基于微光頭盔觀察、懸掛式紅外夜視儀光學系統設計
2022-12-24 02:07:12孫愛平胡健釧安長亮李訓牛汪陳躍龔楊云宋宇宇
紅外技術 2022年12期
關鍵詞:融合
孫愛平,胡健釧,安長亮,李訓牛,汪陳躍,龔楊云,宋宇宇
基于微光頭盔觀察、懸掛式紅外夜視儀光學系統設計
孫愛平,胡健釧,安長亮,李訓牛,汪陳躍,龔楊云,宋宇宇
(北方夜視科技研究院集團有限公司,云南 昆明 650223)
頭盔夜視儀由單波段向多波段圖像融合的方向發展。本文對基于微光頭盔觀察、懸掛式紅外夜視儀的技術方案、圖像配準精度進行分析并進行光學仿真。首先分析懸掛式紅外夜視儀與微光頭盔組合使用的工作模式以及圖像旋轉、圓形視場的設計方案;其次根據懸掛式紅外夜視儀的設計指標,對其紅外物鏡及投影物鏡進行光學仿真;第三從懸掛精度、光軸一致性及畸變等三方面分析圖像配準精度;最后根據仿真結果及圖像配準精度分析說明基于微光頭盔觀察、懸掛式紅外夜視儀的技術方案可行,能達到預期的效果。
投影物鏡;紅外物鏡;圖像融合;圖像配準;懸掛式;紅外夜視儀
0 引言
夜視儀作為夜間行軍作戰的重要裝備,一直以來是各國研究的重點,圍繞著紅外、微光等技術研制出不同種類的夜視裝備,其中頭盔夜視儀是單兵裝備發展的要點[1]。微光頭盔利用目標反射的低照度(10-1~10-3lx)月光、星光、大氣輝光等光線,通過微光物鏡匯聚到微光頭盔的核心器件微光像增強器上并轉換為電子,電子進行倍增后轟擊熒光屏,形成人眼可視的圖像[2]。使用二代或二代半技術的微光頭盔為被動工作方式,容易受外界光照度的影響,但價格相對便宜,是現役頭盔裝備中的主流產品[3]。與微光頭盔相比,紅外頭盔是一種利用目標與背景輻射能量的差異而成像,是一種被動工作方式,它工作時不受外界照度的影響,并具有一定的穿透煙、霧、塵等的能力和識別簡單偽裝的能力。
為了實現微光與紅外各自的技術優勢,圖像融合技術逐漸成為主流發展方向。為了給士兵提供更多的圖像信息,美軍開發出一款微光與紅外光學式圖像融合的頭盔夜視儀(AN/PSQ-20),此夜視儀具有微光、紅外雙光通道,可將目標的微光圖像和紅外圖像進行光學疊加融合,實現微光與紅外各自技術優勢的互補[4]。AN/PSQ-20頭盔夜視儀采用微光與紅外獨立鏡頭的設計模式,造成夜視儀體積較大、重量較重,佩戴舒適性不好[1,5]。
為了減輕佩戴重量及在現役微光頭盔的基礎上實現微光與紅外的圖像融合,美軍后續開發出一款可拆卸、懸掛式的紅外熱像儀AN/PAS-29A,此熱像儀是一款倍率為1×的紅外望遠鏡。在需要觀察微光與紅外融合圖像時,可把AN/PAS-29A懸掛在微光頭盔上,通過微光頭盔可觀察到微光與紅外的光學融合圖像。
國內現役裝備的微光頭盔主要是使用二代或超二代像增強器的產品,沒有裝備微光與紅外融合的頭盔產品,也沒有見到相關產品信息的公開報道。
本文在AN/PAS-29A紅外熱像儀及國內成熟器件的基礎上開展基于微光頭盔觀察、懸掛式紅外夜視儀光學系統的仿真設計。
1 技術方案分析
1.1 懸掛式紅外夜視儀與微光頭盔組合工作模式
微光頭盔與懸掛式紅外夜視儀組合使用型式如圖1所示。懸掛式紅外夜視儀主要由紅外組件和投影組件所組成,二者組成1×的紅外望遠鏡系統。目標與背景輻射的能量差異被懸掛式紅外熱像儀接收并轉換為人眼可視圖像,此可視圖像以平行光出射的方式投射到微光頭盔上,形成微光與紅外光學疊加式的融合圖像,如圖2所示。微光頭盔與懸掛式紅外夜視儀工作示意圖如圖3所示。
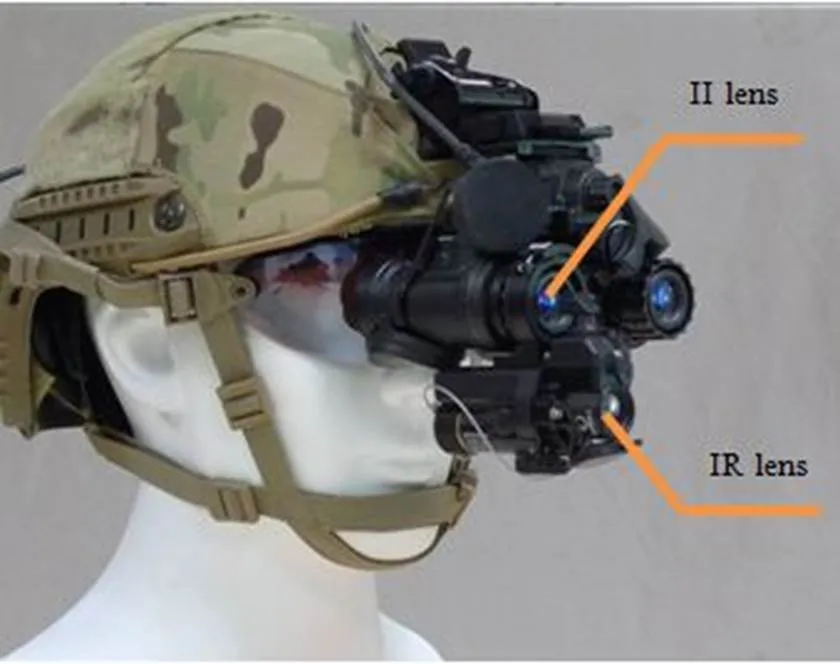
圖1 微光頭盔與懸掛式紅外夜視儀組合方式

圖2 微光頭盔與懸掛式紅外夜視儀融合圖像
對于頭戴輔助夜視系統,其視放大率要求為1×,則對應的微光頭盔及懸掛式紅外夜視儀的視放大率需要設定為1×,此時可保證當懸掛式紅外夜視儀懸掛在微光頭盔上組合使用時的視放大率達到1×的使用要求。
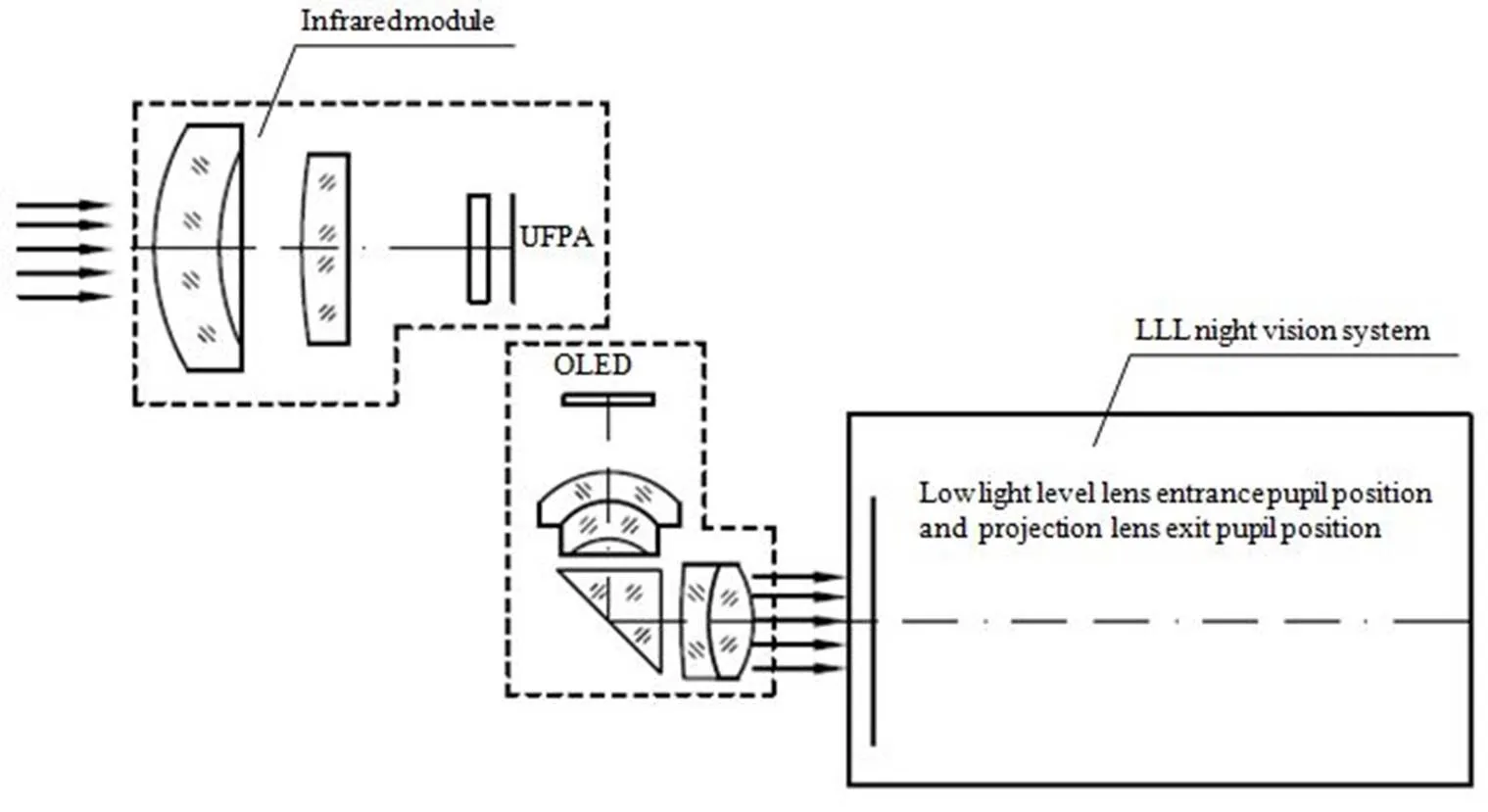
圖3 微光頭盔與懸掛式紅外夜視儀工作示意圖
1.2 圖像旋轉設計方案
由于懸掛式紅外夜視儀采用外掛使用方式,可懸掛在微光頭盔的下側,也可懸掛在微光頭盔的左右兩側。隨著懸掛方式的不同,以懸掛式紅外夜視儀內置的電子羅盤判斷懸掛方位,以圖像中心為基準進行90°的4個相位旋轉,以適應左側、左下、右側、右下,共4個不同掛裝位置。
通過分析標準視頻信號,如果全畫幅使用,其圖像長寬的比例為4:3,只能進行左右、上下鏡像處理,不能滿足使用要求。要實現90°的4個方向旋轉,需要器件感光部分尺寸和顯示部分尺寸的長寬比例均為1:1。基于此設計要求,懸掛式紅外夜視儀的紅外成像機芯感光面分辨率為288×288,OLED顯示面分辨率為576×576,其余像素做消隱處理,如圖4所示。
1.3 圓形視場設計方案
此懸掛式紅外夜視儀把OLED所成圖像投影到1×微光頭盔前端,經1×微光頭盔后被人眼觀察。微光頭盔的成像器件是微光像增強器,其感光面和顯示面均為圓形,懸掛式紅外夜視儀所投影圖像為圓形可與微光頭盔實現更好的圖像融合效果。
基于此紅外物鏡設計視場為圓形,其線視場為288×288方形區域的內接圓,方形區域與內接圓區域之間的區域(夾層區域)也參與成像,其成像質量不做控制。依據光學仿真分析,夾層區域的圖像質量隨距離圓心間隔的增大,圖像質量逐漸變壞,是一個漸變的過程。OLED所成圖像也為方形,此時在貼近OLED保護窗處放置一個圓形視場光闌,此時通過OLED所投射的圖像為圓形圖像,并通過微光頭盔被人眼觀察,如圖5所示。
2 懸掛式紅外夜視儀光學仿真分析
2.1 設計指標
從夜視儀的重量、體積及成本綜合考慮,紅外物鏡選用384×288、17mm的非制冷型長波紅外機芯、投影物鏡選用800×600、12.6mm的微型OLED顯示器。所選器件是市面批量供應的器件,性能穩定、貨源充足。紅外物鏡焦距選擇13.88mm,F數選擇為1,圓形視場為20°;投影物鏡焦距選擇為20.58mm,F數選擇為4,圓形視場為20°。紅外物鏡和投影物鏡組成1×的紅外望遠鏡,對應圓形視場為20°。懸掛式紅外夜視儀光學設計參數如表1所示。
2.2 紅外物鏡光學仿真分析
為了盡可能地減小懸掛式紅外夜視儀的體積、重量并適應不同的工作溫度,紅外物鏡采取定焦光學被動消熱差設計方式,紅外物鏡的設計型式見圖6。紅外物鏡光學透鏡材料選擇Ge和IRG206,鏡筒材料選擇鋁合金,面型選擇常用的球面、非球面和二元衍射面,其中二元衍射面放置在第二透鏡的前表面上。通過以上組合型式進行紅外物鏡的光學性能優化設計,使像面在各個溫度點下都與紅外機芯的靶面相重合。
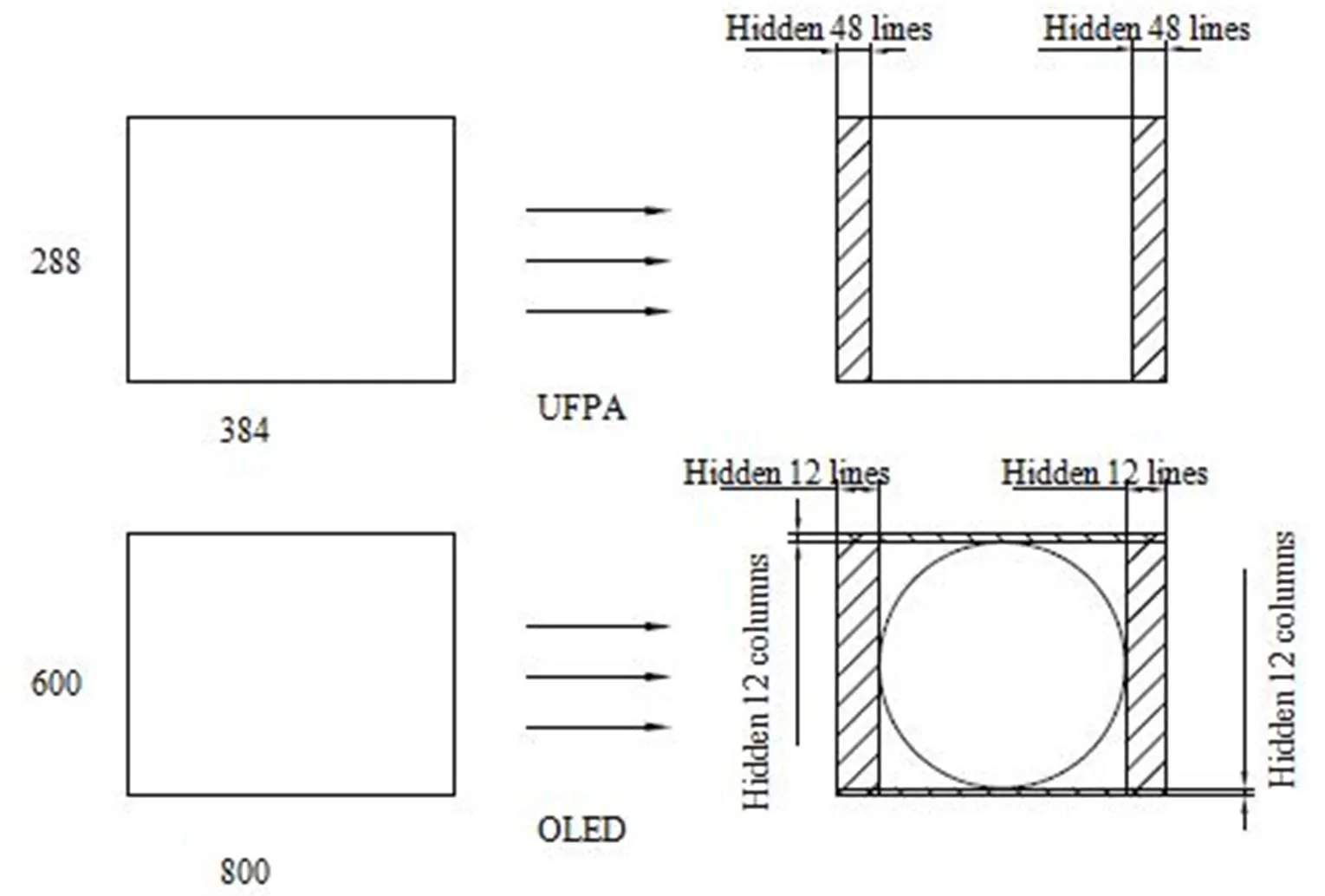
圖4 器件工作有效區域示意圖
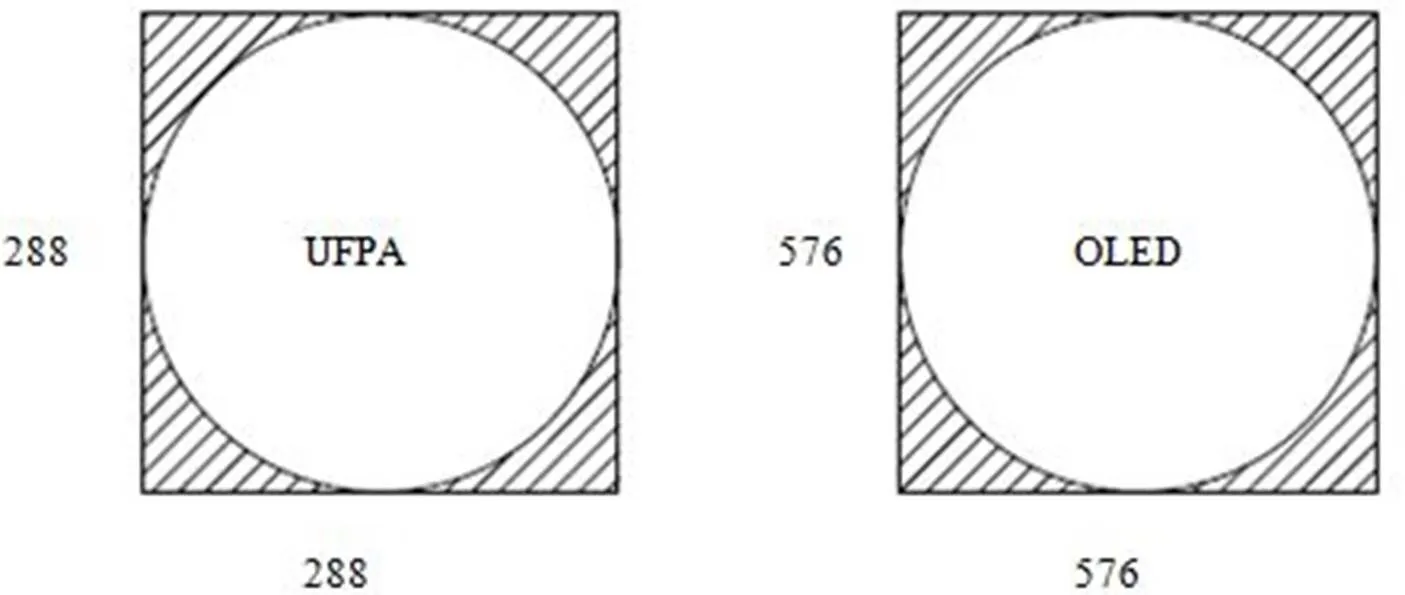
圖5 設計的圓形視場示意圖

表1 懸掛式紅外夜視儀光學參數
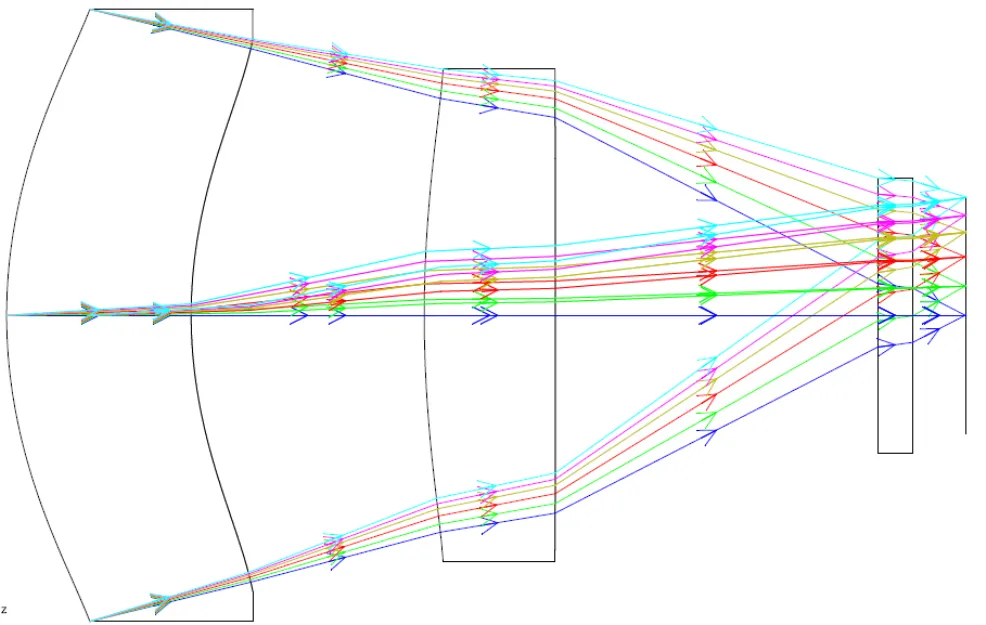
圖6 紅外物鏡設計型式
紅外物鏡在常溫(20℃)、低溫(-40℃)和高溫(60℃)條件下的傳遞函數(MTF)曲線如圖7所示。紅外物鏡的MTF在奈奎斯特頻率(29.4 lp/mm)處除邊緣視場外對比度約在0.5以上,中心視場區域的對比度接近衍射極限,依此判斷紅外物鏡在工作溫度范圍內像差校正效果較好。

2.3 投影物鏡光學仿真分析
投影物鏡由兩個雙膠合透鏡及一個直角棱鏡所組成,其設計型式見圖8。所選透鏡材料均為成都光明的環保型無色玻璃,鏡筒選用鋁合金材料。投影物鏡也采用光學被動消熱差的設計型式,依此來減少溫度變化而帶來的調節環節,進而減輕體積和重量。
投影物鏡在常溫(20℃)、低溫(-40℃)和高溫(60℃)條件下的傳遞函數(MTF)曲線如圖9所示。投影物鏡的MTF在奈奎斯特頻率(39.7 lp/mm)處除邊緣視場外對比度約在0.7以上,中心視場區域的對比度接近衍射極限。根據1.2節所述,紅外機芯實際使用分辨率為288×288,OLED顯示所用的分辨率為576×576,則投影物鏡實際使用的MTF頻率為奈奎斯特頻率的一半。據此在常溫、低溫和高溫條件下投影物鏡的MTF在19.9 lp/mm處除邊緣視場外對比度約在0.9以上。依據以上分析,投影物鏡校正后成像質量良好,能滿足使用要求。
3 光學融合配準精度分析
3.1 懸掛式紅外夜視儀懸掛精度分析
由于懸掛式紅外夜視儀與1×微光頭盔之間采用外掛式工作模式,并使用平行光路進行圖像傳輸,可避免出現模糊的融合圖像。

圖8 投影物鏡設計型式

圖9 投影物鏡傳遞函數曲線
懸掛式紅外夜視儀的視放大率為1×,則具有以下關系:
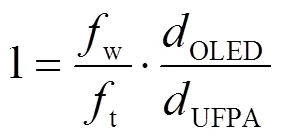
式中:紅外物鏡的焦距為w;投影物鏡的焦距為t;OLED為OLED圓形顯示面尺寸;UFPA為UFPA圓形感光面尺寸。
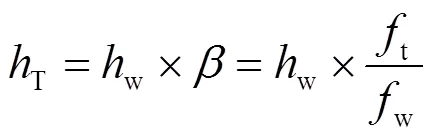
則顯示器件與成像器件之間垂軸放大率計算如下:

微光物鏡光軸上一物點,經微光物鏡成像后其像點3也在光軸上(微光物鏡圖像中心)。在微光物鏡前端外掛一個懸掛式紅外夜視儀,由于外掛連接圈精度限制,懸掛式紅外夜視儀的光軸與微光物鏡的光軸夾角為。假設物點與紅外物鏡的距離為,與紅外物鏡光軸的距離為,則物點在紅外機芯上所成像點1(此時像點在UFPA上)與紅外物鏡光軸的距離w計算如下:
式中:w也是像點1與紅外機芯中心的距離。
在實際裝調時OLED所成圖像要進行一次倒像。
像點1在OLED上顯示時對應的像點2距離OLED中心的距離T計算如下:
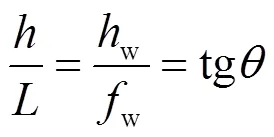
像點2經投影物鏡后以平行光出射,則像點2的出射光與紅外物鏡光軸夾角計算如下:
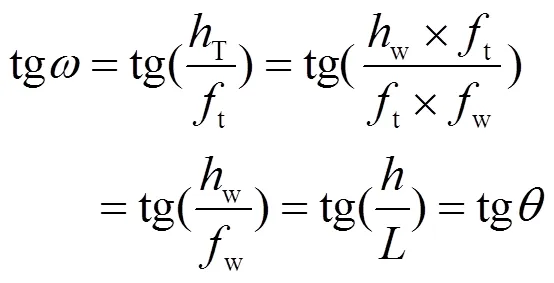
即=。
則懸掛式紅外夜視儀的出射光與紅外物鏡光軸夾角為,與微光物鏡光軸夾角為0,說明物點經傾斜的懸掛式紅外夜視儀傳輸后經微光頭盔成像的像點與直接經微光頭盔所成圖像的像點相重合,即懸掛式紅外夜視儀懸掛傾斜的角度不影響融合圖像的配準精度。成像示意圖如圖10所示。
3.2 紅外物鏡與投影物鏡光軸一致性分析
在理論條件下紅外物鏡與投影物鏡的光軸沒有光軸偏差,此時無窮遠目標發出的平行光線分別經紅外物鏡、投影物鏡后以平行光出射,并以0°視場角入射到微光物鏡,則目標的像點¢在微光物鏡焦面中心,與無窮遠目標直接經微光物鏡所成圖像相重合。
在實際裝調時紅外物鏡與投影物鏡具有一定的光軸偏差角,此時無窮遠目標發出的平行光線分別經紅外物鏡、投影物鏡后以平行光出射,并以視場角入射到微光物鏡,則目標的像點¢與微光物鏡焦面中心有D的距離偏差,即與無窮遠目標直接經微光物鏡所成圖像的距離偏差也為D。此時進行光學融合時造成圖像配準的偏差,易形成重影模糊的融合圖像。圖11為光軸無偏差時融合成像示意圖,圖12為光軸有偏差時融合成像示意圖。
D=II×tg(6)
式中:II為微光物鏡的焦距。
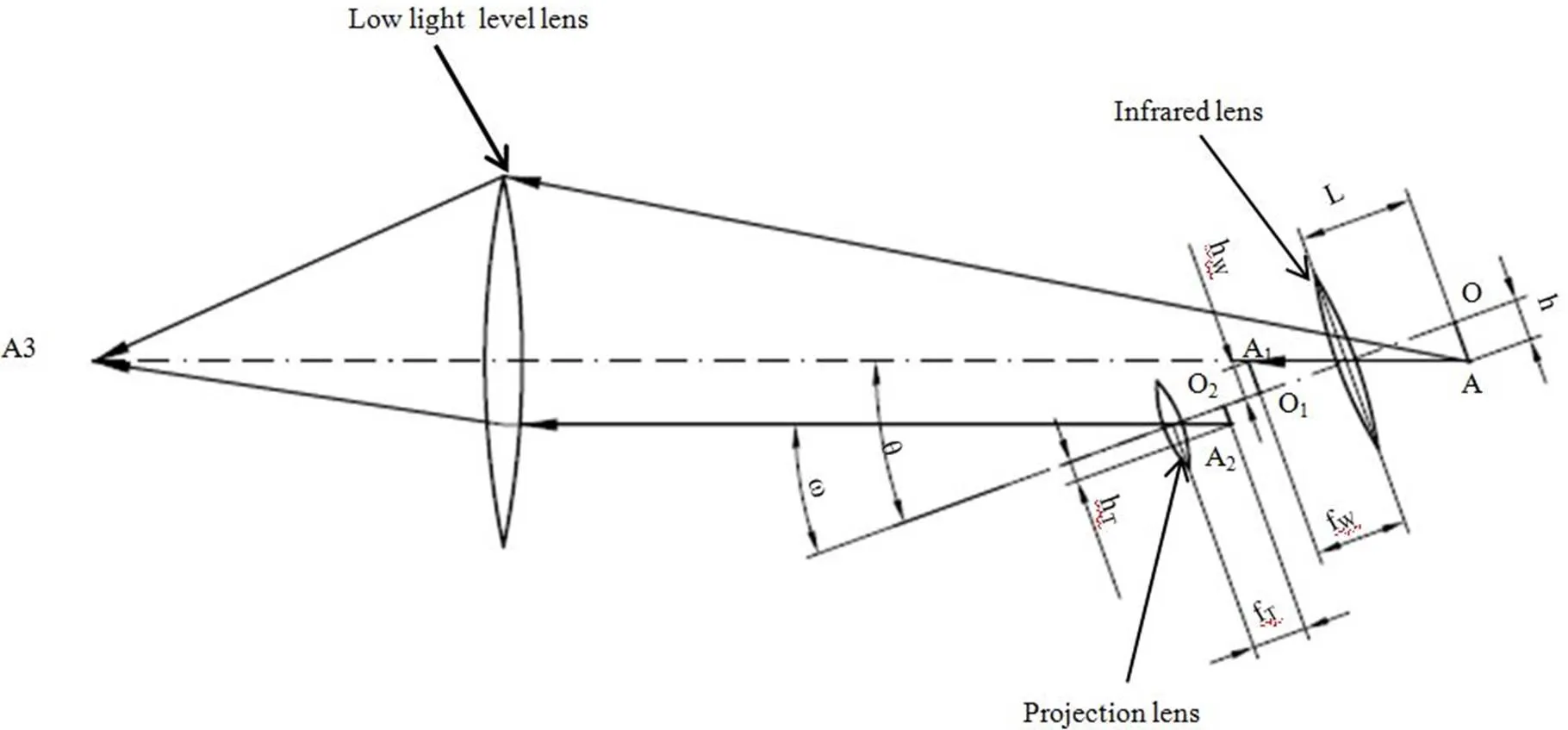
圖10 紅外夜視儀傾斜懸掛時成像關系
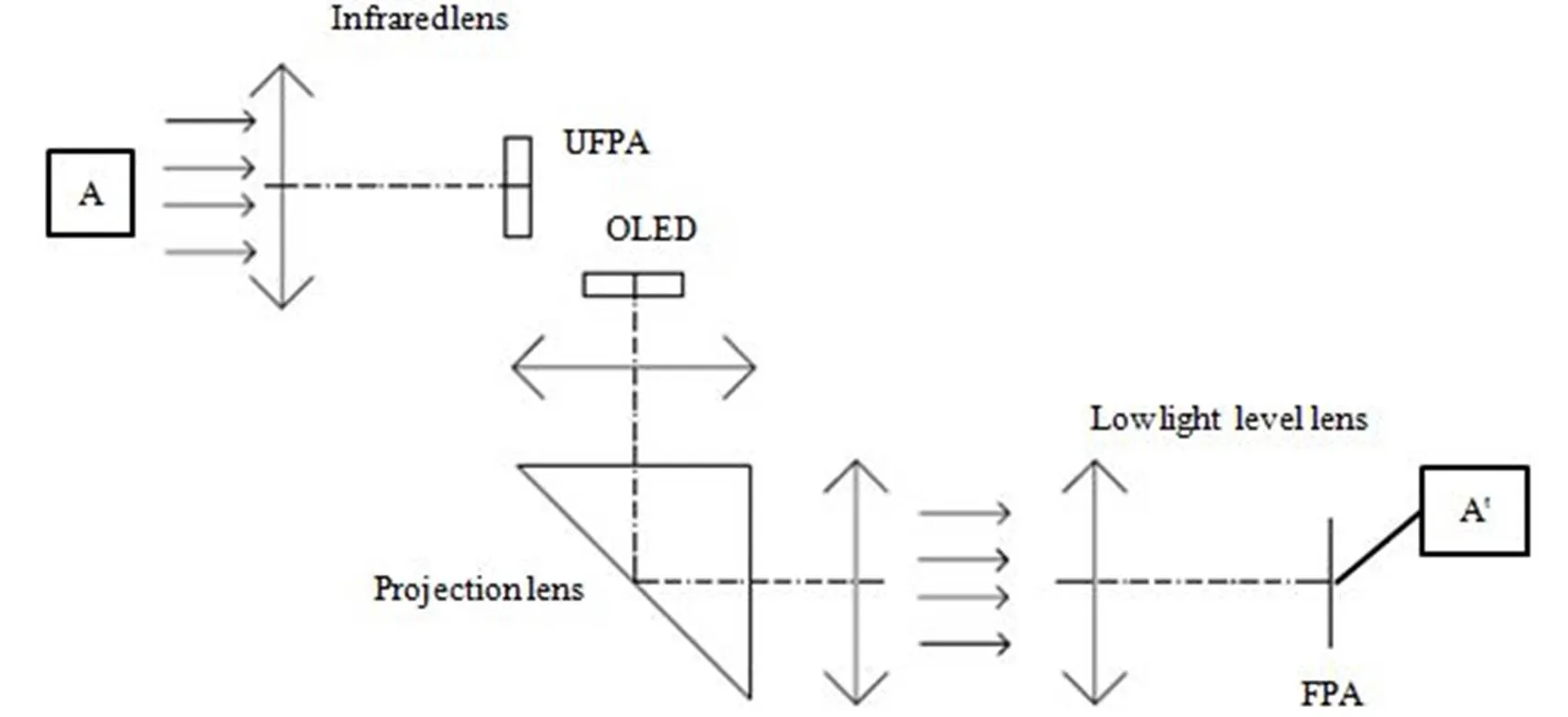
圖11 光軸無偏差時融合成像示意圖
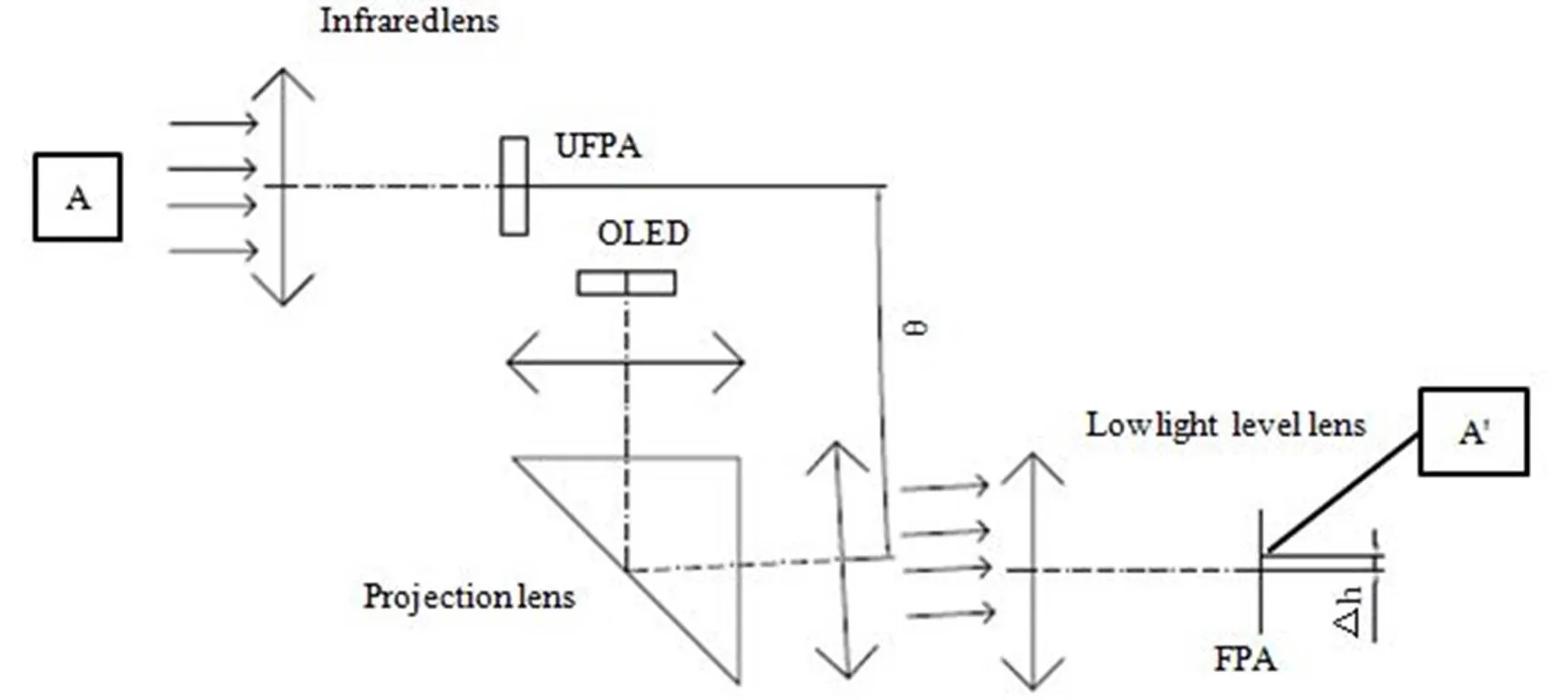
圖12 光軸有偏差時融合成像示意圖
微光頭盔成像基于真空電子學的原理,所成圖像是連續的。人眼在明亮條件下的分辨極限為1¢~3¢,則微光圖像與紅外圖像配準誤差對人眼張角不大于1¢~3¢時,圖像配準效果較好。由于微光頭盔為1×系統,即投影物鏡以偏角投射的光線經微光頭盔后也以同樣的角度投射到人眼。故懸掛式紅外夜視儀的紅外物鏡光軸與投影物鏡光軸偏差不應大于1¢~3¢。
3.3 紅外物鏡與投影物鏡畸變分析
紅外物鏡與投影物鏡組成的1×系統外掛到微光頭盔上,此外掛的精度很低,即投影物鏡的中心可能與微光頭盔的中心重合,也可能具有一定角度的偏差。微光頭盔以視場中心為起點,不同視場位置對應的畸變值也不相同。如果以微光頭盔中心視場為基準校正懸掛式紅外夜視儀的畸變,使其與微光頭盔的畸變相匹配,則懸掛的懸掛式紅外夜視儀光軸與微光頭盔光軸具有一定角度偏差時,由于畸變值的差異,造成配準精度降低、融合圖像模糊。
為了避免此配準誤差,則需要紅外物鏡與投影物鏡組成的1×懸掛式紅外夜視儀的畸變在各個視場點處畸變相互抵消,即紅外物鏡與投影物鏡組合為一個無畸變的1×望遠鏡系統,如表2所示。

表2 紅外物鏡、投影物鏡在相同視場點處的畸變
4 公差分析
4.1 紅外物鏡公差分析
紅外物鏡完成設計后為了滿足后續的零件加工和裝調需要對光學零件和對應的結構件分配一定的公差,對應的公差分配見表3。在進行公差分析時以焦面位移作為補償(補償量±0.5mm)、以幾何平均傳遞函數(MTF)為評價依據、以正態分布概率方式分配實際裝配及加工時的公差值,并采用蒙特卡羅分析方法模擬200套加工裝配后的虛擬鏡頭,分析虛擬鏡頭的MTF變化,依此判斷實際鏡頭的成像效果。
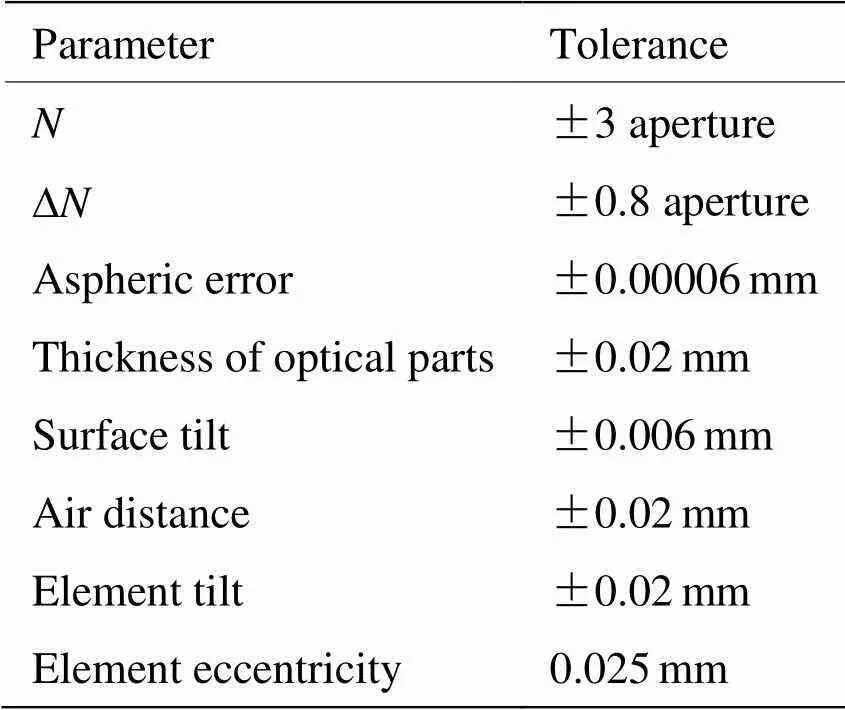
表3 紅外物鏡公差
如表4所示,通過對200套虛擬鏡頭傳遞函數的分析,約有90%的虛擬鏡頭在中心頻率處的傳遞函數的對比度為0.219,已經能滿足設計觀察的需要,即表3所分配的公差合理且滿足要求。
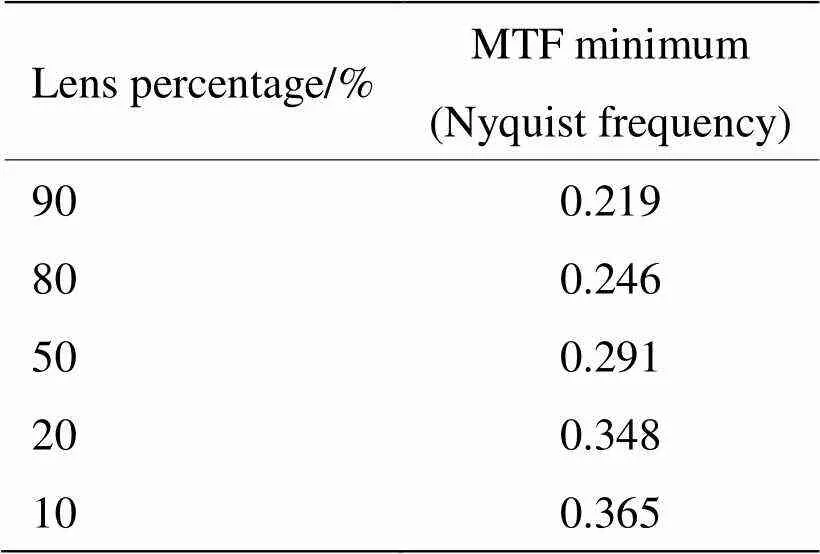
表4 紅外物鏡公差分析結果
4.2 投影物鏡公差分析
同上5.1所述,投影物鏡完成設計后為了滿足后續的零件加工和裝調需要對光學零件和對應的結構件分配一定的公差,對應的公差分配見表5。在進行公差分析時以焦面位移作為補償(補償量±0.5mm)、以幾何平均傳遞函數(MTF)為評價依據、以正態分布概率方式分配實際裝配及加工時的公差值,并采用蒙特卡羅分析方法模擬200套加工裝配后的虛擬鏡頭,分析虛擬鏡頭的MTF變化,依此判斷實際鏡頭的成像效果。
如表6所示,通過對200套虛擬鏡頭傳遞函數的分析,約有90%的虛擬鏡頭在40lp/mm頻率處的傳遞函數的對比度為0.603,已經能滿足設計觀察的需要,即表5所分配的公差合理且滿足要求。
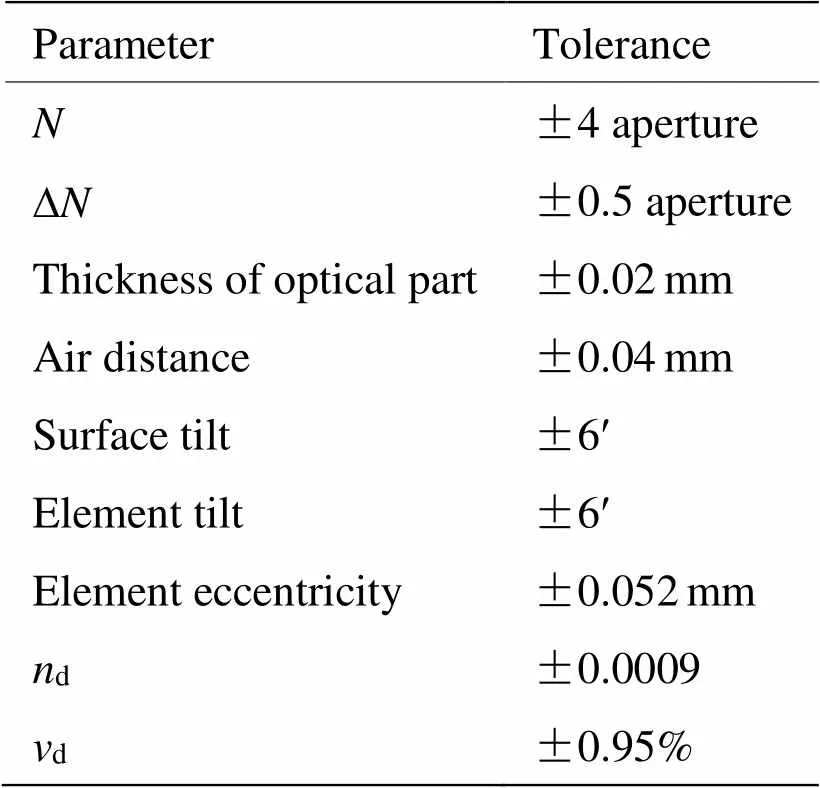
表5 投影物鏡零件公差
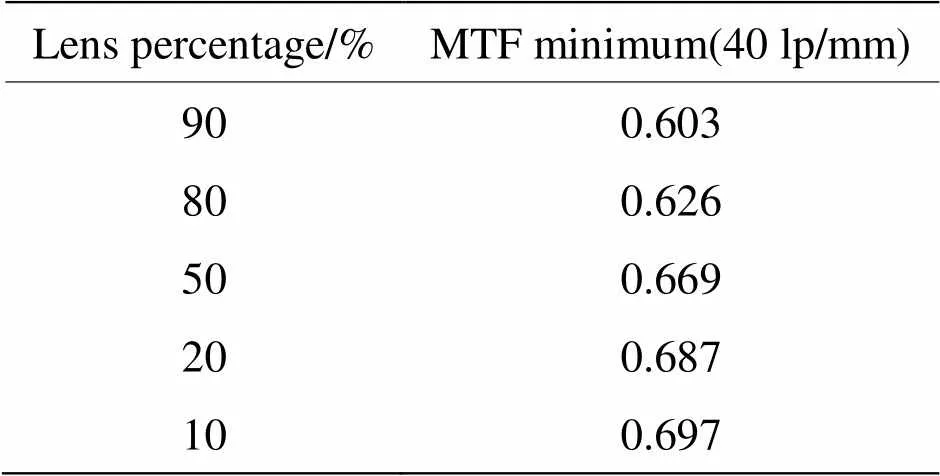
表6 投影物鏡公差分析結果
5 結論
本文介紹了基于微光頭盔觀察、懸掛式紅外夜視儀的設計方案、設計方法及融合圖像的配準精度。通過對懸掛式紅外夜視儀技術方案的分析,其技術方案成熟可行。針對懸掛式紅外夜視儀的特殊使用方式,分析了引起微光與紅外圖像失配的因素并提出相應的解決或消除措施,以達到比較好的光學式圖像融合的效果。通過對懸掛式紅外夜視儀的光學仿真,為其他進行夜視儀設計和圖像融合研究的相關人員提供參考。
[1] 任桃桃, 邱亞峰. 頭盔式單目低照度CMOS夜視儀結構設計與分析[J]. 紅外技術, 2016, 38(8): 653-658.
REN Taotao, QIU Yafeng. Structure design and analysis of monocular low illumination CMOS night vision device for helmet[J]., 2016, 38(8): 653-658.
[2] 白瑜, 程習敏, 馮成, 等. 拼接式全景頭盔紅外夜視儀系統設計[J]. 光電技術應用, 2014, 29(1): 26-31.
BAI Yu, CHENG Ximin, FENG Cheng, et al. Design of segmented panoramic helmet-mounted infrared night vision[J]., 2014, 29(1): 26-31.
[3] 王思博. 三通道微光夜視儀光學系統設計[D]. 長春: 長春理工大學, 2014.
WANG Sib. Optical of Three Channels of Night Vision Instrument[D]. Changchun: Changchun University of Science Technology, 2014.
[4] 史訓豪. 夜視儀在單兵觀瞄系統中的應用[J]. 科技風, 2019(10): 18-19.
SHI Xunhao. Application of night vision device in single soldier observation and aiming system[J]., 2019(10): 18-19.
[5] 李力, 李訓牛. 直升機飛行員頭盔夜視系統視覺及舒適性優化技術分析[J]. 紅外技術, 2017, 39(10): 890-896.
LI Li, LI Xunniu. Analysis of optimization technology for a night vision system for helicopter pilots with special focus on the visual characteristics and comfort[J]., 2017, 39(10): 890-896.
[6] 許為. 航空夜視鏡的人機工效學問題[J]. 國際航空, 1991(12): 52-53.
XU Wei. Ergonomic problems of aerial night vision goggles[J]., 1991(12): 52-53.
Optical System Design of Suspended Infrared Night Vision Based on Low Light Level Helmet Observation
SUN Aiping,HU Jianchuan,AN Changliang,LI Xunniu,WANG Chenyue,GONG Yangyun,SONG Yuyu
(..,650223,)
Helmet night vision systems are developed from single-band to multi-band image fusion. In this study, we analyzed the technical program and image registration accuracy based on low-light-level helmet observation and a hanging infrared night vision device. Optical simulation analysis was also conducted. First, we analyzed the working mode of the combination of hanging infrared night vision and low-light-level helmet, as well as the design scheme of image rotation and circular field of view. Second, according to the design index of hanging infrared night vision, optical simulation of an infrared lens and projection lens was carried out. Third, the image registration accuracy was analyzed from three viewpoints: suspension accuracy, optical axis consistency, and distortion. Finally, according to the simulation results and image registration accuracy analysis, a technical scheme based on low-light-level helmet observation and suspended infrared night vision is feasible and can achieve the targeted effect.
projection lens, infrared lens, image fusion, image registration, suspended, infrared night vision
O439
A
1001-8891(2022)12-1278-09
2020-07-03;
2021-02-24.
孫愛平(1980-),男,碩士,高級工程師,研究方向:紅外整機系統設計及光學系統設計。E-mail:50973525@qq.com。
胡健釧(1991-),男,碩士,工程師,研究方向:紅外整機系統設計及軟件設計。E-mail:hjc200930@ssina.com。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
數學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(2021年4期)2021-07-13 08:58:28
無線電通信技術(2021年3期)2021-06-08 03:33:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38
