考慮駕駛風格的路徑跟蹤控制方法
2022-12-25 12:43:50秦增科趙一杰
重慶理工大學學報(自然科學) 2022年11期
馬 躍,郭 烈,秦增科,趙一杰
(大連理工大學 汽車工程學院, 遼寧 大連 116024)
0 引言
隨著車輛智能化水平的提高,車輛的主動控制和高級駕駛輔助系統需要與人類駕駛員無縫共享控制,控制器的有效性取決于匹配特定駕駛員的駕駛風格[1]。
目前考慮駕駛員風格的軌跡跟蹤已有相關研究,Jiang等[2]建立模型預測方法的駕駛員跟蹤模型,跟蹤熟練駕駛員的參考軌跡,優于單點預瞄、β樣條曲線跟蹤效果,但實驗人數很少。Wang等[3]建立可調轉向比的轉向系統,根據駕駛員的路徑自適應調節轉向比,提高跟蹤性能。
駕駛風格的識別方法可分為問卷調查[4-5]、無監督學習識別和有監督學習識別[6-7]。郭烈等[8]對比了駕駛風格分類與辨識常見方法的特點,并研究在實際環境、硬件仿真、真實數據集上的驗證方法。鄭亞奇[9]結合隱馬爾科夫模型(HMM)與支持向量機(SVM)方法搭建具有時序和分類特性的混合識別模型,比單獨的HMM、SVM辨識率高。有監督識別方法主觀因素太強,識別類別有限,不能有效挖掘數據潛在信息。
駕駛風格會受情緒影響發生不定期變化,駕駛風格實時評測模型有待開發[10]。針對這一問題,本文提出一種駕駛風格在線識別系統,用于路徑跟蹤控制。首先,搭建駕駛員在環的實驗平臺,采集駕駛員轉向特性參數,提取特征值;然后,對駕駛風格進行聚類、離線識別和在線識別;最后,將駕駛風格的差異考慮在路徑跟蹤控制中,提高智能車輛的駕駛員適應性。
1 駕駛模擬系統的搭建與數據采集
1.1 實驗平臺
基于駕駛模擬器采集駕駛員的轉向特征數據,實驗系統可分為硬件系統和軟件系統。硬件系統包括顯示器、羅技G29設備、工作站、駕駛員座椅和設備框架。工作站配置如表1所示。
表1 工作站配置
實驗平臺的結構如圖1所示。采用Prescan軟件搭建采集駕駛員轉向特性的駕駛場景,在Simulink中將虛擬駕駛環境、車輛動力學和羅技G29模塊連接起來,駕駛員根據當前虛擬道路場景、車輛動力學狀態及時進行轉動方向盤、踩踏板等操作,實現車輛的實時動力學操作和數據采集。
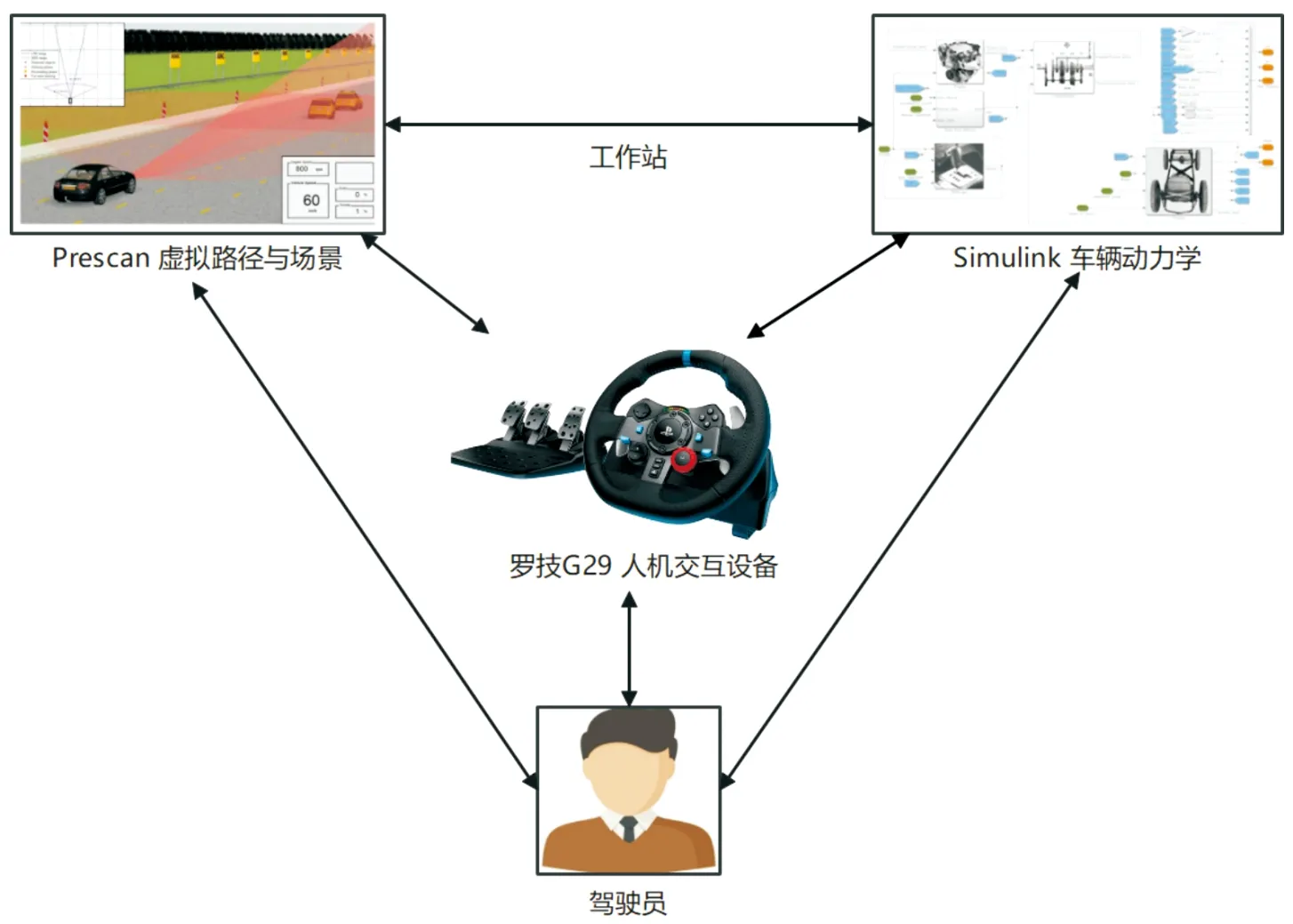
圖1 實驗平臺結構示意圖
1.2 數據采集與處理
在整個道路網中,交叉口是車輛與車輛集聚、發生轉向和疏散的必經之地。它是重要的交通樞紐,在整個交通系統的安全中起著至關重要的作用[11]。其中十字路口是交叉口中最為復雜的場景之一,駕駛員特性在道路交叉口存在的差異會導致交通流擁堵和交通事故等問題[12],而且在十字路口工況駕駛員的轉向角一般較其他路口大,轉向操作復雜且頻繁,能夠充分體現駕駛員之間的個性化差異。
參考二級公路標準[13]設計實驗道路為雙向四車道,車道寬度為3.5 m、路肩寬度為0.75 m。參考城市道路標準[14-15]設置實驗道路曲率與標志標線。十字路口場景見圖2,駕駛員視野見圖3。實驗場景為晴天,道路兩側間隔有樹木和建筑物,實驗車型選擇為Toyota Prius Sedan,擋位設為自動擋。

圖2 十字路口場景

圖3 駕駛員視野
選取25位具有實際駕駛經驗的駕駛員進行實驗,在實驗前保證充足的睡眠和良好的精神狀態,實驗人員的駕齡分布見表2,平均駕齡約為6.4 a。在正式采集數據之前,安排每名駕駛員在駕駛模擬器上熟悉實驗場景與道路,駕駛員完全按照自己的駕駛風格和習慣進行轉彎,直到能夠順利通過所有的彎道后,開始正式實驗。每人熟悉駕駛模擬器大約需要0.5 h。除十字路口轉彎之外,為避免路況的單一,較為全面地反映駕駛員的轉向駕駛風格,實驗道路還設置了大角度轉向彎道,實驗道路共包含6個轉彎、4個十字路口彎道和2個大角度彎道,左、右轉各3次,每次實驗有固定的起點和終點,每人重復實驗3次,每次實驗大約需要6 min。
表2 駕駛員駕齡分布
駕駛員在十字路口的轉向特性反映在轉向時的操作輸入和車輛狀態參數上,例如,保守型的駕駛員在轉向時喜好輸入較小的方向盤轉角、轉彎速度較小;激進型的駕駛員在轉向時喜好輸入較大的方向盤轉角、轉彎速度較大;正常型駕駛員在轉向時輸入的方向盤轉角和轉彎速度在兩者之間。此外,方向盤轉向角速度和車輛的橫擺響應狀態也可以反映駕駛員的駕駛風格。因而,本實驗選擇駕駛員轉彎時方向盤轉角峰值、對應時刻的轉向速度、轉彎的轉向角速度峰值和車輛橫擺角速度峰值作為駕駛員轉向特征參數。分別提取體現駕駛風格的轉向特征參數,如圖4所示,提取特征值的過程中需要剔除異常值,最終得到左右轉彎有效數據共436組。
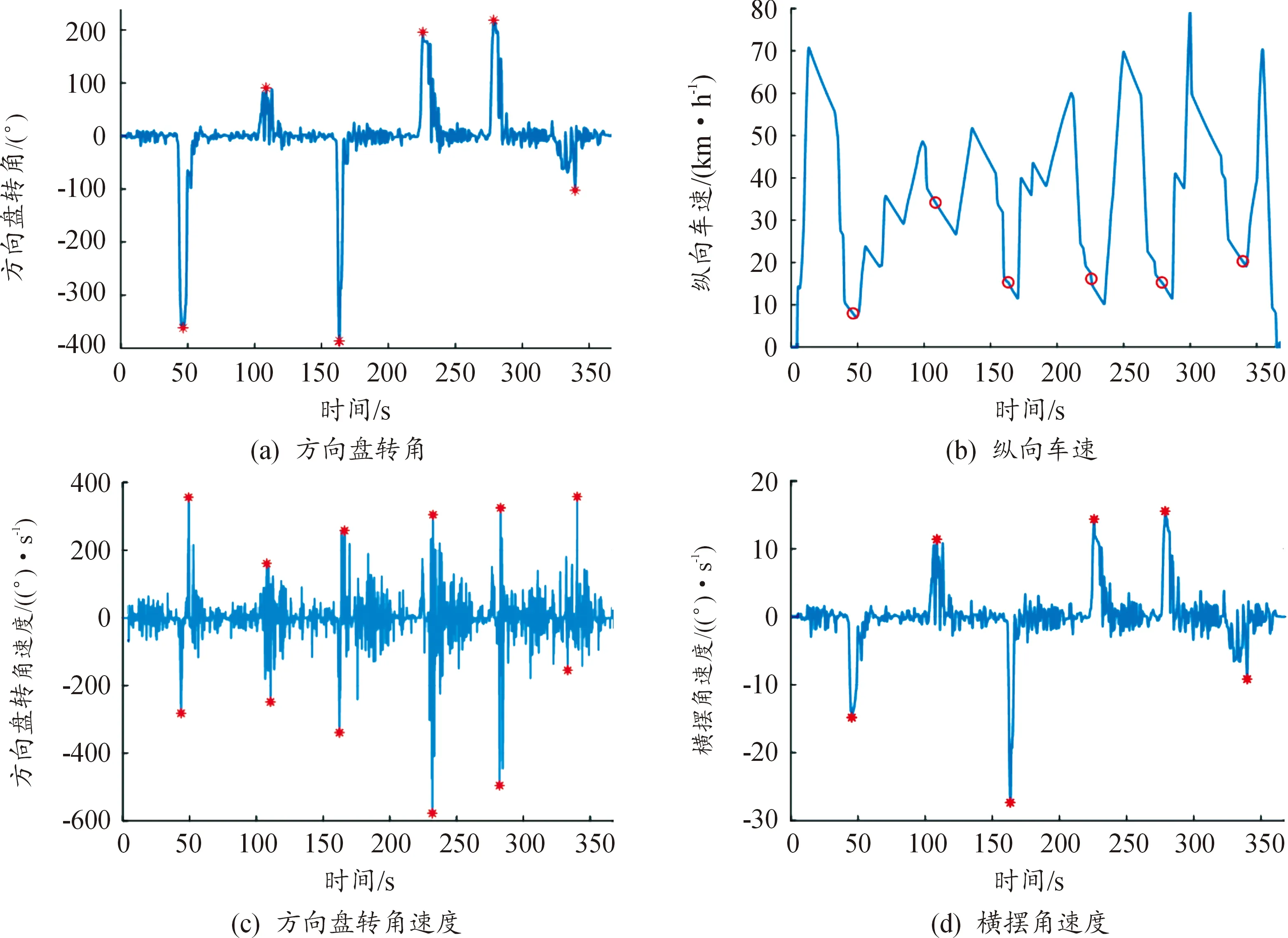
圖4 轉向實驗數據曲線
2 駕駛風格的聚類與識別
駕駛風格無法依靠客觀信息直接得到,通過貼標簽的方式給定主觀因素較強,適合采用無監督學習識別方法。在識別駕駛風格前首先需要將駕駛轉向特性數據聚類,得到駕駛風格標簽。
2.1 駕駛風格聚類
常見的聚類方法有K均值聚類(K-means clustering,K-means)、模糊C均值聚類(fuzzyC-means, FCM)、高斯混合模型的最大期望聚類等。FCM是一種柔性的模糊劃分,更適合劃分駕駛員風格類型,FCM是用隸屬度確定每個數據點屬于某個聚類的程度的一種聚類算法,主要思想是把n個向量xi(i=1,2,…,n)分為C個模糊組,求出每組的聚類中心,使非相似性指標的價值函數達到最小。
在進行聚類前,為了消除各個特征值的量綱和數量級的影響,需要將經過處理的轉向特征數據進行均一化處理,統一化為0~1范圍的數。聚類數的確定綜合目前駕駛員特性聚類方面的研究,主要將駕駛員特性分為2~5類[16-18]。本文從感性認知和實際的角度出發,將駕駛員風格分為3類:激進型、正常型和保守型。采用FCM方法得到的聚類結果見表3,從提取得到的所有轉向片段數據來看,彎道的聚類結果如圖5所示,數量比例約為1∶1.52∶1.12。
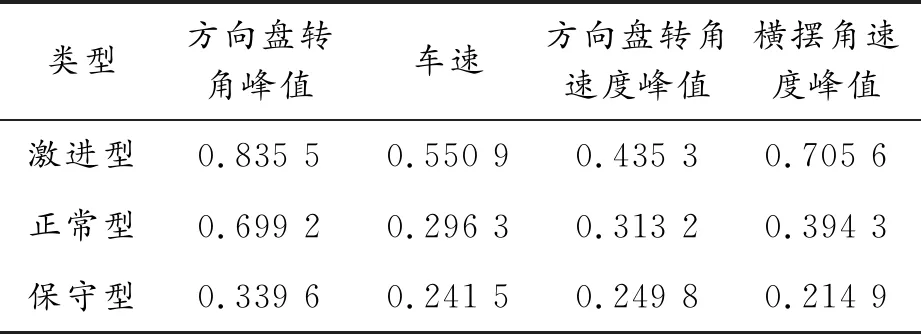
表3 聚類結果
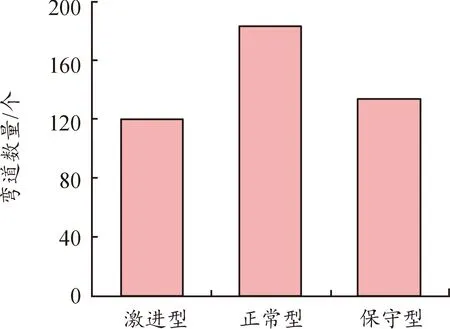
圖5 彎道聚類結果
從聚類結果中可以看出,代表駕駛風格的參數方向盤轉角峰值、車速、方向盤轉向角速度峰值和橫擺角速度峰值,無論哪一個特征值,聚類中心均滿足激進型>正常型>保守型的規律,說明聚類中心是可靠的,激進型的駕駛員偏向打出較大的方向盤轉角,轉向時保持較高的車速,有較大的方向盤角速度,車輛的橫擺角速度較大,保守型的駕駛員則恰恰相反。
由于駕駛風格是駕駛員在某一段時間內體現出的整體駕駛偏好或風格,所以統計同一駕駛員在轉彎處的所有類型,可以得到此駕駛員的類型,部分結果如表4所示。確保每名駕駛員的總轉彎數量不少于10次,按百分比最大的類型作為該駕駛員最終的類型,最終得到激進型駕駛員6名、正常型駕駛員11名、保守型駕駛員8名。
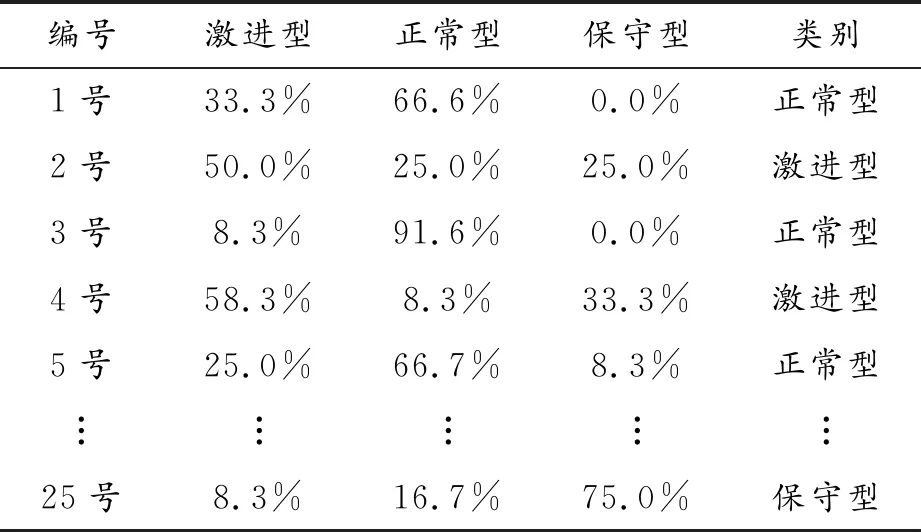
表4 駕駛員風格聚類結果
2.2 駕駛風格離線識別
隨著智能識別算法在車輛系統上的深度融合,有必要建立一個基于轉向特性的駕駛風格識別模型,搭建轉向特征參數與駕駛風格之間的非線性對應關系模型。當提取到駕駛員轉向特征參數時,駕駛風格識別模型可以預測出駕駛員的類型。
選擇BP神經網絡作為駕駛風格離線識別方法。BP神經網絡的輸入層和輸出層的節點數由輸入和輸出數據的維數決定,將激進型、正常型、保守型駕駛員序號分別設為1、2、3,BP神經網絡為4輸入1輸出,如圖6所示,輸入量為駕駛員轉彎時方向盤轉角峰值、對應時刻的轉向速度、轉彎的轉向角速度峰值和車輛橫擺角速度峰值,輸出量為駕駛風格。BP神經網絡通過輸入數據不斷調整模型網絡的權值,實現輸入層與輸出層之間的映射,學習識別駕駛風格。
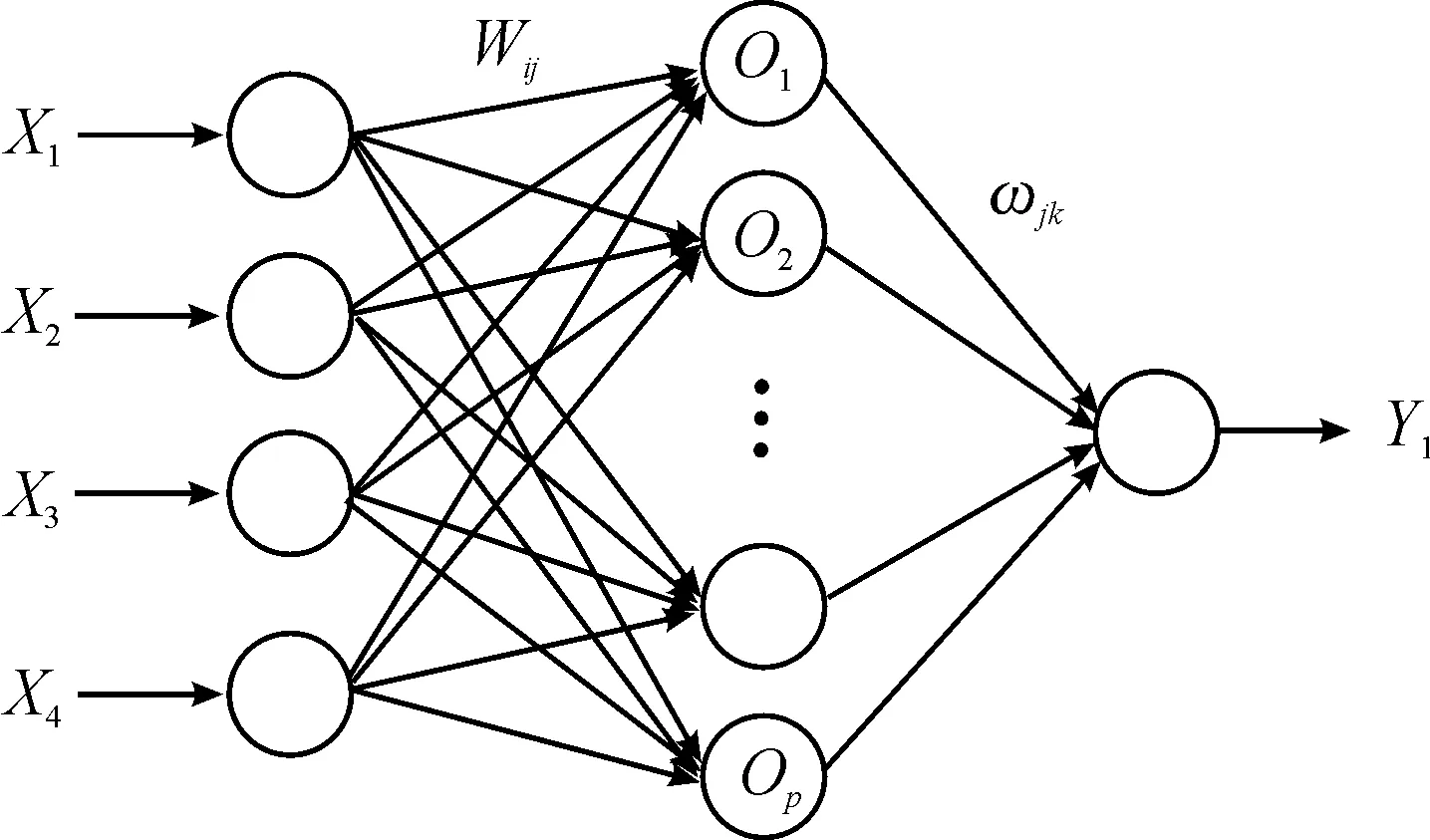
圖6 BP神經網絡結構示意圖
由Kolmogorov定理可知,單隱含層的BP網絡可以通過設置足夠多的節點以任意精度逼近任何非線性連續函數。因此隱含層設置為單層,一般用式(1)的經驗公式確定。
(1)
式中:nh為隱含層節點數,ninput為輸入層神經元數,noutput為輸出層神經元數,α為常數,屬于1~10。所以隱含層節點數范圍為[4,12]。為了選擇最優的隱含層節點數,神經元個數分別取為4、5、6、7、8、9、10、11、12,隱含層神經元節點數與均方誤差的關系如圖7所示,隱含層節點數為12時,網絡預測的均方誤差最小,因而網絡的隱含層節點數設置為12。

圖7 神經元節點數與均方誤差的關系
BP神經網絡輸入層的傳遞函數為tansig,輸出層傳遞函數為purelin,訓練函數為traincgp,網絡學習率為0.01,隨機選取436組有效數據的85%進行訓練,訓練均方誤差如圖8,15%樣本作為測試集,最終網絡預測結果如圖9,駕駛風格識別精度達到98.48%。
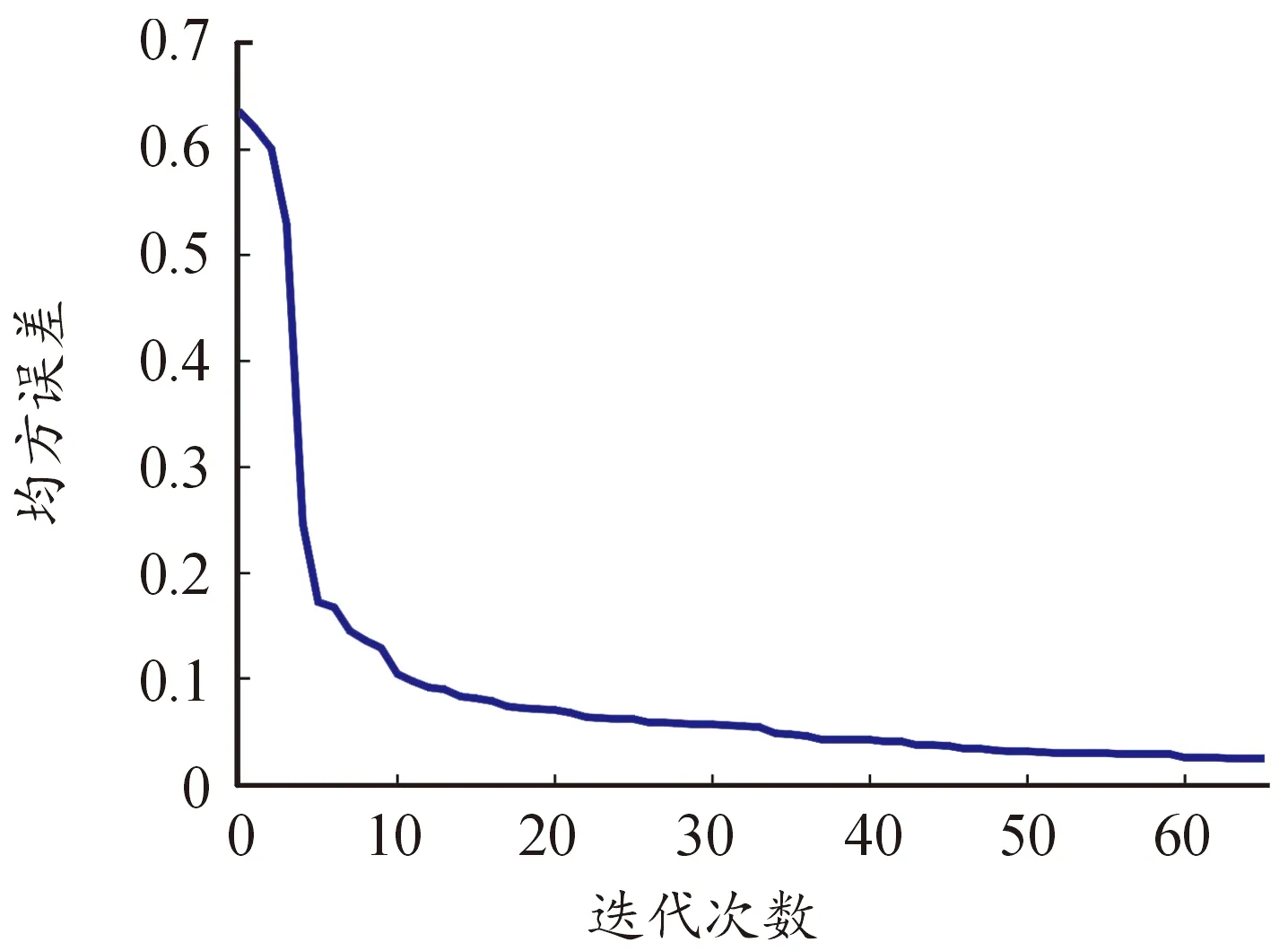
圖8 BP神經網絡均方誤差
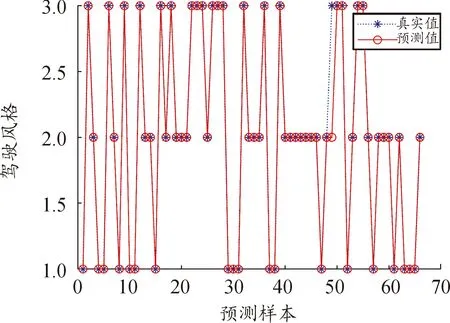
圖9 BP神經網絡預測輸出
2.3 駕駛風格在線識別
駕駛風格離線識別依賴預先得到的數據集,不能應用于風格未知的駕駛員,因此本文建立駕駛風格在線識別系統,根據駕駛員轉向操作在線得出駕駛員風格類型,為建立個性化的駕駛輔助系統奠定基礎。
圖10展示了駕駛風格在線識別流程。駕駛模擬采集系統實時采集駕駛員輸入及車輛數據,系統在線提取轉向特性的特征值,隨后BP神經網絡經過離線樣本訓練,在線辨識出駕駛員風格類型,對轉彎處的駕駛風格進行概率統計,若識別率滿足要求則輸出駕駛風格。
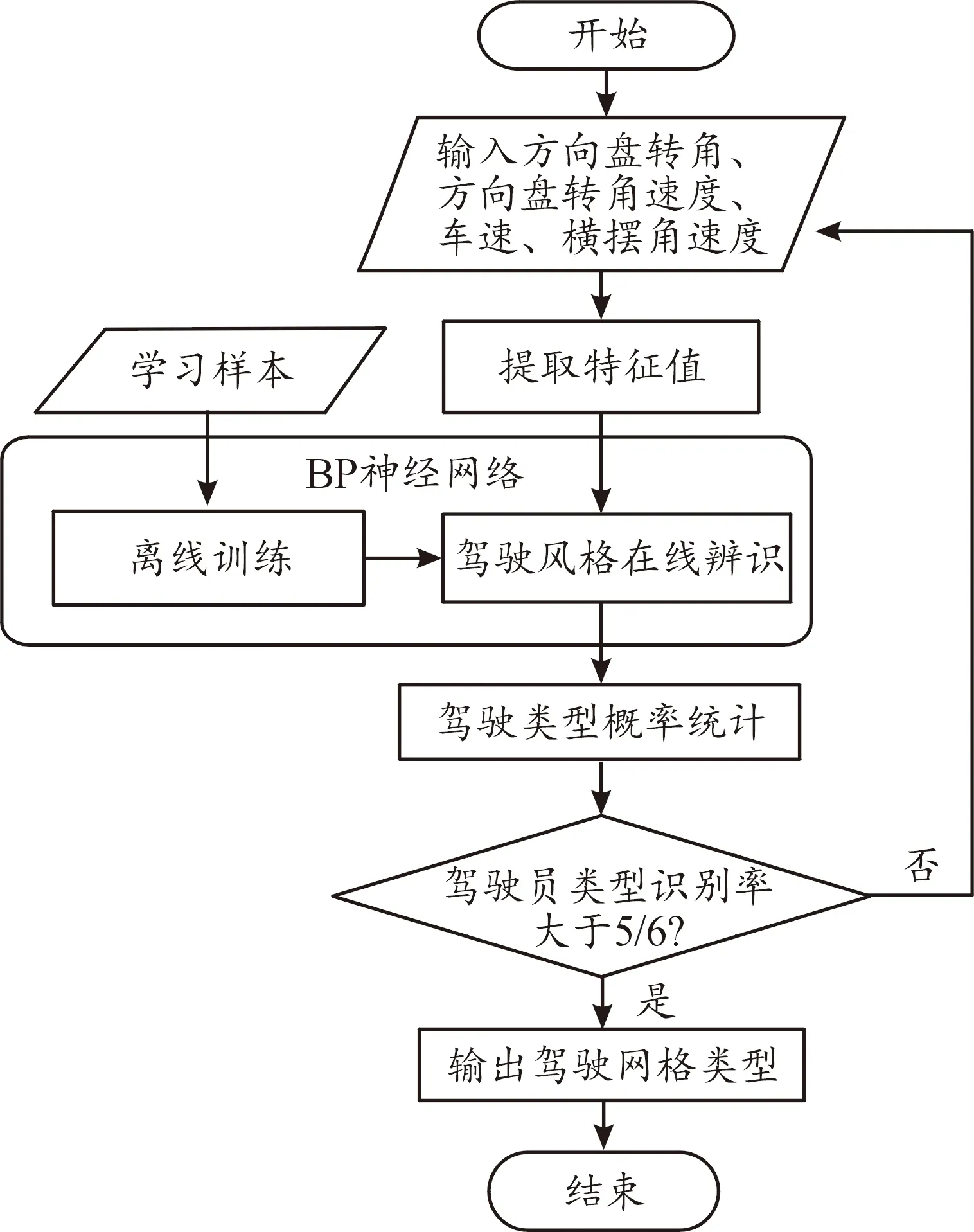
圖10 駕駛風格在線識別流程框圖
相較于駕駛風格離線識別系統,在線識別系統將特征值提取模塊、BP神經網絡識別模塊嵌入數據采集系統中,實現數據從采集到在線識別的全過程。BP神經網絡具有強非線性,能夠找到輸入量與輸出量之間的復雜的映射關系,使BP神經網絡同樣適用于非線性的在線識別系統。
設計的駕駛風格在線識別人機交互界面(human machine interface,HMI)如圖11所示,實時顯示當前車速、發動機轉速、制動百分比、加速百分比和識別出的駕駛風格,Driver Type為1表示激進型。
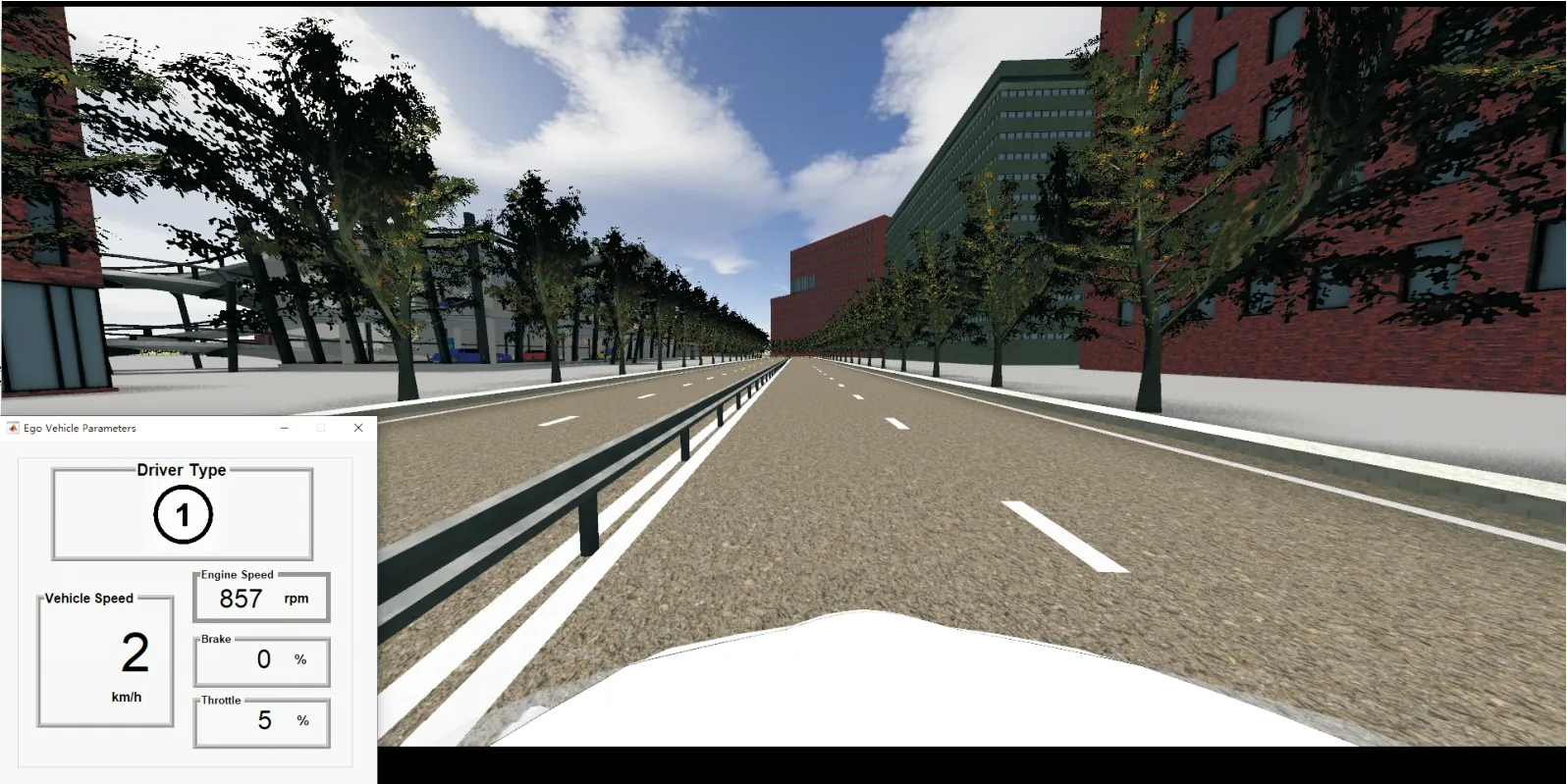
圖11 實時顯示界面
選取之前未參與過試驗的駕駛員a在駕駛模擬采集平臺上進行駕駛風格識別試驗,試驗流程參照圖10進行。為充分證明識別系統的有效性,每個駕駛員跑2次實驗,駕駛員a統計的駕駛風格在線識別結果如圖12所示,每個彎道識別當前的駕駛員類型,概率統計后得到整體駕駛風格類型。均方誤差如圖13,BP神經網絡的均方誤差迅速下降并趨于平穩。
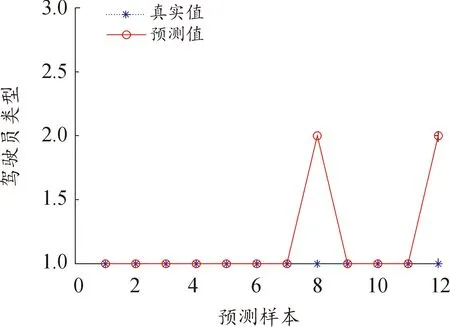
圖12 在線識別結果
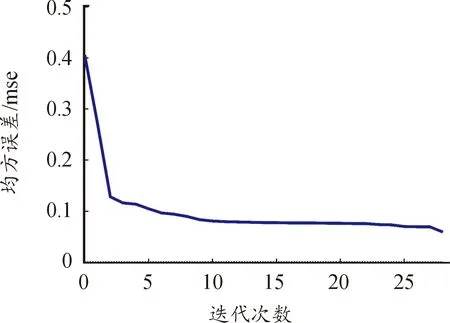
圖13 均方誤差
3 考慮駕駛風格的路徑跟蹤控制
3.1 車輛動力學模型
在實現駕駛員駕駛風格在線識別的基礎上,考慮建立適應駕駛風格的路徑跟蹤控制策略,提高控制器的個性化水平。采用線性二自由度模型作為車輛動力學模型,具有實時性好、控制效果優的特點。線性二自由度車輛模型如圖14所示,坐標系oxyz為車身坐標系,車輛質心為坐標原點o,x軸為車輛縱軸,坐標系OXY為固定于地面的慣性坐標系,Flf、Flr為前后輪胎受到的縱向力,Fcf、Fcr為前后輪胎受到的側向力,Fxf、Fxr為前后輪胎受到的x方向的力,Fyf、Fyr為前后輪胎受到的y方向的力。
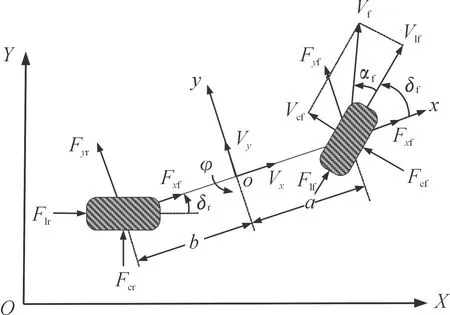
圖14 車輛二自由度模型示意圖
忽略懸架的影響,只考慮車輛側向運動和橫擺方向的運動,其運動微分方程如下:
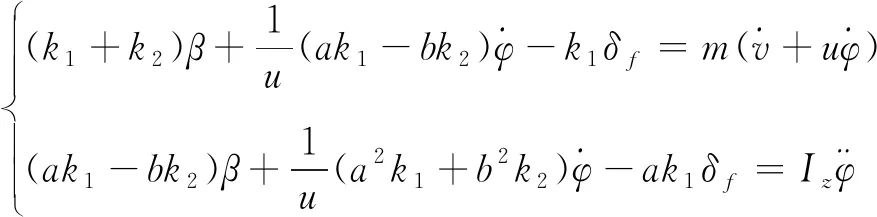
(2)
式中:k1、k2為前、后軸側偏剛度;β為質心側偏角;δf為前輪轉角;φ為橫擺角;Iz為轉動慣量;a、b為前、后軸到質心的距離;u、v為質心速度在ox軸和oy軸上的分量。
結合Pacejka提出的魔術公式輪胎模型,整理得到非線性動力學模型:
(3)
3.2 考慮駕駛風格的路徑跟蹤控制方法

根據文獻[19]將模型預測控制問題轉化為二次規劃問題,目標函數為:
(4)
式中:η為車輛當前時刻運動狀態量;ηref為車輛未來時刻期望路徑信息量;Δu為車輛方向盤轉角增量;Np為預測時域;Nc為控制時域;ρ為權值系數;ε為松弛因子;Q和R為權重矩陣,第一項反映了對期望路徑的跟隨能力;第二項反映了路徑跟蹤對轉向平滑穩定的要求。
約束條件包括控制量約束、控制增量約束以及車輛動力學約束。參考實驗研究結果[20],質心側偏角約束設置為-12°<β<12°,輪胎側偏角設置為-2.5°<αf,t<2.5°。權重矩陣系數R反映了對前輪轉角控制增量的重視程度,不同類型的駕駛員對R的依賴程度不同。本文根據駕駛員風格的識別結果設置不同的約束條件,體現路徑跟蹤過程中的駕駛員差異。保守型駕駛員對Δu要求更嚴格以求解出偏小角度的轉向角,激進型駕駛員對Δu要求更寬松以求解出偏大角度的轉向角。
4 路徑跟蹤控制算法驗證
選取直線道路、正弦道路驗證2種類型駕駛風格路徑跟蹤的控制效果,其中預測時域、控制時域、權重矩陣系數、控制量約束以及控制增量約束分別見表5、表6。車輛仿真參數見表7。
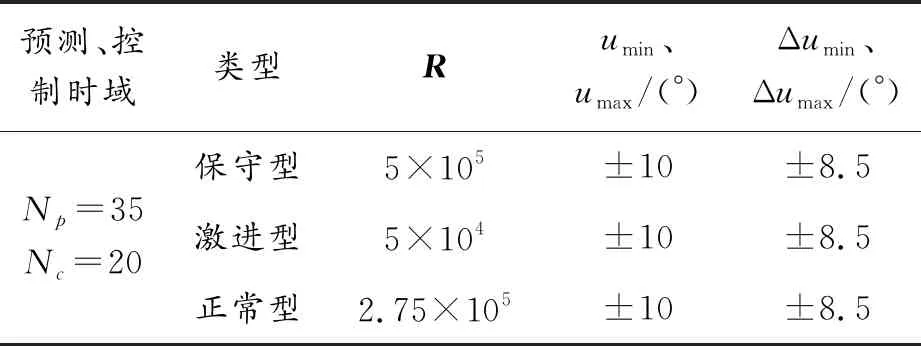
表5 直線道路參數
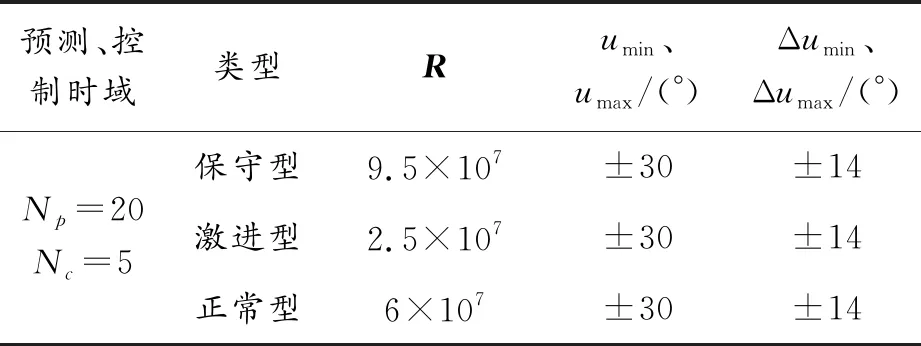
表6 正弦道路參數
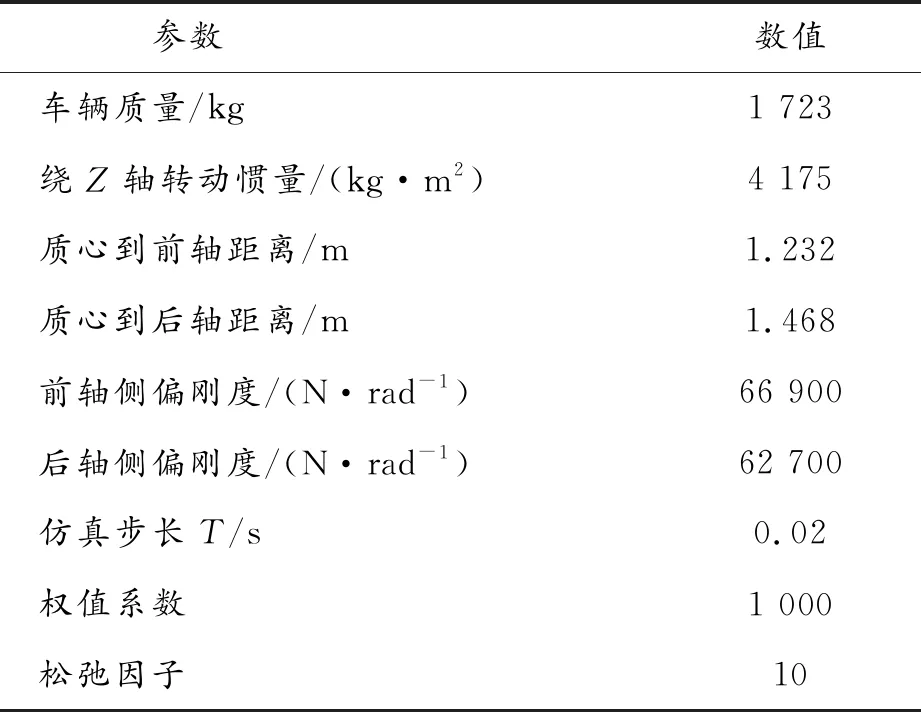
表7 車輛仿真參數
4.1 直線路徑
車輛從坐標原點出發以36 km/h初速度跟蹤軌跡y=1的直線軌跡,路面附著系數為0.8,仿真結果如圖15。
圖15(a)、(b)說明,3種跟蹤控制器都可以在有限時間內跟蹤參考軌跡,最大誤差小于0.01 m,激進型控制器最先到達參考軌跡。圖15(c)說明在跟蹤直線道路時,激進型跟蹤控制器的橫擺角速度波動最大,保守型跟蹤控制器的橫擺角速度波動最小,符合實際駕駛員的轉向特性,2 s內橫擺角速度均達到理想值。圖15(d)說明車輛前輪轉角均在約束范圍內,激進型跟蹤控制器的前輪轉角波動最大,與圖15(c)對應。圖15(e)說明前輪轉角增量在初始時刻波動較大,不同類型的跟蹤控制器波動幅度不同,這與施加的控制增量約束不同有關。
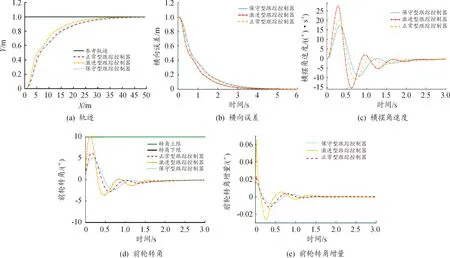
圖15 直線工況驗證仿真結果
4.2 正弦路徑
圖16中,車輛以20 km/h的初速度跟蹤y=0.5sin(0.1πx) 正弦路徑,路面附著系數μ=0.8,仿真結果如圖16。
從圖16(a)、(b)可以看出,3種跟蹤控制器均可以無延遲地跟蹤參考軌跡,最大跟蹤誤差小于0.16 m,能夠區分不同風格駕駛員的跟蹤特性,激進型跟蹤控制器跟蹤最緊密,保守型跟蹤控制器跟蹤最疏遠。從圖16(c)可以看出,不同跟蹤控制器的轉向時刻的橫擺角速度峰值不同,激進型跟蹤控制器峰值最大,但都在20(°)/s 范圍內。從圖16(d)可以看出,為了能夠有效跟蹤期望路徑,激進型跟蹤控制器單位時刻輸出的前輪轉角增量較大累加為較大的前輪轉角,保守型跟蹤控制器正好相反。圖16(c)~(d)輸出值在1.5 s內出現波動,是由于初始速度不為0,系統需要時間響應。
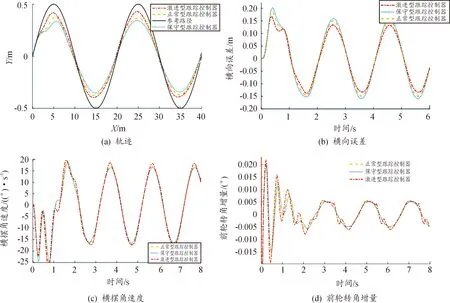
圖16 20 km/h 正弦路徑跟蹤仿真結果
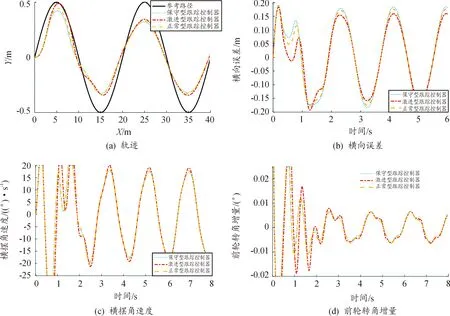
圖17 40 km/h正弦路徑跟蹤仿真結果
從圖16—17(a)、(b)的結果可知,隨著初始速度的增加,跟蹤路徑更加遠離期望路徑,跟蹤橫向誤差峰值由0.16 m增大到0.18 m。對比圖16—17(c)中結果,隨著車速的增加,橫擺角速度響應初始波動更大,達到穩定所需的時間更長,穩定后橫擺角速度峰值由18.5(°)/s增大到20(°)/s。對比圖16—17(d)可知,同一種類型跟蹤控制器輸出的前輪轉角控制增量隨車速增加而增大。
5 結論
通過采集駕駛風格特征數據,采用聚類方法得到完整的駕駛風格類型數據集,搭建了駕駛風格的在線識別系統。該識別系統能夠在駕駛員經過轉彎時在線提取駕駛員特征值,BP神經網絡預先對數據集進行離線訓練,能夠在線識別出每個彎道的駕駛員類型,最終輸出駕駛風格。該在線識別系統有助于建立個性化的駕駛輔助系統,有效提高駕駛舒適性。
將駕駛風格考慮在路徑跟蹤控制策略中,建立符合駕駛員個性化的路徑跟蹤控制方法,將路徑跟蹤控制器按照駕駛員的類型分為激進型、正常型和保守型3類,在保證跟蹤精度和穩定性的同時,能夠滿足不同駕駛員的路徑跟蹤需求,實現個性化駕駛。仿真試驗的結果表明:本文的路徑跟蹤控制方法能夠在短時間內有效跟蹤直線和正弦軌跡;同一工況下激進型跟蹤控制器最先跟蹤上參考軌跡,跟蹤誤差最小,保守型跟蹤控制器最后跟蹤上參考估計,跟蹤誤差最大,20 km/h正弦路徑跟蹤誤差穩定在0.16 m范圍內;同一種跟蹤控制器的跟蹤誤差、橫擺角速度、前輪轉角增量隨著車速的增大而增大,均在約束范圍內擺動,符合實際車輛的響應特性。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
汽車電器(2018年1期)2018-06-05 01:22:54
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
公民與法治(2016年4期)2016-05-17 04:09:26
