航天器機械臂柔性力控輔助裝配策略
2023-01-07 03:09:18譚震京郝進宇
信息記錄材料 2022年11期
關鍵詞:機械
譚震京,郝進宇,王 珊
(北京市首都航天機械有限公司 北京 100076)
0 引言
近年來,世界范圍內對于航天工業(yè)的重視程度逐漸上升,對太空進行控制成為各個國家的重要戰(zhàn)略目標之一,因此,提升航天器的制造效率與制造質量至關重要。機械臂對于航天器裝配中大重量零部件的裝配具備十分重要的意義,能夠有效提升航天器裝配過程中某些工序的裝配效率與裝配質量。本文對航天器裝配的特點、機械臂控制方式等內容進行分析,試圖提出一種應用性較強的航天器機械臂柔性力控輔助裝配策略。
1 機械臂與機械臂常見控制方法
機械臂是現(xiàn)代工業(yè)生產(chǎn)中重要的輔助型設備,指的是高精度、多輸出、多輸入的復雜系統(tǒng),其主體結構通常包括連接部位、關節(jié)組件等,能夠通過電流實現(xiàn)對主體結構的控制,進而輕易實現(xiàn)對重量較大物體的精確搬運,這種功能在工業(yè)生產(chǎn),尤其是工業(yè)設備裝配過程中能夠發(fā)揮十分重要的作用。與傳統(tǒng)的人工安裝相比,機械臂具備非常多的優(yōu)勢,主要體現(xiàn)在載重、精度、工作效率等方面,在工作中,尤其是大重量零部件安裝與制造過程中,能夠實現(xiàn)穩(wěn)定保持與精確調整,進而解決大重量設備的安裝問題,最終提升具體裝配過程的安全與穩(wěn)定[1]。
當前機械臂的常見控制方法包括:(1)在機械臂的中控系統(tǒng)中,采用計算機技術對其內部程序進行固定,通過這種方式將機械臂的運動進行固定化,并在工作中進行重復性動作,這種方式是最為常見的控制策略,在工業(yè)生產(chǎn)線上十分常見。(2)在機械臂上植入視覺傳感器,根據(jù)生產(chǎn)目的對圖像中的目標進行識別定位,并進一步對機械臂的運動進行控制,這種方式在自動化物流系統(tǒng)中的應用比較常見,要求相關物體必須具備可視覺識別定位的特征。(3)采用操作桿等方式對機械臂進行手動控制,這種方式主要應用于機械臂自主調試以及機械臂遠程控制等工作環(huán)節(jié),這種方式能夠添加人的主觀意識,能夠保障裝配過程的安全性,但是人與機器通常很難實現(xiàn)完美的協(xié)調,在工作中很容易出現(xiàn)誤操作[2]。(4)柔性控制方法。即根據(jù)配件的實際情況,采取不同的機械臂控制方式,柔性控制方法主要包括被動柔順、主動柔順兩個主要種類。其中,被動柔順指的是,將柔性機械裝置放置在整個機器的末端部位,能夠幫助機械臂更好地提升對于外部因素的感知能力,主動柔順是依靠力傳感器的反饋信息,對機械臂的運動軌跡進行及時修正以實現(xiàn)對接觸力的有效控制[3]。
與傳統(tǒng)的大規(guī)模工業(yè)生產(chǎn)相比,航天器的生產(chǎn)與裝配通常表現(xiàn)為小批量,甚至在生產(chǎn)實踐中,存在為了滿足航天器的某種需求特意制作出某個具備特殊外形、材質與功能構件的情況。裝配工況并不是十分固定,因此,在復雜多變的航天器安裝情境中,如何充分發(fā)揮機械臂的獨特優(yōu)勢,解決大質量設備的安裝問題一直都是相關單位在執(zhí)行航天器制造與安裝任務時必須充分考慮的重要問題。針對這一特征可知,航天器的安裝需要機械臂具備充分的柔性以適應不同的裝配約束條件。柔性控制方法能夠很好地適應航天器的裝配工作,在現(xiàn)實工業(yè)生產(chǎn)中,如果想要實現(xiàn)柔性隨動控制,就必須對負載重力的影響進行補償[4]。
2 機械臂柔性力控輔助裝配技術與原理
2.1 機械臂柔性力控輔助裝配
基于航天器的實際裝配需求,本文試圖提出一種機械臂柔性力控裝配方式,這種方式的具體操作方法為,技術人員在機械臂末端安裝六維力傳感器,通過這一設備對信息進行收集,在信息收集完畢之后,整個機械臂的控制系統(tǒng)能夠通過算法對人手作用力產(chǎn)生的相關信息數(shù)據(jù)進行計算。在所有計算結果得出之后,技術人員就能夠根據(jù)上述結果對機械臂進行控制,實現(xiàn)負載柔性跟隨人手運動。這種方式的優(yōu)勢在于,操作人員能夠在自身思想的指引下,通過自身較小的力量控制機械臂,實現(xiàn)對大重量工件姿態(tài)的調整工作,這種方式在保障靈活性的同時極大降低了工作難度,本文的研究內容綜合了機械本身的高效率與精密性等優(yōu)勢,并將人工的相關優(yōu)勢也充分發(fā)揮出來,能夠滿足航天器的裝配需求[5]。
2.2 機械臂柔性力控輔助裝配原理
機械臂柔性力控系統(tǒng)的主要結構一般包括機械臂本身、六維力傳感器、末端執(zhí)行器、工件,在工作人員的操作下實現(xiàn)整個系統(tǒng)的穩(wěn)定運行。其中,六維力傳感器是整個系統(tǒng)的核心部件之一,能夠實現(xiàn)對空間任意力系中的三維正交力、三維正交力矩的有效測量。
六維力傳感器直接感知到的力、力矩信息是機械本身負載重力、人手力量的綜合作用結果,因此,一般需要負載進行補償,才能獲取到完整的人手力、力矩數(shù)據(jù)。同時,當機械臂在運動過程中發(fā)生末端姿態(tài)變化,那么六維力傳感器、負載的空間姿態(tài)也會發(fā)生比較明顯的變化。為了確定力的具體變化情況,研究人員進行了具體的柔性力控算法設計。
3 航天器機械臂柔性力控輔助裝置的系統(tǒng)組成
本文所提出的機械臂柔性力控系統(tǒng)的主要結構包括工控機、機械臂控制器、機械臂、大六維傳感器、小六維傳感器、末端執(zhí)行器、工件。
在本文提出的柔性力控系統(tǒng)中,工控機主要承擔的是信號的采集與處理功能,并能夠根據(jù)受理信息,通過算法生成機械臂的運動指令,并將該指令發(fā)送到機械臂中,實現(xiàn)控制機械臂運動姿態(tài)的基本目標。大六維傳感器在實踐中普遍具備較大的量程,因此,此構件在實踐中一般安裝在機械臂與工件之間,用來檢測機械臂受到的整體外部作用力,在通過重力補償算法消除負載重力影響之后,就能夠實現(xiàn)對負載受到的外部作用力的有效感知,在實踐中主要指的是人手作用力等,從工作效果角度來看,單獨使用大六維傳感器就能夠基本實現(xiàn)對于負載的柔性隨動控制。
為了更好地發(fā)揮出機械臂的性能,提升航天器裝配作業(yè)的精確性,技術人員在機械臂末端放置了小六維傳感器。與大六維傳感器相比,小六維傳感器的量程相對較小,具備相當強的測量靈敏度,在正常的裝配作業(yè)中,小六維傳感器一般不會發(fā)揮出作用。其應用場景相對較小,僅應用在需要感知人手作用力的場景,例如,航天器的艙體空間一般相對較小,在進行大體積工件的安裝時,很容易出現(xiàn)工人無法進入、不能直接進行精確化裝配操作的情況,而大六維傳感器又很難實現(xiàn)對人手操作的精確感知,此時,技術人員就可以利用小六維傳感器的高靈敏度,實現(xiàn)對工件位置的精確調整。同時,在這一技術操作背景下,大六維傳感器也存在一定的價值,即能夠對工件本身的碰撞情況進行檢測,防止由于安裝不當、力度過大導致工件出現(xiàn)碰撞,進而導致航天器受損的現(xiàn)象發(fā)生。由此可見,航天器機械臂柔性力控輔助裝置具備相當強的科學性,能夠滿足大部分場景下的航天器裝配應用需求。
4 航天器機械臂柔性力控輔助裝配的柔性力控算法設計
4.1 負載重量與重心位置測量
根據(jù)機械臂的作用原理可知,如果沒有其他外力的作用,那么本文所采用的六維傳感器所收集到的全部信息內容都是由機械本身的重力所引起的,由此可知,在實際操作過程中,技術人員只需要對機械臂本身進行控制,將機械臂分別表現(xiàn)出不同的姿態(tài),并采用六維傳感器進行測算,就能夠非常簡單地從中取得各種不同姿態(tài)下的測量數(shù)據(jù),再對這些數(shù)據(jù)內容進行綜合比較,就能夠獲取到負載重量以及中心位置的具體數(shù)據(jù)值[6]。
根據(jù)計算可知,六維力傳感器的坐標系為空間直角坐標系,假設其負載重心坐標為(x,y,z),負載重力為G,那么其在x,y,z軸上的分量分別為Gx、Gy、Gz。同時,對x,y,z軸的作用力矩分別為Mgx、Mgy、Mgz。根據(jù)力學關系可以得到以下公式:

即
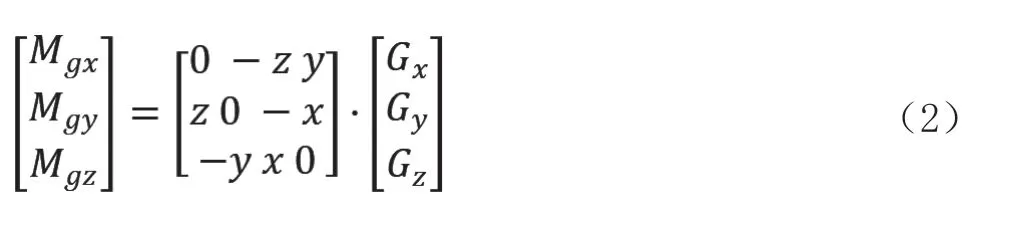
在實踐中,當機械臂的末端姿態(tài)發(fā)生變化之后,上述所有數(shù)據(jù)都會發(fā)生變化,取不同的負載姿態(tài)由六維力傳感器所測得的多組數(shù)據(jù),采用相關計算方式,即最小二乘法,技術人員就能夠對負載重心的實際坐標位置進行準確判斷。
4.2 負載重力補償?shù)拇_定
在人力作用的情況下,整個系統(tǒng)的力、力矩組合情況會發(fā)生比較明顯的改變,本文對其進行初步假設,即在人力作用的背景下,負載分量為Hx、Hy、Hz,三個力矩分量為Mx、My、Mz。
在操作人員對機械臂進行柔性隨動控制的過程中,負載重力的方向也會發(fā)生變化,具體變化姿態(tài)應當與機械臂末端姿態(tài)具備較強的一致性,假定重力與六維傳感器在坐標系x,y,z軸中的夾角分別為a,b,c,這可以得出負載重力在坐標系中的投影,具體為:

在以上公式中,Gx、Gy、Gz分別表示的是六維傳感器測定力分量中負載重力的內容,將這一內容與坐標代入相關公式,就可以得到具體的作用力矩數(shù)據(jù),即Mgx、Mgy、Mgz。在此基礎上,可以進一步得到人手作用力在坐標軸上的分量:

人手力矩在坐標軸上的分量為:

4.3 柔性力控
在上文中,已經(jīng)基本確定了人手作用的力、力矩信息與計算方式。在這一背景下,研究人員初步擬定了兩種工作場景的具體操縱方式:(1)大范圍移動工件。此時,機械臂的移動距離可以由人手作用力與一個固定系數(shù)相乘進行計算,在實際工作情境中,這個固定系數(shù)的具體數(shù)字可以根據(jù)實際情況進行調整確定[7]。(2)小范圍調整工件,大體積工件的小范圍調整在航天器制造過程中是一個比較常見的工序,在這一過程中,可以將工件的移動距離設定為一個固定值,并給人手作用力設定一個閾值,當人手作用力超過閾值時,則控制工件移動一個固定值,如果人手作用力小于等于閾值時,則機械臂保持靜止狀態(tài)。為了防止人手持續(xù)作用導致精確度下降,應當設定移動一個固定值后暫停,待人手作用力降到閾值之下并重新上升至閾值之上時才能繼續(xù)移動的流程[8]。
4.4 實踐分析
為了進一步確定本文的理論研究內容在實際工作環(huán)節(jié)是否能夠發(fā)揮出作用,研究人員在實踐中設計了一個真實工況,并采用本文提出的技術內容進行了安全實驗。
具體安裝工況為:工件質量為102 kg,需要安裝到一個與工件大小幾乎相似的腔體內部,同時不能對腔體周邊進行磕碰,工件在實際操作過程中允許進行活動的空間在3 mm 左右。
在這一工況下,采取人工安裝的方式非常影響安裝質量與安裝效率,甚至可能會對機器艙壁造成磕碰,最終影響機械設備的正常運行。在驗證實驗中,制作重量、重心位置等指標與真品完全一致的模擬器件,并提供與真實工況完全一致的安裝條件。在具體安裝過程中,采取本文提出的柔性力控方式,在距離較遠時采取模式1(大范圍移動工件力控模式),在距離較近的時候采取模式2(精細化安裝力控方式)。總安裝用時為35 min,安裝質量良好,機械未發(fā)生磕碰,與傳統(tǒng)人工安裝用時需要的5 h 相比,其工作效率、工作質量均有了非常大的提升,能夠滿足航天器工作的基本需要。
5 結論
綜上所述,隨著時代的發(fā)展,航天器生產(chǎn)與制造已經(jīng)成為我國工業(yè)生產(chǎn)的重要組成部分,對于我國空天戰(zhàn)略目標的實現(xiàn)具備十分重要的價值與意義。在航天器裝配過程中,大重量工件的裝配一直都是工程的重難點。本文提出了一種柔性力控輔助裝配辦法,確定負載重量、重心位置、柔性力控,并結合實際情況,初步驗證了該方式確實能夠在現(xiàn)實中航天器裝配工作中發(fā)揮一定的價值與作用,并保證安裝過程的穩(wěn)定性。
本文的力控算法相對比較粗糙,在精確度方面依舊存在較大的提升空間。希望相關單位可以以本文的研究內容作為參考,并結合自身的實際情況,對具體操作方式進行進一步更新,解決航天器裝配過程中產(chǎn)生的各種問題。相關理論學者也可以在本文研究的基礎上,提出精確度更高、穩(wěn)定性更強的機械臂力控優(yōu)化方案,進而提升我國航天工業(yè)的整體質量,最終為我國空天戰(zhàn)略目標的順利實現(xiàn)提供必要的技術支持與理論保障。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發(fā)展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09