路面裂縫的結(jié)構(gòu)光車載檢測技術(shù)研究
2022-12-21 01:38:46劉希偉
交通科技與管理 2022年23期
劉希偉
(新疆公路橋梁試驗檢測中心有限責(zé)任公司,新疆 烏魯木齊 831000)
0 引言
基于2d影像的檢測路面裂縫技術(shù),因為難于克服路面陰影、污漬、不均光照等不利因素的干擾,測量結(jié)果經(jīng)常會存在相當(dāng)數(shù)量的誤判或者漏檢。針對2d影像裂縫檢測技術(shù)所存在的技術(shù)不足,3d結(jié)構(gòu)光檢測技術(shù)相繼得到開發(fā)應(yīng)用。該技術(shù)利用3d識別和信息獲取優(yōu)勢,形成抗御環(huán)境光干擾能力強,細節(jié)獲取更充分,影像反應(yīng)更接近真實物態(tài),識別精度更高等技術(shù)優(yōu)勢,被越來越廣泛地應(yīng)用到路面裂縫檢測中。
1 線結(jié)構(gòu)光掃描檢測原理
1.1 線激光掃描原理
路面裂縫的結(jié)構(gòu)光檢測技術(shù)屬于非接觸式路面裂縫檢測技術(shù),應(yīng)用線激光三角檢測原理實現(xiàn)裂縫測量,具體見圖1所示。圓柱體代表攝像機,立方體代表線激光器,攝像機光軸與線激光器光平面的交點建立水平測量基準(zhǔn)面,θ1為測量基準(zhǔn)面法線與線激光器光平面的夾角,θ2為測量基準(zhǔn)面法線與攝像機光軸的夾角。按θ1的角度,激光從一側(cè)投影激光平面至基準(zhǔn)面上面,在基準(zhǔn)面上構(gòu)成一條直線激光條紋。如果基準(zhǔn)面存在物體或變形,光條被調(diào)制發(fā)生變形。攝像機以θ2的角度從另一側(cè)檢識掃描反射光,經(jīng)過數(shù)理模型變換和識別處理,獲得掃描面的裂縫信息。結(jié)構(gòu)光檢測技術(shù)能夠形成對路面裂縫的3d識別系統(tǒng),因此其裂縫識別更立體、直觀和準(zhǔn)確。

圖1 線激光檢測原理
1.2 感受器組合方式
依據(jù)線激光與攝像機的空間幾何關(guān)系,線結(jié)構(gòu)光感受器的結(jié)構(gòu)可分為3種,見圖2所示。
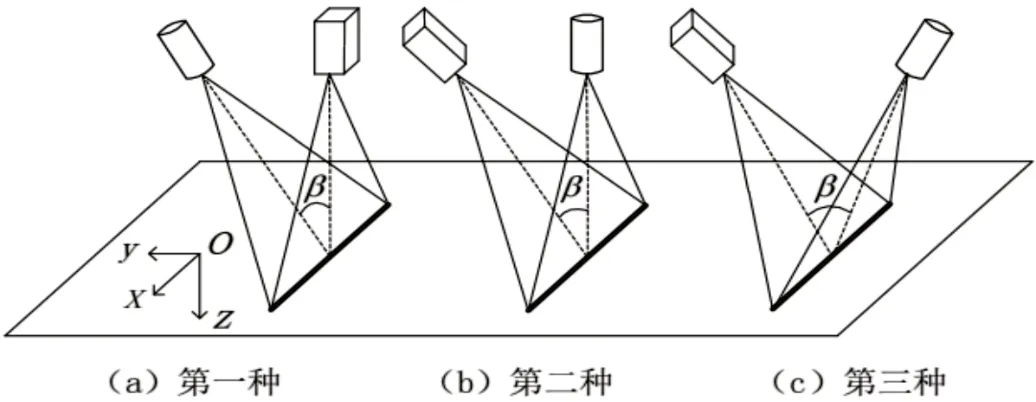
圖2 感受器組合方式
(1)垂直投射線激光到待測物體表面,攝像機從一側(cè)傾斜采集數(shù)據(jù)。
(2)線激光從一邊投射到被測物體表面,攝像機垂直捕獲數(shù)據(jù)。
(3)線激光被斜投射到被測物體表面,攝像機也從另一側(cè)斜向捕捉數(shù)據(jù)。見圖2具體所示,β是線激光平面和攝像機光平面之間的夾角[1]。
1.3 路面縫隙抗顛簸結(jié)構(gòu)光檢測模型
結(jié)構(gòu)光檢測路面縫隙抗顛簸模型見圖3所示。
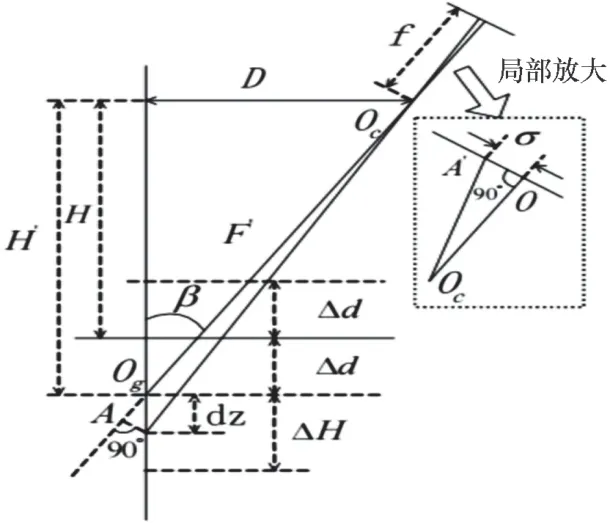
圖3 路面縫隙抗顛簸結(jié)構(gòu)光檢測模型
當(dāng)承載平臺顛簸時,檢測面與線激光間的距離就會不停地變化,檢測分辨率因此深受干擾。為了克服這個問題,在圖3所示的感受器抗顛簸測量模型中,將攝像機鏡頭的光軸與檢測平面的交點水平移動至基準(zhǔn)面的下方,其與基準(zhǔn)面的距離就是顛簸量Δd的最大值,這樣即使顛簸過程中,檢測分辨率依然可以滿足檢測精度要求。
2 感受器參數(shù)計算與優(yōu)化選擇
2.1 感受器參數(shù)計算
檢測指標(biāo)包括:掃描速度v、測寬L、測深±ΔH,深度分辨率dz、縱向分辨率dy,橫向分辨率dx。
系統(tǒng)掃描獲得包含道路信息的光條影像,每條影像反映xoz平面的形態(tài)變化,dx表示鏡頭在x軸向上的分辨率,dz標(biāo)示鏡頭z軸向上的分辨率。dy表示系統(tǒng)與道路橫斷面采樣在y軸方向上的距離,其與幀率fps、掃描速率v之間的關(guān)系式:

感受器的結(jié)構(gòu)參數(shù)包括檢測寬度l、高度H、鏡頭焦距f、攝像機光軸與光平面夾角β、鏡頭視區(qū)等。
(1)實際檢測寬度l與感受器數(shù)量n。假設(shè)單車道為3.75 m寬度,由于高度限制,單套感受器無法滿足這樣的寬度。為此采取了如下技術(shù)處理,檢測寬度≤2 m,使用1套感受器,檢測寬度>2 m,則應(yīng)用2套感受器[2]。
(2)檢測高度H公式如下,其中θ為線激光器的扇形角度。

(3)鏡頭視區(qū)ROI公式:

(4)幀率fps公式如下,其中v為掃描速度,dy為縱向分辨率。

(5)鏡頭焦距f公式:

(6)攝像機光軸dz與光平面夾角β公式:

(7)檢測寬度l'計算公式:

(8)橫向分辨率dx'計算公式:

滿足dx'≤dx,返回結(jié)束;否則增加焦距f,記f',從(6)或(5)重新開始計算。相對簡潔的是從(6)重新開始計算,該計算中深度分辨率變得更高。從(5)重新開始計算,深度分辨率不變,但感受器體積會縮小。
通過前述設(shè)計方法,可以得到滿足檢測系統(tǒng)要求的感受器結(jié)構(gòu)參數(shù)值和取值范圍。
2.2 感受器參數(shù)優(yōu)化選擇
2.2.1 感受器成像模型
感受器成像模型見圖4所示,其中包括3個坐標(biāo)系:Og-XgYgZg世界坐標(biāo)系、Oc-XcYZc攝像機坐標(biāo)系和O-XYZ影像坐標(biāo)系。Og-XgYgZg由Oc-XcYZc和激光平面確定。其中的Zq軸為攝像機光軸,Oc為攝像機光軸中心點。Zc軸與像平面的交點即為影像坐標(biāo)系O點,即像平面的中心,攝像機坐標(biāo)軸與影像坐標(biāo)軸平行,線激光平面與Zc軸的交點為世界坐標(biāo)系Og點。Yg軸垂直于線激光平面,Zg軸為Zc軸在線激光平面上的投影。

圖4 感受器的成像模型
2.2.2 感受器測量誤差分析
治療中體表光學(xué)監(jiān)測X、Y和Z方向分別平移(0.02±0.24)、(0.09±0.40)和(0.02±0.18) mm,CBCT驗證分別平移(0.01±0.37)、(0.03±0.24)和(0.03±0.19) mm,兩者比較差異無統(tǒng)計學(xué)意義,t值分別為0.04、0.41和0.58,P值分別為0.97、0.68和0.57。
(1)間接測量誤差分析。依據(jù)線結(jié)構(gòu)光成像模型,通過直接測量感受器結(jié)構(gòu)參數(shù)和對應(yīng)的像點坐標(biāo),根據(jù)已知的函數(shù)關(guān)系,可以計算出被測物體的坐標(biāo)值。通過函數(shù)關(guān)系將前述數(shù)學(xué)模型總結(jié)如下:

根據(jù)誤差分析理論,可獲得物體坐標(biāo)的測量誤差:

式中,k取Xg和Zg,i則取值H、f、X和Y,Δk表示感受器測量誤差,Δi表示感受器結(jié)構(gòu)參數(shù)的校準(zhǔn)誤差和測點坐標(biāo)的獲取誤差。出于方便計算考慮,式中測量誤差Δ取2的范數(shù),即:

(2)測量誤差的因素影響關(guān)系。感受器測量誤差的影響因素有2個:一是物體像點坐標(biāo)獲取誤差;二是感受器參數(shù)或校準(zhǔn)誤差。對于給定的系統(tǒng),感受器參數(shù)已基本被精確校準(zhǔn),故基本可以忽略誤差。像點坐標(biāo)獲取算法確定后,假定像點誤差為定值,也就是ΔX=ΔY=δ,則感受器測量誤差:

2.2.3 感受器結(jié)構(gòu)參數(shù)優(yōu)化
由以上分析可知,感受器在像面上的測量誤差分布并不規(guī)則。因此通過研究圖像平面中最大測量誤差像素點,分析感受器參數(shù)對誤差的影響,優(yōu)化感受器結(jié)構(gòu)參數(shù)。像面為2Tx×2Ty。像平面X=±Tx上,Y=Ty的邊緣點所對應(yīng)的最大測量誤差為:

在確定像點坐標(biāo)獲取算法后,δ值即得以確定,但探測寬度所要求的感受器參數(shù)H和f須給予確定。所以影響感受器測量誤差的主要是β,并且其影響呈現(xiàn)非線性特點。
可以采用優(yōu)化定義準(zhǔn)則的方式確定相關(guān)感受器參數(shù)。目標(biāo)函數(shù)即為上述關(guān)系式(13)。在考慮規(guī)格空間限制和滿足系統(tǒng)檢測指標(biāo)的前提下,盡可能獲得目標(biāo)函數(shù)的最小值,即為優(yōu)化的結(jié)構(gòu)參數(shù)。
2.3 試驗計算與優(yōu)化結(jié)果
2.3.1 試驗初步計算結(jié)果
實例檢測寬度50 cm,縱向分辨率1 cm,橫向分辨率0.1 cm,深度分辨率0.1 cm,掃描速率為80 km/h。深度測量±10 cm:測量范圍10 cm,顛簸±10 cm,線激光扇角度 44°[3]。
基于感受器參數(shù)計算技術(shù)獲得的計算結(jié)果如下:H=61.9 cm,攝像機的幀頻為2 223fps,f=1.2 cm,67.69>β>22.49,β=25°得到攝像機的感受區(qū)域ROI≥(1 553,499),選擇ROI=(1 600、550)。然后基于0.17 cm的形變量、不同的顛簸和測深條件,進行測量,每個測量段的6個不同位置測量所得像素變化具體見表1所示。
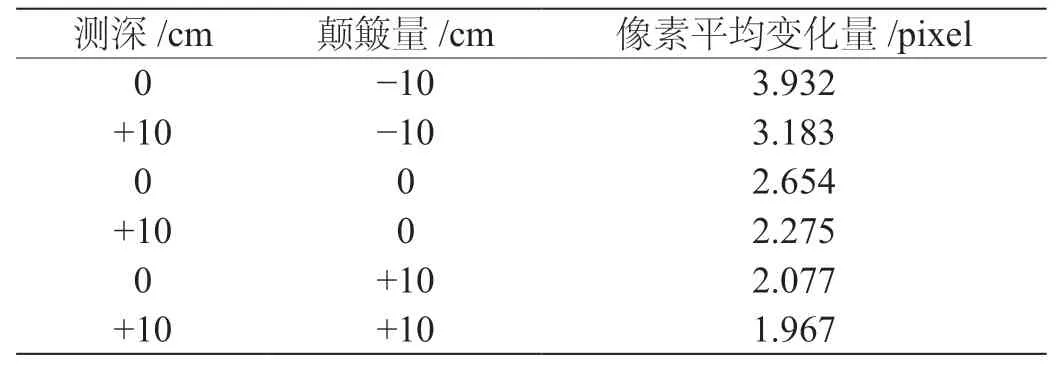
表1 測量所得像素變化結(jié)果
檢測數(shù)據(jù)顯示,最大顛簸量和測深條件下,測量系統(tǒng)符合0.1 cm的深度分辨率功效要求,對工程測量具有應(yīng)用價值。
2.3.2 進一步優(yōu)化計算結(jié)果
上節(jié)計算得出67.69>β>22.49的結(jié)構(gòu)光角度組合成果,但這僅是一個取值區(qū)間。該節(jié)再借助上述感受器參數(shù)優(yōu)化確定選擇方法,進一步優(yōu)化取值。所獲得的感受器參數(shù)優(yōu)化仿真結(jié)果具體見圖5所示。曲線顯示,當(dāng)β取值47°時,獲得最小檢測誤差,因此β=47°即為最佳解,從而進一步提高了測量精度。
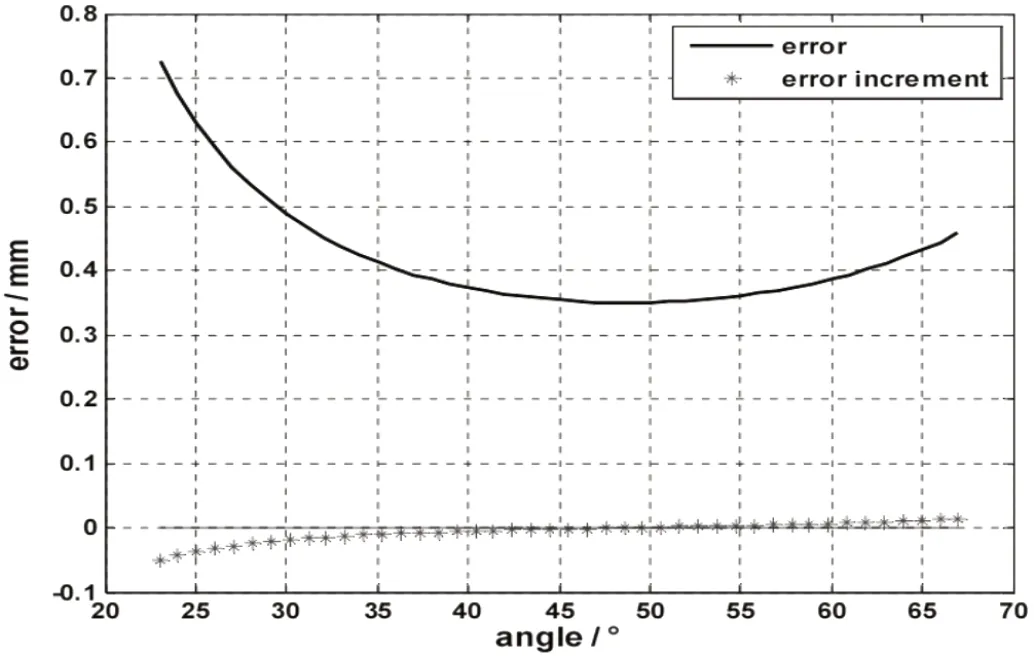
圖5 檢測誤差與β的影響關(guān)系
通過對前述感受器結(jié)構(gòu)參數(shù)的改進結(jié)果,即β=47°時,檢測系統(tǒng)在不同顛簸條件下測量不同測深下的1.7 mm變形量,根據(jù)檢測面不同位置的像素變化結(jié)果數(shù)據(jù)顯示,參數(shù)改進后,檢測系統(tǒng)的檢測精度有所增強。
3 結(jié)語
該文開展了路面裂縫的結(jié)構(gòu)光車載檢測技術(shù)研究,主要包括:
(1)介紹了線結(jié)構(gòu)光檢測原理,包括掃描原理、感受器組合方式、抗顛簸結(jié)構(gòu)光檢測模型等技術(shù)點。
(2)介紹了感受器參數(shù)計算與優(yōu)化選擇技術(shù),包括感受器參數(shù)計算、感受器成像模型、感受器測量誤差分析、感受器結(jié)構(gòu)參數(shù)優(yōu)化等技術(shù)點。
(3)介紹了試驗計算結(jié)果,驗證了該技術(shù)的工程適用性。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中華詩詞(2019年7期)2019-11-25 01:43:04
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12