嵌入式感應(yīng)加熱電源測控系統(tǒng)研究
2023-01-08 16:49:14吳夢香蘇淑靖郭楊盛梁東飛梁文科
電子設(shè)計(jì)工程 2023年1期
吳夢香,蘇淑靖,郭楊盛,梁東飛,梁文科
(中北大學(xué)省部共建動態(tài)測試技術(shù)國家重點(diǎn)實(shí)驗(yàn)室,山西太原 030051)
電磁感應(yīng)加熱相較于傳統(tǒng)的電阻絲和石英加熱而言,加熱更加迅速,加熱效率更高,節(jié)能環(huán)保效果更好[1-3],在機(jī)械制造、冶金、食品加工和家電等領(lǐng)域廣為應(yīng)用[4-7]。感應(yīng)加熱電源基于法拉第電磁感應(yīng)現(xiàn)象,利用電能通過感應(yīng)線圈產(chǎn)生按一定頻率交變的電磁場,在受熱工件表面產(chǎn)生渦流損耗從而加熱工件[8]。
隨著感應(yīng)加熱技術(shù)的發(fā)展,對控制精度與數(shù)字化程度的要求也在不斷提高[9],目前通常采用控制電源功率的方法來控制加熱溫度[10-11],但受溫度影響,諧振頻率會產(chǎn)生漂移。為了使感應(yīng)加熱電源處于諧振狀態(tài),必須對頻率進(jìn)行實(shí)時(shí)跟蹤[12]。傳統(tǒng)的頻率跟蹤方法主要為匹配電感調(diào)節(jié)、傅里葉算法測頻、鎖相環(huán)頻率跟蹤等[13-15]。鎖相環(huán)工作帶寬較窄,傅里葉算法計(jì)算量大,匹配電感調(diào)節(jié)控制精度低,可靠性不高[16]。因此,文中對嵌入式感應(yīng)加熱電源測控系統(tǒng)進(jìn)行研究,提出了一種基于卡爾曼濾波的過零檢測算法與模糊自適應(yīng)PID 相結(jié)合的頻率跟蹤控制算法,對電源諧振頻率進(jìn)行檢查和跟蹤,并通過上位機(jī)進(jìn)行實(shí)時(shí)監(jiān)控,顯示電源的工作狀態(tài)。相比于傳統(tǒng)的頻率跟蹤算法,該算法實(shí)時(shí)性高、運(yùn)算量小、響應(yīng)速度快。
1 總體結(jié)構(gòu)設(shè)計(jì)
感應(yīng)加熱電源主要由主電路模塊和控制軟件模塊組成,其總體結(jié)構(gòu)如圖1 所示。用戶根據(jù)所需加熱溫度在上位機(jī)軟件界面設(shè)定電源應(yīng)輸出的功率,上位機(jī)將該功率下發(fā)給單片機(jī),單片機(jī)輸出對應(yīng)PWM 信號來調(diào)節(jié)Buck 斬波電路輸出電壓。220 V市電經(jīng)主電路模塊進(jìn)行AC/DC、DC/AC 轉(zhuǎn)換,產(chǎn)生功率、頻率可調(diào)的交流電對負(fù)載進(jìn)行加熱。逆變電路處于諧振狀態(tài)時(shí),為純電阻電路,此時(shí)只需調(diào)節(jié)Buck 電路輸出電壓的大小就能控制電源輸出功率。但由于溫度影響,電感值發(fā)生非線性變化,電路為非純電阻電路,諧振頻率產(chǎn)生漂移,輸出功率也因此改變。為了使輸出功率保持恒定,逆變電路需要處于諧振狀態(tài)。單片機(jī)通過電壓、電流互感器對施加在負(fù)載上的電壓、電流進(jìn)行采樣,采樣序列由基于卡爾曼濾波的過零檢測算法運(yùn)算得到逆變電路的輸出電壓、電流的頻率以及其相位關(guān)系,將電壓電流相位關(guān)系作為模糊PID 控制器的輸入來控制逆變電路,達(dá)到諧振頻率的自動跟蹤調(diào)節(jié)。

圖1 感應(yīng)加熱電源總體結(jié)構(gòu)
2 主電路結(jié)構(gòu)及工作原理
感應(yīng)加熱電源的主電路結(jié)構(gòu)主要包括整流濾波電路、Buck 斬波電路與逆變電路,如圖2 所示。在工作過程中,感應(yīng)加熱電源將220 V 交流電整流后輸出脈動直流電,再經(jīng)大電容濾波得到較穩(wěn)定直流電,Buck 斬波電路將濾波輸出的直流電進(jìn)行變換,輸出電壓大小可調(diào)節(jié)的直流電,進(jìn)而調(diào)節(jié)電源的輸出功率。由于傳統(tǒng)的Buck電路采用的二極管正向壓降較大,為了提高變換器效率,利用場效應(yīng)管復(fù)制基本二極管的特性,使電路功耗更低,同時(shí)使輸出電壓更為穩(wěn)定;逆變電路將Buck斬波電路輸出的直流電逆變成頻率可調(diào)的交流電,從而對諧振頻率進(jìn)行檢測和跟蹤。

圖2 感應(yīng)加熱電源主電路
3 控制軟件設(shè)計(jì)
3.1 控制軟件總體設(shè)計(jì)
感應(yīng)加熱電源控制軟件由上位機(jī)與單片機(jī)組成,上位機(jī)負(fù)責(zé)下發(fā)指令與監(jiān)控電源狀態(tài),單片機(jī)負(fù)責(zé)調(diào)節(jié)功率、采集電壓、電流與跟蹤頻率,整體運(yùn)行流程如圖3 所示。

圖3 軟件運(yùn)行流程
單片機(jī)系統(tǒng)初始化后首先通過ADC 對負(fù)載兩端電壓、電流進(jìn)行數(shù)據(jù)采集和處理,檢測當(dāng)前電源電壓狀態(tài)以及電流狀態(tài),實(shí)時(shí)反饋其狀態(tài)給上位機(jī)。當(dāng)所有狀態(tài)顯示正常時(shí),用戶根據(jù)所需溫度,在上位機(jī)軟件界面設(shè)定對應(yīng)輸出功率,并下發(fā)給單片機(jī),單片機(jī)獲取參數(shù)后,將其轉(zhuǎn)換為對應(yīng)的PWM波形輸出。上位機(jī)每間隔300 ms 通過串口向單片機(jī)發(fā)出問詢請求,以獲得電源實(shí)時(shí)功率、頻率,單片機(jī)通過采樣并計(jì)算,賦予其固定的幀格式,向上位機(jī)發(fā)送。上位機(jī)接收后反饋顯示至上位機(jī)軟件界面,其中所給定的功率、電源實(shí)時(shí)功率、頻率都存儲在數(shù)據(jù)庫中,用戶可以通過歷史數(shù)據(jù)查看或清除。若電源工作時(shí)產(chǎn)生異常情況(過壓、過流),則通過上位機(jī)報(bào)警顯示,單片機(jī)停止輸出PWM 信號并檢查故障。
3.2 頻率跟蹤控制算法設(shè)計(jì)
電磁感應(yīng)加熱電源在工作時(shí),感應(yīng)線圈的電感值會受外界環(huán)境的影響而發(fā)生改變,使逆變電路的諧振頻率產(chǎn)生漂移。為了保持逆變器工作在諧振頻率恒定狀態(tài),利用卡爾曼濾波過零檢測算法獲得電壓與電流的相位差信號,經(jīng)過模糊自適應(yīng)PID 控制器輸出與相位差相應(yīng)頻率的PWM 波,對逆變器進(jìn)行控制,使其維持在諧振狀態(tài),諧振頻率為:

由式(1)可知,當(dāng)逆變電路頻率與電路中電感電容值滿足一定關(guān)系時(shí),電路處于諧振狀態(tài)。由于電源工作時(shí)電容不變,因此當(dāng)電源輸出電壓超前電流時(shí),回路的負(fù)載特性呈現(xiàn)感性,此時(shí)需減小電壓頻率;當(dāng)電源輸出電壓滯后電流時(shí),回路的負(fù)載特性呈現(xiàn)容性,此時(shí)需增大電壓頻率,單片機(jī)通過生成不同頻率的PWM 波形改變輸出電壓的頻率,從而跟蹤逆變電路的諧振頻率。
3.2.1 基于過零檢測算法的相位差計(jì)算
過零檢測的關(guān)鍵是找到兩次過零點(diǎn)的間隔時(shí)間,逆變電路的電壓為矩形波,電流為正弦波,矩形波可以看成特殊的正弦波。若采樣時(shí)某兩個相鄰采樣點(diǎn)中存在過零點(diǎn),因?yàn)椴蓸又芷谂c過零點(diǎn)采樣值為已知量,且過零點(diǎn)附近正弦波導(dǎo)數(shù)變化很小,因此可以采用線性插值法求得過零點(diǎn)與相鄰采樣點(diǎn)之間的時(shí)間間隔T1與T3,如圖4 所示。
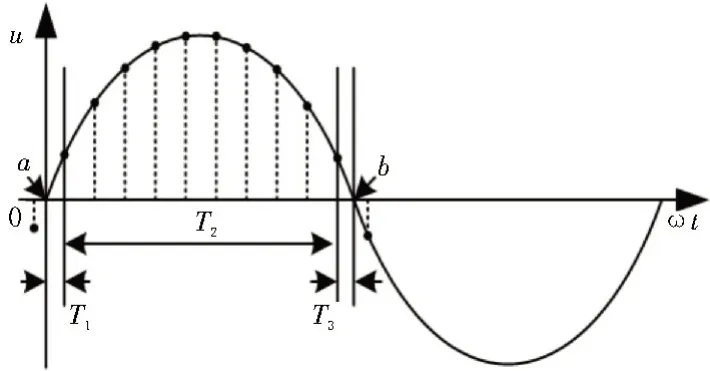
圖4 過零檢測原理圖
設(shè)u(N)為第N點(diǎn)采樣值,u(t)為過零點(diǎn)采樣值,τ為采樣周期,M為兩個相鄰過零點(diǎn)間的采樣個數(shù),過零點(diǎn)a與后一個采樣點(diǎn)之間的時(shí)間間隔T1的表達(dá)式為:

過零點(diǎn)b與前一個采樣點(diǎn)之間的時(shí)間間隔T3的表達(dá)式為:

T2的表達(dá)式為:

由T1、T2與T3相加可求得正半周期,從而得到電壓電流的頻率。由過零點(diǎn)a后一個采樣點(diǎn)的時(shí)間減去T1得到過零點(diǎn)a對應(yīng)的時(shí)間,從而得到電壓電流的時(shí)間差,由該時(shí)間差與頻率就可以得到對應(yīng)的相位差。
3.2.2 基于卡爾曼濾波算法的誤差校正
由過零檢測算法計(jì)算得到的相位差會在真實(shí)值附近上下波動,為了進(jìn)一步減小誤差,采用卡爾曼濾波對所得到的結(jié)果進(jìn)行預(yù)測估計(jì),以減小波動。基于相位差這一個單狀態(tài),對卡爾曼濾波基本公式進(jìn)行化簡,得到如下公式。
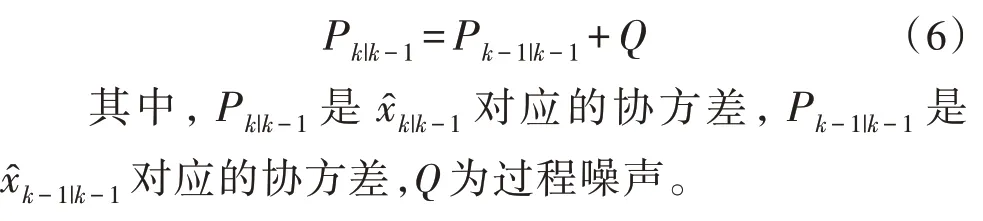
①先驗(yàn)估計(jì)公式如下:
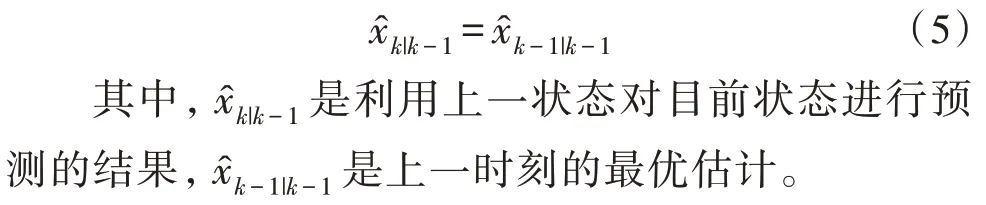
②先驗(yàn)估計(jì)協(xié)方差公式如下:
③卡爾曼增益公式如下:

其中,Kk為卡爾曼增益,R為噪聲平均值。
④最優(yōu)估計(jì)公式如下:

其中,zk為過零檢測得到的相位差。
⑤最優(yōu)估計(jì)協(xié)方差公式如下:

其中,Pk|k為最優(yōu)估計(jì)得到的協(xié)方差。
卡爾曼濾波主要分為兩個步驟:第一步預(yù)測目前狀態(tài)的估計(jì)值及其協(xié)方差;第二步基于預(yù)測值更新參數(shù),之后根據(jù)觀測值來修正,用修正后的狀態(tài)值去估計(jì)下一次數(shù)據(jù)。
3.2.3 基于模糊PID算法的頻率控制
由于感應(yīng)加熱電感受外界環(huán)境的影響使諧振頻率偏移量產(chǎn)生非線性變化,因此采用模糊自適應(yīng)PID 控制算法對感應(yīng)加熱電源進(jìn)行頻率控制,控制原理結(jié)構(gòu)圖如圖5 所示,其中e為單片機(jī)獲得的逆變電路電壓電流相位差。

圖5 模糊PID控制原理結(jié)構(gòu)圖
離散PID 控制表達(dá)式如下:

其中,uk為離散PID 控制輸出,Kp為比例系數(shù),Ki為積分系數(shù),Kd為微分系數(shù),ek為當(dāng)前時(shí)刻偏移量,ek-1為前一時(shí)刻偏移量,由離散PID 控制表達(dá)式得到模糊自適應(yīng)PID控制輸出偏移量表達(dá)式為:
對于采集的e和ec,可以推出其各自所占的隸屬度,之后利用重心法解模糊,如下式:

式中,K為精確量,zi為隸屬度,μc(zi)為相應(yīng)的隸屬值。分別對Kp、Ki和Kd進(jìn)行求解,再結(jié)合式(11)得到PID 控制器的輸出諧振頻率偏移量,經(jīng)處理后得到相應(yīng)的PWM 控制信號,從而對諧振頻率進(jìn)行自動跟蹤。
4 仿真結(jié)果與分析
通過Simulink 對3 kW/30 kHz 的感應(yīng)加熱測控系統(tǒng)進(jìn)行仿真,驗(yàn)證該測控系統(tǒng)的可行性。為了測試基于卡爾曼濾波的過零檢測算法的精度,設(shè)置電壓電流相位差為30°,采樣率為2 MSPS,Q=0.5,R=3。運(yùn)算過零檢測算法后得到的相位差為(30±0.001 5)°,如圖6 所示,因此不影響該測控系統(tǒng)精度。

圖6 過零檢測仿真圖
系統(tǒng)在無擾動狀態(tài)下工作時(shí),采集逆變電路的輸出電壓電流相位差波形,如圖7 所示,電壓、電流趨于同頻同相,電路處于諧振狀態(tài)。

圖7 電感值不變時(shí)的電壓電流相位差波形
在逆變電路工作1 ms 時(shí)施加一個6 μH 的額外電感,輸出電壓電流相位差波形如圖8 所示。在1 ms后一段時(shí)間,電壓電流相位差較大,但隨著頻率的自動跟蹤,在250 μs 后電壓、電流趨于同頻同相,電路處于諧振狀態(tài)。

圖8 電感值改變時(shí)的電壓電流相位差波形
5 結(jié)論
文中研究的嵌入式感應(yīng)加熱電源測控系統(tǒng),采用基于卡爾曼濾波的過零檢測算法與模糊自適應(yīng)PID 控制算法相結(jié)合的方法實(shí)現(xiàn)對電源諧振頻率檢查和跟蹤,通過對采集到的信號進(jìn)行處理并打包,利用串口通信上傳至上位機(jī)軟件,實(shí)現(xiàn)該電源的監(jiān)控功能。通過仿真結(jié)果可知,該測控系統(tǒng)能夠快速地使電路工作在諧振狀態(tài),響應(yīng)速度快,使得功率控制不受環(huán)境溫度的影響,提高了加熱效率。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
測控技術(shù)(2018年12期)2018-11-25 09:37:34
電子制作(2018年12期)2018-08-01 00:48:04
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
電子制作(2017年19期)2017-02-02 07:08:27
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36