一種新的人眼視覺運動認知特性實驗分析方法
2023-01-09 14:29:14李婷婷謝振平
計算機工程 2022年11期
李婷婷,謝振平
(1.江南大學 人工智能與計算機學院,江蘇 無錫 214122;2.江蘇省媒體設計與軟件技術重點實驗室,江蘇無錫 214122)
0 概述
隨著深度學習等新型機器學習技術的出現,人工智能受到廣泛關注,計算機視覺作為其中的熱點研究方向,已經在算法、實際應用等方面取得了豐富的成果[1-2]。然而,目前人工智能算法的適應能力和人類認知仍然存在較大的差距,亟需更為深入地研究人類視覺認知系統對感知信號的處理模式,發展形成更深刻的視覺認知計算理論。
無人駕駛作為最受期待的實際應用場景之一,在感知周圍環境的基礎上,完成對車輛駕駛的行為決策[3]。在眾多科技公司中,以特斯拉為代表的智能駕駛汽車公司已將具有智能決策功能的車輛進行量產化。然而,當面對外界障礙物干擾時,基于視覺傳感器的智能駕駛系統無法正常地進行感知和決策,最終導致自動駕駛汽車傷亡事故[4],這與人類在復雜場景中感知外界信息并做出正確決策的能力存在很大的差距[5]。本文從人類視覺和無人駕駛技術的應用出發,以拓撲性質和空間拓撲關系為主要實驗視角,探討人眼視覺的認知過程。
拓撲性質知覺理論回答了認知神經科學領域“視覺處理從哪里開始”的基本問題,即視覺系統優先發生大范圍的拓撲性質感知[6]。其中,“優先”有兩個嚴格的含義:第一,由拓撲性質決定的整體組織是知覺局部幾何性質的基礎;第二,拓撲性質感知發生的時間早于局部幾何性質的感知[6]。在任意拓撲變換下保持不變的性質稱為拓撲性質。拓撲性質涉及連通性、孔的數量和內外部關系等[6-7],本文主要研究人眼視覺對于包含“孔”的對象物體的拓撲性質。
針對三維空間情形,需要進一步考慮空間中物體運動所伴隨的空間拓撲關系變化[8]。EGENHOFER 等提出了一種用邊界交集的成分來描述對象間或區域間拓撲關系的方法。邊界交集成分指的是兩個區域邊界相交的部分,這些相交的部分包含不同的維數、有界性等,可以詳細表示兩個自身屬性復雜的對象間的空間拓撲關系[8]。拓撲關系作為空間中的基本關系,是空間推理研究的基本問題之一,因此,研究對象間的空間拓撲關系在人眼視覺認知過程中起到重要作用。
本文提出一種針對人眼視覺運動認知特性的實驗分析方法。實驗系統基于Unity3D 引擎平臺,結合Logitech G29 駕駛設備、HTC VIVE 虛擬現實頭戴顯示器等相關設備的構建,通過響應面分析方法設計實驗研究不同拓撲復雜度和空間拓撲關系,結合虛擬現實實驗系統中的具體實現場景,依據無感反饋中的實時眼動跟蹤數據——眼動軌跡,研究在不同維度的場景中人眼視覺對于物體不同運動變化情形的認知響應特性。軌跡圖作為眼動追蹤數據可視化的一種標準輸出形式,可以準確表征受試者的交互意圖和視覺認知過程,表達出“所見即所得”的客觀實驗結果,從而提高視覺認知研究的準確性[9]。
1 視知覺研究背景
1.1 視覺注意選擇機制
視覺系統作為一個選擇性的信息加工系統,在任何認知過程中視覺注意優先選擇有限的外界信息進行加工。在早期視覺注意力選擇機制的作用下,人們可以快速地從復雜環境中找到認知的對象,并將該對象信息傳遞至大腦皮層處進行處理和分析[10]。影響視覺注意選擇的因素大致分為兩種:一種是在指定的認知任務或主觀意圖下,只有與任務相關的刺激對象才會被注意;另外一種是視覺場景中的凸顯刺激,即具有顯著特征的刺激才能無意識地吸引視覺注意,這也稱為“注意捕獲”。在這兩種視覺因素的影響下,注意選擇機制包含兩種方式的視覺信息加工過程:自下而上和自上而下的加工機制[10]。自下而上的注意選擇機制是以顯著刺激為驅動,其認知對象是基于人眼所觀察到的刺激信息[11]。相關刺激信息的加工過程涵蓋三方面遞進階段,即獲取刺激對象的相關信息、合成完整的圖案以及最后的模式匹配。在遞進過程中,注意力不斷增加,有用信息在持續的加工和篩選下,傳遞至大腦皮層進行分析,無用信息即視覺沒有注意到的信息則會流失。然而,通常情況下都是大腦向下傳達指令信息,視覺注意在該目標導向下發生自上而下的信息加工機制,進而人眼不斷搜索相近信息的刺激對象。
近年來,計算機視覺在顯著性對象檢測方面取得了非常大的進步,主要分為兩條研究路線:人眼注視預測和顯著對象檢測。人眼注視預測是通過檢測人眼注視軌跡從而估計個體對當前場景中感興趣的區域。顯著性對象檢測主要是檢測出場景中容易吸引人們注意(顯著特征)的對象并將其從背景中分割出來[13]。本文以人眼注視預測為主要研究路線,通過眼動追蹤技術探索人眼視知覺對于刺激對象不同拓撲復雜度和空間拓撲關系的認知特性。
1.2 拓撲性質知覺理論
對于拓撲復雜度和空間拓撲關系的研究,都涉及到一個重要的概念,即拓撲概念。在任意拓撲變換下保持不變的性質稱為拓撲性質[14],拓撲性質是圖形整體結構中的一類特殊性質,是各種幾何性質中最為穩定的性質。我國著名認知科學家陳霖提出的拓撲性質知覺理論表明,在人類視知覺過程中,物體全局拓撲性質優先被視覺系統感知,其次才會感知到亮度、運動等局部特征。拓撲性質涉及空間連通性、孔的數量和內外關系等[14]。
人類視覺在背景空間中優先注意具有大范圍拓撲性質的物體正是因為孔的拓撲特性。圖形-地面組織的包圍性的Gelstalt 行列式,在數學語言中就是孔的拓撲特性。將完整的圖形對象視為一種模式,接觸邊界的區域被認為是“孔的邊界”,而沒有接觸邊界的區域被認為是“孔”。此外,還可利用拓撲描述符和拓撲孔函數來描述圖形的簡化結構中所包含的拓撲特性[7]。
本文采用的拓撲孔函數表達形式如下:

其中:x是孔的語義表示;i是孔所在位置的層標簽;n是內層標簽,最外層標簽是1;bi是第i層中孔的數量。
以圖1 為例,右下角所示圖形的拓撲孔函數表示為H(x)=x+2x2+x3,通過對拓撲結構的分類和簡化可以得出,H(x)=x、H(x)=x+x2、H(x)=x+x2+x3所表示的圖形都屬于拓撲結構中的嵌套結構,H(x)=2x、H(x)=3x表示的圖形屬于并行結構,H(x)=x+2x2+x3表示的圖形屬于復合結構,也即給定一個圖形的孔函數可以知道其簡化結構,反之亦然。同時將拓撲孔函數派生的拓撲描述符作為一個向量[7]P=[i;bi],其中i={1,2,…,n}和bi是式(1)中使用的相同參數,因此,圖1 右下角所示簡化圖形的拓撲描述表示為P=[1,2,3;1,2,1],其與孔函數具有相同的功能,都是對拓撲特性進行可解釋化。這兩個函數區別在于:孔函數更直接地展示了圖形的拓撲屬性,而拓撲描述符則更利于系統中的計算。
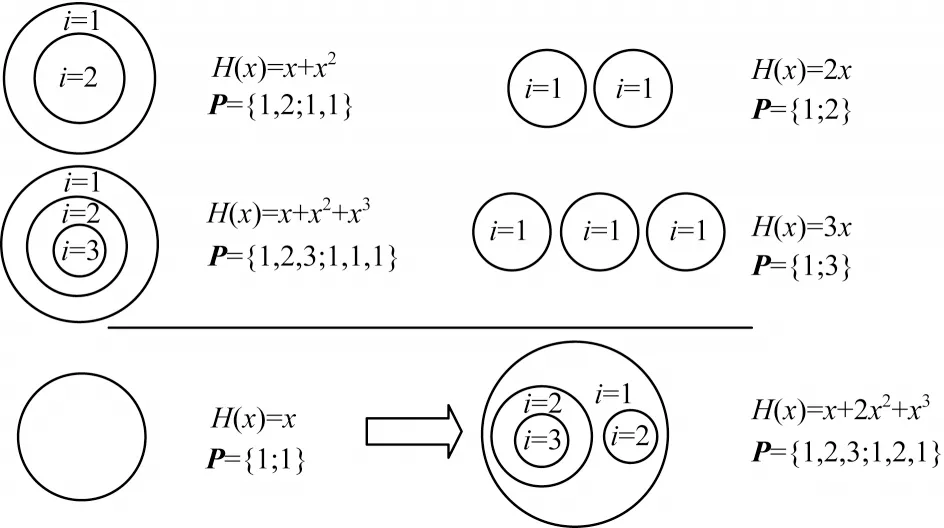
圖1 孔函數和拓撲描述符示意圖Fig.1 Schematic diagram of hole functions and topological descriptors
綜上所述,孔函數和拓撲描述符之間有著密切的關聯,都可以用來描述物體的拓撲特性。其中,總和bi代表物體孔的總數,區域層標簽i代表物體內部/外部關系,圖形的拓撲復雜度與層標簽呈正向相關關系,標簽越大,拓撲復雜度越高[7]。
1.3 空間拓撲關系
人類生活的空間是一個三維立體空間,物體間的空間關系和物體本身的屬性同樣重要,對于拓撲關系的研究在空間關系中占有重要的指導地位。空間拓撲關系是指拓撲變換(平移、旋轉、縮放等)下的拓撲不變量,是空間關系的一種[15]。空間拓撲關系表示方法包含定性表示、定量表示、定性與定量結合表示三類,其中定性表示是在更高層次上抽象空間對象及關系描述[15],由于空間存在一些復雜且不確定性的問題,表示和推理空間關系普遍采用定性的方法。拓撲關系作為最基本的空間關系,可以產生定性差異,空間對象拓撲關系的定性研究主要分為兩條路線:確定性區域間拓撲關系的研究和不確定性區域的表示及其分析方法的研究,本文以確定性區域間的空間拓撲關系為主要研究路線。確定性區域指的是空間對象隱含著的邊界確定性。RCC形式化模型是目前相關研究中最具有代表性的模型之一,該模型的目的是對空間對象的拓撲關系進行分類,對數量大、復雜度高的空間對象拓撲關系進行合理化的分類,通過形式化描述模型分析出有限空間拓撲關系[16]。本文主要介紹RCC模型中最具代表性的RCC-8關系集[16],如圖2所示。RCC-8關系集包含不連接(DC)、外部連接(EC)、部分交疊(PO)、正切真部分(TPP)、非正切真部分(NTPP)、相等(EQ)、反正切真部分(TPPI)和反非正切真部分(NTPPI)。本文主要基于TPP 空間拓撲關系和NTPP 空間拓撲關系進行實驗,通過控制圖中物體X的平移方式,即運動狀態,進而實現這兩種空間拓撲關系間的轉變。

圖2 區域間的RCC-8 關系Fig.2 RCC-8 relationships between areas
空間推理是指利用空間理論和人工智能技術對空間對象進行建模、描述和表示,并據此對空間對象間的空間關系進行定性或定量分析和處理的過程[17]。目前,空間推理被廣泛應用于機器人導航、高級視覺、工程設計、智能駕駛的常識性推理等方面,同時也是人工智能領域的一個研究熱點[18]。
2 眼動追蹤視覺注意實驗方法
2.1 實驗目的
依據上文討論,現有的視覺拓撲研究大多集中在二維空間中,對于日常生活中的具體應用還未廣泛地進行研究。相對地,日常駕駛環境下人類對于刺激對象的視覺拓撲認知過程的相關實驗研究鮮有報道。本文擬通過虛擬現實視覺行為實驗,以眼動跟蹤數據作為主要的視覺認知分析數據集,進而探索日常駕駛環境中人眼視覺注意對于刺激對象的運動認知特性。
2.2 實驗框架
本文設計的仿真駕駛認知實驗結合了虛擬現實[19]和人機交互兩大主流技術,并根據駕駛認知系統的不同功能劃分為4 個模塊,即仿真駕駛設計模塊、人機交互設定模塊、被試的認知響應眼動跟蹤數據采集模塊以及結果討論模塊,不同模塊之間通過接口參數和場景界面完成信息的傳遞。
仿真駕駛設計模塊是整個實驗系統的核心,包含本文實驗方法的三條主要路線,即虛擬環境的制作、VR任務的呈現以及仿真駕駛任務的實現,如圖3 中①部分所示。實驗全程在沉浸式虛擬現實環境下進行,虛擬環境使用游戲引擎Unity2019.4.26f1 和C#進行編程[20],運行于Windows 10 Home 電腦,配置為64 位操作系統、Intel Core i9-10850K,3.6 GHz、32 GB RAM 和NVIDIA GeForce RTX 3070 顯卡。VR 任務使用HTCVive 來呈現,這是一種6 自由度VR 系統,由一個頭戴顯示器和兩個手持控制器組成。虛擬環境中的眼動跟蹤數據是使用HTC Vive Pro Eye 中內置的眼動儀Tobii進行采集的。Tobii 的精度估計為0.5°~1.1°,采樣頻率為120 Hz。仿真駕駛任務使用羅技G29 來實現,駕駛員的操作由羅技G29 設備采集并送入Unity 場景下模擬車輛的動態系統。實驗的具體設計如圖3 中②和③部分所示,包含相關事物模型的搭建,涉及城市街道中的建筑物、街道、指示牌和樹木等,以及駕駛車輛的內部結構和外形設計等。
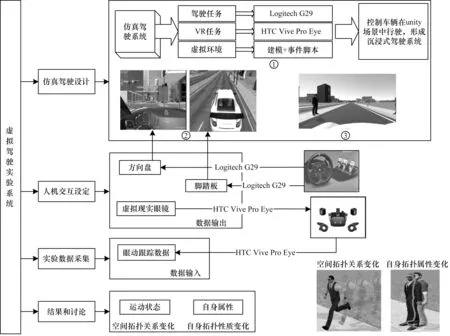
圖3 視覺注意認知虛擬實驗系統Fig.3 Virtual experiment system of visual attention cognition
人機交互設定模塊和實驗數據采集模塊是對上述駕駛實驗設計框架的細節性解釋,描述的是實驗內容的具體實現方式:將Logitech G29 中的方向盤和腳踏板外界駕駛設備作為虛擬場景中汽車的響應輸入設備,當真實環境中的駕駛者操作相關駕駛設備時,Unity3D 場景下的虛擬車輛運行相同的行駛狀態。整個駕駛實驗過程是基于HTC Vive Pro Eye 虛擬現實頭戴顯示器進行的,以虛擬現實眼鏡作為主視角的視覺輸出設備,從而實現沉浸式的汽車駕駛[21]。
實驗數據的采集利用眼動追蹤技術,即通過記錄眼動軌跡并從中提取諸如注視點個數、注視時間、眼跳距離及瞳孔大小等數據,從而研究個體的內在認知過程[22]。本文利用HTC Vive Pro Eye 中與Vobling AB 共同研發的眼動追蹤數據分析工具Tobii眼動儀[21],在虛擬環境中提取到被試實驗過程中的實時眼動追蹤數據,并且將該數據進行可視化處理[23-24],利于本文后續過程中的實驗結果分析。最后的結果和討論模塊,主要在空間拓撲關系(運動狀態變化)和拓撲性質(自身屬性變化)這兩種變化下對人類視覺注意認知過程存在的認知特性進行相關討論。
2.3 實驗內容
實驗主要測試在二維圖形認知環境和三維駕駛行為認知環境下,對象自身拓撲性質、對象間的空間拓撲關系與人眼視覺注意的相關認知關系,其中包含自變量因子A和B。自變量因子A表示場景中認知對象所發生的不同程度的拓撲變換,自變量因子B表示場景中認知對象所出現的不同運動狀態變化。
2.3.1 空間圖形認知
基于上文中拓撲復雜度和空間拓撲關系的相關描述內容,設計如圖4 所示的實驗思路。
圖4(a)顯示了主要的自變量因子A,在原始圖形的基礎上發生以下三種水平的拓撲復雜度變化:拓撲復雜度變化1(P={1,2;1,1})即嵌套結構圖形,拓撲復雜度變化2(P={1;2})即并行結構圖形,拓撲復雜度變化3(P={1,2;2,1})即復合結構圖形。
圖4(b)顯示了空間拓撲關系的設計思路,左上角圖形標識了TPP 和NTPP 兩種空間拓撲關系,這兩種空間拓撲關系之間的轉化通過對象X的移動實現。其中,speed 是本文定義的速度,即期望物體每秒移動的距離。根據實驗中正方形長寬設定值為1 m,即圖中正方形Y的長寬為1 m,對象X在1 s 時間內分別移動1 m、3 m、6 m,設置這三種不同的移動速度作為自變量因子B。①中對象X是以基礎移動速度1(Speed=1 m/s)進行空間拓撲關系轉換,②中對象X以基礎速度的3 倍進行移動,即以速度2(Speed=3 m/s)發生空間拓撲關系的轉換,③中X是以基礎速度的6 倍進行移動,即以移動速度3(Speed=6 m/s)進行轉換。本實驗主要通過控制對象X的運動狀態進而改變空間拓撲關系,圖中用虛線標示出不同速度下的運動狀態,速度越大虛線密度越大。
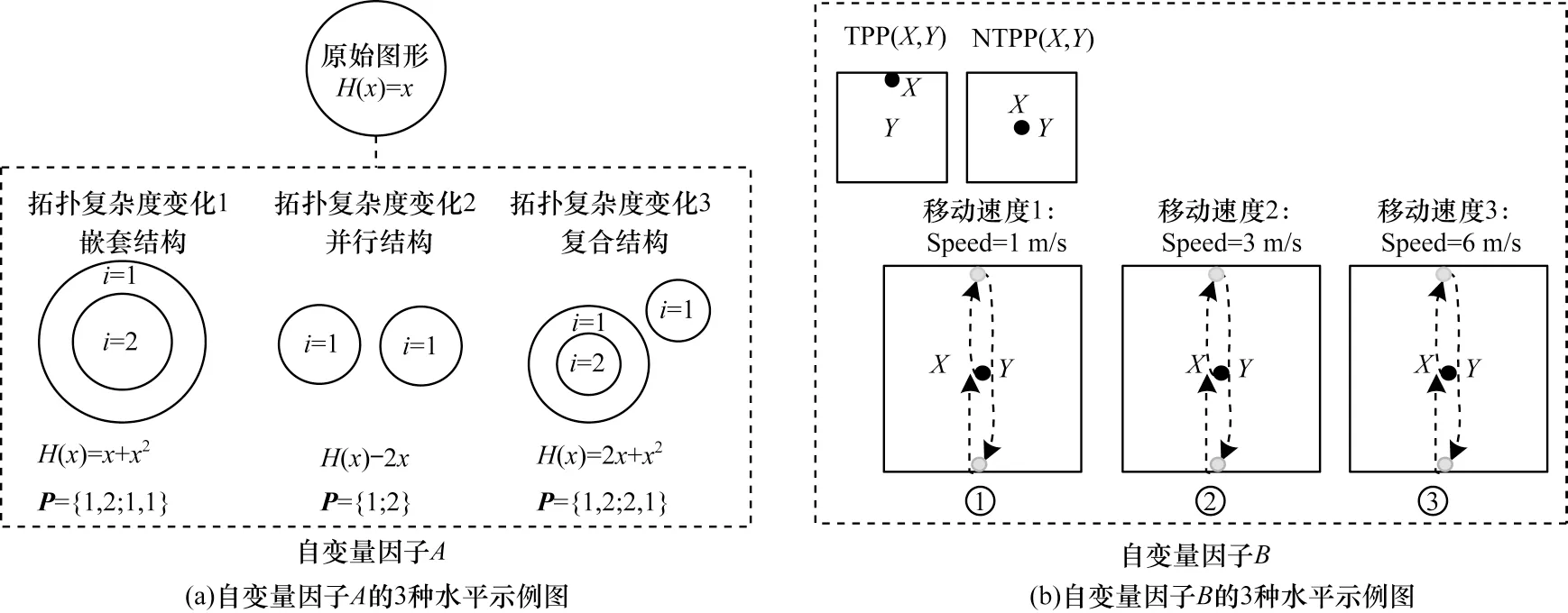
圖4 自變量因子A 和自變量因子B 的3 種水平示例圖Fig.4 Diagram of an example of three levels of independent variable factor A and independent variable factor B
據以上實驗思路,本文基于Unity3D 引擎平臺設計在二維空間中人眼視覺對于動態拓撲變化和運動狀態變化的認知實驗。在正式實驗之前,需要對被試進行預實驗流程,主要是讓被試了解整個實驗過程。正式實驗程序如圖5 所示,實驗中呈現的圖形分為標準圖形(只有1種:正方形)和13個刺激圖形(標準圖形有2類:拓撲變化圖形和運動狀態變化圖形)。首先向被試呈現標準圖形,緊接著呈現一對刺激圖形,包含拓撲性質變化和運動狀態變化兩種刺激,當前流程圖中顯示的是拓撲復雜度變化1和移動速度3兩種刺激,需要再次恢復成標準圖形利于放松眼部運動。整個過程共呈現13項注意認知項目,每個項包含一對刺激圖形,如圖5右上角所示,其中包含拓撲變化和運動狀態變化,兩種變化發生的位置左右隨機出現,最后呈現結束畫面。標準圖形在頭戴顯示器中的顯示時間是5 s,單個刺激圖形的顯示時間是1 s,整個二維圖形認知實驗用時約2 min。
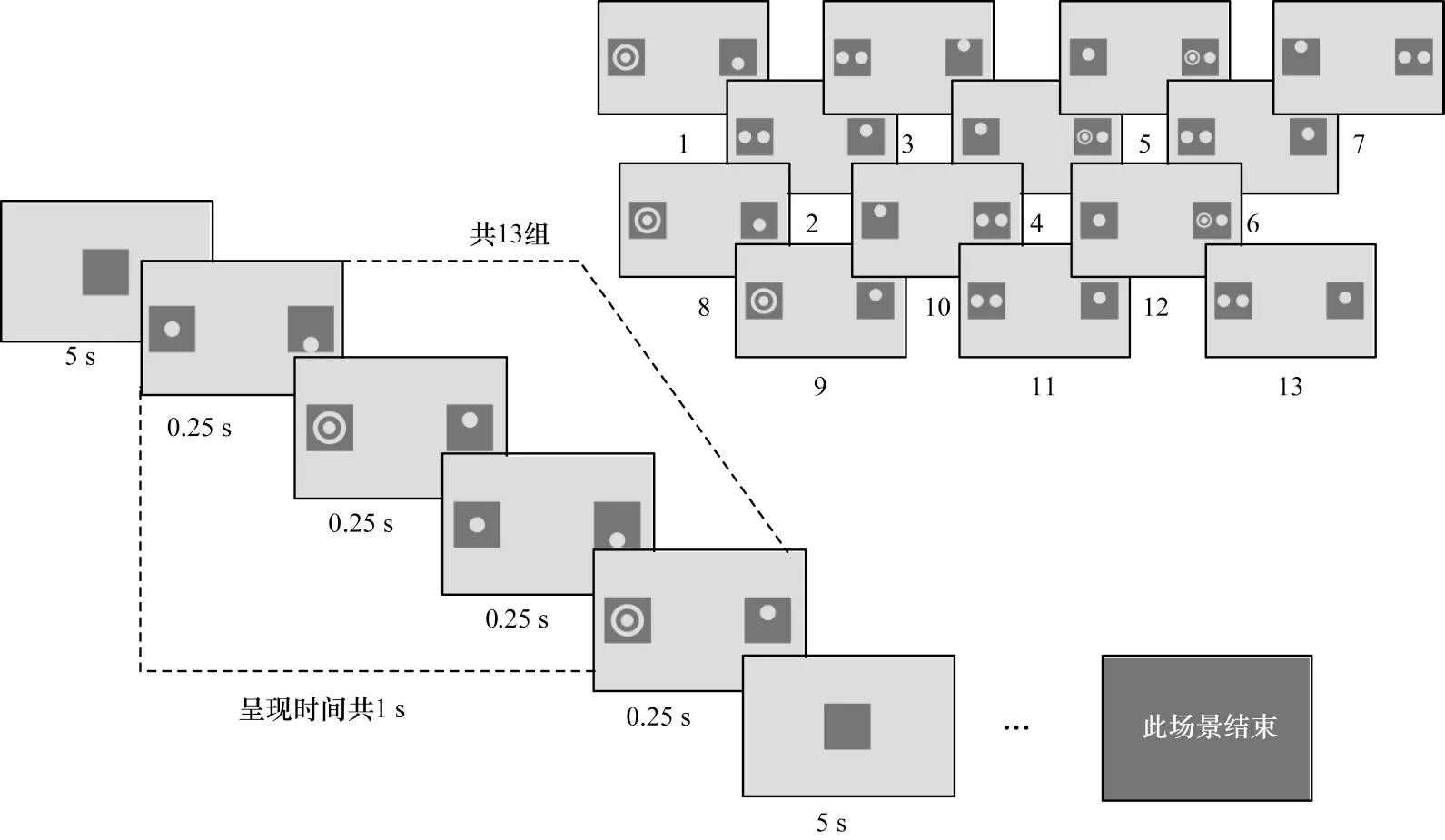
圖5 二維圖形認知實驗過程Fig.5 Two-dimensional graphic cognitive experiment process
2.3.2 三維空間駕駛行為認知
為了將2.3.1 節中描述的二維空間中簡單圖形的認知實驗思路應用于三維空間,基于人類的日常駕駛活動,本文設計三維空間中的仿真駕駛行為認知實驗。將陳霖的拓撲性質知覺理論和空間拓撲關系應用于三維空間中的日常駕駛活動,實驗思路如圖6 所示,其中,①展示的是空間拓撲關系的轉換過程,通過對象X的跳躍移動方式將空間拓撲關系從DC(不連接)轉換為EC(外部連接)。這種空間范圍下的拓撲變換應用于實際三維場景中,表現為人類的運動狀態變化,即通過人類對象X奔跑時與地面Y之間的接觸點,完成兩種空間拓撲關系的轉換,將這種空間拓撲關系的運動變化作為實驗中的自變量因子B。為了方便讀者理解,為場景中運動的對象添加了拖影代碼,用于標識運動的狀態及軌跡。另一方面,對象自身屬性所發生的拓撲性質變化過程如圖6 中②所示,從拓撲性質的連通性方面看,不同人體內部連通性不同,從而有著不同的拓撲性質,每個人體都包含屬于自身屬性的層標簽和拓撲洞函數,雖然層標簽數n、m是不確定的數值,但可以確定的是不同人體包含的層標簽和拓撲洞函數是不相同的,因此,當一個人變成另外一個人時,即發生了拓撲性質變化,將這種拓撲性質的變化作為實驗中的自變量因子。
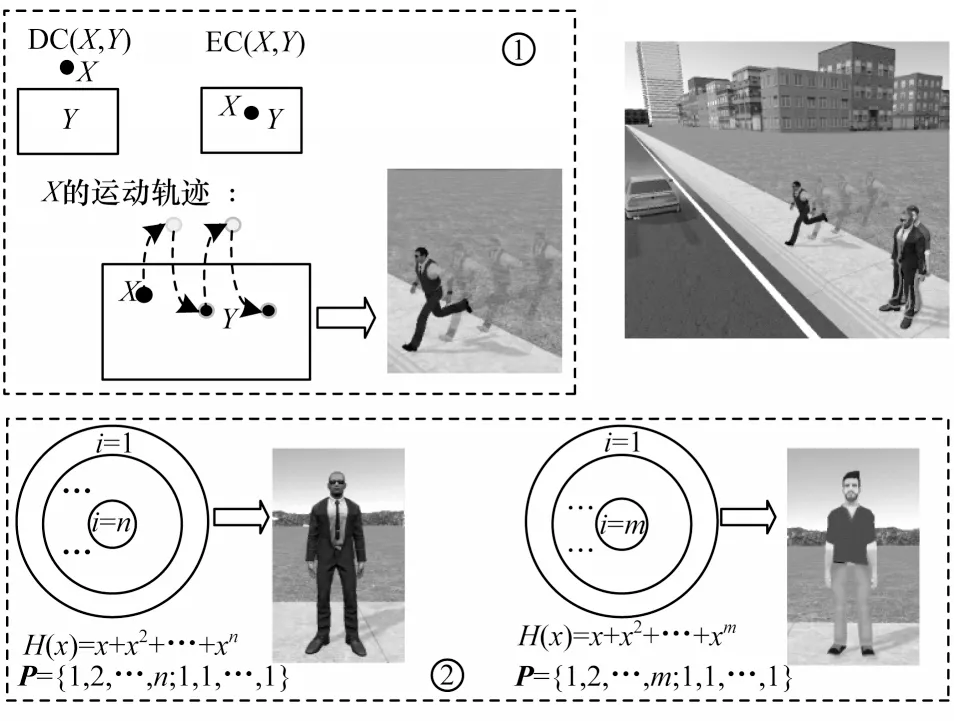
圖6 三維空間駕駛行為認知場景Fig.6 Cognitive scene of driving behavior in three-dimensional space
在三維空間駕駛行為認知實驗中,基于Unity3D引擎進行實驗場景的搭建及自變量因子的設置,如圖6 右上角圖片所示。被試被放置在一個模擬城市街道的小轎車中,街道中包含建筑物、車輛和行人等,其中路邊的行人狀態包含正常靜態站立狀態、發生自身拓撲屬性變化的狀態(刺激)以及發生運動狀態變化的狀態(刺激)。被試需要在執行正常駕駛任務的前提下注意路邊出現的刺激對象,并且用視覺注視來進行定位。在12 項注意認知項目中,8 項同時出現兩種刺激對象(自身拓撲屬性改變的刺激對象和運動狀態改變的刺激對象),2 項僅出現運動狀態改變的刺激對象,2 項僅出現拓撲屬性改變的刺激對象。
虛擬場景中的駕駛任務是由被試借助外部Logitech 駕駛模擬器組件完成的,將羅技駕駛模擬器中的G29 方向盤、汽車踏板作為虛擬駕駛的數據輸入設備,通過采集G29 力反饋方向盤及踏板的啟動、轉向、加速踏板和制動踏板,將實時獲得的駕駛速度和方向盤轉角等駕駛數據信息傳輸至Unity3D 平臺下控制車輛行駛的相關代碼中,從而控制場景中虛擬車輛的相應行駛狀態。為了提供更好的駕駛體驗效果,本文將車輛的行駛速度控制在50 km/h 以下,整個三維駕駛認知實驗用時約為2 min。
上文設計的兩個認知實驗均要求被試在全程配戴虛擬現實眼鏡的條件下進行,實驗開始后播放相應的視覺認知實驗場景。同時,利用HTC Vive Pro Eye中集成的眼動追蹤工具,實現全程同步記錄受試者發生視覺認知時的眼部軌跡數據,通過分析被試的眼動跟蹤數據,探討人眼視覺注意的認知優先特性。
3 實驗結果與分析
實驗中使用HTC Vive Pro Eye 虛擬現實頭戴顯示器中的眼動集成工具,被試在佩戴虛擬現實眼鏡進行實驗的同時,眼鏡內置的眼動監測設備可以捕捉雙眼實時的運動軌跡。實驗通過改寫眼動監測的相關代碼,將實時監測到的眼動軌跡數據存儲至工程文本文件中,從而有利于本文對實驗數據的對比分析以及眼動軌跡在場景中的再現。實驗主要通過眼動軌跡了解視覺認知的總體情況,本文在測試的總樣本中選取20 個眼動跟蹤標準樣本數作為實驗結果分析的依據。在每個被試進行實驗之前,均要求重新校準眼動追蹤,即被試眼睛按照屏幕中顯示的校準點進行移動從而執行校準過程。然后運行Unity3D 引擎,通過VR 眼鏡呈現不同的實驗場景,并同時采集被試在場景中的一系列眼動注視點(x,y,z),從而獲得眼動跟蹤的數據。
二維圖形認知實驗和三維駕駛運動認知實驗均采用響應面分析方法對實驗變量進行有效設計和分析,Design-Expert 是一款專業的響應面數據分析軟件,包含實驗設計、實驗分析和實驗優化功能[25],本文主要利用實驗設計功能,通過隨機生成的變量水平,設計場景中相對應的刺激變量。
二維圖形認知實驗設計及結果如表1 所示,Central Composite 實驗設計分為13 個實驗組別,分別包含自變量因子A和自變量因子B,其中,Coded variable level 是Design-Expert 軟件設計的隨機實驗數值,表示每個變量因子有3 種水平(-1、0、1),Real variable level 是變量的不同水平,在實驗場景中所對應的實際狀態,自變量因子A的3 種水平,分別對應拓撲復雜度變化1、拓撲復雜度變化2 和拓撲復雜度變化3,自變量因子B的3 種水平分別對應3 種運動速度(移動速度1、移動速度2、移動速度3)。最后在選定的20 個被試樣本中,分別統計同時出現這兩個變量時,被試的眼動跟蹤軌跡優先發生在拓撲性質變化的次數和發生在運動狀態變化的次數。
從表1 中可以看出,在13 組隨機實驗中,20 個被試優先識別拓撲變化的次數分別是2、6、9、6、4、3、4、2、6、1、7、5、3,優先識別運動狀態變化的次數分別是18、14、11、14、16、17、16、18、14、18、12、15、16。運動狀態的眼動次數明顯多于拓撲變化的眼動次數,顯然,當呈現不同拓撲復雜度的拓撲性質變化和不同速度的運動狀態變化時,被試普遍優先發生運動狀態的注意捕獲。
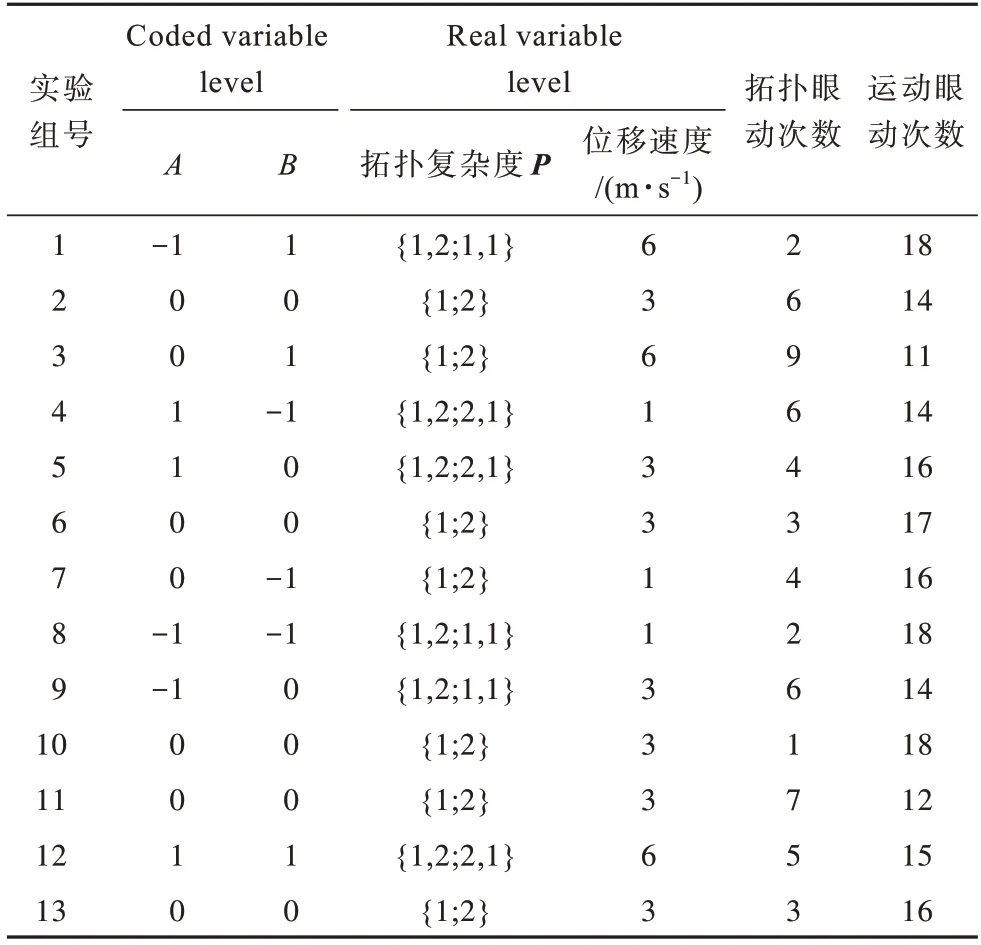
表1 二維圖形認知實驗中變量因子A 和變量因子B 的水平和相應的眼動次數Table 1 Levels of variable factor A and variable factor B and corresponding number of eye movements in two-dimensional figure cognition experiment
同樣,可以將記錄在工程文本文件中的眼動跟蹤數據還原繪制在駕駛實驗場景中,并對場景中出現的13 組刺激圖形下的不同被試眼動軌跡分布進行對比分析。隨機選取單個被試的眼動跟蹤數據,并將其還原繪制在二維圖形認知場景中,二維圖形認知實驗眼動軌跡對比結果如圖7 所示(彩色效果見《計算機工程》官網HTML 版)。其中:白色球體表示被試優先識別的對象;紅色球體表示被試的眼睛注視位置。

圖7 一組二維圖形實驗眼動軌跡對比結果Fig.7 Comparison results of eye movement trajectories of one group of two-dimensional graphics experiment
在當前選取的一組眼動軌跡數據中,剔除干擾數據,有效眼動軌跡數據有13 組,共包含508 個。其中被試優先注意到運動對象的眼動組次有11 組,只有2 組眼動軌跡優先出現在拓撲屬性變化的刺激對象上,并且出現在運動刺激對象上的眼動注視數據有487 個,注視在拓撲屬性刺激對象上的數據有21 個。通過眼動軌跡數據和結果圖的對比可以明顯看出,當發生拓撲屬性變化的刺激圖形和發生運動狀態變化的刺激圖形同時出現在場景中時,被試的眼動注視點優先且主要集中在運動狀態變化的刺激對象上。
三維駕駛環境下的認知響應實驗結果如表2 所示,Central Composite 實驗設計與二維圖形認知實驗基本相同,區別在于:變量因子A的3 種水平(-1、0、1)分別對應實際場景中的無變化、自身屬性變化,變量因子B的3 種水平(-1、0、1)分別對應無變化、運動狀態變化。由于當變量水平是-1 時均無變化發生,因此隱藏了表中第8 組數據(-1,-1)的表示。表2 中①~?分別表示實驗中的20 個被試者,根據采集每個被試者的眼動軌跡數據,眼動注視點優先出現在哪種變量上,即優先注意到哪種變化的發生,在該變量下進行勾選。可以清晰地從表中看出,多數被試都優先發生了運動狀態的認知,并且20 個被試優先識別拓撲變化的次數分別是2、5、3、2、2、1、4,優先識別運動狀態變化的次數分別是12、7、8、13、11、10、12、8。通過對比分析可知,當拓撲性質變化和運動狀態變化同時出現時,運動狀態的變化更容易引起視覺發生注意捕獲。
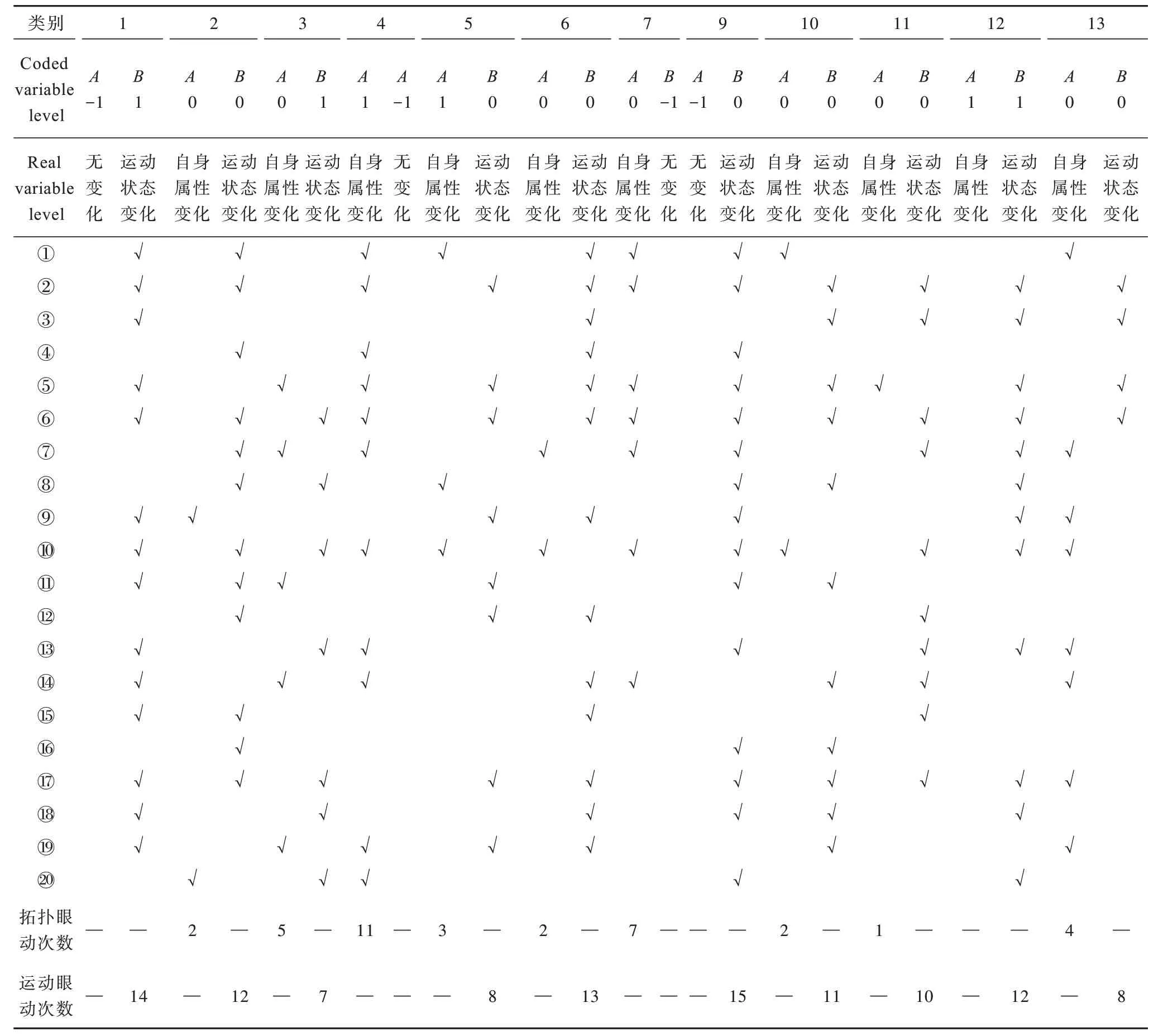
表2 三維駕駛認知實驗中變量因子A 和變量因子B 的水平和相應的眼動次數Table 2 Levels of variable factor A and variable factor B and corresponding number of eye movements in three-dimensional driving cognitive experiment
同樣,隨機選取單個被試的眼動跟蹤數據,并將其還原繪制在駕駛場景中,三維駕駛實驗眼動軌跡對比如圖8 所示(彩色效果見《計算機工程》官網HTML 版)。采集的被試眼動跟蹤數據實際上代表眼球注視點在三維空間中的不同位置坐標(x,y,z),因此,為了具體化被試的注意認知過程,本文在這些三維坐標處分別生成球體進行軌跡實例化,白色球體表示最開始識別的對象,之后的眼動位置均生成紅色球體表示眼動軌跡,圖中數字分別表示認知響應實驗設計中的13 項實驗組數據,除了第8 項以外均在三維駕駛場景中隨機出現,共呈現12 組。
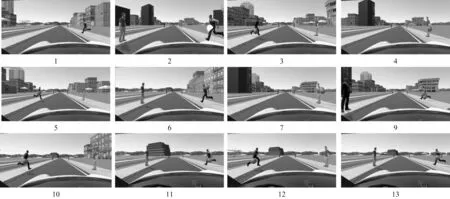
圖8 一組三維駕駛實驗眼動軌跡對比結果Fig.8 Comparison result of eye movement trajectories in one group of three-dimensional driving experiment
在選取的一組眼動軌跡數據中,剔除了干擾數據,有效眼動軌跡數據有12 組,共包含37 個,其中被試優先注意到運動對象的眼動組次有10 組,只有2 組眼動軌跡優先出現在拓撲屬性變化的刺激對象上,并且眼動注視點出現在運動對象上的數據共有29 個,出現在自身拓撲屬性上的數據共有8 個。可以明顯看出,在被試正常駕駛狀態下時,其眼動注視點優先且主要集中在發生運動狀態變化的刺激對象上,并且注視點多處于運動對象的腿部位置。
上述實驗結果表明,通過定性和定量的數據分析,配合恰當的眼動跟蹤軌跡圖,可以真實地還原被試的認知過程。由此也可以分析發現,對于刺激對象運動狀態的注意捕獲優先發生在人眼視覺認知過程的早期階段。
4 結束語
本文對拓撲性質知覺理論和空間拓撲關系進行研究,基于虛擬現實仿真、人機交互、響應面分析、眼動跟蹤等技術設計二維空間圖形認知實驗和三維空間駕駛行為認知實驗分析方法,從而探索自身屬性的拓撲性質變化和運動狀態的空間拓撲關系變化在人眼視覺注意認知過程中的優先性。多角度的眼動跟蹤數據可視化結果表明,在視覺認知過程中,相比運動對象自身拓撲性質的變化,人眼視覺優先識別對象運動狀態相關的大范圍空間拓撲關系的變化,這一結論在人工智能技術推動計算機實時感知和智能決策的同時,豐富了智能技術安全可靠的理論依據內容,為可信人工智能技術下的智能駕駛研究提供了駕駛視覺注意預測計算模式新思路。
猜你喜歡
包裝工程(2023年18期)2023-09-27 09:17:36
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
載人航天(2021年5期)2021-11-20 06:04:32
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
天津體育學院學報(2016年3期)2016-12-18 08:24:32
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
外語學刊(2016年4期)2016-01-23 02:34:15