基于CBAM-YOLOv5的煤礦輸送帶異物檢測
2023-01-06 12:34:02孫思雅王均利
煤炭學(xué)報 2022年11期
郝 帥,張 旭,馬 旭,孫思雅,文 虎,王均利
(1.西安科技大學(xué) 電氣與控制工程學(xué)院,陜西 西安 710054;2.西安科技大學(xué) 安全科學(xué)與工程學(xué)院,陜西 西安 710054;3.陜西彬長礦業(yè)集團有限公司,陜西 咸陽 712046)
輸送帶作為煤礦井下煤炭運輸?shù)闹饕O(shè)備,其所處工作環(huán)境較為復(fù)雜。在長期、高負荷使用過程中,輸送物料中易夾雜大塊煤炭、矸石、錨桿、槽鋼等異物,如未能被碎煤設(shè)備、除鐵設(shè)備及時清理,在下落時可能造成輸送帶局部損傷,甚至?xí)檀┹斔蛶А4送猓@些異物也易卡在槽體、托輥與帶體間,致使輸送帶被磨透,從而導(dǎo)致帶體出現(xiàn)撕裂現(xiàn)象,進而影響煤礦正常生產(chǎn),降低產(chǎn)值[1]。因此,本文擬研究一種基于計算機視覺技術(shù)的異物檢測方法,以期在對輸送帶監(jiān)控過程中能夠自動、準確檢測異物目標,便于后續(xù)處理,提高帶式輸送機運行的穩(wěn)定性和生產(chǎn)效率,預(yù)防皮帶撕裂。該研究對于保證煤礦的安全生產(chǎn)以及礦工的生命安全具有重要意義。
目前,國內(nèi)外眾多學(xué)者利用計算機視覺技術(shù)對輸送帶上的異物檢測已開展了大量研究,并取得了一定的研究成果。申斌學(xué)等[2]通過深度學(xué)習(xí)圖像識別技術(shù)對X射線傳感器獲取的物塊射線特征信息進行分析,從而可以準確識別出煤和矸石;劉富強等[3]利用矸石和煤炭之間的灰度以及紋理差異對其進行識別;程健等[4]考慮視頻背景對待檢測目標的干擾,研究中先利用一種改進的高斯混合模型去除視頻背景的影響,然后進行煤矸石的檢測。然而上述方法主要依賴于人工特征提取,存在易受外部環(huán)境干擾、泛化能力不強等缺點,其檢測精度往往難以保證[5]。此外,由于井下環(huán)境復(fù)雜,存在光照不均、煤塵干擾嚴重以及輸送帶高速運動易造成圖像模糊等問題,從而使得基于人工提取特征的目標檢測方法效果往往欠佳[6]。
鑒于人工特征提取存在的缺陷,眾多學(xué)者利用深度學(xué)習(xí)方法進行目標檢測[7]。目前,基于深度學(xué)習(xí)的目標檢測算法主要分為2類:第1類是two-stage目標檢測模型,代表算法有Fast R-CNN[8],Faster R-CNN[9]等。該類算法主要是根據(jù)圖像中目標物體的具體位置,采用預(yù)先提取候選區(qū)域的方法進行訓(xùn)練。吳守鵬等[10]提出一種基于Faster-RCNN的雙向特征金字塔網(wǎng)絡(luò)(Bidirectional Feature Pyramid Networks,BFPN)輸送帶異物識別方法,并通過實驗證明了該方法對矸石、錨桿等非煤異物具有較高的識別率;李偉山等[11]提出一種改進的Faster-RCNN煤礦井下行人檢測方法,并通過實驗證明了所提出的方法相比于傳統(tǒng)方法具有更高的準確率以及更強的泛化能力。另一類是one-stage目標檢測模型,代表算法有SSD[12]和YOLO[13]系列等。該類算法直接對網(wǎng)絡(luò)進行端到端的訓(xùn)練,具有網(wǎng)絡(luò)結(jié)構(gòu)簡單、實時性好等優(yōu)點。WANG等[14]在SSD檢測算法基礎(chǔ)上,通過改進損失函數(shù)以及優(yōu)化錨框比例,實現(xiàn)了礦井輸送帶的異物檢測;劉浩等[15]基于YOLOv3網(wǎng)絡(luò)設(shè)計了一種井下人員不安全行為識別系統(tǒng)。YOLOv5[16]作為YOLO系列的典型代表,在輸入端采用了自適應(yīng)錨框計算以適應(yīng)不同數(shù)據(jù)集;在backbone中采用了Focus模塊對圖像進行切片采樣,從而可以得到更加完備的下采樣目標特征信息;在Neck部分采用了新的CSP結(jié)構(gòu)以加強網(wǎng)絡(luò)中特征融合能力,其檢測精度和實時性相較于YOLOv3和YOLOv4均有較大提升[17-18]。
為此,針對煤礦井下輸送帶中異物目標圖像受輸送帶高速運動、煤塵干擾以及光照不均等影響造成傳統(tǒng)檢測算法難以準確檢測問題,提出一種基于卷積塊注意模型的YOLOv5井下輸送帶異物檢測方法。本文主要創(chuàng)新點為:① 為了解決輸送帶中異物目標圖像易受煤塵干擾問題,對待檢測圖像首先進行自適應(yīng)直方圖均衡化,提高圖像對比度,增強圖像質(zhì)量。② 針對輸送帶中異物目標受光照不均影響使其難以被準確檢測的問題,在YOLOv5檢測網(wǎng)絡(luò)基礎(chǔ)上引入卷積塊注意模型(Convolutional Block Attention Module,CBAM)[19]以增強目標在復(fù)雜背景中的顯著度,從而提高異物目標的特征表達能力,進而提高檢測網(wǎng)絡(luò)的檢測精度。③ 針對輸送帶高速運動易導(dǎo)致圖像模糊進而導(dǎo)致異物目標難以被準確檢測問題,通過引入深度可分離卷積模塊精簡原檢測網(wǎng)絡(luò)模型參數(shù)以提高網(wǎng)絡(luò)的檢測速度,并通過優(yōu)化損失函數(shù)來降低網(wǎng)絡(luò)的損失值以加快網(wǎng)絡(luò)收斂速度,進而提高整個檢測網(wǎng)絡(luò)的檢測精度。
1 YOLOv5算法原理
YOLOv5模型主要由Input,Backbone,Neck,Prediction 四部分組成。Input主要由mosaic數(shù)據(jù)增強、自適應(yīng)錨框計算和自適應(yīng)圖片縮放3部分組成。Backbone包含焦點層(Focus)、跨階段局部網(wǎng)絡(luò)層(Cross Stage Partial Network,CSP)和空間金字塔池化(Spatial Pyramid Pooling,SPP)3部分。其中Focus結(jié)構(gòu)對圖片進行切片操作,可得到2倍信息的下采樣特征圖[20];CSP 結(jié)構(gòu)主要是為了從網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計的角度解決推理中計算量過大的問題;SPP層通過對特征層3次卷積后進行最大池化,增大感受野,增強網(wǎng)絡(luò)的非線性表達能力。YOLOv5中Neck部分是對FPN結(jié)構(gòu)的改進,以加強網(wǎng)絡(luò)的特征融合和網(wǎng)絡(luò)中推理信息的傳輸[21]。原網(wǎng)絡(luò)中的Prediction使用的是GIOU_Loss(Generalized Intersection over Union Loss)[22]函數(shù),該函數(shù)用來估算檢測目標矩形框的識別損失,YOLOv5整體網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示。
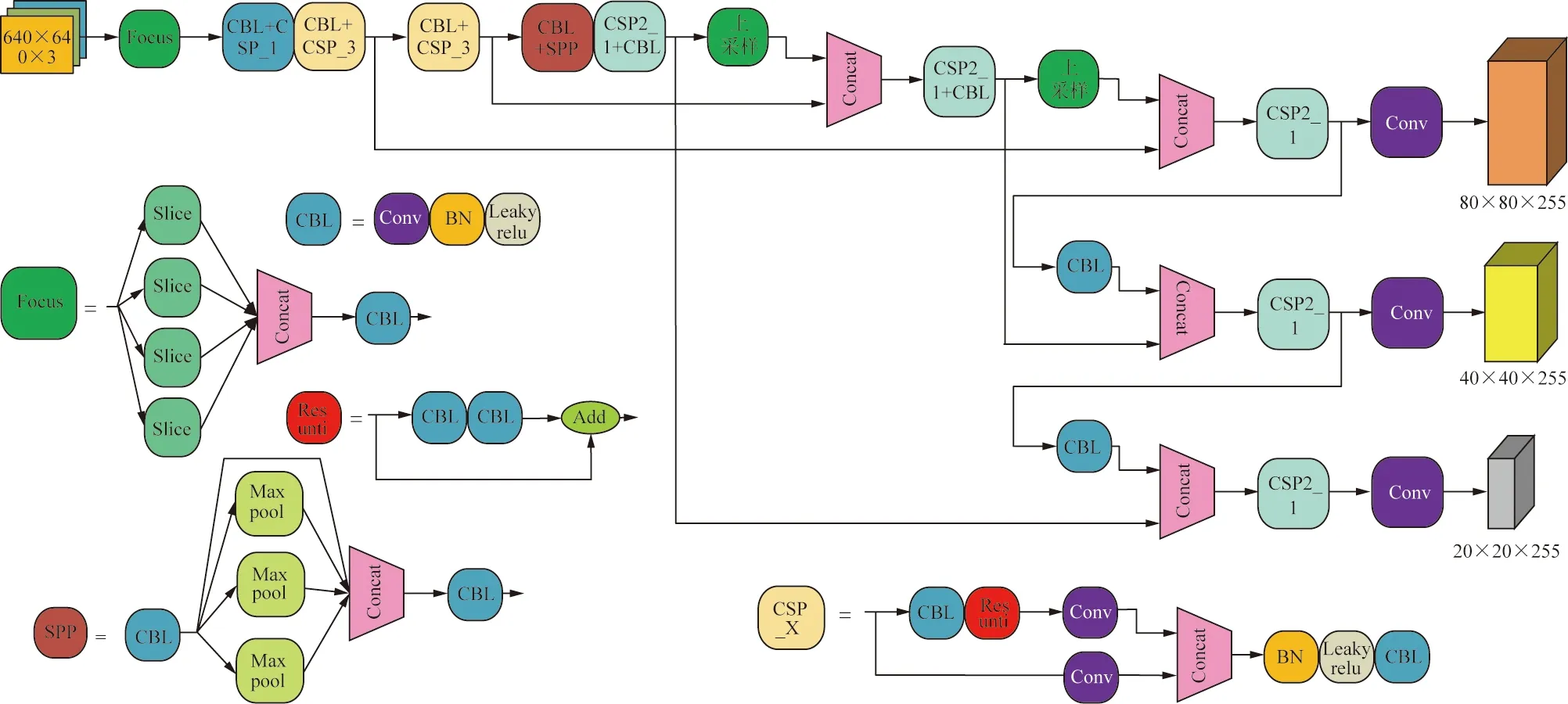
圖1 YOLOv5網(wǎng)絡(luò)結(jié)構(gòu)Fig.1 YOLOv5 network structure
2 基于改進的YOLOv5輸送帶異物檢測方法
本文所提出算法的檢測框架如圖2所示。首先,將礦井輸送帶監(jiān)控視頻采集到的圖片大小調(diào)整為640×640,并進行自適應(yīng)直方均衡處理;然后,將其送入到所設(shè)計的檢測網(wǎng)絡(luò)中進行訓(xùn)練,從而獲取檢測模型訓(xùn)練權(quán)重;最后,利用測試數(shù)據(jù)對所提出的檢測網(wǎng)絡(luò)進行測試驗證。
2.1 融合卷積塊注意模型的檢測網(wǎng)絡(luò)
為了解決煤礦井下復(fù)雜背景導(dǎo)致的大塊異物目標顯著度低的問題,在YOLOv5網(wǎng)絡(luò)模型的CSP模塊后引入通道和空間卷積塊注意模型,其結(jié)構(gòu)如圖3所示,其中,F(xiàn)為輸入特征圖;FX為通過空間注意力后得到的特征圖。
圖3中,MC為卷積塊注意模型中的通道注意力;MS為空間注意力。給定特征圖F∈RC×H×W,其中,C為特征圖的通道數(shù);H×W為特征圖大小;R為由C,H,W組成的三維矩陣。

圖2 所提出算法的檢測框架Fig.2 Detection framework of the proposed algorithm

圖3 CBAM模塊Fig.3 CBAM module
CBAM模塊首先將F送入通道注意力模塊,通過平均池化和最大池化得到每個通道的信息,并將得到的參數(shù)通過多層感知器進行疊加,再經(jīng)過Sigmoid函數(shù)激活,從而得到通道注意力特征MC(F),其計算公式[23]為
(1)

將給定特征圖FX送入空間注意力模塊后,通過平均池化和最大池化沿通道維度匯聚空間信息,生成空間特征圖Favg∈R1×H×W和Fmax∈R1×H×W,再通過1×1的卷積和Sigmoid函數(shù)激活,得到空間注意力特征;接著與FX逐元素乘,最終得到空間注意力特征圖FS,其計算公式[24]為
(2)

YOLOv5在提取特征過程中無注意力偏好,對不同重要程度的特征采用相同的加權(quán)方式。本文通過在3個CSP模塊后分別引入CBAM模塊來解決原網(wǎng)絡(luò)無注意力偏好問題,使網(wǎng)絡(luò)在檢測過程中能夠更多的關(guān)注興趣目標。
2.2 深度可分離卷積
為了使網(wǎng)絡(luò)具有較高檢測精度的同時減少引入注意力機制后對網(wǎng)絡(luò)檢測速度的影響,引入深度可分離卷積(Depthwise Separable Convolution,DWConv)[25]代替主干網(wǎng)絡(luò)中的原有卷積操作,其結(jié)構(gòu)如圖4所示。

圖4 深度可分離卷積結(jié)構(gòu)Fig.4 Deep separable convolution structure
圖4中,M為數(shù)據(jù)輸入通道數(shù);N為數(shù)據(jù)輸出通道數(shù);Dx為數(shù)據(jù)輸入長度;Dy為數(shù)據(jù)數(shù)據(jù)輸入寬度;Dk為卷積核大小;Dw為數(shù)據(jù)輸出長度,Dh為數(shù)據(jù)輸出寬度。網(wǎng)絡(luò)中原有卷積主要是對通道特征圖進行卷積操作[26],其計算量Q1為
(3)
圖4中,深度可分離卷積將卷積操作分解為1個3×3的深度卷積和1個1×1的逐點卷積[27]。假設(shè)輸入的特征圖F為DxDyM,經(jīng)過深度卷積操作后得到DhDwN的特征圖G,其計算量Q2為
(4)
由式(3)和式(4)可以推出,深度可分離卷積與標準卷積之間的計算量比值為
(5)
通過引入深度可分離卷積可以將原網(wǎng)絡(luò)的計算量降低和參數(shù)減少,從而能夠顯著提高檢測速度。本文采用3×3的卷積核,輸入通道為3,輸出通道為256,網(wǎng)絡(luò)總計算量可降低為使用標準卷積計算量的1/8。
2.3 優(yōu)化損失函數(shù)
損失函數(shù)可以很好的反應(yīng)模型和實際數(shù)據(jù)間的差異,YOLOv5原網(wǎng)絡(luò)中邊框回歸損失采用GIOU函數(shù)計算,其計算公式為
(6)
式中,C為2個框的最小外接矩形;B∪Bgt為2個框的并集。
當(dāng)預(yù)測框和目標框相互包含或?qū)挕⒏叱霈F(xiàn)對齊時,損失函數(shù)會退化為IOU(Intersection over Union)。此時,將無法評估預(yù)測框和目標框的相對位置,造成目標定位不準確,預(yù)測框失去收斂方向,影響最終檢測精度。DIOU(Distance Intersection over Union)[28]綜合考慮了預(yù)測框與目標框之間的距離、重疊率以及尺度影響,從而能夠保證訓(xùn)練過程中具有較好收斂速度的同時不易發(fā)散。為此,筆者使用DIOU代替原損失函數(shù)從而實現(xiàn)目標框與預(yù)測框之間更有效的損失計算,其計算公式為
(7)
式中,b和bgt分別為檢測框和目標框的中心點;ρ為2個中心點間的歐式距離;S為覆蓋檢測框和目標框之間最小矩形的斜距。
2.4 自適應(yīng)直方圖均衡
針對異物目標圖像受煤塵干擾大的問題,使用自適應(yīng)直方圖均衡對數(shù)據(jù)集進行增強,提高圖像對比度,增強圖像質(zhì)量。
自適應(yīng)直方圖均衡主要是將輸入圖像分割為小塊后,對每個像素通過其周邊一個矩形范圍內(nèi)像素的直方圖進行均衡化,從而均衡圖像灰度并增強圖像的邊緣[29]。輸入圖像像素數(shù)記為x,并在[0,L-1]取值,L為動態(tài)范圍內(nèi)的離散灰度級。輸入圖像的直方圖p(rk)可以表示為
(8)
式中,rk為第k個灰度級;nk為圖像中出現(xiàn)的像素個數(shù)。
灰度累計分布函數(shù)Sk可表示為
(9)
直方圖均衡化變換函數(shù)為
r′k=round((L-1),SK),K=0,1,2,…,L-1
(10)
其中,r′k為直方圖均衡化后的灰度級;round(·)為四舍五入取整運算。自適應(yīng)直方圖均衡化處理后的局部效果對比如圖5所示。
從圖5可以看出,經(jīng)過自適應(yīng)直方均衡處理后的圖像可以減少煤塵干擾,清晰度明顯優(yōu)于原圖,為后續(xù)目標的準確檢測提供了良好基礎(chǔ)。
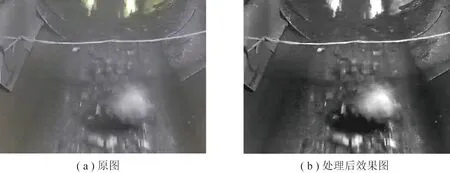
圖5 自適應(yīng)直方均衡圖 Fig.5 Adaptive histogram equalization diagram
3 模型訓(xùn)練及結(jié)果分析
實驗中使用的軟硬件平臺配置見表1。
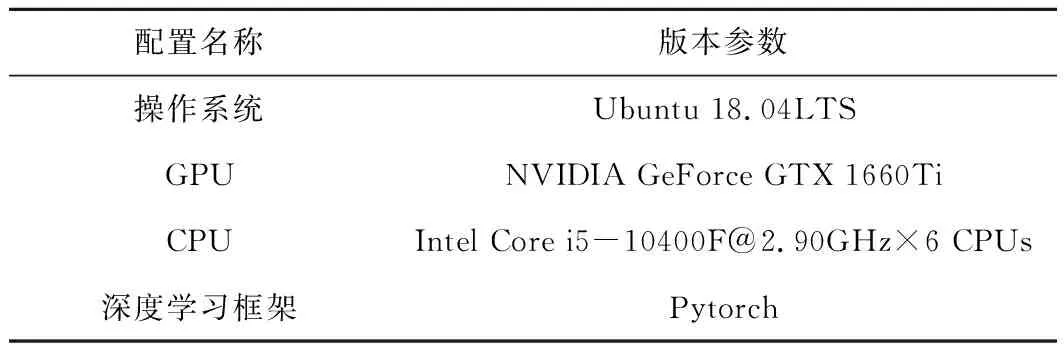
表1 軟硬件平臺配置
3.1 數(shù)據(jù)采集
本文所用數(shù)據(jù)來自于某煤礦井下輸送帶工作時的監(jiān)控視頻,輸送帶運動速度大致為4.5 m/s,共截取樣本2 300張。實驗中,隨機選取1 600張作為訓(xùn)練樣本,其余700張作為測試樣本。
3.2 網(wǎng)絡(luò)模型訓(xùn)練
模型訓(xùn)練過程中,動量因子設(shè)0.937,以避免模型陷入局部最優(yōu)解或跳過最優(yōu)解。將網(wǎng)絡(luò)訓(xùn)練的前300輪學(xué)習(xí)率設(shè)置為0.01,后200輪訓(xùn)練的學(xué)習(xí)率降為0.001。將權(quán)重衰減正則項設(shè)置為0.000 5以防止網(wǎng)絡(luò)在訓(xùn)練過程中出現(xiàn)過擬合。最后經(jīng)過500輪的模型迭代訓(xùn)練,得到最優(yōu)模型權(quán)重。
3.3 實驗結(jié)果及分析
為了驗證本文算法優(yōu)勢,將本文提出算法與YOLOv5進行對比,其結(jié)果如圖6所示。
從圖6可以看出,YOLOv5算法迭代到50次左右準確率才逐漸上升到0.8左右,并最終穩(wěn)定在0.87左右;而本文算法迭代了50輪后準確率大致在0.9左右,并最終穩(wěn)定在0.93左右。損失曲線和mAP曲線對比結(jié)果如圖7所示。

圖6 準確率變化曲線Fig.6 Accuracy rate change curves
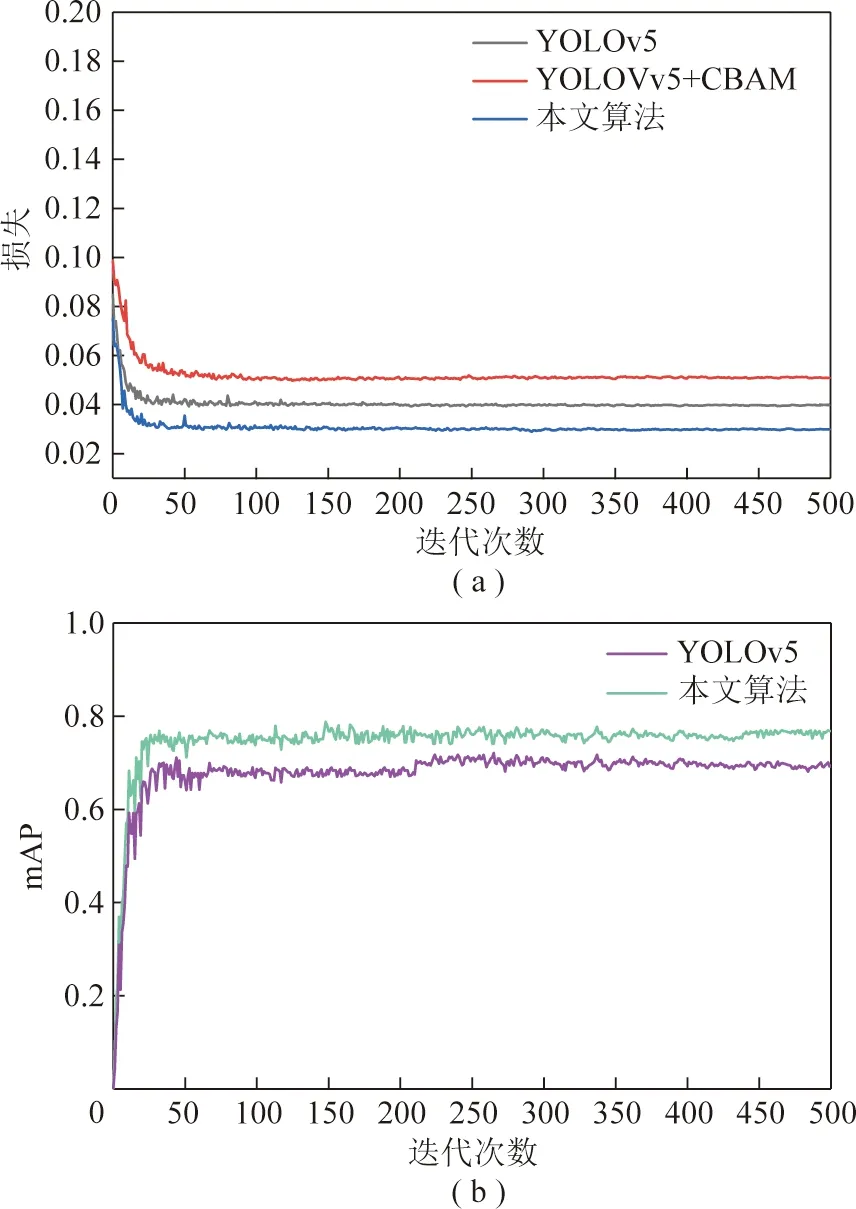
圖7 評價指標Fig.7 Evaluating indicator
由圖7(a)可知,YOLOv5損失在迭代到50次才逐漸降低到0.04,最終穩(wěn)定在0.039左右;引入CBAM模塊后,網(wǎng)絡(luò)的初始損失為0.098左右,最終穩(wěn)定在0.05左右;優(yōu)化損失函數(shù)后,網(wǎng)絡(luò)損失值降低且收斂速度加快,初始損失值在0.075左右,最終穩(wěn)定在0.029,可以看出本文所提出的檢測模型達到了較好的訓(xùn)練效果。由圖7(b)的mAP變化曲線可以看出,本文算法的mAP(Mean Arerage Precision,平均精度)數(shù)值明顯高于YOLOv5網(wǎng)絡(luò)。由于本文算法在原始YOLOv5檢測框架下分別進行了自適應(yīng)直方均衡、引入CBAM和深度可分離卷積,并且對損失函數(shù)進行了優(yōu)化。為了驗證各部分作用,進行消融實驗驗證,其結(jié)果見表2。
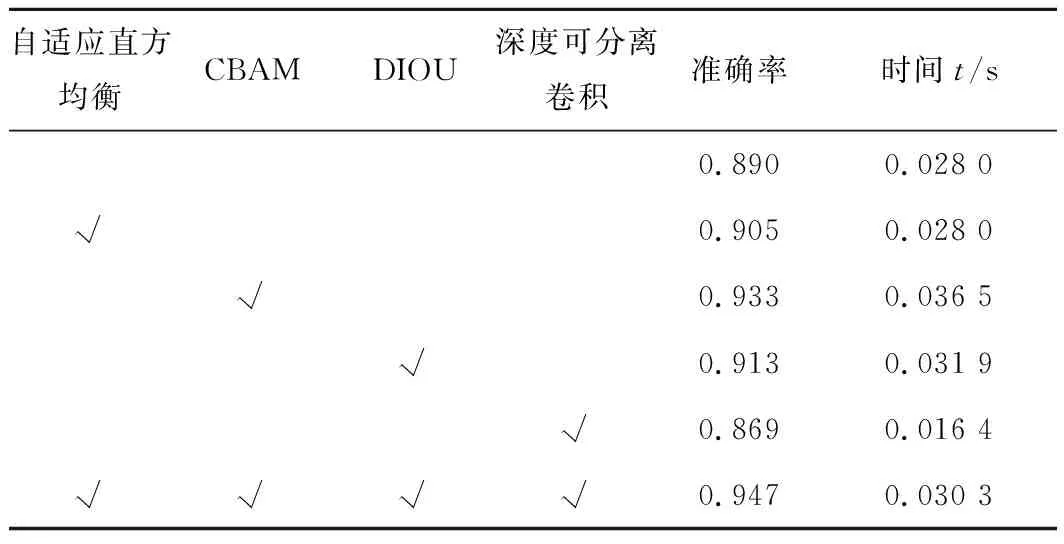
表2 消融實驗結(jié)果
表2中第1行為原始YOLOv5(采用GIOU損失函數(shù))網(wǎng)絡(luò)的檢測結(jié)果。通過表2可以看出,當(dāng)原網(wǎng)絡(luò)加入自適應(yīng)直方均衡模塊后,可以提高圖像的對比度,減少煤塵干擾,從而使檢測精度提高了1.5%;加入CBAM模塊后可以提升異物目標在復(fù)雜環(huán)境中的特征表達能力,其檢測精度相比于原網(wǎng)絡(luò)提升了4.3%;當(dāng)損失函數(shù)改為DIOU后,檢測精度在原網(wǎng)絡(luò)基礎(chǔ)上提高了2.3%;當(dāng)引入深度可分離卷積后,檢測精度相比于原網(wǎng)絡(luò)雖然下降了2.1%,但檢測速度提高了25.3 fps;本文算法綜合了各模塊的優(yōu)點,檢測精度可達94.7%,并且具有較好的實時性。
為了衡量本文算法對運動模糊圖像的有效性,選取Brenner函數(shù)、SMD2(灰度方差)和Vollath函數(shù)[30-31]作為客觀評價指標來評價圖像的清晰度,3個指標數(shù)值越大表示圖像越清晰,其表達式分別為
DB(f)=∑y∑x|f(x+2,y)-f(x,y)|2
(11)
(12)
(13)
式中,f(x,y)為像素點(x,y)的灰度;DB(f)為Brenner函數(shù)清晰度計算結(jié)果;DS(f)為SMD2清晰度計算結(jié)果;DV(f)為Vollath函數(shù)清晰度計算結(jié)果;μ為整幅圖像的平均灰度;M和N分別為圖像的寬和高。
隨機選取1 000張輸送帶圖像進行測試,并利用上述3個指標進行評價,其中以輸送帶靜止時獲取的圖像為基準(清晰圖),對3個指標歸一化后得到的結(jié)果見表3。

表3 清晰度評價
從表3可以看出,對模糊圖像經(jīng)過自適應(yīng)直方均衡處理后圖像清晰度有所提升,但是依然存在圖像模糊問題,這也給后續(xù)目標檢測帶來一定的挑戰(zhàn)。
為了驗證本文算法的優(yōu)點,選取了含有煤塵干擾、存在運動模糊以及光照不均3種典型場景進行測試驗證,如圖8(a)所示。為了分析方便,圖8(a)中待檢測的大塊異物目標已用紅色虛線框標注。為了描述方便用MK表示檢測到的大塊異物,選取SSD,YOLOv3,YOLOv4和YOLOv5 四種經(jīng)典檢測算法與本文提出的檢測算法進行比較,檢測結(jié)果如圖8(b)~(f)所示。

圖8 檢測結(jié)果對比Fig.8 Comparison of test results
從第1組實驗可以看出,由于煤塵干擾造成待檢測目標與背景環(huán)境灰度值較為接近,利用SSD,YOLOv3,YOLOv4以及YOLOv5算法檢測時均存在漏檢,而本文算法由于采用自適應(yīng)直方均衡操作增強了圖像的對比度,提高圖像的清晰度,在一定程度上可以減輕煤塵干擾,進而能夠有效檢測出所有異物目標。
從第2組實驗可以看出,由于輸送帶的高速運動造成獲取的圖像較為模糊,4種對比算法均存在不同程度的漏檢,而本文算法由于引入深度可分離卷積精簡原網(wǎng)絡(luò)模型參數(shù)提高了網(wǎng)絡(luò)的檢測速度,并且通過優(yōu)化損失函數(shù)提升了整個網(wǎng)絡(luò)的檢測精度,從而可以實現(xiàn)高速運動背景下的異物目標準確檢測,較好的解決了由于運動引起的目標漏檢問題。
從第3組實驗可以看出,受光照影響,待檢測的大塊異物目標區(qū)域亮度較高,尤其是圖8中下方的異物目標與周圍背景較為相似。從實驗結(jié)果可以看出各種對比算法只能檢測出原圖中上方的異物目標,對于下方的異物目標均存在漏檢。而本文算法引入了CBAM模塊,通過利用該模塊的通道注意力使網(wǎng)絡(luò)自動獲取每個通道的重要程度,并將每個通道的信息與權(quán)重共享的多層感知器進行疊加從而賦予每個通道不同的權(quán)重來強化目標特征;通過利用CBAM模塊的空間注意力為特征圖中每個位置生成權(quán)重并加權(quán)輸出,增強目標特定區(qū)域的同時弱化不相關(guān)的背景區(qū)域,從而進一步增強異物目標的特征表達能力,使檢測網(wǎng)絡(luò)注意力偏向異物目標,進而能夠準確檢測出目標,較好的解決了漏檢問題。
為了進一步驗證本文算法優(yōu)勢,將其與上述4種對比算法在相同數(shù)據(jù)集和訓(xùn)練環(huán)境下進行客觀指標對比,檢測結(jié)果見表4。
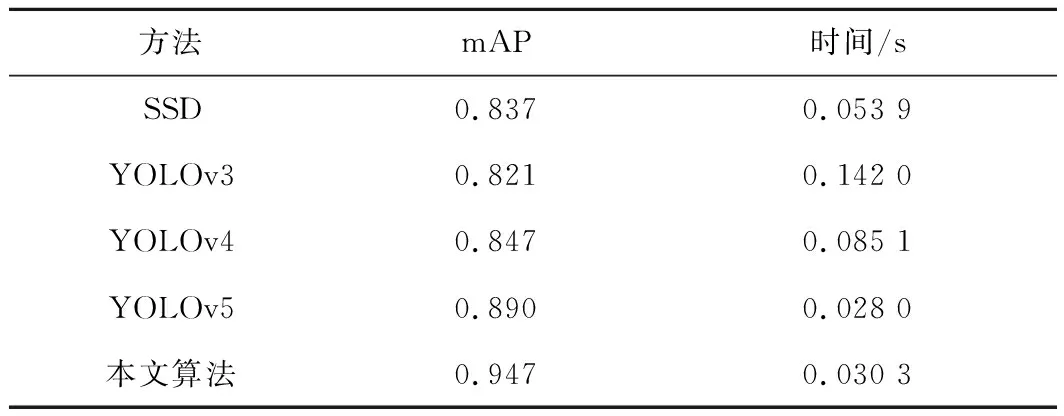
表4 客觀指標對比結(jié)果
從表4的對比算法檢測結(jié)果可以看出,本文算法在檢測精度上明顯高于其他4種檢測算法,檢測速度雖然略低于YOLOv5,但相比于其他對比算法具有明顯優(yōu)勢。
4 結(jié) 論
(1)采用自適應(yīng)直方均衡對圖像進行預(yù)處理可以減少煤礦井下煤塵對圖像的干擾,提高數(shù)據(jù)集質(zhì)量。通過引入深度可分離卷積可以提升網(wǎng)絡(luò)的檢測速度,通過優(yōu)化損失函數(shù)可以提高網(wǎng)絡(luò)檢測精度。在YOLOv5檢測模型中引入CBAM注意力機制可以有效解決復(fù)雜環(huán)境中異物目標顯著性較弱,進而導(dǎo)致其難以準確檢測的問題。
(2)通過大量實驗結(jié)果證明本文算法對于分辨率為1 280×720的圖像平均檢測精度可達94.7%,檢測速度為3 1fps,優(yōu)于SSD,YOLOv3,YOLOv4以及YOLOv5算法。
(3)受實驗樣本數(shù)量限制,實驗結(jié)果中的檢測精度有限,但是隨著后期樣本的擴充,所提出的檢測網(wǎng)絡(luò)精度將會進一步提高。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54