抽水蓄能機(jī)組發(fā)電電動(dòng)機(jī)轉(zhuǎn)子端部運(yùn)行狀態(tài)在線監(jiān)測(cè)系統(tǒng)研發(fā)
2022-12-13 10:03:14尹和松李淑鈺
大電機(jī)技術(shù) 2022年6期
孫 凱,尹和松,陳 爽,李淑鈺
(1.哈爾濱電機(jī)廠有限責(zé)任公司,哈爾濱 150040;2.黑龍江牡丹江抽水蓄能有限公司,黑龍江 牡丹江 157000)
0 前言
抽水蓄能機(jī)組與常規(guī)水電機(jī)組相比,其發(fā)電電動(dòng)機(jī)具有發(fā)電機(jī)/電動(dòng)機(jī)雙工況運(yùn)行、轉(zhuǎn)速高、雙向旋轉(zhuǎn)、頻繁啟停等特點(diǎn),這為該類機(jī)組帶來(lái)了一些新的運(yùn)行安全問(wèn)題[1]。發(fā)電電動(dòng)機(jī)轉(zhuǎn)子端部的各種部件隨著電機(jī)轉(zhuǎn)子高速旋轉(zhuǎn),且長(zhǎng)期運(yùn)行在電、熱和機(jī)械應(yīng)力的環(huán)境下,會(huì)發(fā)生各種機(jī)械故障,從而對(duì)機(jī)組運(yùn)行帶來(lái)安全隱患。為了保證機(jī)組運(yùn)行安全,根據(jù)電機(jī)運(yùn)行中發(fā)生的故障,對(duì)發(fā)電電動(dòng)機(jī)的在線監(jiān)測(cè)系統(tǒng)增加一些新的監(jiān)測(cè)項(xiàng)目就顯得十分必要[2]。
本文提出了一種新型抽水蓄能機(jī)組發(fā)電電動(dòng)機(jī)轉(zhuǎn)子端部運(yùn)行狀態(tài)的在線監(jiān)測(cè)系統(tǒng)。通過(guò)在線監(jiān)測(cè)抽水蓄能機(jī)組的電機(jī)轉(zhuǎn)子端部某些關(guān)鍵部件的運(yùn)行狀態(tài),實(shí)現(xiàn)對(duì)這些關(guān)鍵部件各種機(jī)械故障與缺陷的早期發(fā)現(xiàn)、早期預(yù)警及早期處理,保障機(jī)組運(yùn)行安全,避免故障對(duì)機(jī)組安全運(yùn)行產(chǎn)生嚴(yán)重的隱患。
1 在線監(jiān)測(cè)系統(tǒng)工作原理
電機(jī)轉(zhuǎn)子勵(lì)磁繞組是實(shí)現(xiàn)機(jī)電能量轉(zhuǎn)換的重要部件,磁極線圈之間用極間連接線和磁極引出線相連接,以構(gòu)成勵(lì)磁繞組,磁極阻尼條與阻尼環(huán)通過(guò)阻尼環(huán)連接片構(gòu)成電機(jī)阻尼繞組[3]。電機(jī)的磁極引出線、極間連接線、阻尼環(huán)連接片等部件均位于電機(jī)轉(zhuǎn)子上端部,隨著電機(jī)轉(zhuǎn)子高速旋轉(zhuǎn),并且長(zhǎng)期運(yùn)行在電、熱和機(jī)械應(yīng)力的環(huán)境下。水輪發(fā)電機(jī)以及抽水蓄能電動(dòng)機(jī)轉(zhuǎn)子繞組是串聯(lián)連接的,其電阻值變化將引起溫度變化,因此通過(guò)溫度與損耗和電阻值的關(guān)系可以判斷是否存在機(jī)械故障問(wèn)題;同理,極間連接線和阻尼環(huán)連接片的溫度變化同樣可以反映電阻值的變化。當(dāng)極間連接線的連接部位出現(xiàn)松動(dòng)或者局部出現(xiàn)裂紋時(shí),其電阻值變大,損耗隨之變大,其溫度會(huì)出現(xiàn)異常波動(dòng)。所以電機(jī)運(yùn)行過(guò)程中,如果能夠監(jiān)測(cè)轉(zhuǎn)子端部的溫度分布情況,則可以早期發(fā)現(xiàn)和預(yù)測(cè)磁極連接線或者阻尼環(huán)連接片的輕微機(jī)械故障[4-5]。另外,根據(jù)磁極線圈的溫度分布情況,也可以早期判斷磁極線圈間絕緣是否存在問(wèn)題。通過(guò)監(jiān)測(cè)電機(jī)轉(zhuǎn)子端部溫度分布情況,可以早期發(fā)現(xiàn)轉(zhuǎn)子機(jī)械故障,避免其進(jìn)一步擴(kuò)大,提高機(jī)組運(yùn)行的安全可靠性。
本文提出的新型抽水蓄能機(jī)組發(fā)電電動(dòng)機(jī)轉(zhuǎn)子端部運(yùn)行狀態(tài)在線監(jiān)測(cè)系統(tǒng)利用紅外輻射測(cè)溫與智能數(shù)字圖像技術(shù),采用非接觸式的紅外熱像儀與高速工業(yè)照相機(jī),把紅外熱像儀與高速工業(yè)照相機(jī)安裝到電機(jī)定子上機(jī)架上,拍攝電機(jī)運(yùn)行過(guò)程中轉(zhuǎn)子端部磁極上部的狀態(tài)。當(dāng)電機(jī)轉(zhuǎn)子旋轉(zhuǎn)時(shí),熱像儀和相機(jī)可以掃描到電機(jī)轉(zhuǎn)子所有磁極的磁極線圈上部、磁極引出線、極間連接線和阻尼環(huán)連接片,這樣就可以監(jiān)測(cè)到所有需要監(jiān)測(cè)部件的溫度與高清圖像,通過(guò)數(shù)字智能化在線監(jiān)測(cè)系統(tǒng)及大數(shù)據(jù)分析軟件實(shí)現(xiàn)電機(jī)端部運(yùn)行狀態(tài)的在線監(jiān)測(cè)[6]。
2 系統(tǒng)構(gòu)成
抽水蓄能機(jī)組發(fā)電電動(dòng)機(jī)轉(zhuǎn)子端部運(yùn)行狀態(tài)在線監(jiān)測(cè)系統(tǒng)由高速紅外熱像儀對(duì)轉(zhuǎn)子端部關(guān)鍵部件的溫度熱圖像進(jìn)行非接觸式拍攝,同時(shí)采用高速工業(yè)相機(jī)對(duì)相同部位進(jìn)行高清拍攝。溫度熱圖像與高清圖像的定位是利用電機(jī)測(cè)速齒盤、轉(zhuǎn)速傳感器和鍵相傳感器獲得的,后通過(guò)計(jì)算機(jī)測(cè)控技術(shù)及大數(shù)據(jù)軟件對(duì)上述圖像進(jìn)行分析,從而對(duì)蓄能機(jī)組發(fā)電電動(dòng)機(jī)轉(zhuǎn)子端部可能的運(yùn)行故障進(jìn)行預(yù)警[7-8]。系統(tǒng)原理框圖如圖1所示。
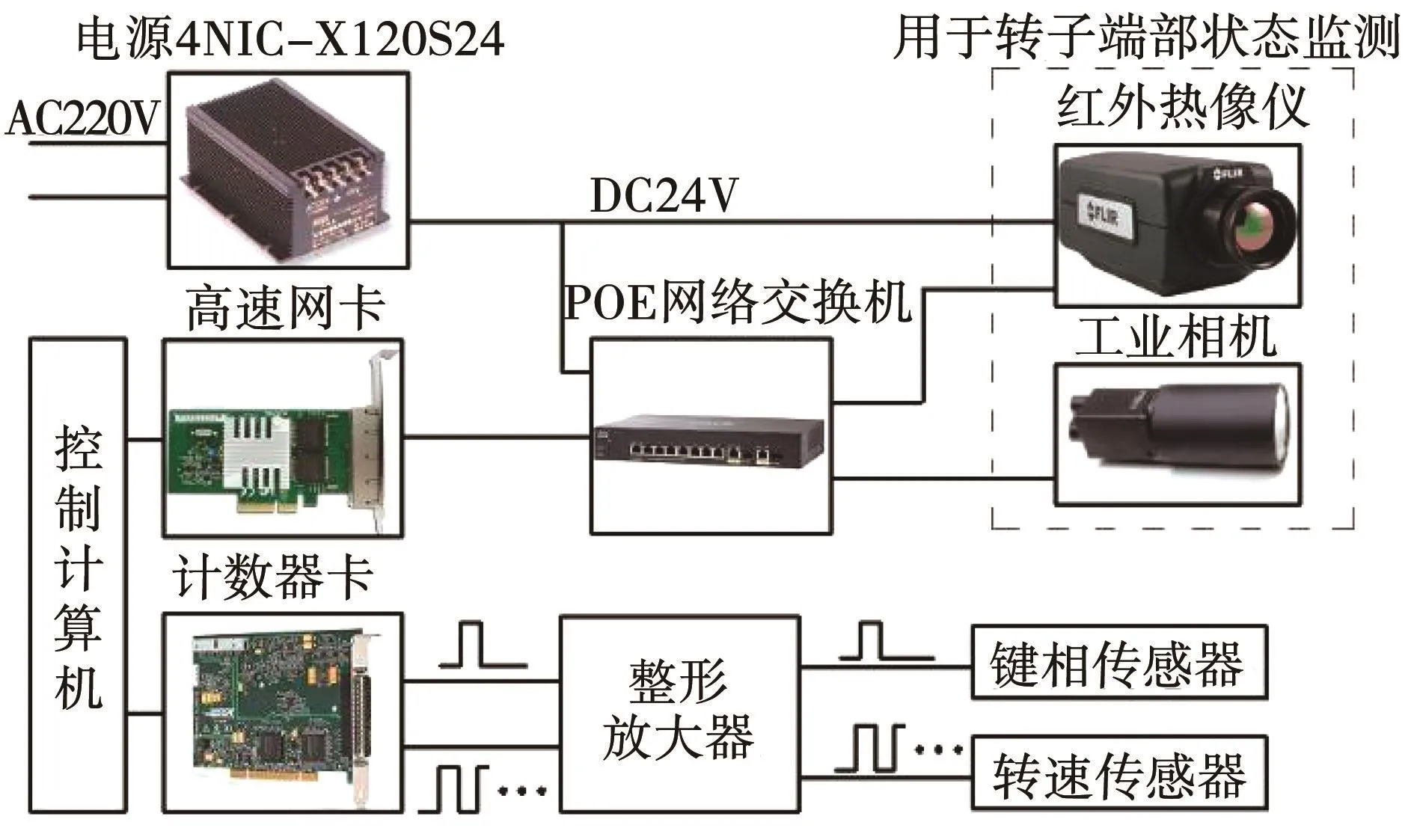
圖1 在線監(jiān)測(cè)系統(tǒng)框圖
2.1 鍵相傳感器和轉(zhuǎn)速傳感器
鍵相傳感器、轉(zhuǎn)速傳感器安裝于電機(jī)定子機(jī)座。在轉(zhuǎn)子大軸表面與某一特定磁極對(duì)應(yīng)的部位,貼一個(gè)信號(hào)標(biāo)志鍵相片,在轉(zhuǎn)子旋轉(zhuǎn)過(guò)程中,當(dāng)轉(zhuǎn)子上的鍵相片旋轉(zhuǎn)至與鍵相傳感器相遇時(shí),鍵相傳感器就會(huì)發(fā)出一個(gè)脈沖信號(hào),這個(gè)信號(hào)稱為鍵相信號(hào)。在電機(jī)轉(zhuǎn)子大軸上安裝一個(gè)與轉(zhuǎn)速傳感器相對(duì)且齒數(shù)為轉(zhuǎn)子磁極數(shù)3倍的測(cè)速齒盤,在電機(jī)轉(zhuǎn)子旋轉(zhuǎn)過(guò)程中,每旋轉(zhuǎn)一圈,轉(zhuǎn)速傳感器就會(huì)發(fā)出與測(cè)速齒盤齒數(shù)等量的轉(zhuǎn)速脈沖信號(hào)。轉(zhuǎn)速脈沖信號(hào)與鍵相信號(hào)共同使用,通過(guò)計(jì)算機(jī)控制技術(shù),可以控制紅外熱像儀與高速工業(yè)相機(jī)采集電機(jī)轉(zhuǎn)子端部任意磁極部位的熱像圖及高清圖像[9]。
2.2 FLIR A6751型紅外熱像儀
在紅外熱像儀拍攝發(fā)電電動(dòng)機(jī)轉(zhuǎn)子端部部件的溫度過(guò)程中,電機(jī)轉(zhuǎn)子以一定轉(zhuǎn)速旋轉(zhuǎn),轉(zhuǎn)子不同的半徑處以不同的線速度運(yùn)動(dòng),電機(jī)磁極外側(cè)的線速度可達(dá)到120m/s以上,所以紅外熱像儀所拍攝測(cè)量的每一點(diǎn)溫度值均為某一段弧線區(qū)域內(nèi)的溫度平均值,這段弧線區(qū)域的長(zhǎng)短與電機(jī)轉(zhuǎn)速及高速熱像儀的積分時(shí)間有關(guān),所以紅外熱像儀的選擇及積分時(shí)間的確定是在線監(jiān)測(cè)系統(tǒng)的關(guān)鍵因素[10]。
FLIR A6751型紅外熱像儀為超晶格制冷長(zhǎng)波熱像儀,在拍攝測(cè)量過(guò)程中,積分時(shí)間可以達(dá)到480ns~20000μs,但是拍攝中使用的具體積分時(shí)間與拍攝畫(huà)面的頻率及拍攝對(duì)象的表面溫度有很大關(guān)系[11]。在監(jiān)測(cè)發(fā)電電動(dòng)機(jī)轉(zhuǎn)子端部部件溫度的過(guò)程中,被測(cè)部件的溫度約為70~160℃,熱像儀的積分時(shí)間約為10~30μs,如果電機(jī)轉(zhuǎn)子端部溫度監(jiān)測(cè)點(diǎn)按照125m/s的線速度旋轉(zhuǎn),熱像儀的積分時(shí)間為30μs,那么一個(gè)溫度采樣點(diǎn)的溫度實(shí)際是一段3.75mm長(zhǎng)的弧線區(qū)域的溫度平均值,由于3.75mm數(shù)值很小,因此將此區(qū)域的溫度平均值作為一點(diǎn)的溫度值是可以被接受的。
2.2.1 紅外熱像儀的安裝方式
在安裝紅外熱像儀時(shí),根據(jù)紅外熱像儀的外形及安裝機(jī)械結(jié)構(gòu),設(shè)計(jì)一個(gè)金屬防護(hù)罩,把熱像儀固定安裝在金屬防護(hù)罩內(nèi),再根據(jù)電機(jī)定子上機(jī)架的機(jī)械結(jié)構(gòu),把紅外熱像儀金屬防護(hù)罩吊裝固定在電機(jī)定子上機(jī)架并對(duì)著轉(zhuǎn)子上端面要監(jiān)測(cè)溫度的部位。紅外熱像儀的鏡頭與需要監(jiān)測(cè)溫度的電機(jī)轉(zhuǎn)子部件的垂直距離需要根據(jù)監(jiān)測(cè)畫(huà)面的視場(chǎng)以及紅外熱像儀鏡頭的焦距進(jìn)行計(jì)算。
2.2.2 紅外熱像儀監(jiān)測(cè)的熱圖像定位
紅外熱像儀在電機(jī)定子圓周空間安裝位置與鍵相傳感器的圓周空間安裝位置相對(duì)固定。熱像儀測(cè)控軟件將電機(jī)鍵相傳感器信號(hào)作為控制紅外熱圖像采集開(kāi)始的零相位信號(hào),把轉(zhuǎn)速傳感器輸出的轉(zhuǎn)速脈沖信號(hào)作為紅外熱圖像采集位置的定位信號(hào)。這樣就可以定位每幅圖像與電機(jī)轉(zhuǎn)子的空間相對(duì)位置,從而測(cè)量出每一個(gè)磁極線圈、阻尼環(huán)連接片、磁極引出線及極間連接線的溫度變化曲線。當(dāng)電機(jī)轉(zhuǎn)子某一磁極的引出線或連接線等部位的溫度發(fā)生突變,則預(yù)示著這一部位有可能發(fā)生裂紋或把合螺絲松動(dòng)等機(jī)械故障,需要對(duì)相同部位的高清圖像做進(jìn)一步分析。如果電機(jī)轉(zhuǎn)子端部某部位的溫度突變特別明顯,而通過(guò)相同部位的高清圖像又發(fā)現(xiàn)不了確切的裂紋等機(jī)械缺陷,則可以懷疑是銅排內(nèi)部發(fā)生斷裂缺陷,此時(shí),為避免故障進(jìn)一步加大而造成嚴(yán)重的運(yùn)行安全事故,可以在發(fā)電電動(dòng)機(jī)運(yùn)行工況轉(zhuǎn)換停機(jī)期間,對(duì)懷疑的部位進(jìn)行無(wú)損探傷檢查。
2.3 TRIO50S型高速工業(yè)相機(jī)
發(fā)電電動(dòng)機(jī)轉(zhuǎn)子以高于400r/min的轉(zhuǎn)速長(zhǎng)期雙向運(yùn)行,機(jī)械結(jié)構(gòu)在運(yùn)行過(guò)程中有可能出現(xiàn)疲勞損傷問(wèn)題,為避免機(jī)械疲勞損傷引發(fā)非正常停機(jī),本文建立了一套轉(zhuǎn)子端部高清圖像監(jiān)測(cè)系統(tǒng)。通過(guò)分析電機(jī)運(yùn)行過(guò)程中拍攝到的電機(jī)轉(zhuǎn)子端部高清圖像,可以發(fā)現(xiàn)重要部位在運(yùn)行過(guò)程中發(fā)生的細(xì)微變化,建立電機(jī)轉(zhuǎn)子端部圖像數(shù)據(jù)庫(kù)。通過(guò)對(duì)溫度數(shù)據(jù)發(fā)生顯著變化的磁極引出線、極間連接線等部件表面圖像進(jìn)行詳細(xì)分析觀察,可達(dá)到對(duì)機(jī)械故障早發(fā)現(xiàn)、早預(yù)防的目的。
TRIO50S型高速工業(yè)相機(jī)是一款具有高分辨率、高速度的工業(yè)級(jí)照相機(jī),其快門速度最快可以達(dá)到1μs,與適當(dāng)?shù)母咚俟庠磁浜希梢耘南赂咚傩D(zhuǎn)的電機(jī)轉(zhuǎn)子端部的高清圖像。這些高清圖像可以與紅外測(cè)溫圖像互為輔助數(shù)據(jù),作為電機(jī)轉(zhuǎn)子運(yùn)行狀態(tài)在線監(jiān)測(cè)分析的重要依據(jù)。
系統(tǒng)監(jiān)控軟件可以把電機(jī)轉(zhuǎn)子端部高清圖像存入監(jiān)控系統(tǒng)數(shù)據(jù)庫(kù),當(dāng)發(fā)電電動(dòng)機(jī)各種運(yùn)行工況下轉(zhuǎn)子端部磁極線圈、磁極引出線、極間連接線以及阻尼環(huán)連接片的各種高清圖像積累的足夠多,可以利用圖像人工智能識(shí)別技術(shù),開(kāi)發(fā)電機(jī)轉(zhuǎn)子端部高清圖像機(jī)械故障自動(dòng)判別軟件,由計(jì)算機(jī)自動(dòng)分析判斷電機(jī)轉(zhuǎn)子高清圖像的機(jī)械故障,這樣可以大大提高監(jiān)測(cè)系統(tǒng)的工作效率及可靠性。
2.3.1 高清工業(yè)相機(jī)的安裝方式
高清工業(yè)相機(jī)的安裝方式與紅外熱像儀的安裝方式類似,將高清工業(yè)相機(jī)固定安裝在金屬防護(hù)罩內(nèi),再吊裝固定在電機(jī)定子上機(jī)架并對(duì)著轉(zhuǎn)子上端面需要監(jiān)測(cè)圖像的部位。高清工業(yè)相機(jī)的鏡頭與需要監(jiān)測(cè)的電機(jī)轉(zhuǎn)子部件的垂直距離需要根據(jù)監(jiān)測(cè)畫(huà)面的視場(chǎng)及鏡頭的焦距進(jìn)行計(jì)算。
2.3.2 高清工業(yè)相機(jī)拍攝的高清圖像定位
采用與紅外熱像儀拍攝的電機(jī)轉(zhuǎn)子端部紅外熱圖像相同的定位方式就可以定位高清工業(yè)相機(jī)拍攝的電機(jī)轉(zhuǎn)子端部每一個(gè)磁極線圈、阻尼環(huán)連接片、磁極引出線和極間連接線的高清圖像。通過(guò)對(duì)電機(jī)轉(zhuǎn)子端部高清圖像進(jìn)行人工分析,并結(jié)合相應(yīng)部位的溫度變化曲線,可以對(duì)電機(jī)轉(zhuǎn)子端部磁極線圈、磁極引出線、極間連接線以及阻尼環(huán)連接片的機(jī)械故障進(jìn)行早期預(yù)警和處理,避免故障繼續(xù)發(fā)展而造成機(jī)組的重大運(yùn)行事故。
3 電站現(xiàn)場(chǎng)試驗(yàn)應(yīng)用
將本文研發(fā)的在線監(jiān)測(cè)系統(tǒng)在某抽水蓄能電站發(fā)電電動(dòng)機(jī)上進(jìn)行了應(yīng)用試驗(yàn),監(jiān)測(cè)效果良好。紅外熱像儀的監(jiān)測(cè)工作界面如圖2所示,電機(jī)轉(zhuǎn)子端部高清圖像如圖3所示。
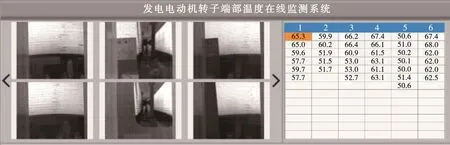
圖2 紅外熱像儀的監(jiān)測(cè)工作界面

圖3 電機(jī)轉(zhuǎn)子端部高清圖像
4 結(jié)論
本文論述了一種用于監(jiān)測(cè)高速旋轉(zhuǎn)的抽水蓄能電站發(fā)電電動(dòng)機(jī)轉(zhuǎn)子端部運(yùn)行狀態(tài)的系統(tǒng),本系統(tǒng)通過(guò)紅外熱像儀與高清工業(yè)照相機(jī)在線獲取電機(jī)轉(zhuǎn)子端部關(guān)鍵部件在高速旋轉(zhuǎn)過(guò)程中的運(yùn)行溫度與高清圖像,利用智能自動(dòng)化測(cè)控技術(shù)與大數(shù)據(jù)分析系統(tǒng)軟件,可以實(shí)現(xiàn)對(duì)抽水蓄能機(jī)組電機(jī)轉(zhuǎn)子端部關(guān)鍵部件機(jī)械故障與缺陷的早期預(yù)警與監(jiān)測(cè)。電站現(xiàn)場(chǎng)運(yùn)行試驗(yàn)結(jié)果表明,該系統(tǒng)運(yùn)行穩(wěn)定,非接觸測(cè)量,對(duì)電機(jī)運(yùn)行不會(huì)帶來(lái)任何安全隱患,溫度數(shù)據(jù)準(zhǔn)確可靠,圖像清晰,對(duì)發(fā)現(xiàn)早期的機(jī)械故障具有明顯作用,對(duì)保障電機(jī)的運(yùn)行安全具有重要作用。
