軌道交通全自動運行系統新增功能研究
2022-12-19 02:22:16王天嬌
運輸經理世界 2022年24期
王天嬌
(江蘇師范大學,江蘇 徐州 221116)
1 全自動運行系統概述
全自動運行系統(Fully Automatic Operation,FAO)是實現列車運行全過程自動化的新一代城市軌道交通系統[1]。截至2021 年12 月31 日,我國已運營、在建及規劃全自動運行系統的城市有28 座,共計85條線路,運營里程達2515.77km,其中已運營線路30條,運營里程為728.46km,在建及規劃里程達1787.31km。全球75%的新建線路及40%的改造線路將采用全自動運行系統,可見全自動運行系統已經成為城市軌道交通建設的主流制式。
國際公共交通協會(UITP)將列車運行的自動化水平劃分為5 級,如表1 所示。其中,全自動運行系統包 含GOA3(DTO)和GOA4(UTO)[2],即 在 正 常 運 營情況下,由自動化設備取代司機,自動駕駛列車在全線運行。與傳統有人駕駛的列車運行控制系統相比,FAO 新增部分功能,從而使列車自動實現喚醒、自檢、出庫、發車、行駛、停靠站、開關車門、折返,結束運營后自動回庫、洗車和休眠等作業任務。

表1 列車運行自動化等級
2 采用全自動運行系統的必要性
中國城市軌道交通協會制定的《中國城市軌道交通智慧城軌發展綱要》中指出:全自動運行系統是城市軌道交通的重點發展方向之一。此外,采用全自動運行技術,不僅能夠提高運營效率,降低運營成本,還能夠提高系統可靠性,保證運營安全[3]。FAO 的技術優勢如下。
2.1 提高地鐵線路運輸能力
采用FAO 的地鐵正線運營間隔最短可達到90s,較現在的技術水平有較大的提高。
2.2 提高系統可靠度
采用先進的自動化設備,能夠有效防止人為誤操作引起的地鐵事故,從而減小事故發生的概率,提高系統的可靠性與安全性。
2.3 靈活運營
不僅擺脫了傳統運營系統對司機的依賴,而且可以根據運輸需求靈活地調整列車的數量及發車間隔,從而提高系統對大客流的應變能力。
2.4 改善列車行駛特性
FAO 可消除人工駕駛中的人為因素,改善列車運行曲線,有利于提高列車運行速度及旅客乘坐列車的舒適度。
2.5 優化人員配置
通過智能調度平臺降低運營人員工作強度,實現一專多能。同時,將司機從重復作業中解放出來,改配多職能隊伍服務乘客。
2.6 節能減排,降低成本
進一步協調列車的協同控制,充分利用再生制動能量,降低系統能耗;也可通過協調列車啟動時間,實現錯峰啟動,降低系統峰值能耗,同時減少運營后期司機人員,降低人員成本[4]。
3 全自動運行系統功能配置
3.1 全自動運行系統運營場景
FAO 包含早間自動上電、列車自動喚醒休眠、自動出入庫、洗車、對位停車、自動發車等正常場景,還包含車門/站臺門狀態丟失等故障場景,以及車輛/站臺/區間火災等應急場景,如圖1 所示[5]。

圖1 全自動運行場景
3.2 全自動運行系統功能
傳統CBTC 系統功能包含臨時限速、自動折返、后退防護、進路及速度防護、定位與測速、車門控制與隔離、停穩檢測、完整性監督等。FAO 系統功能除了包含傳統CBTC 系統全部功能外,還包含喚醒休眠、自動洗車、全自動折返、對位隔離、障礙檢測、車輛遠程監督與控制等功能,全自動運行系統功能如圖2所示。
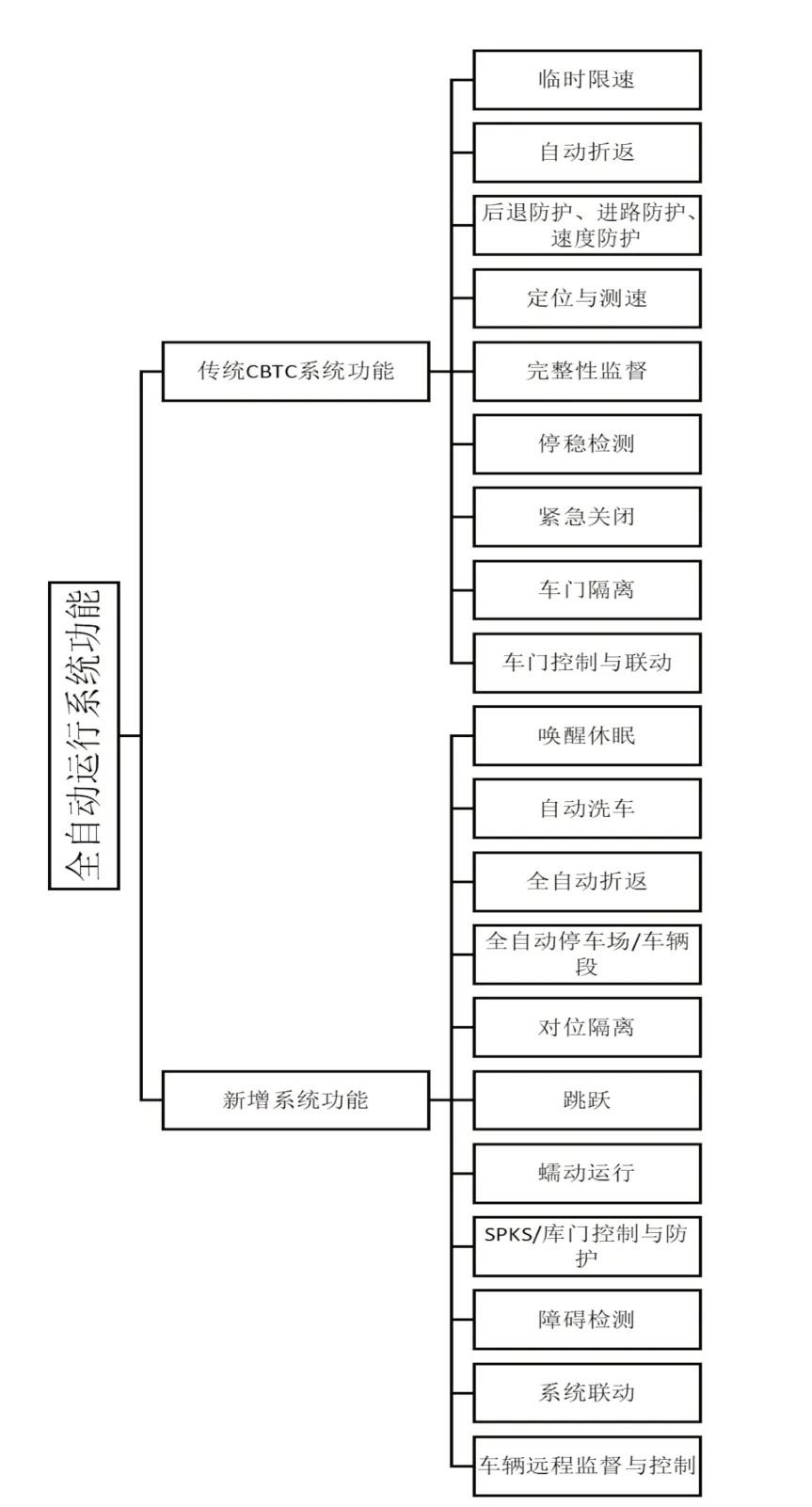
圖2 全自動運行系統功能
全自動運行系統是通過信號、車輛、綜合監控、通信、站臺門等子系統協同聯動控制,從而完成列車運行全過程的全自動控制。下面將簡單介紹各子系統新增功能。
3.2.1 信號系統新增功能
(1)全自動運行模式(FAM)和蠕動駕駛模式(CAM)
FAM 為在連續式通信控制級別下由列車自動防護(ATP)監控的列車全自動運行模式。在該模式下,ATP 子系統保證列車的運行安全,列車自動運行(ATO)子系統實現在正線、車輛段/停車場自動控制區域內的列車無人自動運行。在FAM 模式下具備自動進/出站、自動開/關門、自動喚醒/休眠、自動折返等功能。
當車輛通信出現故障時,經由控制中心人工確認,FAM 模式降級為CAM 模式。在CAM 模式下,ATP 監控列車以限制速度(小于25km/h)全自動運行,列車進站自動停車后,施加緊急制動,等待人工處理。CAM 應具備ATO 精確控制列車的功能[6]。
(2)列車休眠、喚醒
當列車運行至計劃中的休眠位置時,ATS 判斷列車具備無故障、在非檢修或清掃狀態、無任務、在FAM 模式下等休眠條件后,自動或人工向車載信號設備發送列車休眠指令。車載信號設備收到休眠指令并傳遞給車輛,車輛控制車載設備斷電并將休眠結果反饋給控制中心。
若休眠不成功,則報警。車場控制中心(DCC)調度員可在調度臺上人工遠程向該列車的車載信號設備發送休眠指令讓列車休眠。若人工遠程休眠還不成功,可由DCC 調度員通知工作人員上車進行人工休眠。
信號系統依據列車派班計劃在投入運營前的規定時間自動喚醒相應計劃出庫的列車。收到喚醒命令后,觸發車上各設備系統的靜態和動態自檢及測試,自檢測試結果應報送到OCC 行車調度臺和車輛調度臺,自檢的故障信息應在行車調度臺和車輛調度臺上顯示和報警。
自檢全部通過的列車為喚醒成功的列車,車載信號設備將默認為FAM 模式,列車進入上線前的等待工況。OCC 的行車調度工作站和DCC 的調度工作站上顯示列車處于上線待命狀態。列車按時刻表在獲取移動授權后自動出庫投入運營。
(3)進站對位停車調整
當列車以FAM 模式或者CAM 模式運行到車站停穩后,若停車位置準確,則系統自動打開車門及站臺門;若停車位置超出指定范圍,則車門和站臺門不能打開。當列車以FAM 或CAM 模式進站停車欠標超過5m(5m 以及下文提到的1m 都可根據實際情況自定義)時,車載設備向運行控制中心(OCC)調度臺報警,并繼續運行對位停車;當列車以FAM 或CAM 模式進站停車欠標未超過5m 時,車載設備向OCC 報告未停準信息,并在調度臺報警,車載設備以向前跳躍的方式自動調整對標,中心ATS 顯示列車處于跳躍對標的狀態。
當列車以FAM 或CAM 模式進站過標小于1m時,車載設備向OCC 報告未停準信息,并在調度臺報警,車載設備控制列車以跳躍方式自動調整對標,中心ATS 顯示列車處于跳躍調整的狀態。
當列車以FAM 或CAM 模式進站過標大于1m 時,車載設備自動施加緊急制動,停車后未過標5m 時,車載設備向OCC 報告未停準信息,并在調度臺報警。車載設備自動緩解緊急制動,并以向后跳躍的方式自動調整對標,中心ATS 顯示列車處于跳躍調整的狀態。
當列車以FAM 或CAM 模式進站過標大于1m時,車載設備自動施加緊急制動,停車后過標5m 時,車載設備不可自動緩解緊急制動,并向OCC 中心行車調度臺報告過標超過5m 且報警,綜合監控系統(ISCS)自動觸發車站站臺廣播,列車控制管理系統(TCMS)自動觸發車載廣播,中心乘客調度還可通過無線通信向列車進行語音廣播,同時進行人工站臺廣播,中心行車調度遠程緩解列車,并下達列車開往下一站停車的命令。
(4)遠程復位及控制
系統應具備中央列車運行監督和本地的兩級控制,兩級都可進行自動或者人工控制。其中,自動控制分為中央列車運行監督自動控制、聯鎖設備自動控制,人工控制分為中央列車運行監督人工控制和本地聯鎖設備人工控制兩類。相較于自動控制的進路,人工控制的進路優先級更高。控制中心可實現遠程的自動或人工控制列車。
(5)自動洗車
當聯鎖系統采集到洗車機準備就緒的狀態時,列車運行監督系統根據洗車計劃自動排列至洗車庫的進路,列車以全自動運行模式運行至洗車庫前停車。在收到洗車機的洗車確認后,信號系統向車輛發送“洗車”任務,開始洗車。
洗車過程中,信號系統根據洗車機的需要控制列車停止或移動到特定的洗車位置。洗車完畢,列車運行至洗車庫停車點停車,退出洗車模式,列車繼續以全自動運行模式運行回庫。
(6)人員防護
聯鎖系統與設置的人員防護開關(SPKS)接口,當工作人員通過SPKS 封鎖作業區域后,聯鎖系統不允許辦理經過該封鎖區域的進路,從而保證工作人員的安全。
3.2.2 通信系統新增功能
(1)在控制中心增加車輛及乘客無線調度臺,為調度人員提供運行車輛現場圖像、乘客緊急對講、故障信息以及相關聯動調度指令下發的傳輸通道,涉及無線通信、視頻監視、乘客信息、車站廣播系統等。
(2)在列車上增加車頭、車尾兩端的固定臺與列車廣播系統及列車對講電話的接口。
(3)車頭車尾各增加一路觀察路況的監控攝像機。
(4)各列車客室增設攝像機,實現客室監控全覆蓋。
(5)CCTV 與其他系統聯動,實現圖像自動推送。
3.2.3 綜合監控系統新增功能
(1)強化與信號系統中列車自動監督(ATS)的接口,接收ATS 提供的信號系統信息。
(2)強化與通信視頻監控系統(CCTV)、廣播對講系統(PA)、乘客信息系統(PIS)等系統接口,增強聯動功能。
(3)強化與站臺門的接口,實時監視車門狀態、車門與站臺門的對位隔離狀態。
(4)強化自動開、關站等聯動功能,提高車站自動化水平。
(5)強化對車輛健康狀態及火災自動報警系統的監視功能。
3.2.4 站臺門系統新增功能
(1)SIL4 級認證:通過信號系統和站臺門控制系統的相互結合,完成對站臺門的精準控制,并將站臺門控制系統安全等級提升至最高等級SIL4,最大程度地保證乘客上下車及列車運行的安全。
(2)對位隔離功能:當即將到站列車車門故障無法開啟時,信號系統提供故障車門的編號等信息給站臺門系統,該列車停站時故障車門對應的站臺門滑動門應能保持鎖閉不開啟(即對位隔離);相應地,當車站站臺門系統某一道滑動門故障或被人工鎖閉隔離后,站臺門系統提供故障滑動門編號等信息給信號系統,停該側站臺的所有列車相對應的車門應保持鎖閉,不進行該列車車門的開、關門作業。
(3)防夾檢測功能:關閉站臺門時,會檢測有無障礙物。
(4)故障運營模式:一個站臺門故障,可將其與對應的列車車門對位隔離,不影響列車的正常運行。
3.2.5 車輛系統新增功能
(1)全自動運行模式(FAM)、蠕動駕駛模式(CAM)。
(2)列車休眠、喚醒和自檢。
(3)與綜合監控系統的聯動。
(4)車門與站臺門對位隔離。
(5)列車自動運行、對位停車及開關車門。
(6)新增車輛調度工作站,實現列車遠程控制。
(7)主動障礙物檢測。
(8)自動連掛/解編。
(9)其他功能:如空調遠程控制、照明系統遠程控制、脫軌監測、自動升降弓、故障傳輸等。
3.2.6 車輛基地新增功能
(1)自動化車輛段/停車場,實現無人區內自動運行功能。
(2)增加人員防護措施,無人區與有人區之間設隔離措施,增加門禁。
(3)增加對車輛段/停車場廣播聯動功能。
(4)加強無人區內廣播、視頻監控及火災報警等各系統的聯動功能。
(5)增加停車列檢庫庫門與該分區行車進路信號的聯動。
(6)全自動洗車。
(7)停車庫內設置獨立的登車通道。
(8)設置有人區/無人區轉換軌及登車平臺。
4 全自動運行系統關鍵技術
4.1 主動障礙物檢測
列車障礙物檢測分為被動檢測和主動檢測。相比被動檢測,主動障礙物檢測手段更能確保行車安全,因此建議全自動運行系統采用主動障礙物檢測手段。
主動檢測可將圖像識別技術、毫米雷達波技術、激光雷達技術相融合,并與信號系統聯動。當檢測到障礙物時,信號系統可控制列車制動,從而保證列車運行安全。
4.2 站臺門縫隙檢測
車門與站臺門間異物檢測技術:在車門和站臺門關閉后,可采用激光對射、激光掃射、視頻檢測等技術,檢測車門與站臺門間縫隙內的障礙物,從而取代司機瞭望和確認,保證旅客的乘降安全和節省司機確認時間,提高行車效率和運營效益。
4.3 自動連掛與解編
無人自動連掛可實現列車救援,減少列車在區間被迫停車后對整體運營的影響,特別是在緊急狀態下,列車通過自動連掛與解編可減小災難的后果。
要想實現自動連掛與解編,機械上要保證運營線路上的列車都能機械連掛上,管路上要保證空壓管路聯通,電氣上要保證列車MVB 或控制網絡聯通,實現對故障列車的控制。此外,還需要信號系統控制連掛列車的安全運行。
5 結語
綜上所述,隨著我國交通系統的技術升級,全自動運行系統的優勢愈加明顯,是我國軌道交通發展的重要方向之一。相關人員必須在明確其應用優勢和必要性的基礎上,進一步探索全自動運行系統的新增功能和關鍵技術,從列車運行安全及乘客需求入手,不斷提高列車運行自動化水平,進而提高城市交通系統的智能化水平,為我國建設智慧城市軌道交通的藍圖添磚加瓦。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20