基于IEHB 系統(tǒng)的車輛穩(wěn)定性控制研究
2022-12-28 08:04:38張祥琨胡君穎
汽車電器 2022年11期
關(guān)鍵詞:系統(tǒng)
張祥琨, 胡君穎, 柯 栒, 池 雪, 程 前
(上汽通用汽車有限公司武漢分公司, 湖北 武漢 430200)
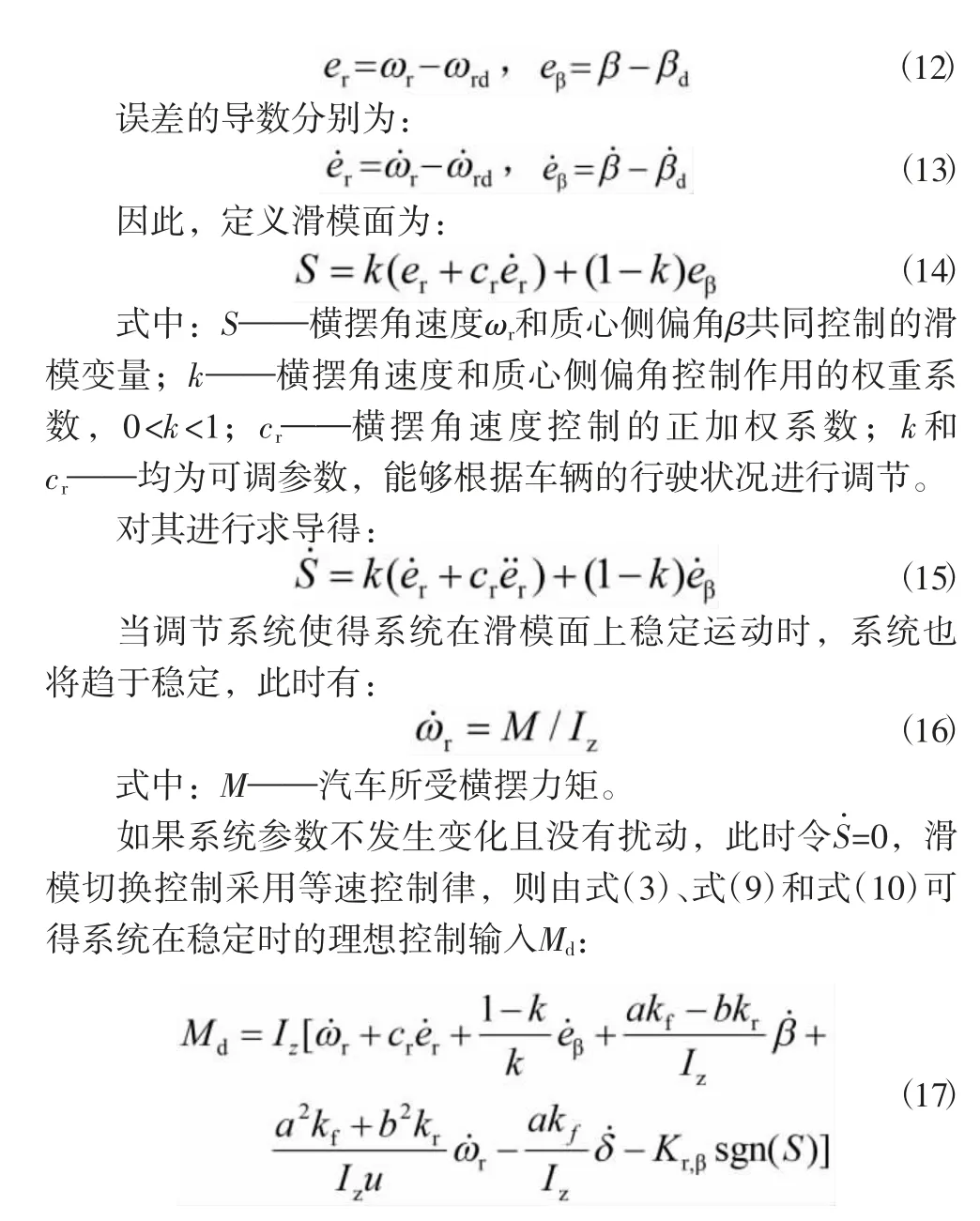
車輛穩(wěn)定性的控制通常是針對車輛的橫擺角速度和質(zhì)心側(cè)偏角,將其進(jìn)行控制并跟蹤期望值,能在多種工況下及時(shí)并且主動地干預(yù)汽車行駛,很大程度上提高了汽車的安全性[1-2]。
隨著汽車趨向智能化,制動性能更優(yōu)越的線控制動系統(tǒng)正逐步取代傳統(tǒng)的制動系統(tǒng)[3]。因此,有必要在集成式電液制動系統(tǒng)(Integrated-Electro-Hydraulic Brake system,,IEHB) 的基礎(chǔ)上對穩(wěn)定性控制系統(tǒng)進(jìn)行研究,以IEHB系統(tǒng)及其控制器作為底層執(zhí)行機(jī)構(gòu),從而實(shí)現(xiàn)車輛穩(wěn)定性控制。
車輛的穩(wěn)定性控制具有非線性、相互耦合且較復(fù)雜的特點(diǎn),傳統(tǒng)的控制方法如PID控制、模糊控制等控制效果都不是很令人滿意。滑模控制雖然在解決系統(tǒng)的非線性問題時(shí)比較有效,但是滑模控制存在的抖振問題也不容忽視[4]。因此,設(shè)計(jì)一種模糊滑模聯(lián)合控制器獲得所需的附加橫擺力矩,通過模糊控制輸出滑模控制的切換增益,有效地消除系統(tǒng)的抖振,提高車輛的轉(zhuǎn)向穩(wěn)定性。
1 IEHB系統(tǒng)組成及其控制器
本文所采用的IEHB系統(tǒng)如圖1所示。該系統(tǒng)是一種集成度高且構(gòu)型簡單可靠的新型線控液壓制動系統(tǒng),能夠較好地完成ESC、ABS等輔助駕駛功能的制動需求[5]。
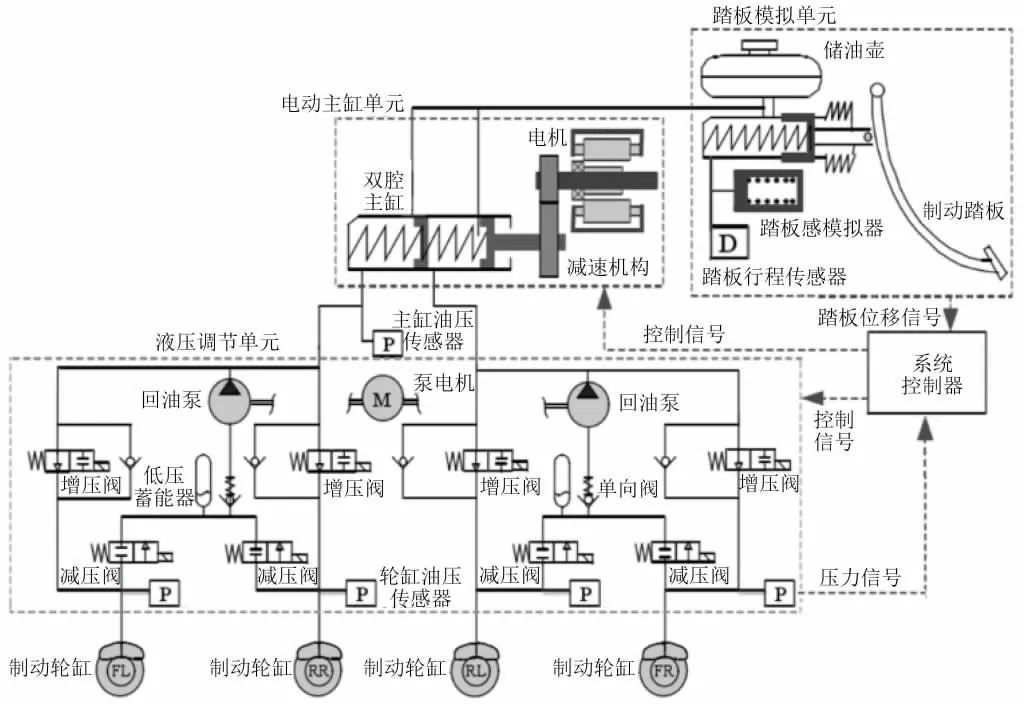
圖1 IEHB系統(tǒng)原理圖
其主要由以下4個(gè)部分組成。
1) 踏板模擬單元:模擬踏板感并通過踏板行程傳感器識別制動意圖。
2) 電動主缸單元:通過電機(jī)帶動減速增矩機(jī)構(gòu)來推動主缸推桿建立主缸壓力。
3) 液壓調(diào)節(jié)單元:通過調(diào)節(jié)增壓閥(常開閥) 與減壓閥(常閉閥) 的開度和電動泵來調(diào)節(jié)各個(gè)輪缸壓力。
4) 系統(tǒng)控制器:根據(jù)駕駛員的制動意圖或上層控制器發(fā)出的主動制動指令對系統(tǒng)實(shí)施控制。
IEHB系統(tǒng)的工作原理如下:IEHB系統(tǒng)在增壓時(shí),永磁同步電機(jī)正轉(zhuǎn)帶動由二級齒輪和滾珠絲杠組成的減速增矩機(jī)構(gòu)實(shí)現(xiàn)直線運(yùn)動,從而推動主缸推桿前進(jìn)以建立主缸壓力,液壓調(diào)節(jié)單元(HCU) 中的增壓閥開啟,減壓閥和電動泵都關(guān)閉,使制動輪缸通過增壓閥進(jìn)行增壓;保壓時(shí),助力電機(jī)停止動作使主缸壓力不變,HCU中的增壓閥、減壓閥和電動泵都關(guān)閉,維持輪缸壓力不變;減壓時(shí),助力永磁同步電機(jī)反轉(zhuǎn)帶動主缸推桿后退,HCU中的增壓閥關(guān)閉,減壓閥開啟,電動泵(柱塞泵和泵電機(jī)) 進(jìn)行工作,使輪缸里的制動液流到低壓蓄能器中,從而實(shí)現(xiàn)輪缸快速減壓。
該IEHB系統(tǒng)的壓力控制策略主要采用以下控制方法。
主缸壓力控制器采用單神經(jīng)元PID控制,得到期望的助力電機(jī)轉(zhuǎn)角位置。①針對永磁同步電機(jī)設(shè)計(jì)位置-轉(zhuǎn)速-電流三閉環(huán)PI控制,建立期望的主缸壓力;②輪缸壓力由多個(gè)控制器聯(lián)合調(diào)控,對于增壓閥采用查表法PID控制;③對于減壓閥采用模糊控制;④對于電動泵采用邏輯門限值控制,從而實(shí)現(xiàn)由主缸到輪缸的IEHB系統(tǒng)整體壓力精確控制。
IEHB系統(tǒng)控制框架如圖2所示,其中,pw_d為制動輪缸期望壓力,pm_d為主缸期望壓力,pw為制動輪缸實(shí)際壓力,pm為主缸實(shí)際壓力。
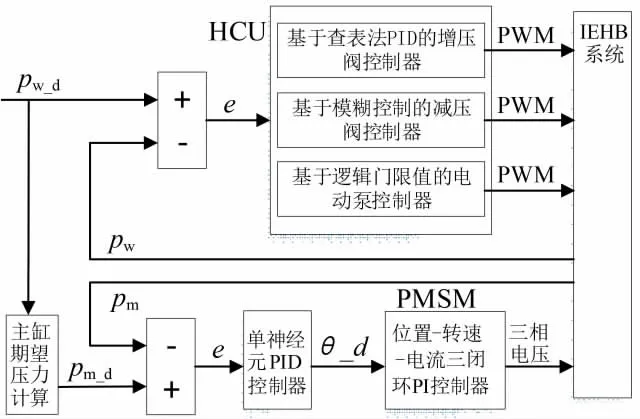
圖2 IEHB系統(tǒng)控制框架
2 汽車動力學(xué)建模
在Simulink軟件中搭建控制器的模型,與CarSim整車模型協(xié)同仿真,車輛模型準(zhǔn)確,仿真結(jié)果真實(shí)有效[6],在CarSim中選取某B型乘用車作為整車動力學(xué)模型。
線性二自由度車輛模型輸入和輸出響應(yīng)特性良好,故選擇二自由度車輛模型作為參考模型,將中性轉(zhuǎn)向條件下得到的質(zhì)心側(cè)偏角和橫擺角速度作為標(biāo)準(zhǔn),并考慮汽車輪胎與路面摩擦力的約束條件,得到汽車運(yùn)動二自由度的線性微分方程[7]。

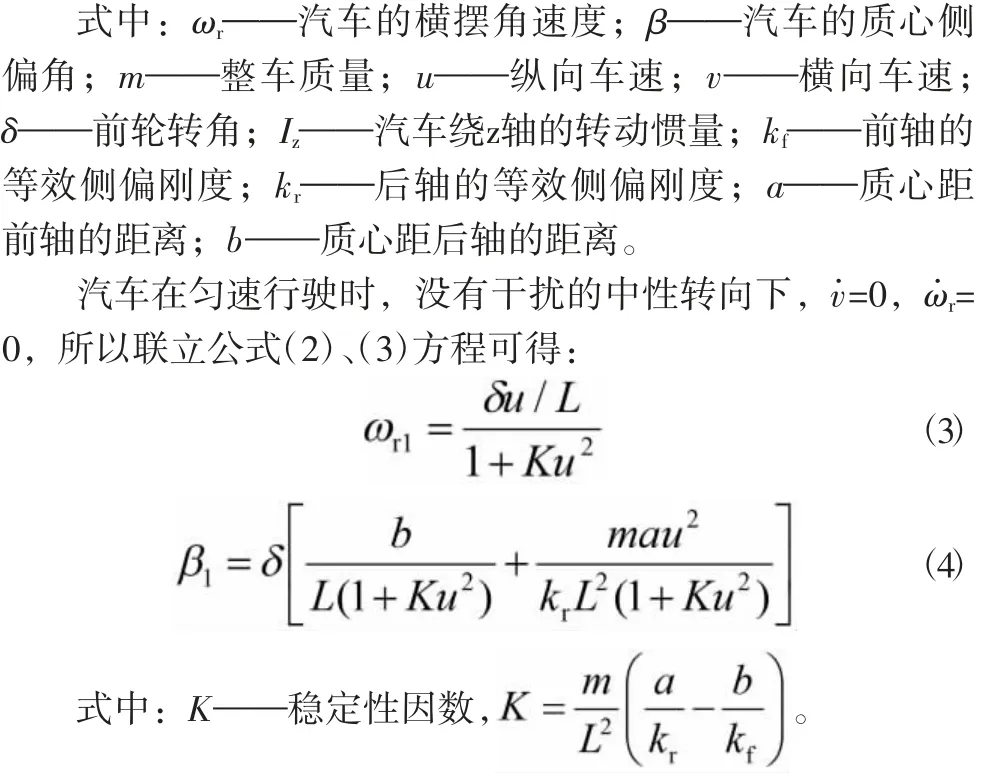
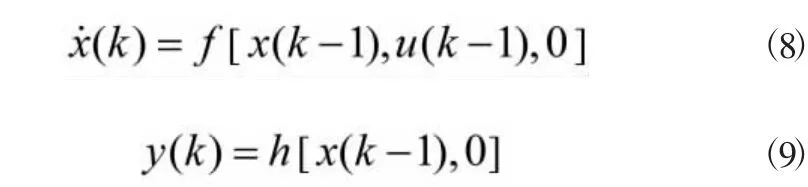
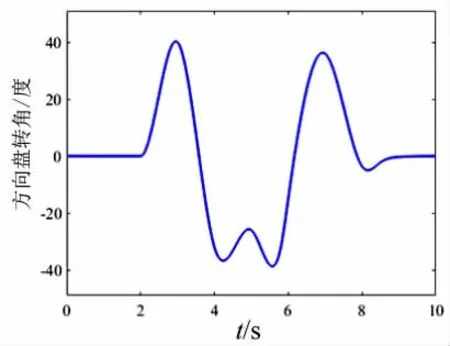
由于側(cè)向加速度ay不能超過轉(zhuǎn)向時(shí)輪胎與地面的最大附著系數(shù),即ay=ωrd·u 針對汽車轉(zhuǎn)向,設(shè)計(jì)了一個(gè)基于IEHB的車輛穩(wěn)定性控制系統(tǒng),以橫擺角速度和質(zhì)心側(cè)偏角的實(shí)際值與期望值作為控制輸入,設(shè)計(jì)模糊滑模聯(lián)合控制器輸出主動的附加橫擺力矩,并通過單輪差動制動的方式來實(shí)現(xiàn)附加橫擺力矩,從而使得車輛具有良好的行駛軌跡和轉(zhuǎn)向穩(wěn)定性,ESC系統(tǒng)控制框架如圖3所示。 圖3 ESC系統(tǒng)控制框架 采用擴(kuò)展卡爾曼濾波(EKF) 對質(zhì)心側(cè)偏角進(jìn)行在線參數(shù)估計(jì),在車輛線性二自由模型的基礎(chǔ)上增加一個(gè)縱向運(yùn)動自由度,從而建立一個(gè)車輛三自由度模型。二自由度車輛模型的橫向、橫擺運(yùn)行動力學(xué)公式如式(1)和式(2)所示,對于三自由度模型,新增的縱向運(yùn)動學(xué)公式如下[8]: 因此,針對上述車輛動力學(xué)模型可得本文的估計(jì)算法過程如下[9]。 可通過不計(jì)噪聲的影響來獲取k時(shí)刻的觀測向量和狀態(tài)向量的估算值,簡化建立系統(tǒng)的狀態(tài)方程和觀測方程: 式中:x(k)——狀態(tài)變量;u(k)——控制變量;y(k)——測量輸出;w(k)——系統(tǒng)噪聲;v(k)——測量噪聲。其中,w(k)與v(k)相互獨(dú)立。 將上式改寫為擴(kuò)展卡爾曼濾波方程。 1) 狀態(tài)方程: 滑模變結(jié)構(gòu)可以使系統(tǒng)的結(jié)構(gòu)隨時(shí)間改變,使得被控系統(tǒng)在滑模面附近穩(wěn)定,并通過切換函數(shù)的作用使被控系統(tǒng)收斂到滑模面上[10]。以橫擺角速度和質(zhì)心側(cè)偏角作為控制變量,橫擺角速度和質(zhì)心側(cè)偏角的實(shí)際值與期望值之間的誤差分別為: 式中:Kr,β——橫擺角速度和質(zhì)心側(cè)偏角共同控制的滑模切換增益,且Kr,β>0。 在滑模控制器中,系統(tǒng)的抖振振幅通常與切換增益Kr,β成正比[11]。如果切換增益Kr,β可以自適應(yīng)地調(diào)整,在遠(yuǎn)離滑動面時(shí)取較大值,接近滑動面時(shí)取較小值,在到達(dá)滑模面上取零,即只采用等效控制,就可以有效地減少抖振。 因此,采用模糊規(guī)則根據(jù)滑模變量S的值來估計(jì)Kr,β,當(dāng)S的絕對值較大時(shí),Kr,β較大,當(dāng)S的絕對值較小時(shí),Kr,β較小,當(dāng)S趨于0時(shí),Kr,β為0,即僅用等效控制來減少甚至消除抖振。 系統(tǒng)輸入輸出的模糊集分別定義如下: 得出附加橫擺力矩后通過制動車輪選擇和制動壓力計(jì)算模塊得到對被控車輪所需施加的輪缸壓力。 單個(gè)車輪制動的優(yōu)點(diǎn)是對汽車的沖擊較小,對運(yùn)動性能通常沒有影響[12]。由于不同車輪在相同制動力下對車輛橫擺特性的影響不同,故選擇高效車輪進(jìn)行單輪差動制動。相關(guān)的選擇策略見表1。 表1 整車參數(shù) 式中:f——摩擦系數(shù);A——接觸面積;rw——制動車輪等效半徑;pw——輪缸壓力(其中假設(shè)汽車各個(gè)車輪的f、A均相同)。 在CarSim與Simulink聯(lián)合仿真環(huán)境中搭建的系統(tǒng)模型如圖4所示。在低附著系數(shù)的路面下,對雙移線工況進(jìn)行了仿真實(shí)驗(yàn),分別分析了在有無控制器作用下的車輛橫擺角速度和質(zhì)心側(cè)偏角的響應(yīng)特性,并觀測了輪缸制動壓力的跟隨情況。 圖4 ESC系統(tǒng)聯(lián)合仿真模型 仿真條件:初始車速20m/s,濕滑的水泥路面(路面附著系數(shù)設(shè)置為0.4),方向盤轉(zhuǎn)角如圖5所示,轉(zhuǎn)向比取20,仿真時(shí)間10s。仿真結(jié)果如圖6所示。 圖5 雙移線工況方向盤轉(zhuǎn)角 圖6a和圖6b分別為在雙移線工況下有無控制器作用的車輛質(zhì)心側(cè)偏角和橫擺角速度的響應(yīng)結(jié)果。從圖6a和6b中有無控制器作用的對比可以看出:以較高的車速來回打方向盤使汽車路線為雙移線時(shí),沒有控制的橫擺角速度和質(zhì)心側(cè)偏角都出現(xiàn)了較大的超調(diào)量,這很可能會導(dǎo)致側(cè)滑失穩(wěn)和偏離期望軌跡。而處于控制時(shí),汽車橫擺角速度和質(zhì)心側(cè)偏角可以較好地跟隨期望值而不出現(xiàn)超調(diào),說明被控車輛具有較高的穩(wěn)定性,可以較好地接近駕駛員的期望。但是,質(zhì)心側(cè)偏角的實(shí)際值與參考值仍有一定的差異和滯后性,這也反映了使用單輪差動制動的局限性,只能在提高穩(wěn)定性方面起到一定的改善作用。 圖6c中體現(xiàn)的是控制過程中4個(gè)輪缸壓力的變化,圖6d中則是其中左前輪的實(shí)際壓力對期望壓力的跟隨情況,由仿真結(jié)果可以看出,IEHB系統(tǒng)可以較好地實(shí)現(xiàn)車輛穩(wěn)定性控制系統(tǒng)發(fā)出的制動需求,并且4個(gè)輪缸壓力的變化與車輛行駛狀態(tài)變化相符,說明了基于IEHB系統(tǒng)的ESC控制器的有效性與合理性。 圖6 正弦輸入下的質(zhì)心側(cè)偏角對比圖 另外,從圖中綜合來看,仿真結(jié)果也沒有出現(xiàn)抖振問題,說明模糊滑模聯(lián)合控制對消除抖振具有良好的作用。 為提高車輛在轉(zhuǎn)向工況下的穩(wěn)定性,設(shè)計(jì)一種模糊滑模聯(lián)合控制器。通過擴(kuò)展卡爾曼濾波進(jìn)行質(zhì)心側(cè)偏角的估計(jì),以質(zhì)心側(cè)偏角和橫擺角速度為控制變量,采用模糊滑模控制得到附加橫擺力矩,以單輪差動制動方式施加到被控車輪。以所設(shè)計(jì)的IEHB系統(tǒng)及其控制器作為底層執(zhí)行機(jī)構(gòu),利用聯(lián)合仿真平臺對所提出的壓力控制與車輛穩(wěn)定性控制策略在雙移線工況下進(jìn)行了仿真實(shí)驗(yàn)。結(jié)果表明:所設(shè)計(jì)的IEHB系統(tǒng)壓力控制器能夠較好地實(shí)現(xiàn)壓力跟蹤,并驗(yàn)證了所提出的基于IEHB系統(tǒng)的車輛穩(wěn)定性控制策略的有效性與合理性。
3 車輛穩(wěn)定性控制系統(tǒng)設(shè)計(jì)

3.1 質(zhì)心側(cè)偏角估計(jì)


3.2 滑模控制器設(shè)計(jì)
3.3 模糊滑模控制器設(shè)計(jì)

3.4 附加橫擺力矩的實(shí)現(xiàn)策略


4 聯(lián)合仿真分析


5 結(jié)論
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
