狹窄及隱蔽地下空洞三維探測系統的研制
2023-01-08 14:09:08夏永華楊明龍簡小婷
軟件導刊 2022年10期
關鍵詞:系統
朱 琪,夏永華,王 沖,楊明龍,簡小婷,朱 文
(1.昆明理工大學國土資源工程學院;2.云南省高校高原山區空間信息測繪技術應用工程研究中心,云南昆明 650093;3.昆明理工大學城市學院,云南昆明 650051;4.中國電建集團昆明勘測設計研究院有限公司,云南昆明 650041;5.云南省基礎地理信息中心,云南昆明 650034;)
0 引言
近年來,國家大力推進基礎設施建設,其中會遇到各種類型的地下巖溶地質問題[1],導致地基承載力不足、不均勻沉降、地基滑動、塌陷等問題發生,對工程建設和人員安全可能會造成極大危害[2]。因此,必須妥善治理地下空洞。
治理的前提是需要精確了解地下空洞的大小、形狀、走向等數據。但在實際測量過程中,通常由于下放孔徑小、空間形態復雜、埋深大、人員及測量設備無法到達、安全風險大等因素,難以準確測量空洞數據。
傳統地下空洞探測手段包括地質鉆探、電法、三維探測成像儀、鉆孔電視、地震反射和探地雷達等,但此類常規探測手段只能定位地下空洞的大致位置,無法精確探明地下空洞的三維形態和體積[3-4]。許漢華等[1]將鉆井電視放入鉆井孔內查明空洞、溶洞充填物等,但由于設備的局限性,僅能檢測以探頭為中心兩米內的范圍。李婕[5]采用地質雷達從地表上向地下發射高頻電磁波,但該方法只能探測公路路基中溶洞的深度、介質特性。石學錄等[6-7]通過鉆孔地質三維探測成像儀檢測溶洞內部情況,但該方法僅能分析鉆孔周圍巖體4 個方向的距離、形狀及平面體積和鉆孔的夾角。因此,傳統探測手段存在獲取形態和體積難度大、實時性弱、探測精度低、直觀性差等問題。
目前,不少學者采用三維激光掃描技術對空洞進行勘探,該方法是現階段獲取空間數據的重要手段,具有高效率、精度高、無接觸等優勢。現有裝置包括Optech 公司的洞穴掃描系統CMS、GeoSight 公司的集成式三維激光測量系統礦晴MINEi、MDL 公司的地下空間三維激光掃描系統C-ALS[8]等,此類設備主要應用于礦山空區、巷道,測量精度高,但價格十分昂貴。
為滿足實際應用需求,采用消費級二維激光雷達來實現以上設備功能。蔡澤宇等[9-10]采用二維激光雷達搭載上下行程云臺,構建一個三維空間掃描系統,只對研究目標的三維模型進行輪廓識別。黃風山等[11-16]利用旋轉工作臺或俯仰裝置與二維激光雷達相結合,構建一種旋轉二維激光雷達三維掃描測量系統,但掃描范圍和角度均在90~180°間,有效范圍微乎其微,難以滿足實際需求。
針對上述問題,本文設計一種適用于地質勘探領域,獲取地下空洞三維數據的系統。該系統通過自主研發的激光掃描探頭采集數據,并開發了相對應的裝置控制、數據轉換、數據處理與實時顯示軟件,以獲取地下狹窄隱蔽空洞的三維點云數據,并對系統進行可行性實驗和精度分析。
1 地下空洞三維探測系統
地下空洞三維探測系統(Underground Cavity Detection System-3D,UCDS-3D)主要由激光掃描探頭、固定支架、控制器、連接支桿及系統配套軟件組成,如圖1所示。
UCDS-3D 系統在探測勘探過程中,遇到的地下隱伏巖溶等其它空洞(見圖2)時,既能自動獲取空洞的三維數據、視頻、照片等信息,又能探明巖石層信息、溶蝕、破碎等地下情況。
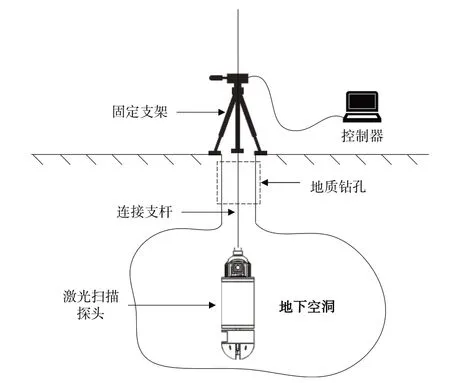
Fig.1 Composition of UCDS-3D system圖1 UCDS-3D系統組成結構
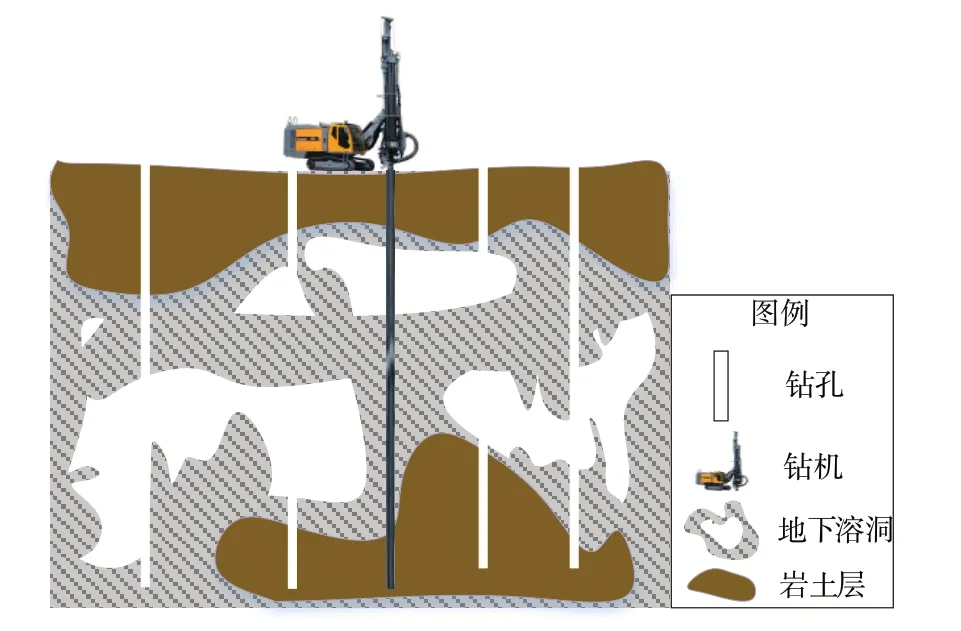
Fig.2 Underground cavity in geological exploration圖2 地質勘探的地下空洞
1.1 工作原理
UCDS-3D 系統的工作流程如圖3 所示,主要組件為激光掃描探頭。激光掃描探頭包括掃描端和探測端,掃描端采用低成本二維激光雷達,在每次掃描過程中雷達測距核心隨電機驅動呈順時針旋轉,對周圍環境進行全方位掃描,并發射調制后的紅外激光信號。目標物體的反射信號將被雷達視覺采集系統接收,然后經過處理器解算得到目標物體與雷達的距離、夾角信息,最后將數據統一輸出。
根據雷達運行規律,本文在配置驅動器、控制板、姿態系統等裝置的基礎上,增加一個與雷達二維坐標系垂直的坐標軸,以獲取目標三維數據。其中,探測端采用紅外高清攝像頭、驅動器、控制板等器件采集目標區域內視頻、照片等有效數據,探明巖層界面、溶蝕裂隙及破碎地帶,分辨空洞與溶洞充填物;外置控制器USB_485 端口與激光掃描探頭中的單片微型計算機(Micro Controller Unit,MCU)的TTL_485 端口連接,操控MCU 控制探頭進行數據采集、機械驅動、電壓輸送、數據信號傳輸等操作。
1.2 硬件組成
UCDS-3D 系統硬件主要由激光掃描探頭、固定支架和連接支桿構成。其中,固定支架和連接支桿使用現有設備;激光掃描探頭分包含上、中、下3 部分,上端為探測端,中端為驅動裝置、集成板和防護罩,下端為探頭端,規格為Φ10cm,H38cm,如圖4所示。
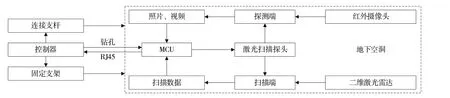
Fig.3 Flow chart of working principle of UCDS-3D system圖3 UCDS-3D系統工作原理流程圖
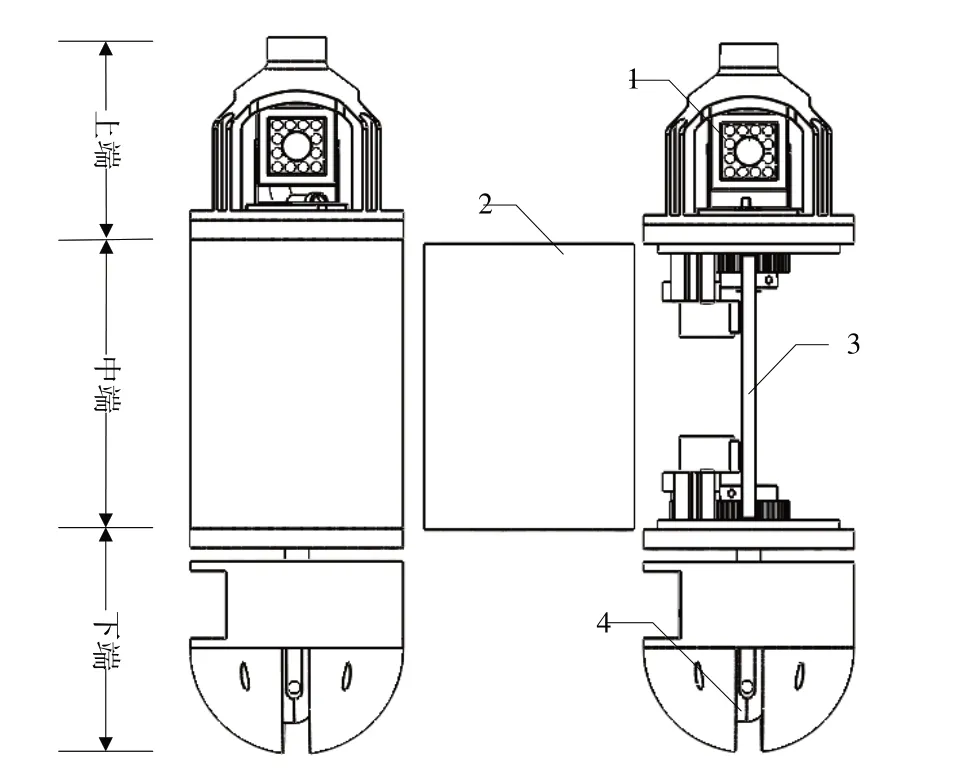
Fig.4 Composition of laser scanning probe圖4 激光掃描探頭的組成
二維激光雷達采用SLAMTEC 公司的RPLIDAR A3M1,該設備應用激光三角測距技術,配合高速視覺采集處理器,具備高達16 000 次/s 的高速激光測距采樣能力。在檢測遠距離物體、黑白物體切換及強光直射物體時,測距仍然保持穩定,可在25m 半徑范圍內進行全方位激光掃描測距,產生所在空間的平面點云地圖信息。RPLIDAR A3M1激光雷達具體參數如表1所示。
相較于其它品牌激光雷達,RPLIDAR A3M1 激光雷達具有以下優勢:①體積小,規格為Φ7.6cm,H4.1cm,幾乎是市場現有專業級或消費級二維、三維激光雷達中規格最小的激光雷達;②低成本;③性能強,A3M1 較于同價位二維激光雷達的性能更強。

Table 1 RPLIDAR A3M1 parameter表1 RPLIDAR A3M1參數
1.3 軟件開發
UCDS-3D 系統軟件包含雷達配置軟件Slamtec RoboStudio 和自主開發的UCDS-3D-Data Conversion,主要實現數據采集、數據轉換及數據的可視化、預處理等功能。
1.3.1 Slamtec RoboStudio
Slamtec RoboStudio 一款可擴展的機器人管理與開發的電腦桌面應用軟件,能夠提供Frame grabber(幀抓取器)插件與激光雷達建立通信,調試圖形化、控制器掃描速度,顯示掃描視圖,獲取激光雷達數據及狀態信息。
軟件包含Standard、Express、Boost、Sensitivity、Stability共5 種掃描模式,依據采樣頻率可將掃描模式量程分為6m、10m、16m、35m。在RPLIDAR 工作時,每個采樣點數據(見表2)將通過通訊接口進行輸出,輸出格式為文本。
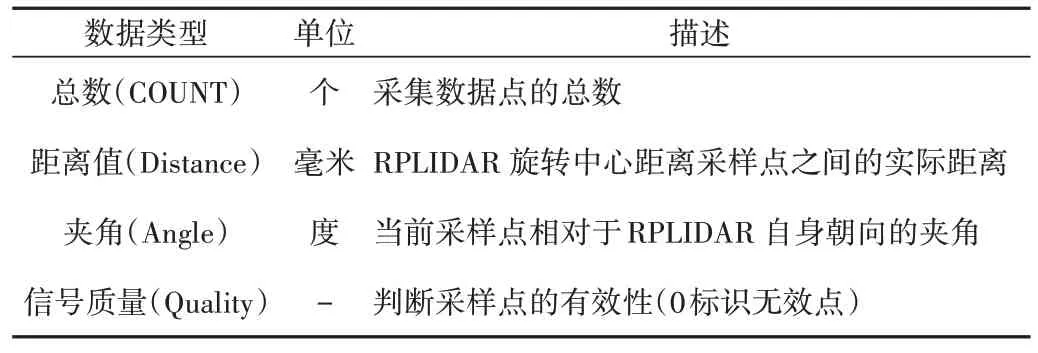
Table 2 Data information of RPLIDAR A3M1 sampling points表2 RPLIDAR A3M1采樣點的數據信息
1.3.2 UCDS-3D-DataConversion
地下空洞三維探測系統數據轉換及顯示軟件(UCDS-3D-Data Conversion and Visualization)是針對RPLIDAR 激光雷達自行開發的一款數據轉換及三維顯示軟件,主要包括文件輸入輸出、數據轉換和數據顯示3 個模塊。軟件整體設計流程如圖5所示。
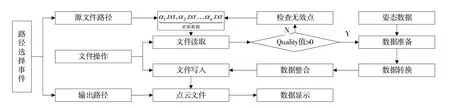
Fig.5 Flow chart of software design of UCDS-3D Data Conversion and Visualization圖5 UCDS-3D—Data Conversion and Visualization 設計流程圖
軟件基于Microsoft Visual Studio 2017(簡稱為VS2017)平臺,采用使用Q(t跨平臺C++圖形用戶界面應用程序開發框架)搭建框架,使用大型跨平臺開源C++編程庫點云庫(Point Cloud Library,簡稱PCL)進行開發。其中,PCL 集成三維信息顯示、處理的關鍵技術和算法,包含許多點云處理的通用算法和管理點云數據的高效數據結構;Qt 通過Qt Visual Studio Tools 插件將開發工具集成至Microsoft Visual Studio 中,便于后期使用可視化圖形界面編輯器Qt Designer 設計操作界面。
(1)數據轉換頁面。首先讀取多個激光雷達數據文件中的有效數據;然后基于新構建的三維坐標系統將其轉換為三維數據;接下來將三維點云數據通過通用格式進行整合并寫入新建文件;最后輸出tx(t文本文檔)和PCD(Point Cloud Data)兩種格式的數據。圖6為數據轉換界面。
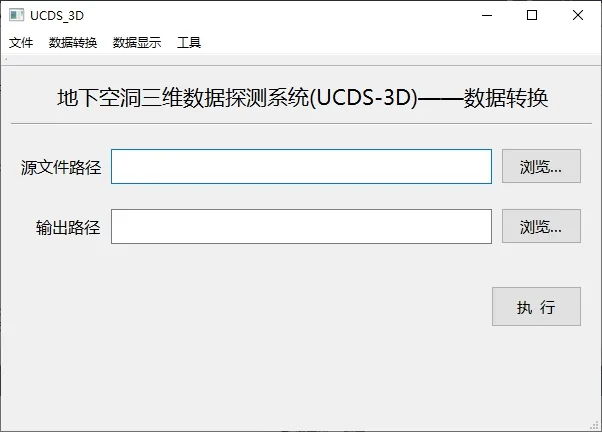
Fig.6 Data conversion interface圖6 數據轉換界面
(2)數據顯示頁面。數據顯示頁面實時顯示轉換后的三維數據,有助于操作者查看數據采集情況以分析數據的有效性,如圖7 所示。由于該軟件使用Qt 框架,需要首先使用Cmake 編譯對應版本PCL 的VTK 源文件;然后將編譯后的二進制文件放入Qt 文件夾中;最后在Qt Designer 工具欄中產生“QVTK Widgets”插件顯示功能,運用此插件顯示三維數據。此外,PCL 中包含眾多類庫,數據顯示頁面包括公共模塊(Common)、文件讀寫模塊(IO)、表面重建模塊(Surface)、可視化模塊(Visulization)。
2 UCDS三維坐標系的建立及轉換
UCDS 三維坐標系主要由UCDS-3D 地下空洞三維數據探測裝置的掃描端數據構建而成,該部分由雷達部分、驅動部分、傳動部分、控制部分、底盤組成。其中,雷達部分通過傳動部分與驅動部分相連,由驅動部分帶動雷達部分旋轉,為二維激光雷達增加第三維度,構建UCDS 三維坐標系。
2.1 轉換原理
A3M1 雷達掃描得到被測對象的二維信息,包括距離值d(旋轉中心距離采樣點之間的實際距離)和夾角θ(當前采樣點相對于雷達自身朝向的夾角),將其以極坐標形式進行保存,具體計算公式如下:

Fig.7 Data visualization interface圖7 數據顯示界面

A3M1 雷達遵循左手法則坐標體系,在二維激光雷達掃描平面上建立二維坐標系o-x1y1,坐標系原點為掃描核心的旋轉中心o,傳感器正前方定義為坐標系的x1軸(與二維激光雷達0°掃描光束的發射方向相同),y1軸的正方向與激光雷達90°掃描激光束的發射方向相同,具體坐標系定義如圖8 所示。根據式(2)將掃描平面上P點的極坐標(d1,θ1)轉換為直角坐標(x1,y1)。

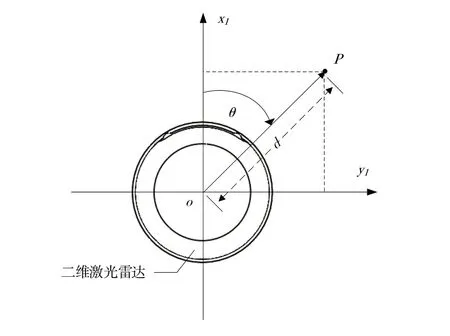
Fig.8 Definition of RPLIDAR A3M1 scanning data coordinate system圖8 RPLIDAR A3M1掃描數據坐標系定義
如圖9 所示,P點所在面為初始掃描面,在機械裝置的驅動下,雷達以掃描核心為中心且垂直于水平面方向上旋轉角度α后得到第二次掃描面,并獲取第二次掃描面上的P'點極坐標(d2,θ2)。此時,姿態系統輸出角度α(初始掃描面與第二次掃描面的二面角PoP')。
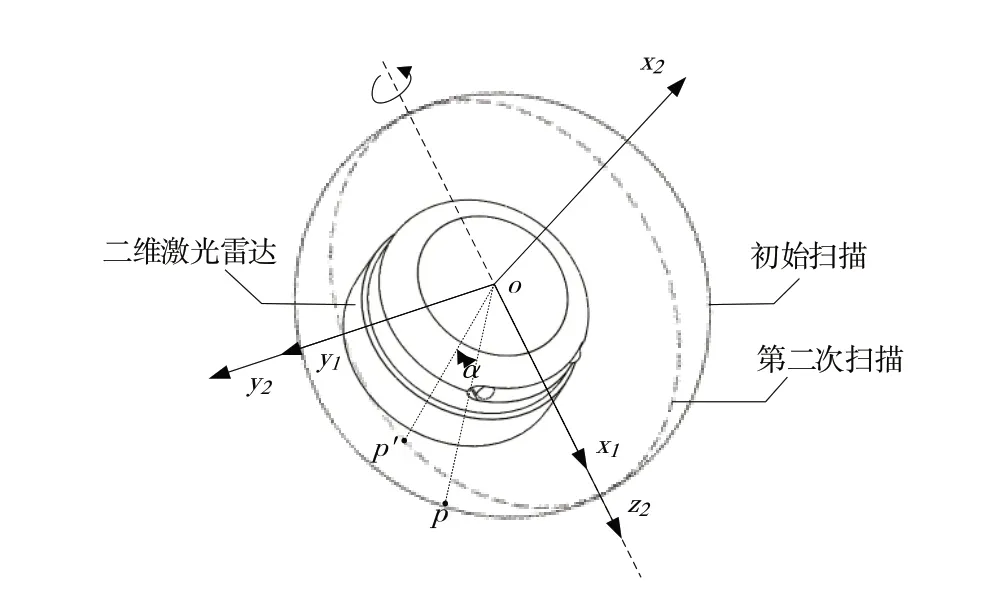
Fig.9 Establishment principle of UCDS three-dimensional coordinate system圖9 UCDS三維坐標系建立原理
為了整合激光雷達在同一位置不同垂直面的二維數據,需要以二維坐標系o-x1y1和對應掃描面旋轉角α為基礎,構建一個三維坐標系o-x2y2z2。其中,o為掃描核心的旋轉中心,x1軸則轉換為坐標系o-x2y2z2的z2,y1軸轉換為y2,然后由空間坐標系右手法則獲取x2。如圖10 所示,根據初始掃描和第二次掃描兩種情況將三維坐標系o-x2y2z2劃分為二維面x2oy2與二維面x2oz2,具體計算公式如下:
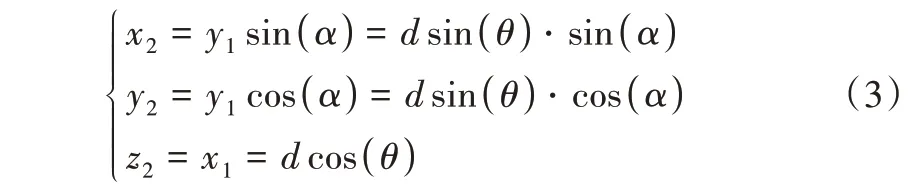
在三維坐標系o-x2y2z2中,初始掃描面上點P(d1,θ1)旋轉角為0°,極坐標形式為P(d1,θ1,0),根據式(2)、式(3)可得三維坐標P(0,d1sin(θ1),d1cos(θ1));同理,第二次掃描面上點P'(d2,θ2)旋轉角為α,極坐標形式為P'(d2,θ2,α),三維坐標為P(d2sin(θ2)sin(α),d2sin(θ2)cos(α),d2cos(θ2))。因此,二維激光雷達多次掃描的數據可由UCDS 三維坐標系進行表示。
2.2 坐標系轉換
將UCDS 坐標系下的三維數據轉換為國家大地坐標系,融合測繪、地質等各方數據,便于確定地下空洞的走向,有助于工程設計、施工和評價等方面使用。
如圖11 所示,UCDS 三維坐標系的原點為二維激光雷達掃描核心的旋轉中心o2,過中心垂直于激光雷達為坐標系的x2軸,y2軸的正方向與激光雷達90°掃描激光束的發射方向相同(平行于地面),激光雷達正前方為坐標系的z2軸(垂直于地面,與連接支桿同方向)。
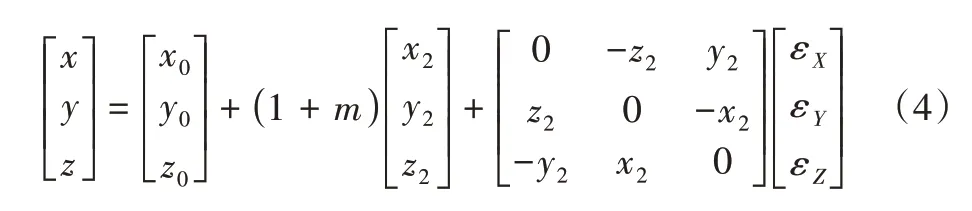
在固定支架上方添加一根標定桿(共有標靶點A、B、C)垂直于連接支桿,平行于二維激光雷達初始掃描方向。首先,通過測量工具獲取標靶點A、B、C 在CGCS2000 的絕對坐標A(xA,yA,zA)、B(xB,yB,zB)、C(xC,yC,zC)、AB 的水平距離DAB、BC 的水平距離DBC和標定桿到激光雷達的高差h。然后,在不考慮地球曲率、UCDS 三維坐標系、標定桿及地面相互限定等條件下,取得原點o2在CGCS2000 系的絕對坐標(xC,yC,zC-h),點A、B、C 在UCDS 三維坐標系下的相對坐標為A'(0,DAC,-h)、B'(0,-DBC,-h)、C'(0,0,-h)。坐標變換采用適用于任意兩個直角坐標系統相互變換的布爾莎七參數變換模型,如圖12 所示。坐標變換包含3 個平移參數x0、y0、z0和3 個旋轉參數εx、εy、εz,考慮到兩個坐標系尺度不一致,設定一個尺度變化參數m[17],相應的布爾莎七參數公式為:
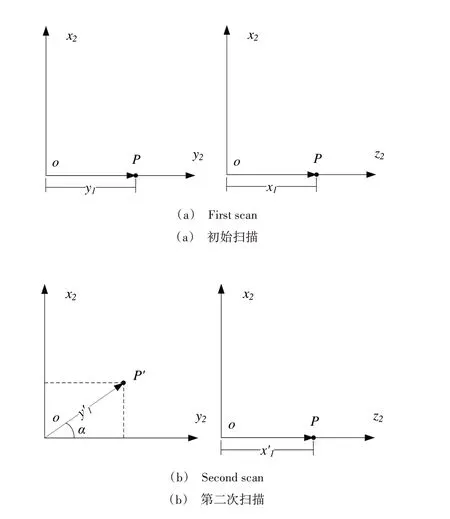
Fig.10 Exploded view of three-dimensional coordinate system圖10 三維坐標系o - x2y2 z2分解圖
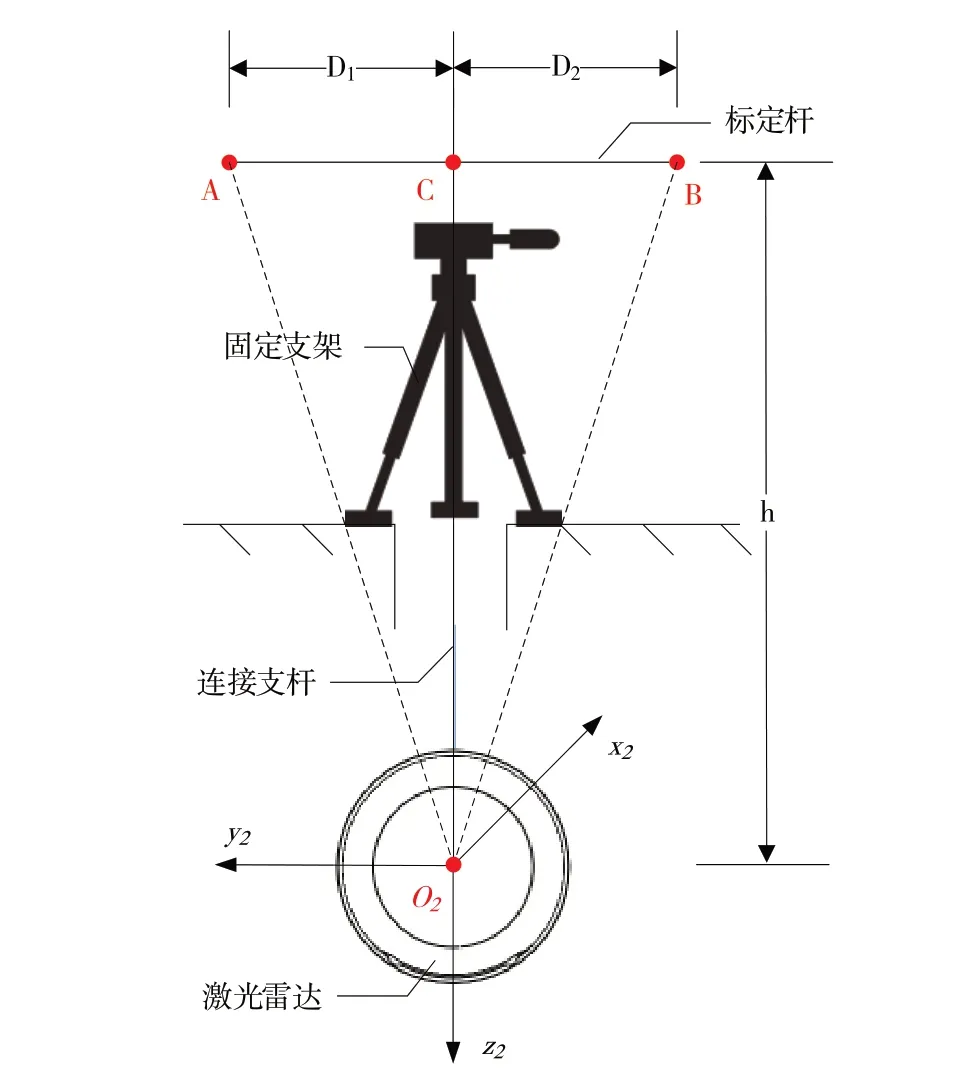
Fig.11 Diagram of coordinate system transformation圖11 坐標系轉換示意圖
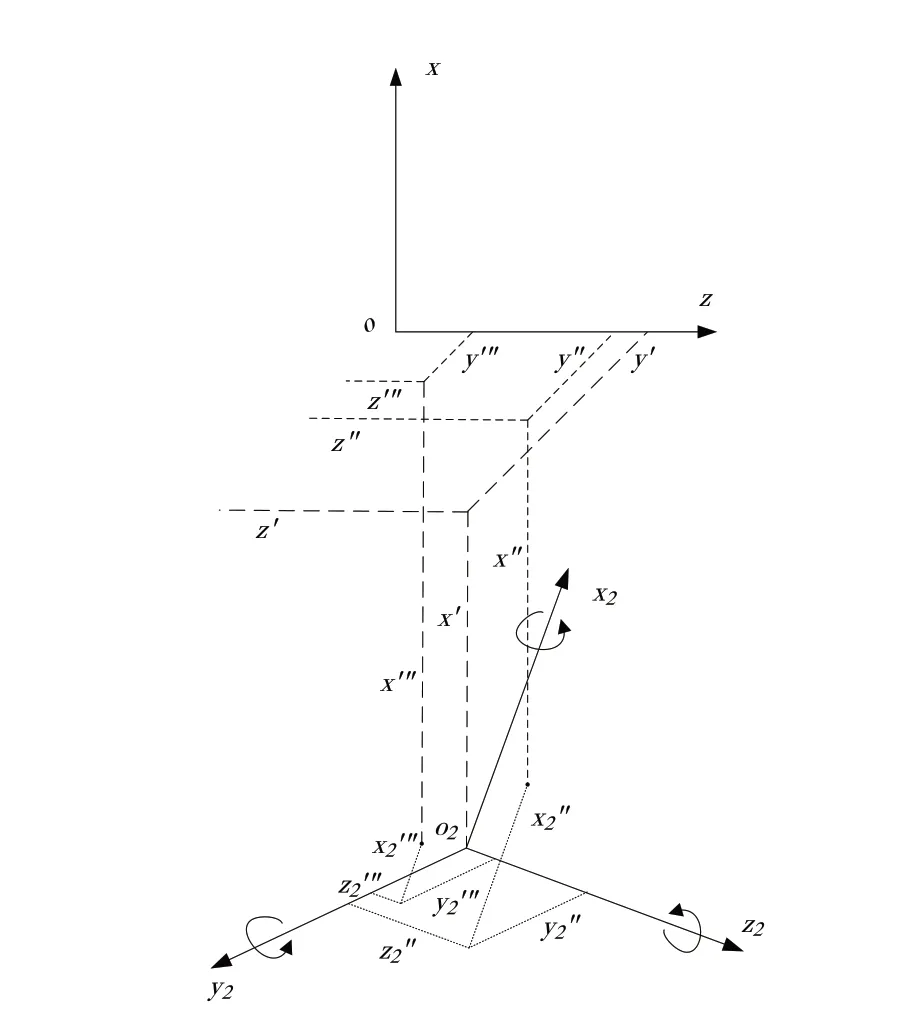
Fig.12 Bursa transformation model with 7 parameters圖12 布爾莎七參數變換模型
按最小二乘法對多個公共點求解轉換參數時,存在如下觀測方程:
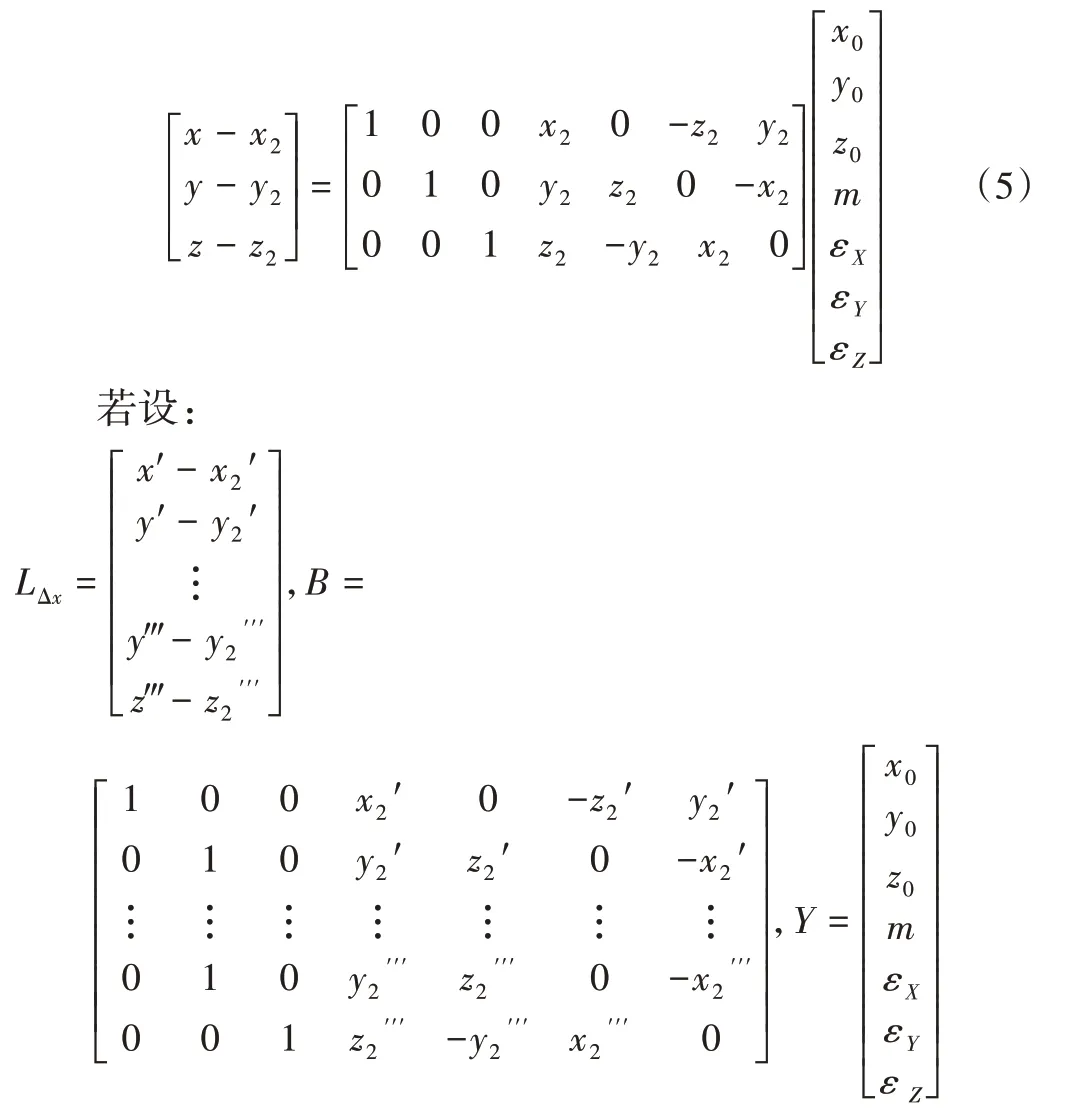
式(5)可轉化為誤差方程:

設觀測值等權觀測,則PLΔx=E,法方程為:

從而變換參數為:

通過變換參數,便可利用七參數將UCDS 三維坐標系下的三維數據轉換為CGCS2000國家大地坐標。
3 可行性分析
為了驗證UCDS-3D 系統的可行性和應用性,模擬實驗進行數據采集、轉換及預處理,并對實驗獲取的三維點云數據進行精度評價。
3.1 數據采集
采用一個大型紙箱(規格:2m×1m×1m)模擬地下空間場景,兩個小型紙箱(規格:0.49m×0.29m×0.52m,0.54m×0.42m×0.13m)增加模擬場景的復雜度。如圖13所示,連接支桿與激光掃描探頭組合置于固定支架上,距離地面大約2m,探頭位于大型紙箱中,傳輸線與控制器相連接進行數據采集。
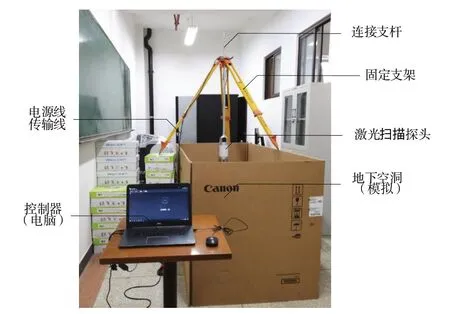
Fig.13 Simulation experiment scene圖13 模擬實驗場景
由于實驗設備和模擬場景受客觀條件限制,一次只能掃描局部場景。因此,需要從兩個方向進行掃描,第一個方向掃描旋轉角從0°開始、間隔3°旋轉掃描,每次旋轉后采集數據5~7s,共耗時約6min,獲取數據文件61 個,數據點52 182 個;第二個方向掃描將設備向后移動0.5m,掃描旋轉角從0°開始、間隔3°旋轉掃描,共耗時約6min,獲取數據文件61個,數據點52 460個。
3.2 數據轉換及預處理
將兩個方向采集的數據文件夾導入UCDS-3D-Data Conversion 軟件后輸出三維點云數據文本文檔。表3 為部分數據轉換前后比較。其中,轉換前參數包含激光雷達獲取的夾角、距離值、信號值和姿態系統獲取的旋轉角,轉換后參數包含對應點的x值、y值、z值。
數據轉換后,通過點云處理軟件查看數據情況,圖14(a)為第一個方向掃描三維點云數據,圖14(b)為第二個方向掃描三維點云數據。
由圖14 的三維點云數據可見,由于激光雷達會采集目標區域內所有數據,會造成數據冗余。同時,在采集過程中會受到采集設備自身精度、機械振動、周圍環境等因素干擾,產生一些小振幅噪聲點和稀疏離群點。因此,首先需要對點云數據進行去噪處理,使目標區域表面光順平滑,保持采樣表面原有的拓撲幾何特征[18],如圖15所示。
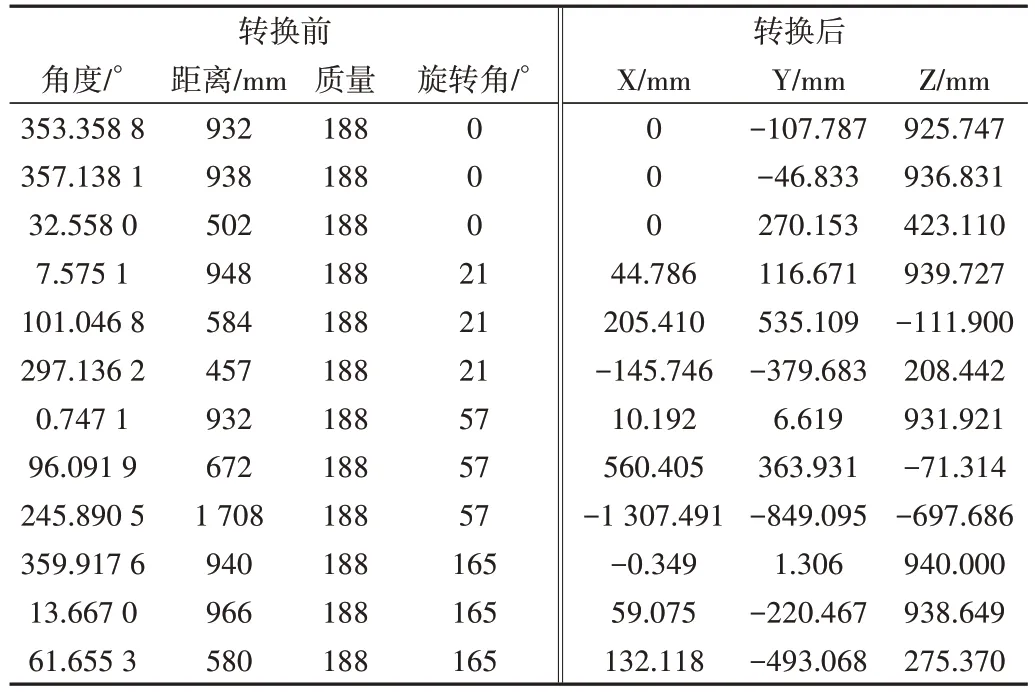
Table 3 Comparison of data before and after conversion表3 數據轉換前后比較

Fig.14 3D point cloud data of simulation scene圖14 模擬場景三維點云數據
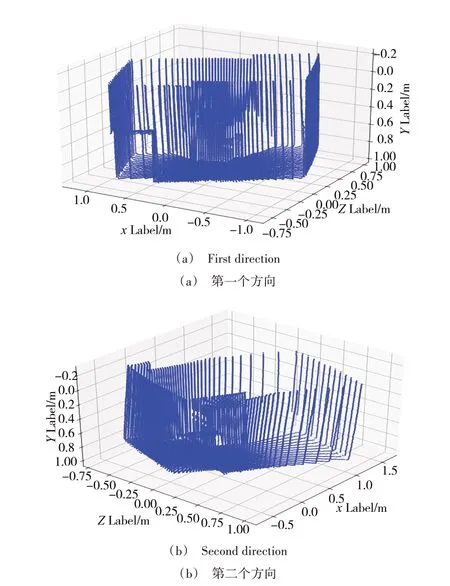
Fig.15 Denoising results of 3D point cloud data in simulated scene圖15 模擬場景三維點云數據去噪結果
由于每個方向基于特征匹配算法掃描得到的三維點云數據均具有獨立坐標系,包含多視點特性,不便于進行數據處理和分析。因此,首先需要先將兩個方向去噪后的三維點云數據進行配準,并將三維點云數據的局部幾何信息(例如曲率、法向量、鄰近點密度等)作為特征,尋找測試點集與參考點集的對應關系,結合迭代最近點技術完成配準操作,得到模擬場景三維點云數據,詳細配準細節見參考文獻[19-22],配準過程如圖16所示。
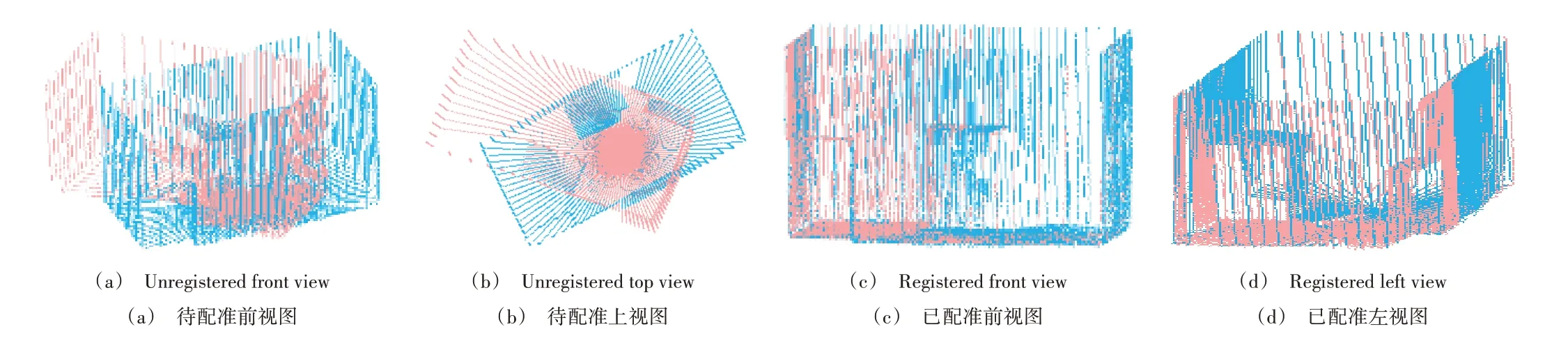
Fig.16 3D point cloud data registration process of simulated scene圖16 模擬場景三維點云數據配準過程
3.3 精度評價
為進一步檢測三維點云數據精度,在現場用鋼尺實測邊長與點云數據進行比較。中誤差m是衡量觀測精度的一種數字標準,絕對值愈小表示精度越高,計算公式如下:

式中,Δ 為測量值與實測值間的誤差,n為觀測次數。由表4 可知,設計的UCDS-3D 系統獲取地下空洞三維數據的中誤差為0.003 5m,基本滿足誤差精度要求。
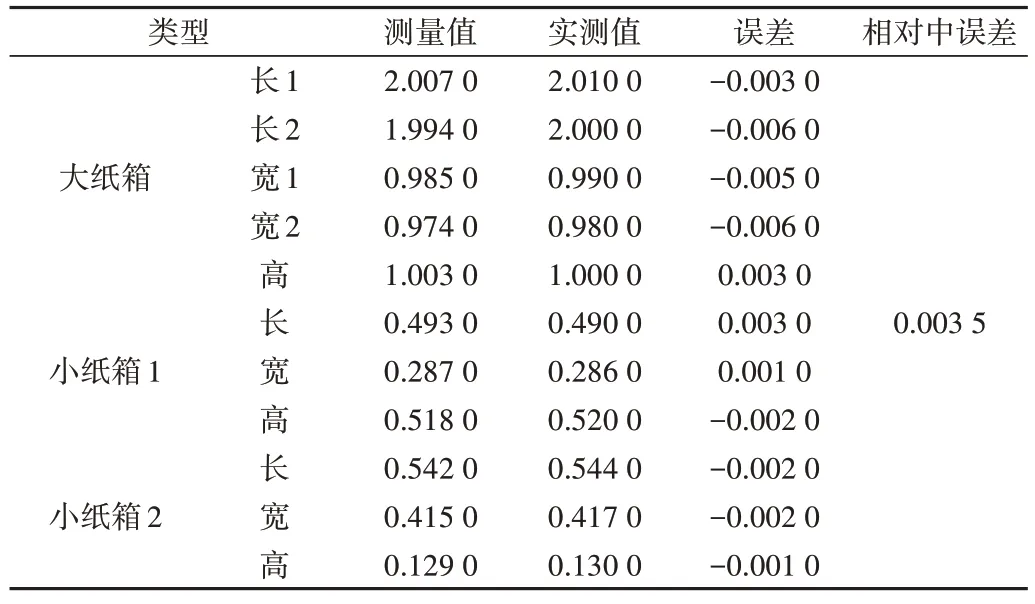
Table 4 Size comparison of edge between solid and 3D data表4 實體與三維數據的邊長尺寸對比 (m)
3.4 實地試驗
為了驗證地下空洞三維探測系統在實際復雜環境中的效果,將系統應用于實際環境(如圖17)中進行試驗。
圖18 為探測端采集地下空間的照片,掃描端耗時約7min,獲取數據文件68 個,數據點54 929 個,經轉換后如圖19(a)所示,并運用PCL 的上采樣算法對原始數據進行處理,如圖19(b)所示。

Fig.17 Actual scene of underground cavity圖17 地下空洞實際場景
4 結語
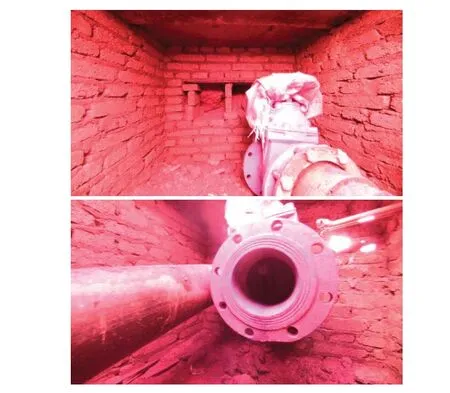
Fig.18 Shooting scene map at detection end圖18 探測端拍攝場景
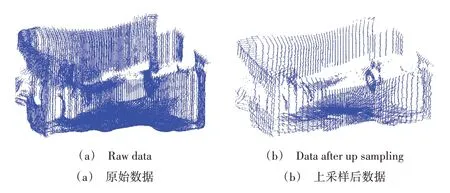
Fig.19 3D point cloud data of actual scene圖19 實際場景三維點云數據
本文提出一套地下空洞三維探測系統,能夠精確勘探地下空洞的空間形態、體積、空洞走向等信息,為地質設計、空洞治理和工程施工提供了可靠的基礎資料。系統首先通過UCDS-3D 地下空洞三維數據探測設備采集地下空洞數據;然后利用Data Conversion 軟件對數據進行轉換、點云去噪、配準等處理;最后采用布爾莎七參數變換模型將地下空洞的三維點云數據轉換至CGCS2000 國家大地坐標系,以便于融合測繪、地質等數據信息。
實驗結果表明,系統精度高、穩定可靠、廉價實用、結構簡易,但由于測試設備不完善且受實際場地限制,只進行了可行性實驗,后續將優化系統軟、硬件設備,在真實場景中充分發揮掃描端與探測端的優勢。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32