“人-機-環境”系統下智能花椒采摘機設計研究
2022-12-07 22:15:38史志遠靳雨欣鄭楊碩冉秋藝
設計 2022年21期
史志遠 靳雨欣 鄭楊碩 冉秋藝
摘要:為解決現有花椒采摘機在適應性上存在缺陷、椒農接受度低的問題。基于“人-機-環境”系統理論,根據現有農機技術構建智能采摘機功能模型,并分析影響采摘機設計的“人”與“環境”因素,針對性地進行設計創新。通過分析結果準確設計采摘機的采摘方式、尺寸造型、交互方式、運輸動力系統,使采摘自動化程度、效率品質、易用性、貼合環境程度有明顯提升,滿足椒農使用需求。該設計方法也為提升農機裝備研發應用水平,進而全面推動鄉村振興提供借鑒與啟示。
關鍵詞:“人-機-環境”系統理論 花椒 智能農機 采摘機設計 鄉村振興
中圖分類號:TB472 文獻標識碼:A文章編號:1003-0069(2022)11-0150-04
Abstract:In order to solve the problems that the existing Zanthoxylum bungeanum Maxim pickers have defects in adaptability and low acceptance of farmers. Based on the "man-machine-environment" system theory. According to the existing agricultural machinery technology,the intelligent picking machine function model is constructed,and the "man" and "environmental" factors that affect the design of the picking machine are analyzed,and the design innovation is carried out in a targeted manner. Accurately design the picking method,size and shape,interaction method,and transportation power system of the picking machine according to the analysis results. so that the degree of picking automation,efficiency,quality,ease of use,and fit for the environment have been significantly,improved to meet the needs of farmers. This design method also provides reference and inspiration for improving the level of research and development and application of agricultural machinery and equipment,and then comprehensively promoting rural revitalization.
Keywords:“Man-Machine-Environment” system theory Zanthoxylum bungeanum Maxim Intelligent agricultural Machinery design of picking machine Rural vitalization
引言
花椒是集油料、香料、藥用于一體的經濟植物,有“五寶樹”之稱[1]。隨著火鍋及眾多川菜品牌的流行,花椒作為主要調料,其市場需求與種植產業不斷增大。目前花椒基本靠手工采摘,該采摘方式的眾多弊端成為制約花椒種植產業的主要瓶頸。得益于農業機械研究的發展,市面上也出現各類手持采摘機、智能采摘設備,但由于忽視“人-機-環境”的關系,采摘機在適應性上存在缺陷,導致椒農對采摘機的接受度普遍不高。在相關學者對花椒采摘機的研究中,李凱欣[2]、劉蒙蒙[3]對花椒采摘及控制系統、采摘機器人及關鍵技術進行設計,張永梅[4]、楊萍[5]分析花椒果實的自動識別技術與可行性,使其能夠精準識別、定位花椒果實的母枝并準確計算出采摘點。以上學者研究的重點主要集中在采摘機技術實現上,但缺乏使用者、環境等限定性因素的考慮。本文以“中國花椒之鄉”漢源縣漢源花椒為例,基于現有花椒采摘智能識別、農機自走系統等技術,以“人-機-環境”系統理論為指導,從“人”“機”“環境”三個維度進行分析并設計,使花椒采摘更加智能化、易接受化,進而提高花椒采收效率。
一、設計背景
漢源花椒,古稱黎椒,在漢源縣已有2100多年的栽培歷史,因其果色紅潤,粒大油重、香氣濃郁、麻味醇厚,深受消費者喜愛,位居全國花椒銷售之冠。漢源縣位于四川西南部,其日照、濕度、溫度、土壤、海拔均適宜花椒生長。漢源花椒產量極大,數字花椒基地已達到5萬畝,以2021年漢源花椒統計量為例,其預計產量已達到4000萬余公斤,預計產值高達9.8億元,品牌價值高達49.65億元。
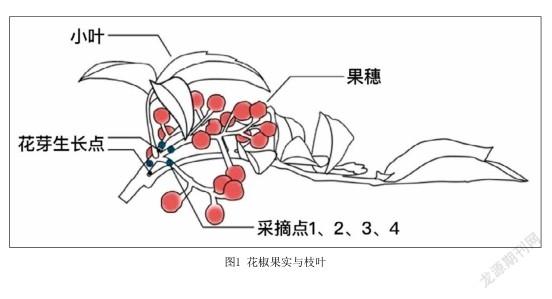
花椒種植屬于勞動密集型產業,目前漢源花椒產業采摘機械化水平較低,且漢源花椒的特性決定了其手工采摘難度大、效率低:(1)花椒樹身布滿皮刺,葉片邊緣亦有細小鋸齒,椒農采摘時極易被刮傷。(2)花椒果穗為一簇,緊挨著小葉與花芽,如圖1所示的4個部位均可以作為采摘點。花椒采摘需盡量保證花椒穗的完整性,不能連枝帶果地掐摘,以免將花芽一并摘下,影響來年結果。在掐摘過程中指肚易被葉片邊緣的鋸齒及葉柄小刺扎破,指甲縫也易產生刺痛感。(3)花椒果表皮有凸起油腺點,碰破油腺會導致花椒曬干后顏色發黑,成色降低。(4)花椒對采摘時間要求十分嚴格,采摘期僅有40余天[6],且早摘香氣不明顯,晚摘果實開裂脫落,短時間內需要大量勞動力。當前農村青壯年較少,勞動力短缺,雇傭外地工人費用較高,采摘一公斤鮮花椒成本高達5-6塊,人力采摘成本極高,導致經常出現增產不增收的情況。市面上常用的花椒采摘機盡管能夠提高采摘效率,但其暴力式的采摘方式嚴重破壞花椒品質,也影響了花椒來年發芽結果,這也成為椒農不愿使用該類采摘機的主要原因。
綜上所述,隨著花椒產業的不斷發展,椒農對花椒采摘機械化有著強烈需求,同時也對采摘機有更高的適應性要求。
二、“人-機-環境”系統理論模型
人類社會發展歷史即是人、機、環境相互關聯、相互制約、相互促進的歷史。“人-機-環境”系統是基于以人為本的原則、在產品開發中更多地考慮人與環境的因素,更好地發揮人的能力、提高人的效率[7],實現安全、高效、經濟等目標。“人-機-環境”系統是將三者視為一個整體系統,在研究單個子系統影響因素時探究三者之間的作用與反作用關系,使其形成內部子系統相互影響、關聯的綜合性系統。
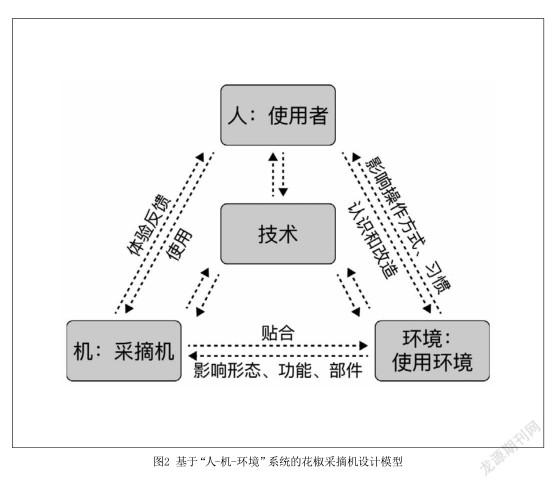
在花椒采摘機“人-機-環境”系統研究分析中,“人”是產品的使用者,即花椒采摘機的最直接接觸者;“機”是人使用并控制的產品,本文指花椒采摘機;“環境”包括有形的自然環境、無形的社會環境和人文環境。花椒采摘機的使用環境是由自然環境、社會環境、人文環境中的一部分構成。花椒采摘機的工作過程可視作由人、采摘機、使用環境組合構成的完整系統,包含3個層次互動關系:(1)人與機,指用戶的正向使用及反向獲取體驗反饋的雙向互動;(2)機與環境,指采摘機的形態、功能、部件與其種植環境、采摘、運輸環境的貼合;(3)人與環境,指用戶與作業環境的相互作用,這一關系體現為用戶對作業環境的認知及操作方式、習慣,如圖2所示。
三、“人-機-環境”系統下花椒采摘機設計
在智能花椒采摘機設計階段,首先根據現有智能農機研究技術,構建完整智能采摘機功能模型。并將采摘機放置于“人-機-環境”系統中,將其融入“人-機”“人-環”的分析中,綜合“技術”條件的影響因素,對花椒采摘機的作業方式、技術原理、結構、尺寸、造型、材質、色彩等方面進行設計研究。
(一)“機”的概念與組成
智能花椒采摘機通過發動機驅動采摘系統對花椒進行采摘,實現花椒采摘功能。除此之外,智能采摘機若要實現集儲存、運輸為一體,仍需涵蓋以下如花椒采摘機儲存、采摘機行走等功能,涉及系統組件主要包括:自動識別系統、履帶行走底盤系統、通訊與控制系統、動力系統、花椒集存系統等。
當前市面花椒采摘形式較多,有高枝剪切式、機械振動式、氣吸、手持槍形式等。漢源椒農常用的是手持槍形電動采摘機,刀頭多為梳齒型、雙面M鋸齒型、勾切型,但在采摘機的采摘系統選擇時,需重點考慮采摘環境因素,減少因收割破壞花椒品質與影響花芽等實際問題。與此同時,花椒機的行走、儲存功能也受限于環境因素。一般情況下,履帶式行走系統是山坡環境下最佳選擇之一,但履帶尺寸、形式多樣,如何設計適用于漢源花椒種植地的履帶需要在環境因素中進行具體討論。同樣,采摘機儲存功能也受限于種植環境的規模與作業時長影響,并進而影響到采摘機的尺寸與造型設計。
(二)“人”因素對花椒采摘機設計影響分析
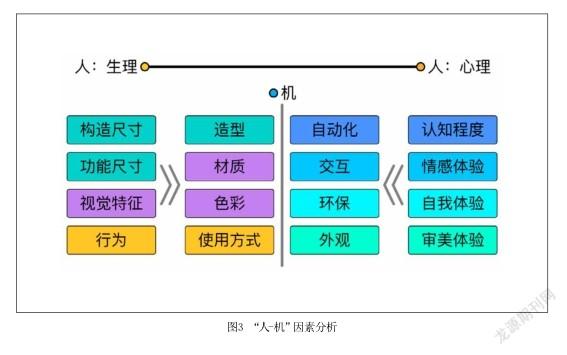
智能花椒采摘機設計應當符合使用者的生理和心理需求,使用者生理需求因素對采摘機的造型、材質、色彩、使用方式設計產生影響;心理需求因素影響采摘機的自動化程度、交互設計、環保特性、造型設計等方面(如圖3)。
在當前漢源花椒產業中,勞動力資源短缺、椒農普遍年齡偏高已成為當前急需解決的問題,且椒農在接受度與認知水平方面也相對欠缺,這也對采摘機在易用性方面提出更高的要求。隨著城市化發展速度加快,農村的年輕一代多數人缺少務農經驗,很難再像祖輩一樣從事“累苦”農活。未來人才回流農村形成農民職業化需要借助智能農械設備,讓用戶如使用電腦、手機般控制設備,進行農業工作。[8]因此,大規模采摘機械化已然成為花椒種植產業發展的必然趨勢,同時椒農在采摘機的功能屬性與交互體驗方面需要更多的關注與優化。
在人機交互方面,椒農對采摘機的控制可通過交互屏幕完成,其中包含:(1)對行走系統與采摘系統的控制。(2)借助可視化地圖選擇采摘區域,實現多機器協同合作進行采摘。(3)使用面板關聯移動終端,當集存箱滿或發生故障時及時向椒農的移動終端發送提醒,以便椒農快速響應并處理,減少因機器故障帶來的實際損失,提升椒農對采摘機的掌控感。
在造型設計方面,采摘機多以產品功能提示作用為主,旨在輔助采摘機功能更好地發揮,用戶更易掌握使用方法。花椒采摘機機身材質由于環境復雜,采用不銹鋼金屬材料并噴涂防腐防銹油漆,使采摘機具有更耐腐蝕性與強度。在采摘機色彩選擇上,結合使用環境的因素,機械臂與主體色彩選擇視覺沖擊較強的橙色,便于用戶清晰觀察采摘機所處位置。機械臂部分部件采用與橙色形成對比更加豐富的銀灰色,部件分色噴涂并組裝,使產品整體具備更強層次感與整體質感。
(三)“環境”因素對花椒采摘機設計影響分析
“人”“機”兩者均處于“環境”因素中,“機”受“環境”因素影響較大,直接決定采摘機的正常運作以及采摘效率。“環境”因素對采摘機造型、材質、色彩、技術有著極大的影響(如圖4)。通過對漢源地區花椒種植地調研,從有形與無形兩個方面對“環境”因素進行分析。智能花椒采摘機主要受限于有形環境因素影響,即:采摘環境、運輸環境、與種植環境,在下文中會進行詳細的分析與設計。而無形環境中則是更多指導、賦能“機”的設計。花椒作為高附加值農產品,在不與糧食作物爭土地的同時充分能夠利用荒山并獲得較高的經濟回報,符合我國生態環境保護、農業綜合開發、綠色產業等發展戰略。2022年中央一號文件指出長期穩定支持丘陵山區小型機械、智能機械研發制造,并重點支持履帶式作業[9]。同時農業機械發展進入第三代信息化技術體系,這個階段農機創新體系的核心思維方式就是把農機轉變為以信息技術為核心的高科技智能農業裝備[8],政策的支持不斷推動農業機械自動化程度、行走系統及控制系統的升級與發展。
1.種植環境分析與設計
漢源花椒屬于紅花椒類,由于紅花椒種植特性,種植地一般選在背風、向陽山地坡上,以成片造林或林糧間種植。花椒樹每株之間留有固定株距,便于苗木生長、椒農管理采摘,株距一般為3000mm×4000mm或2000mm×2000mm。漢源花椒種植間距多為2000mm×2000mm。
針對種植環境特點,對采摘機身尺寸及底盤進行設計。花椒采摘機機身尺寸(長×寬×高)設計為1200mm×800mm×700mm,機械臂伸直長度為1500mm,采摘高度范圍為500mm-2200mm,采摘最大半徑為3000mm。采摘機底盤采用倒梯形履帶底盤,使采摘機能夠適應更加復雜的地形,并具有通過性良好、轉彎半徑小、穩定性優良、爬坡能力強、可變速等優點。履帶單側外形尺寸(長×寬×高)設計為1200mm×150mm×280mm,履帶軌距為550mm,轉彎半徑小于1500mm,在硬質與松軟的路面環境下,底盤的跑偏率分別是3.45%和0.78%,可以通過25°的斜坡,穩定性和爬坡能力優良[10]。履帶系統由履帶、驅動輪、驅動電機、拖帶輪、緊張裝置、車架組成,實現加減速、直行、轉彎等功能。履帶底盤的行走速度設計為3個檔位,從而滿足行走、爬坡、采摘等作業要求,1、2檔用于作業,3檔用于行走。
行走系統采用以嵌入式PC處理器為核心,結合IOT技術和Linuxi嵌入式系統,搭載RFID、視覺傳感器、VZ-XJGY-1300G雙目相機以Eye-in-hand的方式水平放置于機身前端、GPS衛星導航系統,通過無線網、局域網、互聯網等進行傳輸網絡數據[11]。線路規劃采用多級PID沿線控制、動態PID沿邊控制和BFS算法以及基于有限狀態機的目標點導航算法完成基于柵格法的全路徑規劃[12]。
2.采摘環境分析與設計
花椒樹的頂端優勢和枝條垂直優勢較強。在花椒種植過程中,為方便椒農采摘,貼近地面的枝條與過長枝條將會被修剪到合適長度,兩樹之間通常留出一人能夠通過的寬度。根據人機工程學[13]中百分位99的最大肩寬為486mm,計算為500mm,在減去500mm后花椒水平生長半徑為1500mm。果穗生長垂直區間大致為500mm-2000mm,水平生長直徑在3000mm內,枝條的生長情況影響采摘機末端執行器活動范圍的設計。花椒果柄為0.5~0.9mm,且位于果實與小葉中間,采摘點范圍有限,影響末端執行器的形態、大小、切斷方式。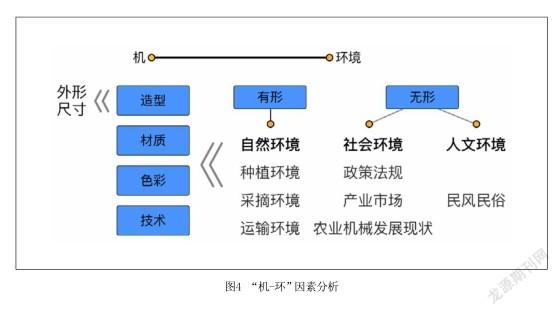
采摘系統由機械臂與末端執行器組成:(1)機械臂材料選擇變壁厚的碳纖維增強環氧復合材料,使機械臂輕量化,與等壁厚的鋁合金機械臂相比,重量降低了90.9%[14]。機械臂的控制算法使用模糊算法和RBFNN算法結合的方法,使機械臂能適應復雜的采摘環境[2]。(2)末端執行器由兩個夾持裝置和四個切斷裝置組成,在小臂滑軌上自由變換位置與角度,結合廣角彩色攝像頭以Eye-to-hand的方法分別放在夾持和切斷裝置上。攝像機識別花椒果穗母枝采用Otsu與K-means聚類算法,再結合圖像相減法,在圖像中得出采摘點坐標后,根據三維世界坐標與圖像坐標的轉換定位采摘點的三維世界坐標,從而控制末端執行器進行采摘,如圖5所示[5]。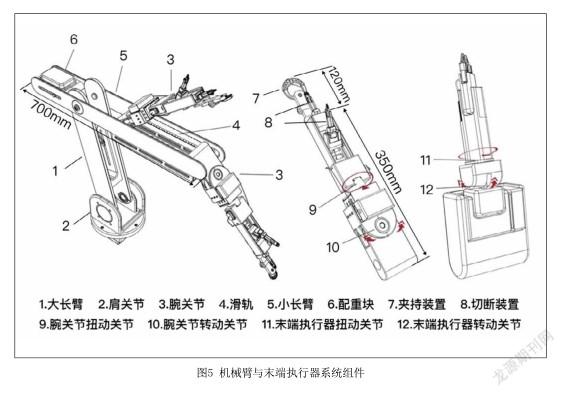
機械臂肩關節的尺寸(長×寬×高)為140mm×140mm×150mm,大長臂長500mm,小長臂長700mm,腕關節長350mm,夾持裝置長120mm,切斷裝置長100mm,夾子尺寸(長×寬×高)為25mm×50mm×12mm,剪刀頭尺寸(長×寬×高)為10mm×20mm×5mm。夾持裝置頂端由兩半圓夾組成,在采摘過程中將切斷裝置附近的樹枝夾住,防止樹枝晃動,方便切斷裝置采摘,夾持力設定為3N。切斷裝置的剪刀由刀頭、橡膠墊組成,在采摘時橡膠墊起到防滑的作用,輔助刀頭切段果穗母枝,切斷力設定為5N。
兩個腕關節可以在小長臂上350mm的軌道上自由滑動,末端執行器與腕關節都設有轉動關節和扭動關節,可用來調整末端執行器的空間姿態。轉動關節的步進電機選用藤尺公司的D2BLD75-12A-30S型號,扭動關節選用D0BLD40-12A-30S型電機[3]。腕關節轉動帶動夾持裝置與切斷裝置傾斜、旋轉,夾住枝條,進行采摘,花椒垂直掉落進下方的收集箱。
在采摘機工作時長需求方面,動力系統在大面積采摘環境中應具備較強的續航能力。動力系統使用柴油發動機,標定功率為17kW,轉速為2200/rpm,動力底盤主要由履帶底盤、配重塊、液壓系統、遙控控制系統、柴油機、變速箱、離合器等部件組成。動力通過V帶從柴油發動機經過離合器傳輸變速箱輸入軸,并傳遞給后動力輸出軸和提升液壓泵,提升和輸出作業機具的動力,履帶底盤的主要技術參數如表1所示[15]。
3.運輸環境分析與設計
運輸環境不僅包括采摘機自身的運輸,而且也包括花椒的運輸。在農村面包車的使用頻率最高,可作為主要運輸工具。以五菱榮光為例,后備箱進門寬度為1200mm,高度為1270mm,縱深為370mm-1580mm[16]。花椒摘下后應該集中堆放晾曬或放進烘房中烘干,在此過程中花椒果實不宜經過多次拿放,以免油腺破裂。采摘機機身的設計應該同時考慮運輸與種植環境,在滿足正常使用的情況下方便運輸。
針對花椒運輸環境,花椒收集箱采用抽屜式設計,尺寸(長×寬×高)為450mm×600mm×300mm,采摘機工作前用戶需要將防雨罩抽出,機身與底座由回轉機構連接可以360°旋轉,使收集箱與采摘裝置一直出于上下垂直狀態,花椒果穗垂直掉落進收集箱內。在收集箱滿后,用戶可以直接取出收集箱進行傾倒清理,避免過多觸碰果實。
(四)“人-機-環境”影響下智能花椒采摘機設計
將“技術”條件分別融入“人”與“環境”因素,作用于采摘機的設計,形成最終智能花椒采摘機設計方案。采摘機由自動識別系統、履帶行走底盤系統、通訊與控制系統、末端執行器系統、動力系統、花椒集存系統等組成。新型行走系統和采摘系統設計,能夠減少操作者的勞動強度;整機操控可通過智能屏幕完成,并且支持智能屏幕或移動終端選擇作業區域、接收提示,更加符合使用者需求;造型設計簡潔,結合使用環境與用戶視覺特性,采用高強度的鋼板與防銹防腐工藝處理,選擇橙色與黑色為主體顏色;考慮山地、坡地的種植環境,底盤設計選擇倒梯形底盤,穩定性和爬坡能力優良;末端執行器由兩個夾持裝置與四個切斷裝置組成,并且均帶有攝像頭,在采摘過程中能夠精準識別果穗與采摘點,腕關節與末端執行器均帶有轉動關節與扭動關節,用于調整末端執行器的空間姿態,符合末端執行器的運動精度要求;花椒收集箱采用抽屜式;發動機采用柴油發動機,保證充足的動力,如圖6所示。
結語
基于“人-機-環境”系統理論模型,對“人-機”“環境-機”進行了深入分析,根據“人”與“環境”兩個因素的影響對采摘機進行設計創新,使花椒采摘自動化,采摘效率、采摘精準度大幅提升。新型采摘機為當前花椒基本靠手工采摘、勞動力短缺、采摘成本高等問題提供有效解決方案,使花椒產業在增產的同時實現增收,更加滿足椒農使用需求。結果表明“人-機-環境”系統理論在農機設計時有著良好的指導作用,使花椒采摘機的設計既能符合用戶需求,又能適應作業環境。該類設計方法對我國多樣化的地貌特征所需的多樣化農機設計有著一定指導意義,也為農業生產、現代農業園區的推進,特別是山區生態農業帶來積極的影響,在一定程度上推動鄉村振興。
基金項目:本論文得到中央高校基本科研業務費專項資金資助(項目批準號:2021VI040)。
參考文獻
[1]馬君義,張繼,馮洋洋,黃玉龍,李佳佳,邢潤苗,魏相龍.甘肅花椒產業發展現狀及對策分析[J].安徽農業科學,2011,39(16):10055-10057+10091.
[2]李凱欣. 花椒采摘機器人控制系統研究與設計[D].蘭州理工大學,2020.
[3]劉蒙蒙.花椒采摘機器人的機械系統方案設計及其關鍵技術研究[D].蘭州理工大學,2019.
[4]張永梅,李菊霞.成熟花椒果實的自動識別技術研究[J].農業技術與裝備,2019(01):4-6.
[5]楊萍,郭志成.花椒采摘機器人視覺識別與定位求解[J].河北農業大學學報,2020,43(03):121-129.
[6]侯維,廉通,彭小芮.多舉措推動縣域特色農產品蓬勃發展——以漢源花椒為例[J].鄉村振興,2022(01):54-55.
[7]陳信,袁修干.人機環境系統工程總論[M].北京:北京航空航天大學出版社,1996.
[8]孫凝暉,張玉成,石晶林.構建我國第三代農機的創新體系[J].中國科學院院刊,2020,35(02):154-165.
[9]中共中央統一戰線工作部網站.2022年中央一號文件公布 提出全面推進鄉村振興重點工作.[EB/OL].(2022,02,23)[2022,03,01]http://www.zytzb.gov.cn/szyw/367597.jhtml.
[10]劉妤,謝鈮,張拓.小型山地履帶底盤設計與仿真分析[J].機械設計,2020,37(06):115-122.
[11]殷玥.基于嵌入式PC和物聯網的無人駕駛拖拉機研究[J].農機化研究,2018,40(01):247-251.
[12]張馳洲.基于慣性導航的掃地機器人關鍵技術研究與實現[D].南昌大學,2020.
[13]丁玉蘭.人機工程學(第5版)[M].北京:北京理工大學出版社,2017.
[14]隋顯航,郭輝,李顯華,林鳳森,李光友.碳纖維增強環氧復合材料機械臂結構設計與性能研究[J].化工新型材料,2020,48(07):235-237+243.
[15]柳國光,楊自棟,張加清,王濤.筍用毛竹林履帶式動力底盤研制[J].中國農機化學報,2019,40(09):131-135.
[16]孫虎,周潔,雷顏瑞.基于人機環境系統的噴流式挖藕機改良設計[J].包裝工程,2019,40(22):130-135.
[17]厲鈺琪,鞏淼森.復雜駕駛任務下基于多資源理論的汽車人機交互設計方法[J].設計,2022,35(10):24-27.
[18]汪瑞,沈偉豪,宋吉明*.基于公共利益的純機械拉線式水果采摘器設計[J].設計,2022,35(11):136-139.
[19]井忠祥,漆磊,楊承龍.月球營地機械爪設計[J].設計,2021,34(12)125-127.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
