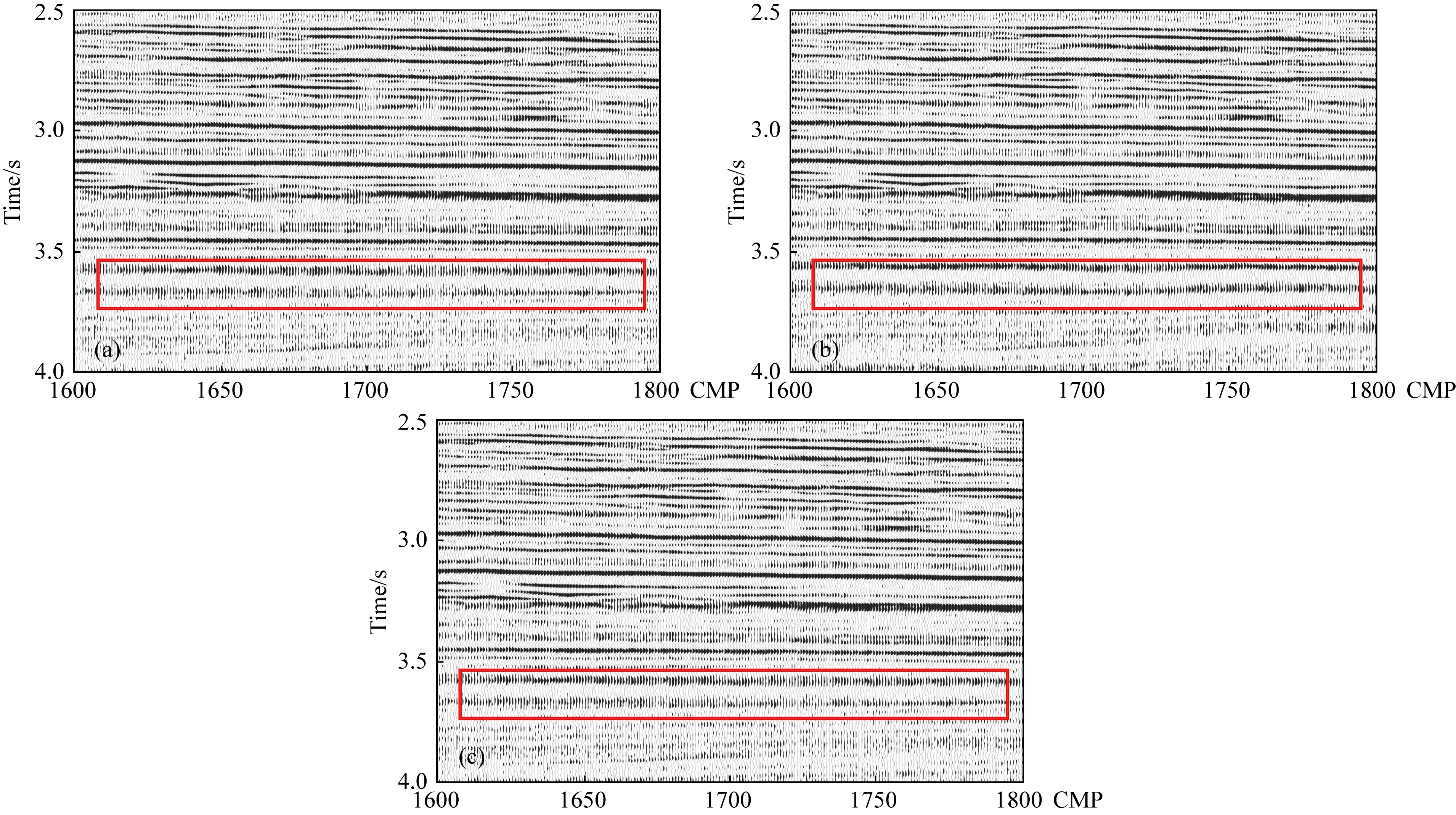
圖12 實際地震資料疊加剖面(a) 人工方法拾取的速度場疊加;(b) 傳統CNN方法自動拾取的速度場疊加;(c) 本文方法自動拾取的速度場疊加.Fig.12 Stacked sections ofactual seismic data(a) The Stacked section of velocity field picked up by manual method;(b) The Stacked section of velocity field picked up by traditional CNN method;(c) The Stacked section of velocity field picked up by the method in this paper.
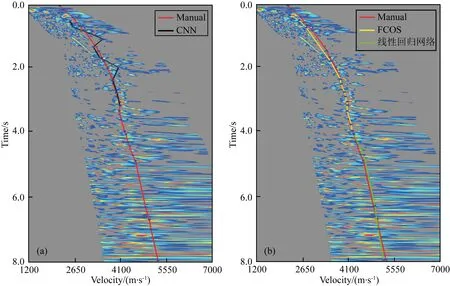
圖13 實際數據速度曲線 (a) 傳統CNN方法拾取的速度曲線;(b) 本文方法拾取的速度曲線.Fig.13 Velocity curve of actual data(a) Velocity curve picked up by traditional CNN method;(b) Velocity curves picked up by the method in this paper.
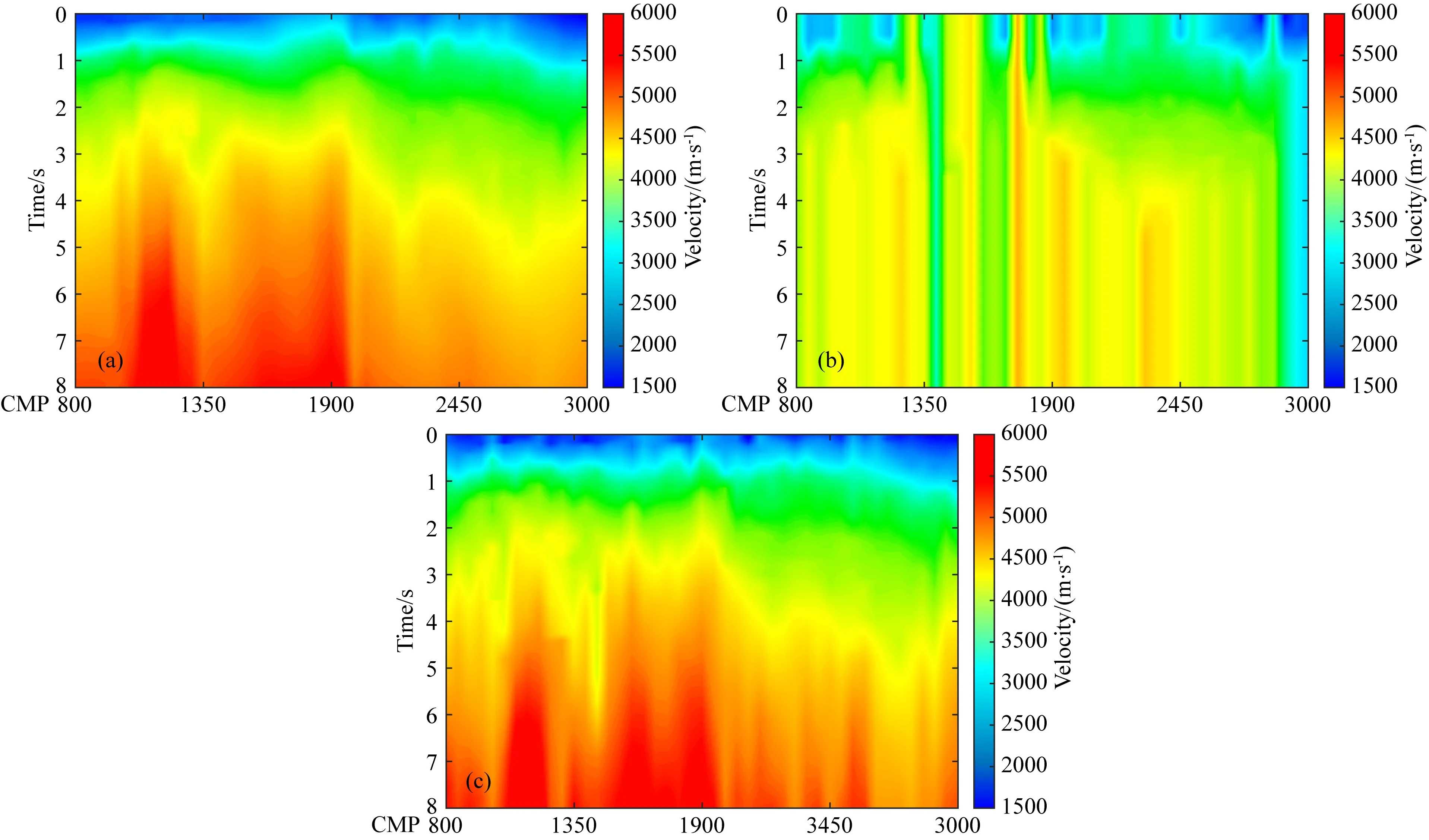
圖14 拾取的速度場與真實速度場比較(a) 人工方法拾取的速度場;(b) 傳統CNN方法自動拾取的速度場;(c) 本文方法自動拾取的速度場.Fig.14 The actual velocity field in the exploration area(a) The velocity field picked up by manual method;(b) Velocity field automatically picked up by traditional CNN method;(c) The velocity field automatically picked by the method in this paper.
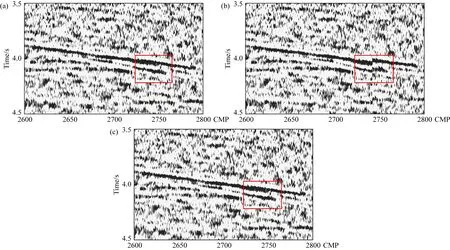
圖15 實際地震資料疊加剖面(a) 人工方法拾取的速度場疊加;(b) 傳統CNN方法自動拾取的速度場疊加;(c) 本文方法自動拾取的速度場疊加.Fig.15 Stacked sections of actual seismic data(a) The Stacked section of velocity field picked up by manual method;(b) The Stacked section of velocity field picked up by traditional CNN method;(c) The Stacked section of velocity field picked up by the method in this paper.
3 結論
本文對FCOS目標檢測模型進行了優化,分別采用模型數據集和實際工區數據集對該網絡模型進行測試,并與傳統CNN方法與人工拾取方法得到的結果做對比來展示本文算法的應用效果.通過對實驗結果做分析得到以下結論:
(1) 優化后的FCOS模型能夠較為精準的實現速度譜中能量團的定位與識別,從而使速度拾取結果具有更高的準確率.針對低信噪比探區中存在能量團聚焦特征較差的情況又加入線性回歸模型來完成對復雜地質體的速度拾取.
(2) 本文設計的網絡模型能夠較為快速的拾取疊加速度,預測10000張速度譜圖片僅需耗時30 min.預測過程不需要任何人工干預,其自動化程度及準確度較高,為解決地震資料速度譜自動拾取問題提供了一種新的方案.
由于本文在進行研究時所用數據集數據量比較少,一般情況下目標檢測數據集圖片的數據量都在幾萬張以上.在實際應用中,可以通過增加數據量重新訓練網絡模型,使其應用于疊加速度拾取時具有更高的精度.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
