一種電動汽車充電協議的設計與實現
2022-12-28 08:04:36周侗
汽車電器 2022年11期
周 侗
(沈陽理工大學自動化與電氣工程學院, 遼寧 沈陽 110159)
新能源汽車發展20多年以來,世界主要汽車強國將其提升至國家戰略,中國也將新能源汽車作為戰略性產業之一,更主動、系統地推動新能源汽車產業的發展。在新能源汽車發展戰略中,純電動汽車(EV) 成為了主要突破口。
在電動汽車充電標準方面,國際上有美國SAE標準體系的ISO 15118和歐洲充電標準體系的DIN 70121,其中ISO 15118標準包括ISO 15118-1~ISO 15118-6幾個部分,分別定義了V2G充電網絡的基本信息、網絡拓撲、物理/數據鏈路層功能、物理/數據鏈路層測試及無線充電幾部分功能,支持交、直流充電方式;DIN 70121標準僅支持直流充電方式。中國于2015年12月底發布了新修訂的《電動汽車傳導充電系統》相關的充電系列標準,包括通用要求、交流充電接口、直流充電接口、通信協議等國家標準的內容[1-5]。
有別于前面介紹的國內外電動汽車充電標準,本文設計了一種簡單、易用的電動汽車充電協議,本協議屬于應用層協議的范疇,不局限于特定的傳輸技術,類似于現場總線技術中的MODBUS協議。后面在TI TMS570LS12xx硬件平臺開發出面向EV充電的通信控制器,在實際應用中驗證了充電協議的功能性,達到了預期目的[6-8]。
1 EV充電場景分析
在EV充電應用場景中,EV和供電設備(充電樁,簡稱EVSE) 之間通過EVCC(EV Communication Controller,EV通信控制器) 進行信息交互(圖1),實現EV充電過程中的授權管理、充電控制和充電狀態監測等操作,其中授權管理操作包括了充電付費業務,這也是電動汽車能否充電的先決條件。
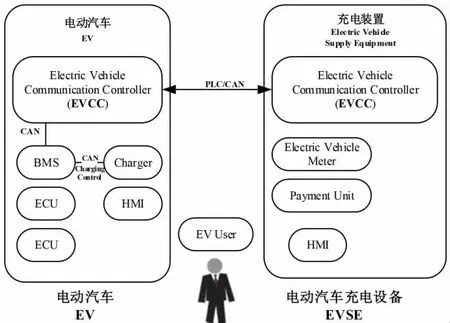
圖1 電動汽車充電業務關系
EV與EVSE之間的通信鏈路可采用CAN、PLC(Power Line Communication) 等,EV中EVCC通過內部CAN總線連接BMS(Battery Management System) 系統,獲取BMS充電的狀態信息,如SOC(剩余電量,State of Charge)。
圖2為電動汽車充電的總體流程。EV充電過程分為4個階段:充電握手階段、充電參數配置階段、充電階段、充電結束階段。當EV和EVSE物理連接完成且上電后,雙方進入“握手”階段,EV會將自己的身份信息,即EVCC-ID,上傳給EVSE,進行充電之前的“權限核準”操作;“充電握手”階段完成后,EV和EVSE進入“充電參數配置”階段,雙方就EVSE最大輸出能力等參數進行協商,以判斷是否能夠充電;充電參數配置階段完成后,則進入“充電”階段。在整個充電階段,EVSE實時輸出自身輸出電流限值,EV則根據整車情況(如環境溫度) 及此電流限值綜合調整充電功能,同時,EV定時向EVSE發送充電狀態供EVSE顯示及上傳服務器;當EV充電完成(即SOC達到100%),或者用戶停止充電(如用戶拔槍或) 后,雙方進入“充電結束”狀態,EVSE停止電流輸出,充電過程結束。
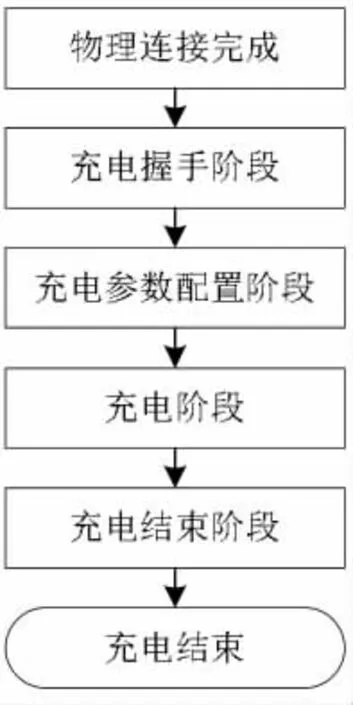
圖2 電動汽車充電流程
上述各個階段中,如果EVCC之間在規定時間內沒有接收到對方報文或者沒有收到正確報文,即判定為超時(超時時間除特殊規定外,一般設為5s);當出現通信超時后,EVSE或者EV進入錯誤處理狀態,一般會立即停止,進入“充電結束階段”,結束充電。
2 充電協議設計
本文在參考相關國際標準[6-7]的基礎上,結合具體應用需求,提出一個結構簡單且可低成本實現的電動汽車充電協議,簡稱EVCP,具體設計如下。
2.1 EVCP協議模型
結合電動汽車充電業務的特點,EVCP協議模型定義如圖3所示。EVCP協議模型采用了OSI參考模型中的物理層、數據鏈路層和應用層這3層,其中物理層和數據鏈路層可以支持多種通信技術,如PLC或CAN通信,在數據鏈路層中增加了一個邏輯鏈路控制子層(Logic Link Control Sublayer,簡稱LLC),主要負責通信鏈路的建立、斷開和維護功能。

圖3 EVCP協議模型
EVCP協議中LLC子層負責通信過程中的可靠性管理。具體流程如下:LLC子層在接收到完整的遠程報文并校驗成功后,需要給遠程LLC子層發送一個“接收確認”報文,即L_Cnf,表示已經收到遠程報文,然后將接收到的遠程報文上傳給APL層處理,如果接收到的遠程報文不正確(例如校驗錯誤),則放棄不回復。
支持EVCP通信協議的EVCC之間通信示例流程如圖4所示,示例中左側EVCC-A為服務發起方。
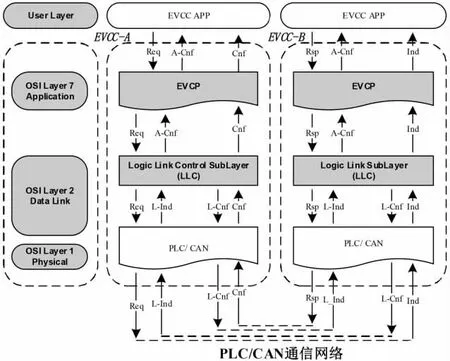
圖4 EV與EVSE之間的通信示例流程
首先,EVCC-A APP 發送服務請求報文(Req),EVCC-B LLC接收到EVCC-A請求報文(Ind) 后,先發送確認報文L-Cnf給EVCC-A LLC,表示已收到Req報文,EVCCA LLC在接收到EVCC-B的L-Cnf報文后,通過A-Cnf服務通知自己上層APP請求報文發送成功,如果EVCC-A LLC在約定時間內未收到來自EVCC-B LLC的確認報文,則通過ACnf服務通知上層APP報文發送失敗。
EVCC-B LLC把接收到的EVCC-A請求報文(Ind) 上傳到EVCC-B APP處理,EVCC-B APP處理完成后,把響應報文(Rsp) 發送給EVCC-A,EVCC-A LLC在接收到Rsp報文(Cnf) 后,給EVCC-B LLC發送一個L-Cnf報文,表示已經接收到Rsp報文,EVCC-B LLC接收到L-Cnf后,通過A-Cnf服務通知上層APP Rsp發送成功,如果EVCC-B LLC在一定時間內未接收到L-Cnf報文,則認為Rsp發送失敗,也通過A-Cnf服務通知上層APP。
EVCC-A在接收到Cnf報文后,處理響應數據,至此完成一個完整的通信流程。需要注意的是,在EVCC之間通信過程中,需要通過L-Cnf報文來確認報文發送成功與否,這也是一種保證通信可靠性的有效機制。
2.2 EVCP幀格式定義
EVCP協議幀格式定義如圖5所示。EVCP幀主要包括幀頭(6字節)、幀尾(2字節) 和協議數據3個部分,其中“服務數據”區域用于容納電動汽車充電業務相關的服務數據。
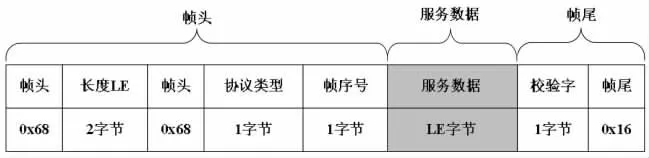
圖5 EVCP幀格式
EVCP幀中“長度LE”字段是“服務數據”區域的長度,如圖5中灰色區域所示。EVCP幀中“校驗字”為“幀頭”和“協議數據”兩部分內容的“簡單累加和”(忽略溢出)。LLC L-Cnf確認幀中“長度LE”值為0,即不包含服務數據內容。EVCP幀序號取值范圍為0~255,循環計數,溢出后再從0開始計數。EVCP協議的最小長度為8(6+2=8)。
EVCP通信協議采用“大端模式”,即多字節數據發送過程中,高位在前。EVCP幀格式中的“協議類型”定義參見表1。

表1 “協議類型” 定義
2.3 EVCP充電服務定義
EVCP協議定義了若干充電業務服務,該服務內容在EVCP幀中“服務數據”中發送。具體服務定義如表2所示。

表2 EVCP充電服務定義
EVCP協議支持SessionSetup、PowerDeliverReq、ChargeStatus和SessionStop這4個充電服務,分別對應充電握手、充電參數配置、充電和充電結束4個充電階段。
表3~表7給出了部分服務的定義,礙于篇幅所限,不做詳細說明。

表3 SessionSetup請求服務
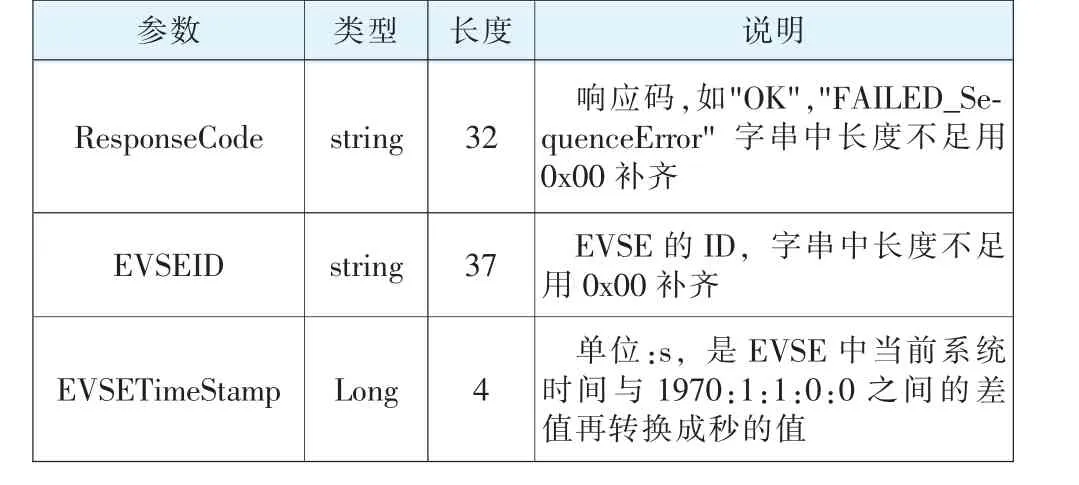
表4 SessionSetup響應服務
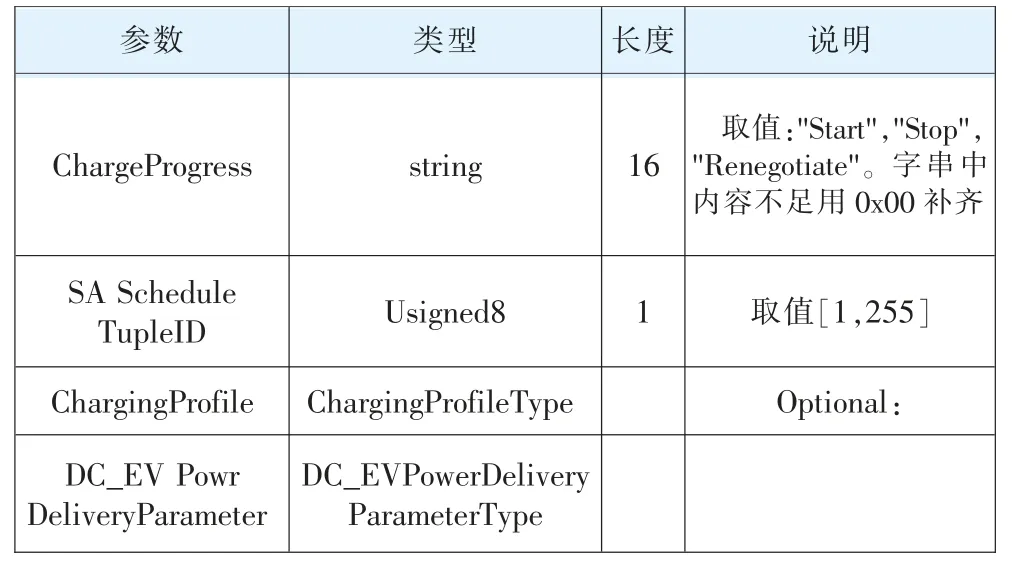
表5 PowerDeliverReq請求服務
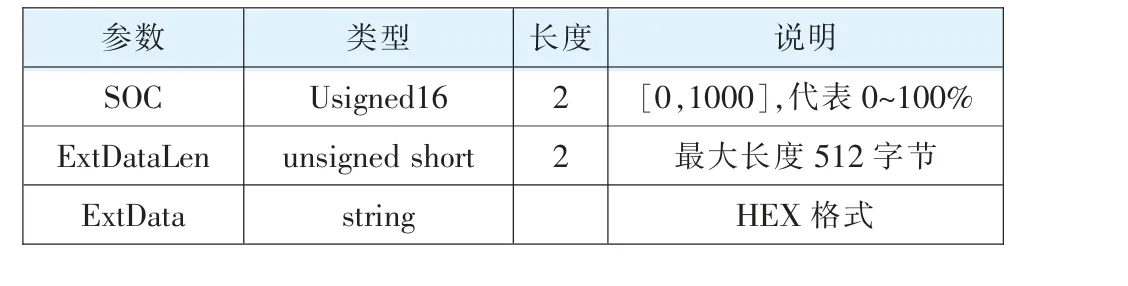
表6 ChargingStatusReq請求服務
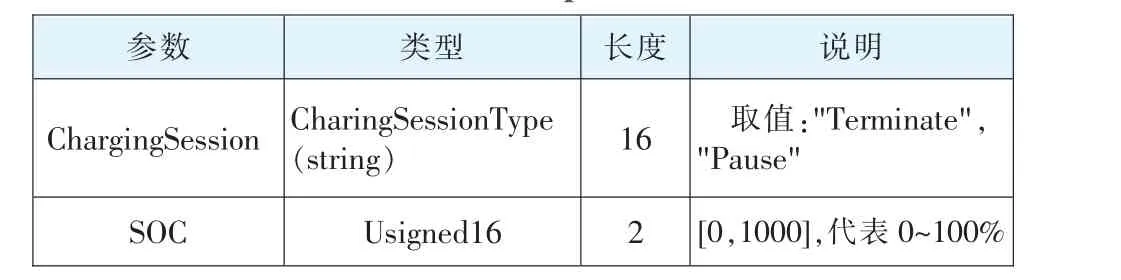
表7 SessionStop請求服務
2.4 EVCP協議實現
在前面研究成果的基礎上,我們開發了支持EVCP協議的EVCC模塊。EVCC開發采用的硬件平臺為TI TMS570LS12xx處理器。其物理層采用PLC通信技術,使用高通公司的QCA7xxx系列通信模塊,PLC通信速率可達到8Mb/s以上。PLC模塊與CPU之間通過串口交換信息。EVCC功能結構如圖6所示。
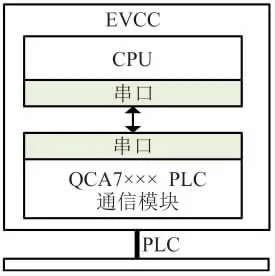
圖6 EVCC功能示意圖
軟件平臺為CCS6,采用C語言編程,使用CCS6自帶的實時操作系統FreeRTOS。
EVCC提供兩路串口,其中一路用于連接高通PLC模塊,另外一路連接以太網接口模塊或者GPRS接口模塊,用于連接云服務器,以便進行用戶權限處理。EVCC還提供兩路CAN 接口,一路CAN 接口用于連接BMS ECU,以獲取BMS的充電狀態信息(如SOC值),另一路CAN接口也可用于設備診斷和固件升級。針對基于CAN總線的固件升級方案,我們也開發了基于UDS(Unified Diagnostic Services) 的升級軟件。最終EVCC產品在國內某款電動汽車上進行了測試,通過了可行性方面的驗證,證明EVCP充電協議在設計方面的完善性和功能性,達到了預期的目的。
3 結論
本文提出了一種適用于電動汽車簡單、易實現的充電協議,適配多種傳輸技術。針對電動汽車的應用場景,充電協議在協議模型、報文結構、服務及參數定義等方面給出了比較詳盡的定義。在EVCC通信過程中加入了報文發送確認機制,保證了通信的可靠性,最后給出了一種基于TI單片機的軟硬件解決方案。
充電協議還未考慮充電設備(如充電樁) 與云服務器之間信息交互及通信安全保障方面的內容,后續會考慮對這些問題進行補充,擴展充電協議的功能,以適應更廣泛的應用場景。
猜你喜歡
海峽姐妹(2020年9期)2021-01-04 01:35:44
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
今日農業(2019年14期)2019-09-18 01:21:54
今日農業(2019年12期)2019-08-15 00:56:32
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年15期)2019-01-03 12:11:33
今日農業(2019年16期)2019-01-03 11:39:20
商周刊(2017年9期)2017-08-22 02:57:56
山東青年(2016年1期)2016-02-28 14:25:25
當代修辭學(2014年3期)2014-01-21 02:30:44
