XB-70飛行器折疊機(jī)翼總體性能分析
2022-12-27 11:45:38劉瑜呂凡熹周進(jìn)
航空科學(xué)技術(shù) 2022年12期
劉瑜,呂凡熹,周進(jìn)
1.中國空間技術(shù)研究院錢學(xué)森空間技術(shù)實(shí)驗(yàn)室,北京 100094
2.中國航空研究院,北京 100012
提高飛行器的氣動效率一直是航空器研究的重點(diǎn)之一,并且隨著飛行器速域和空域的拓展,對氣動性能的要求也越來越高。傳統(tǒng)的固定翼飛行器,除了控制舵面外,總體氣動外形較為固定,只有在固定的飛行狀態(tài)(通常是巡航狀態(tài))下氣動性能才較優(yōu)。對于飛行速度和飛行高度有了極大擴(kuò)展的臨近空間高超聲速飛行器和水平起降空天飛機(jī)等,飛機(jī)起降和爬升階段的能量消耗占整個飛行剖面能量需求的比例顯著提高,這對飛行器在低速起降和爬升階段氣動性能的提升有了較為急切的需求[1]。同時,對于部分高速飛行器,為了滿足不同的任務(wù)需求(如偵察和打擊等),需要飛機(jī)具備不同的巡航狀態(tài),這要求飛機(jī)外形在不同的飛行速度和飛行高度上均具有較高的氣動效率。因此,改變飛機(jī)氣動外形以適應(yīng)不同的飛行工況,實(shí)現(xiàn)飛行性能全階段優(yōu)化的概念被提出,多項(xiàng)相關(guān)研究都表明,變體技術(shù)是提高飛行器氣動效率的有效途徑[2-3]。
相關(guān)研究表明[4],對軍用無人機(jī),通過改變機(jī)翼展弦比、機(jī)翼后掠角,可以大幅度增加航程30%以上,提高機(jī)動性能20%以上。對于民用飛機(jī),通過改變機(jī)翼彎度等手段,可以大幅提高飛機(jī)升阻比,改善燃油經(jīng)濟(jì)性,節(jié)省燃油20%以上,同時降低噪聲[5-6]。20 世紀(jì)60—70 年代,為了同時兼顧短距起降、亞聲速飛行、超聲速飛行等任務(wù)要求,發(fā)展了多種滿足服役要求的變后掠翼飛機(jī),如F-14、B-1B、圖-160等[7]。以上變后掠翼飛機(jī)和同時期的變體飛行器均采用結(jié)構(gòu)機(jī)構(gòu)方式來驅(qū)動變形,付出了極大的重量(質(zhì)量)、可靠性代價,只有部分變體飛行器的總體性能提升較為顯著,其中在性能收益方面獲得巨大優(yōu)勢的最著名的例子是發(fā)展于20世紀(jì)70年代,一種機(jī)翼翼尖可折疊的大型超聲速戰(zhàn)略轟炸機(jī)XB-70 Valkyrie[8]。
翼尖折疊可以用來擴(kuò)展飛機(jī)的翼展,改變飛行器在高低速度情況下的誘導(dǎo)阻力。同時相關(guān)文獻(xiàn)[9-10]認(rèn)為,當(dāng)翼尖向下折疊捕捉飛機(jī)產(chǎn)生的激波時,能夠增加超聲速飛行時的總升力,并且升力中心的變化將減少俯仰力矩的控制和修正。此外,翼尖向下折疊后增加了高速狀態(tài)下的靜穩(wěn)定性,相應(yīng)地可使垂尾設(shè)計(jì)面積顯著減小。本文主要對XB-70 飛行器的折疊機(jī)翼結(jié)構(gòu)進(jìn)行介紹,基于簡化后的XB-70整機(jī)外形,采用計(jì)算流體力學(xué)(CFD)方法進(jìn)行各典型狀態(tài)下的氣動特性仿真分析,研究折疊機(jī)翼的總體性能收益。
1 XB-70折疊機(jī)翼
由美國北美航空公司研制的XB-70 轟炸機(jī)于1964 年9 月首飛,并在第17 次飛行中達(dá)到Ma3 和21500m 的飛行高度。原型機(jī)共兩架,其中第二架也達(dá)到過飛行速度Ma3,但在某次飛行中與伴飛的F-104相撞而墜毀。由于隱身性能較差造成戰(zhàn)場生存性的不足,整個項(xiàng)目被下令停止。1969 年1 月,第一架XB-70 被送進(jìn)博物館。XB-70 轟炸機(jī)采用大后掠三角翼、遠(yuǎn)距鴨翼、無平尾、雙垂尾的氣動布局形式,如圖1所示。XB-70轟炸機(jī)總體數(shù)據(jù)見表1。

圖1 XB-70女武神[8]Fig.1 XB-70 Valkyrie[8]
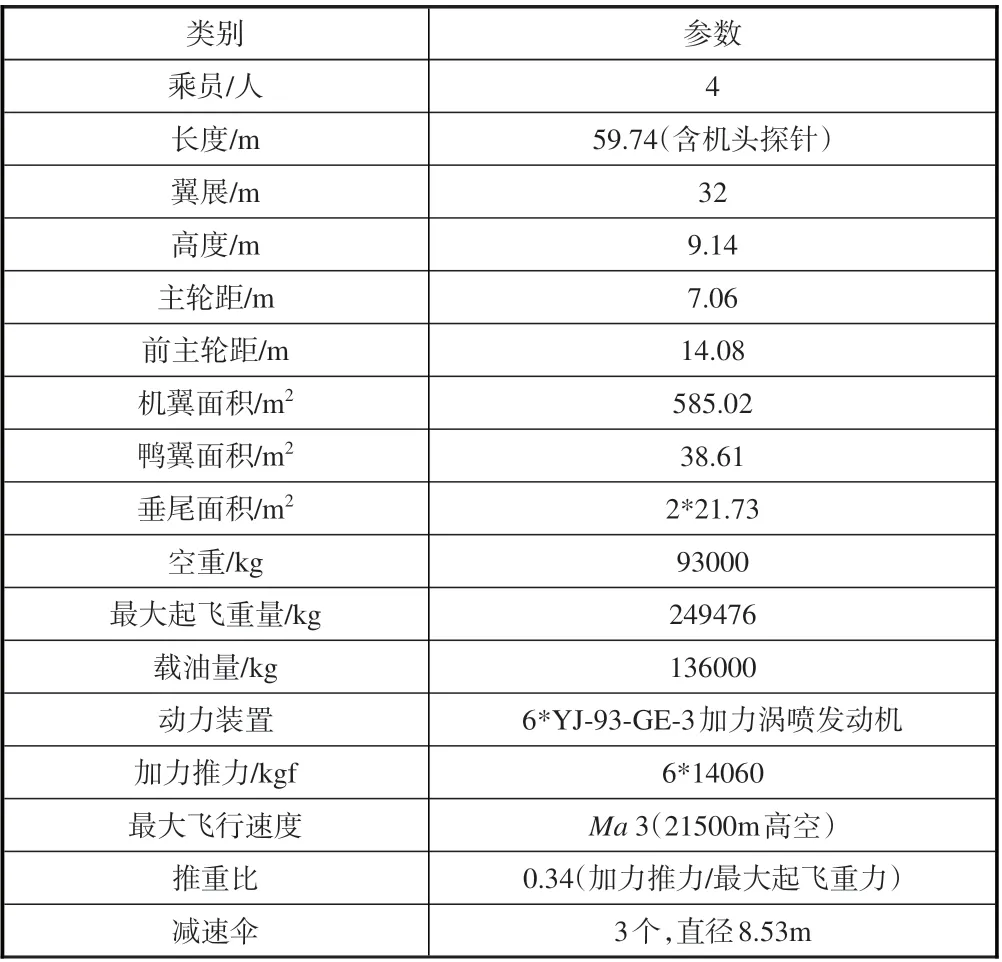
表1 XB-70總體參數(shù)Table 1 XB-70 overall parameters
XB-70最特別的設(shè)計(jì)來自翼尖可以折疊的機(jī)翼。翼尖與主翼以鉸接方式連接,在飛行過程中翼尖可以擺動,實(shí)現(xiàn)0°、垂下25°和垂下65°三種狀態(tài)。為了降低高速時的飛行阻力,機(jī)翼主翼段翼型相對厚度很小,如圖2 前視圖所示,翼尖與主翼連接位置的翼型相對厚度略有提高,以保證足夠的結(jié)構(gòu)高度用于連接和驅(qū)動設(shè)計(jì)。可折疊的翼尖尺寸參數(shù)見表2。

表2 折疊翼尖(單翼尖)幾何參數(shù)Table 2 Geometric details of the folding wingtip
折疊翼尖驅(qū)動鉸鏈和結(jié)構(gòu)機(jī)構(gòu)示意圖如圖3所示。中央驅(qū)動軸作為旋轉(zhuǎn)軸線為布置的6個驅(qū)動鉸鏈提供輸入,每一個驅(qū)動鉸鏈都連接到機(jī)翼的結(jié)構(gòu)上。兩個Vickers液壓驅(qū)動器位于機(jī)身內(nèi)部,用來給連接到每個翼尖的液壓驅(qū)動系統(tǒng)加壓。兩套驅(qū)動器只有一個泵用于主液壓網(wǎng)絡(luò),第二個作為發(fā)生液壓故障情況下的備份,達(dá)到增加系統(tǒng)冗余度的目的。整個翼尖驅(qū)動電機(jī)和驅(qū)動鉸鏈安裝在一個黑色的鎂釷整流罩中,從圖2 頂視圖可以看到,該整流罩從機(jī)翼前緣到機(jī)翼副翼根部覆蓋了整個鉸鏈旋轉(zhuǎn)軸線。

圖2 XB-70三視圖[11]Fig.2 XB-70 three views[11]
XB-70 上使用的鉸鏈與圖4 所示的寇蒂斯萊特(Curtiss-Wright)驅(qū)動鉸鏈類似,由兩級行星齒輪系統(tǒng)構(gòu)成,據(jù)報道,減速比可高達(dá)32000∶1,但如何通過小齒輪直徑、齒輪數(shù)量以及固定和移動齒輪的布置來實(shí)現(xiàn),目前尚無公開資料。從圖3(c)機(jī)體裝配過程中拍攝的照片中,通過操作人員和變速機(jī)構(gòu)的對比情況,估計(jì)翼梢驅(qū)動鉸鏈相當(dāng)于邊長為30cm 的立方體。材料主要采用H-11 鋼,室溫密度為7.80g/cm3,假設(shè)減速箱密度比為30%~50%,那么重量估計(jì)為100~180kg。每一個翼尖有6 個減速裝置,因此,翼尖的變速箱總重量估計(jì)在840kg[9]。這種驅(qū)動鉸鏈給飛機(jī)帶來了巨大的尺寸和重量成本。但與此同時,由于機(jī)翼折疊帶來的橫航向穩(wěn)定性的增加可使垂直尾翼的面積相應(yīng)減少,因此重量成本需要統(tǒng)籌考慮。

圖3 XB-70可折疊翼尖驅(qū)動鉸鏈和結(jié)構(gòu)細(xì)節(jié)[11]Fig.3 XB-70 folding wingtip hinge motors and actuators details[11]

圖4 Curtiss-Wright動力鉸鏈(與XB-70上使用的類似)[11]Fig.4 Curtiss-Wright power hinge(similar to those used on the XB-70)[11]
2 建模仿真
本文依據(jù)公開的尺寸數(shù)據(jù)和XB-70 飛行器外形特點(diǎn)[12],采用CATIA 軟件對其外形進(jìn)行創(chuàng)建。由于無法獲得飛行器內(nèi)流道形狀特點(diǎn),同時為了便于仿真分析,對XB-70的發(fā)動機(jī)流道通路進(jìn)行了封閉并對整機(jī)外形進(jìn)行了簡化,如圖5所示。

圖5 XB-70飛行器CATIA模型(機(jī)翼下折65°)Fig.5 CATIA model for XB-70(65°downward angle)
針對機(jī)翼折疊在0°、25°和65°三種狀態(tài)下的全機(jī)進(jìn)行網(wǎng)格劃分。考慮到本文分析不涉及側(cè)滑情況,為了降低CFD仿真計(jì)算量,采用半模進(jìn)行網(wǎng)格劃分與仿真計(jì)算。以飛機(jī)整機(jī)長度為單位長度,仿真區(qū)域向上、下各拓展25倍為上、下邊界,向前拓展15 倍為前邊界,向后拓展30 倍為后邊界,向側(cè)邊拓展32.5倍為側(cè)邊界,仿真區(qū)域整體如圖6(a)所示。除對稱面采用對稱邊界條件之外,其余邊界均采用與需要模擬狀態(tài)一致的壓力遠(yuǎn)場邊界條件,飛行器表面設(shè)置為無滑移的絕熱壁面條件。仿真工況見表3。

表3 工況匯總表Table 3 Conditions for simulation
為了提升氣動仿真分析精度,對近壁面網(wǎng)格進(jìn)行加密處理,如圖6(b)所示,貼體網(wǎng)格y+值控制在30左右。從壁面網(wǎng)格向外側(cè)的增長比例控制在1.2 左右,整機(jī)采用非結(jié)構(gòu)網(wǎng)格,三種構(gòu)型的貼體網(wǎng)格和對稱面網(wǎng)格如圖6(c)~圖6(e)所示。三種構(gòu)型的網(wǎng)格總數(shù)均達(dá)到1200萬個。本仿真在時間項(xiàng)上采用基于牛頓法的全隱式格式。在空間離散方面,變量重構(gòu)使用Piecewise linear 方法,對流項(xiàng)使用Roe-FDS的差分格式以及Venkatakrishnan限制器,湍流模型采用SST模型。
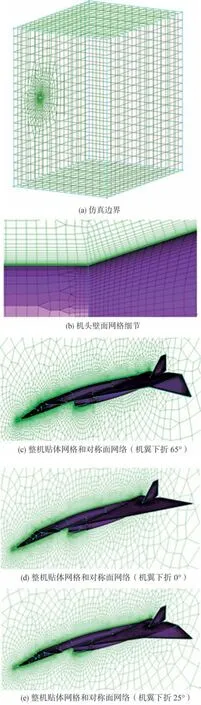
圖6 CFD網(wǎng)格示意圖Fig.6 Mesh for CFD
3 結(jié)果分析
本文典型工況下的整機(jī)壓力分布如圖7~圖9 所示,針對馬赫數(shù)Ma為0.4、1.4和3的情況,顯示了機(jī)翼在不同折疊角狀態(tài)下的流動特點(diǎn)。

圖7 Ma=0.4工況壓力分布Fig.7 Pressure distribution for conditions Ma=0.4

圖8 Ma=1.4工況壓力分布Fig.8 Pressure distribution for conditions Ma=1.4

圖9 Ma=3工況壓力分布Fig.9 Pressure distribution for conditions Ma=3
Ma=0.4時,分析了機(jī)翼折疊角為0°和25°的情況,壓力分布圖顯示,高壓區(qū)集中在進(jìn)氣道附近,這是由于內(nèi)流道被封閉,氣流在此形成堵塞造成了局部高壓。在折疊機(jī)翼區(qū)域附近,壓力分布并無較大差異,因此升力情況較為相近。
Ma=1.4時,分析了機(jī)翼折疊角為0°、25°和65°的情況,壓力分布圖顯示,隨著速度的增大,在進(jìn)氣道附近的高壓區(qū)顯著增強(qiáng)。除此之外,在折疊機(jī)翼區(qū)域附近壓力分布隨著機(jī)翼的向下折疊出現(xiàn)顯著的壓力升高現(xiàn)象,并在折疊鉸鏈位置的前緣出現(xiàn)明顯高壓區(qū)。折疊翼面出現(xiàn)高壓區(qū)可認(rèn)為是機(jī)翼向下折疊捕捉到了激波升力,而在65°折疊位置時鉸鏈位置的前緣高壓區(qū)的增強(qiáng)認(rèn)為是附近前緣激波相互干擾形成的。
Ma=3時,分析了機(jī)翼折疊角為0°和65°的情況,從壓力分布圖可看出,進(jìn)氣道附近的高壓區(qū)進(jìn)一步增強(qiáng)。在折疊機(jī)翼區(qū)域附近壓力分布隨著機(jī)翼向下折疊到65°出現(xiàn)較大區(qū)域的壓力升高,認(rèn)為原因是機(jī)翼向下折疊捕捉到的激波帶來的附加升力可在一定程度上抵消翼面變小帶來的升力損失。
從以上壓力云圖可以看出,由于內(nèi)流道未被考慮,造成本仿真計(jì)算得到的升阻力情況尤其是整機(jī)阻力水平與實(shí)際情況有較大出入。通過參考文獻(xiàn)[13]中關(guān)于可折疊的翼梢部分鉸鏈力矩試驗(yàn)數(shù)據(jù),對典型工況下機(jī)翼折疊部分的鉸鏈力矩進(jìn)行仿真分析結(jié)果的精度評估。典型工況選取了工況1 和工況11,即低速M(fèi)a=0.4、折疊角度為0°和高速M(fèi)a=3、折疊角度為65°的兩種狀態(tài),鉸鏈力矩的仿真和試驗(yàn)數(shù)據(jù)對比見表4。

表4 鉸鏈力矩數(shù)據(jù)對比Table 4 Comparison between hinge moment
仿真分析的誤差在25%以內(nèi),初步分析誤差主要來自飛機(jī)內(nèi)流道的封閉,以及飛機(jī)外形與實(shí)際的差別。考慮到本文對于折疊機(jī)翼的分析主要側(cè)重于定性研究,在折疊機(jī)翼附近的氣動分布與實(shí)際情況具有一定可比對性,并且機(jī)翼折疊角度變化帶來的升阻力變化的趨勢具有較大參考性。圖10 顯示了在不同Ma數(shù)下,不同折疊工況的升阻力特性變化曲線。需要說明的是,由于機(jī)翼折疊后造成參考面積的變化,升阻力系數(shù)的變化情況與升阻力變化并不一致,此處參考面積采用機(jī)翼面積(見表1)。

圖10 整機(jī)升阻力仿真結(jié)果Fig.10 Aerodynamic force and coefficient
在Ma=0.4情況下,機(jī)翼折疊角度從0°變化到25°,升力和阻力變化不大,升阻力系數(shù)略有升高。考慮到低速狀態(tài)下整體升力水平較低,并且起降階段機(jī)翼處于伸展?fàn)顟B(tài),因此在Ma=0.4狀態(tài)下繼續(xù)保持折疊角為0°更有優(yōu)勢。
在Ma=0.8 情況下,機(jī)翼折疊角度從0°變化到25°,升力和阻力略有降低,升阻力系數(shù)變化不大。考慮到此時升力水平較高,飛行器整體性能對升力的小幅變化并不敏感,考慮到橫航向穩(wěn)定性的需求,機(jī)翼折疊角度在25°時更有利于飛行器保持穩(wěn)定,因此選擇在Ma=0.8狀態(tài)下機(jī)翼折疊至25°。
在Ma=1.4情況下,當(dāng)機(jī)翼折疊角度從0°變化到25°,升阻力變化特點(diǎn)與Ma=0.8的情況一致,但是當(dāng)機(jī)翼折疊角度變化至65°時,雖然升力系數(shù)變化不大,但整機(jī)升力損失較大,同時整機(jī)阻力系數(shù)增幅較大。考慮到此時升力水平較高,統(tǒng)籌橫航向穩(wěn)定性需求,機(jī)翼折疊角保持25°是可行的。
在Ma=2.1情況下,當(dāng)機(jī)翼折疊角度從0°變化到65°,升力降低較多,但升力系數(shù)略有提升;阻力略有降低,但是阻力系數(shù)增幅較大。考慮到此時升力水平較高,而高速狀態(tài)下的橫航向穩(wěn)定性需求較大,因此選擇在Ma=2.1狀態(tài)下機(jī)翼折疊至65°。
在Ma=3 情況下,當(dāng)機(jī)翼折疊角度從0°變化到65°,升阻力與升阻力系數(shù)變化特點(diǎn)與Ma=2.1 時一致。雖然此時位于高空,升力水平較低,但飛行器對橫航向穩(wěn)定性的需求更加強(qiáng)烈,因此選擇在Ma=3狀態(tài)下機(jī)翼折疊至65°。
隨著速度的增加,飛行器機(jī)翼在進(jìn)行折疊運(yùn)動的同時,由于升阻力特性發(fā)生了變化,整機(jī)的氣動中心也隨之發(fā)生變化。圖11 顯示了在不同速度以及不同機(jī)翼折疊角度時整機(jī)壓心位置。從圖11中可以看到,壓心在不同折疊角度下的變化范圍是很大的,尤其是在高速狀態(tài)下,壓心變化較為劇烈[14]。若飛機(jī)機(jī)翼不進(jìn)行折疊,在進(jìn)行跨速域飛行時,用于適應(yīng)壓心變化所做的舵面調(diào)整將較為復(fù)雜,從而降低了整機(jī)性能。在對機(jī)翼使用相應(yīng)的變形策略后,如圖11中虛線所示,飛機(jī)壓心的變化范圍被大大縮小了,從而降低了適應(yīng)性調(diào)整的壓力。

圖11 XB-70壓心位置變化Fig.11 XB-70 center of pressure position change
4 結(jié)束語
本文介紹了XB-70 Valkyrie 折疊翼尖的具體結(jié)構(gòu)形式,并通過仿真分析手段研究了折疊翼尖帶來的總體性能優(yōu)勢。通過對超聲速狀態(tài)下的三種不同折疊角度進(jìn)行整機(jī)CFD分析,壓力分布顯示XB-70折疊翼尖下方有較強(qiáng)的高壓區(qū),產(chǎn)生了較為明顯的乘波效應(yīng),使得整機(jī)在展弦比變小的情況下維持了較高的升力水平。與此同時,翼尖向下彎折可增強(qiáng)超聲速時的方向穩(wěn)定性,從而減少垂直尾翼的面積,進(jìn)而降低或消除折疊機(jī)構(gòu)帶來的重量增量。此外,通過將翼尖在不同速度下進(jìn)行折疊的變形策略,可極大地降低高速狀態(tài)下整機(jī)壓力中心的變化量,從而降低飛行器的操控壓力和代價。在Ma=0.4 時機(jī)翼折疊至0°,在Ma=0.8 和Ma=1.4 時,機(jī)翼折疊至25°,在Ma=2.1 和Ma=3 時,機(jī)翼折疊至65°,可獲得較好的收益。
下一步工作可對結(jié)構(gòu)和控制分系統(tǒng)在折疊翼尖策略下的性能變化進(jìn)行總體評估,考慮多學(xué)科耦合狀態(tài)下的整機(jī)性能優(yōu)勢。將XB-70的折疊翼尖變形策略進(jìn)行推廣分析,探索當(dāng)代跨速域變體飛行器的可行方案。
