掘錨一體機機載式探放水鉆機控制系統的設計
2023-01-12 12:54:30谷樹偉宋亞新于明生劉治翔
工程設計學報 2022年6期
谷樹偉,陳 凱,宋亞新,于明生,劉治翔,鄒 康
(1.遼寧工程技術大學電氣與控制工程學院,遼寧葫蘆島 125000;2.國家能源集團包頭能源有限責任公司李家壕煤礦,內蒙古鄂爾多斯 017000;3.遼寧工程技術大學礦產資源開發利用技術及裝備研究院,遼寧阜新 123000)
巷道掘進嚴格執行“有掘必探”的措施,即采取“物探先行、鉆探驗證、化探跟進”的超前探測手段。巷道掘進前須先物探、后鉆探,消除隱患后方可掘進一定距離,待到達允許掘進位置后再物探、鉆探,依次循環。在鉆探過程中,如果發現涌水現象,須及時采集水樣進行化驗,分析水質類型,辨別出水水源,并采取相應的防治措施[1-3]。
李棟[4-5]介紹了基于模塊化設計思路研制的ZDY3500T型分體式和ZDY3500LT型履帶式煤礦用探放水鉆機。梁春苗等[6]針對探放水工藝施工的特殊條件,研制了ZDY1300L型淺孔探放水鉆機及其配套裝置和液壓系統。李旺年[7]研發了與掘錨一體機配套使用的機載錨桿鉆機,并對鉆機的給進裝置、回轉器及液壓系統三個關鍵部分進行了設計。目前,綜掘工作面前探設備普遍采用相對獨立的煤礦用液壓鉆機。鉆探時,由人工將液壓鉆機各組成部件運送至迎頭進行組裝,組裝完成后開始探測工作。鉆探過程全由人工完成,探測完成后液壓鉆機各部件被拆解并搬運至掘進機后方放置[8-10]。整個鉆探工作流程復雜,反復裝拆、搬運部件的時間多,工人的勞動強度較大,所需人工也較多,這嚴重影響了掘進工作效率[11-12]。因此,作者設計了一種掘錨一體機機載式探放水鉆機。為了全方位了解探放水鉆機的工作狀態,提高探放水鉆機的智能化水平,設計了鉆機的遠程控制系統,以期為實現自動化、可靠鉆進提供有力保障。
1 探放水鉆機控制系統總體設計
1.1 探放水鉆機介紹
所設計的探放水鉆機安裝在原通風除塵風機處,如圖1所示。其結構如圖2所示。
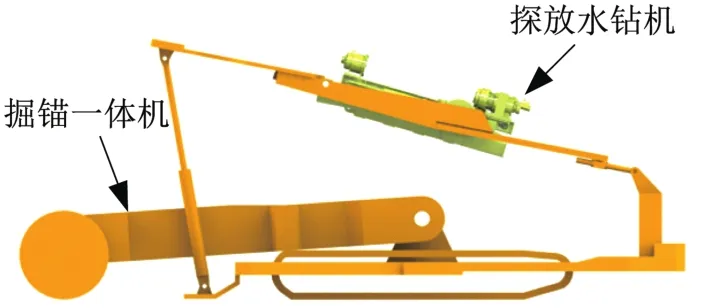
圖1 探放水鉆機安裝位置示意Fig.1 Schematic of installation position of water exploration and drainage drilling rig
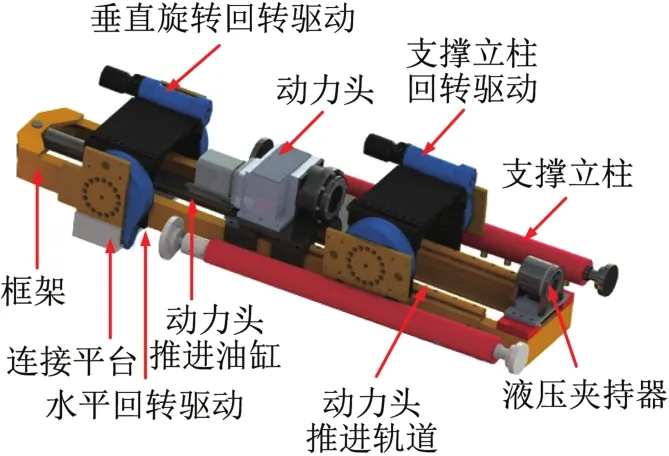
圖2 探放水鉆機結構Fig.2 Structure of water exploration and drainage drilling rig
探放水鉆機主要由連接平臺、框架、動力頭、動力頭推進油缸、動力頭推進軌道、垂直旋轉回轉驅動、水平回轉驅動、支撐立柱、支撐立柱回轉驅動和液壓夾持器等組成。支撐立柱在探放水鉆機不工作時是水平放置的,在探放水鉆機工作時由其回轉驅動帶動至垂直放置,用來支撐鉆機,提高鉆機作業時的穩定性。
1.2 控制系統結構
探放水鉆機自動電控系統的總體架構如圖3所示。其主要包括探放水鉆機狀態自動感知單元、鉆機作業自動控制單元、鉆機作業執行機構單元和人機界面單元等。
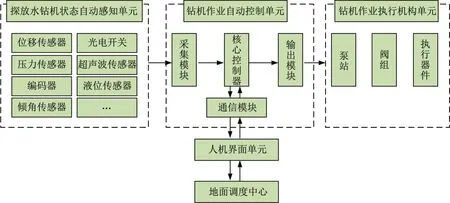
圖3 探放水鉆機自動電控系統總體架構Fig.3 General structure of automatic electric control system for water exploration and drainage drilling rig
探放水鉆機狀態自動感知單元主要包括位移傳感器、壓力傳感器、編碼器、傾角傳感器、光電開關、超聲波傳感器和液位傳感器等;鉆機作業自動控制單元主要包括模擬量采集模塊、核心控制器、輸出模塊和通信模塊等;鉆機作業執行機構單元主要包括液壓泵站系統、控制器閥組、液壓缸和液壓馬達等執行元件。鉆機狀態自動感知單元將檢測到的鉆機運行狀態與設定的參數進行比對,通過鉆機作業自動控制單元的控制器運算后得到鉆機執行機構調整參數,然后控制鉆機作業執行機構單元進行相應的調整,實現鉆機自動作業以及健康狀態實時監控,并將數據通過井下環網上傳到地面調度中心[13-14]。
2 探放水鉆機控制系統硬件設計
探放水鉆機控制系統的主要監測量有一級伸縮油缸位移、二級伸縮油缸位移、鉆機進給油缸位移、垂直旋轉回轉驅動所調節的整機傾角、水平回轉驅動所調節的整機水平轉角、支撐立柱下段油缸壓力、支撐立柱上段油缸壓力、動力頭旋轉載荷、動力頭推進載荷、系統總壓力、掘錨一體機傾角、掘錨一體機水平距離、設備振動加速度和掘錨一體機振動加速度等[15-16]。主要監測傳感器的型號及量程如表1所示。
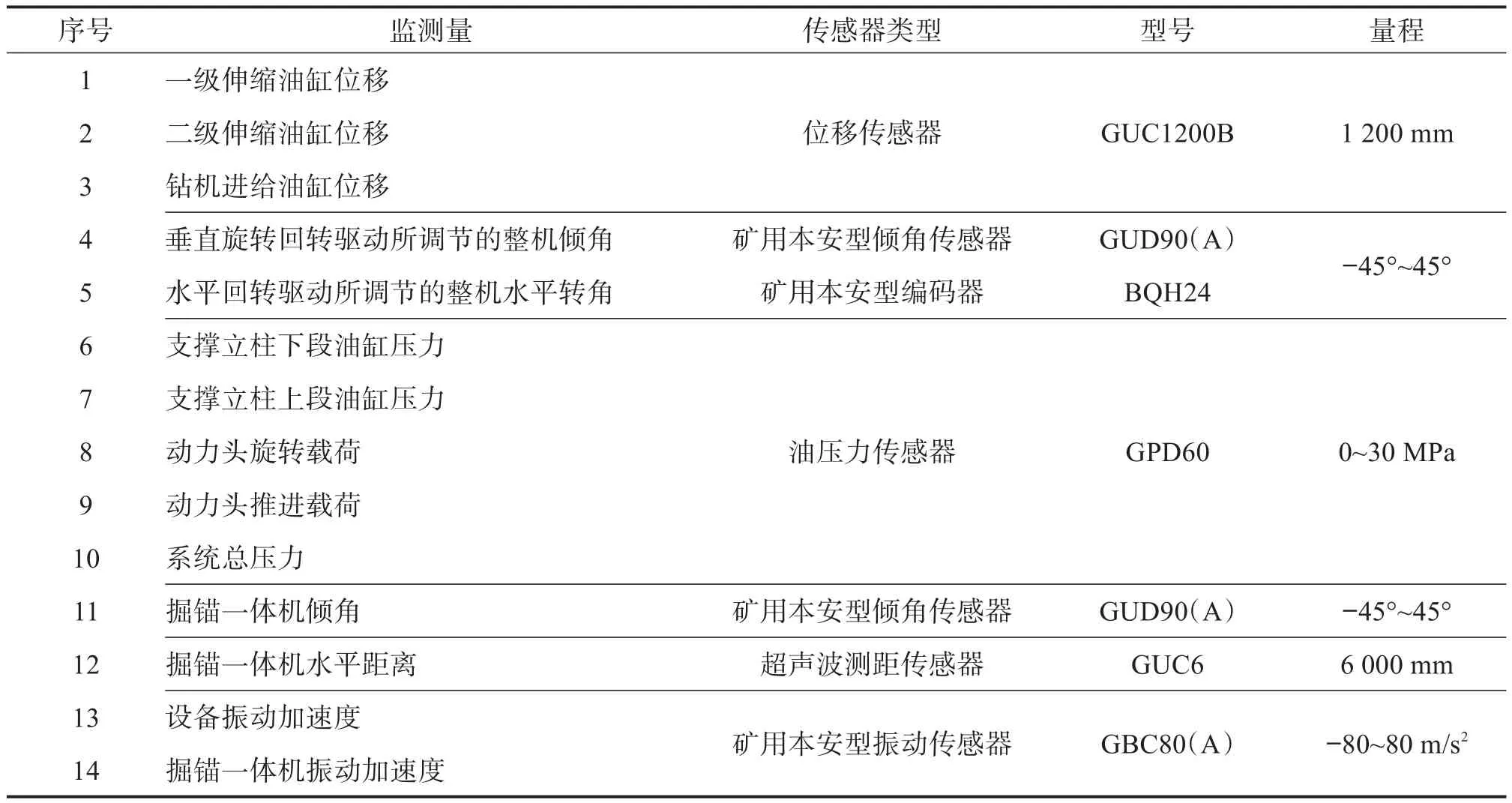
表1 探放水鉆機控制系統主要監測傳感器的型號及量程Table 1 Type and range of main monitoring sensors in the control system of water exploration and drainage drilling rig
所有傳感器的輸出信號為0.5~4.5 V的電壓信號。探放水鉆機控制系統的主要控制對象是液壓泵站的電動機和電磁防爆閥組[17-18]。電動機采用開關量控制;電磁防爆閥組采用STPSV55 C2C/240-3型七聯閥組控制,其控制信號為模擬量信號。電磁防爆閥組的型號和參數如表2所示。
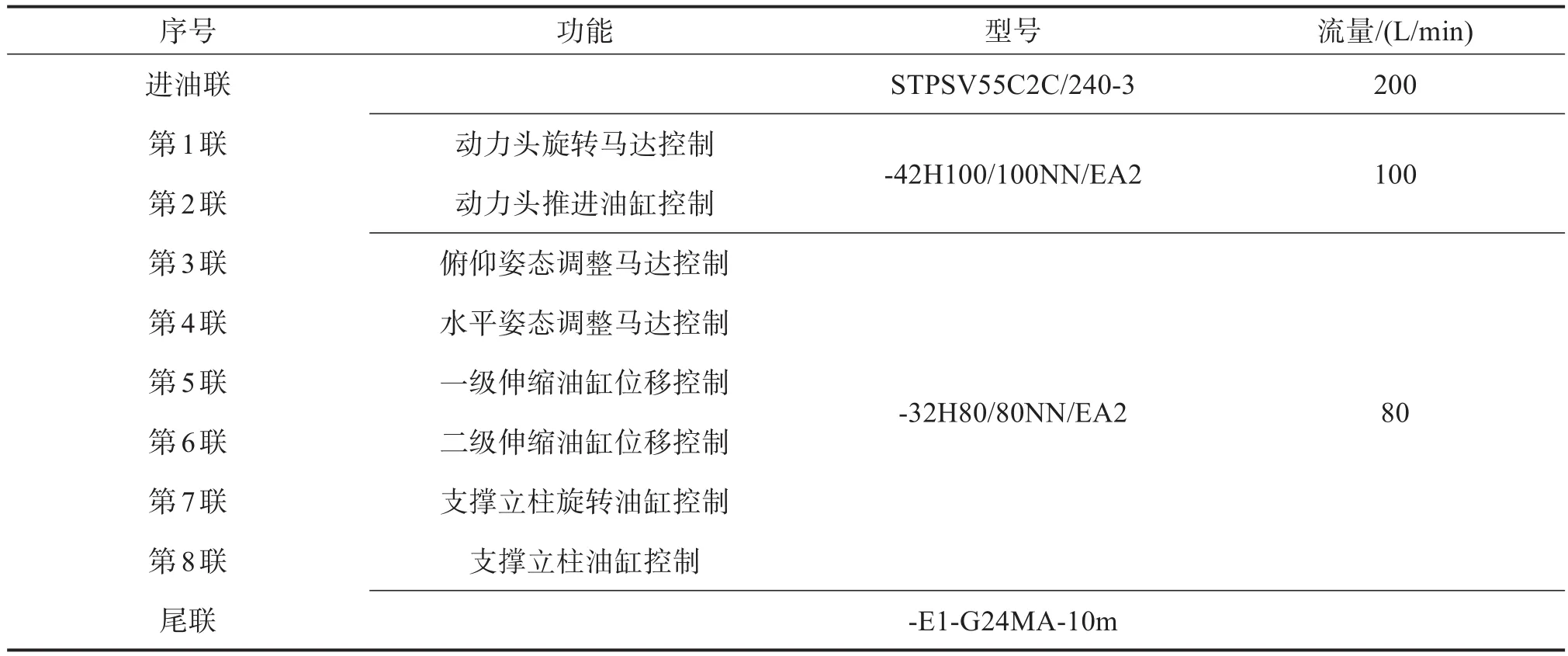
表2 電磁防爆閥組的型號和參數Table 2 Type and parameter of solenoid explosion-proof valve group
探放水鉆機控制系統核心采用西門子S7-200SmartPLC。
綜合以上分析,系統采用1個ST20CPU模塊、1個EM DT16數字量輸入/輸出模塊、2個EM AE08模擬量輸入模塊以及2個EM AQ04模擬量輸出模塊。PLC(programmable logic controller,可編程邏輯控制器)控制系統主要模塊的接線如圖4所示。
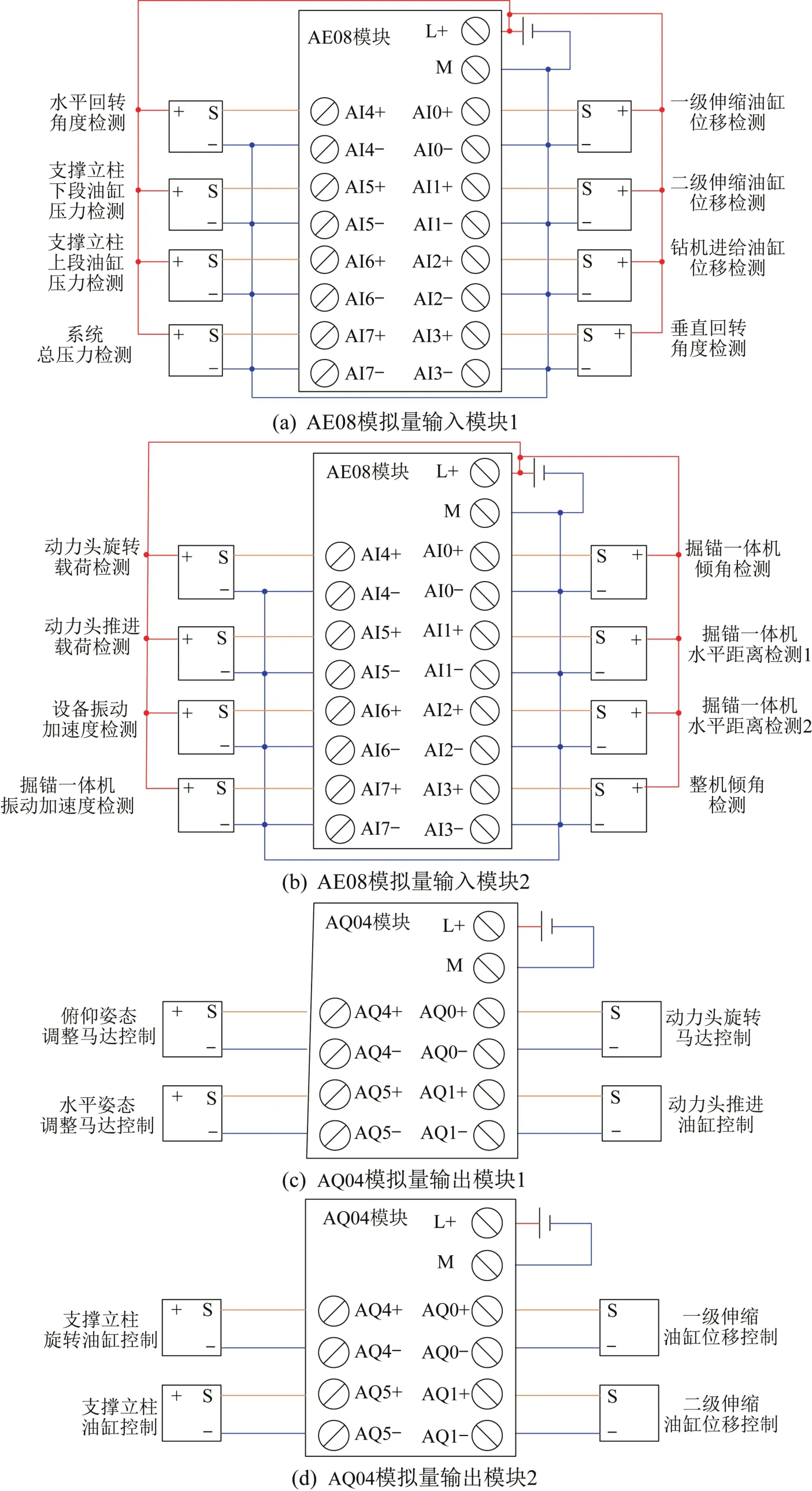
圖4 PLC控制系統主要模塊的接線Fig.4 Wiring of main modules of PLC control system
3 探放水鉆機控制系統工作流程
3.1 總體工作流程
探放水鉆機控制系統通過現場總線傳遞信號,進行精準的電液控制,實現高可靠性的智能錨護、健康診斷、設備狀況自檢等功能,從而可大幅度提高鉆探自動化水平,提升支護效率,降低勞動強度,保障安全。同時,其液壓系統管路較為簡單,系統可靠性較高[19-20]。
鉆探控制分為手動控制和自動控制兩種運行模式。在手動控制模式下,操作人員在操作臺手動操作電磁閥組,控制鉆機姿態和鉆探作業;在自動控制模式下,只需操作人員一鍵啟動,鉆機即可自動調節鉆機的位置和姿態進行自動鉆孔作業,在特殊情況下,可由人工進行干預,防止發生意外。鉆桿的更換則需要人工。
鉆探作業流程如圖5所示。
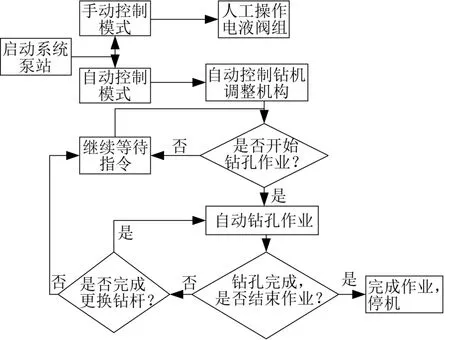
圖5 鉆探作業流程Fig.5 Drilling operation process
3.2 鉆進深度和鉆桿數量自動記錄流程
無論是手動鉆探控制還是自動鉆探控制,都須對鉆進深度以及煤壁中鉆桿的數量進行自動計算,因此設計了鉆進深度和鉆桿數量自動記錄子程序。自動記錄流程如圖6所示。

圖6 鉆進深度和鉆桿數量自動記錄流程Fig.6 Automatic recording process of drilling depth and drill pipe quantity
鉆進時,實時鉆桿數量等于PLC控制系統中鉆桿計數器的數量,實時鉆進深度=鉆桿數量×鉆桿長度+鉆進位移傳感器讀數。退鉆時,實時鉆桿數量等于PLC中鉆桿計數器的數量,存留鉆桿長度=記錄的鉆進深度-鉆桿數量×鉆桿長度-鉆進位移傳感器讀數。
3.3 卡鉆處理流程
結合現場施工經驗可知,卡鉆原因主要為:1)排渣不暢;2)裂隙卡鉆。因此設計了卡鉆處理程序,以及時解決卡鉆情況。卡鉆處理流程如圖7所示。通過壓力傳感器實時檢測鉆進壓力,當鉆進壓力超過設定閾值時,控制動力頭反轉且推進機構回退,以消除卡鉆現象,防止卡鉆對鉆機造成損壞。待鉆機回退后壓力降低,再次令動力頭正轉,推進鉆機繼續進行鉆探作業。
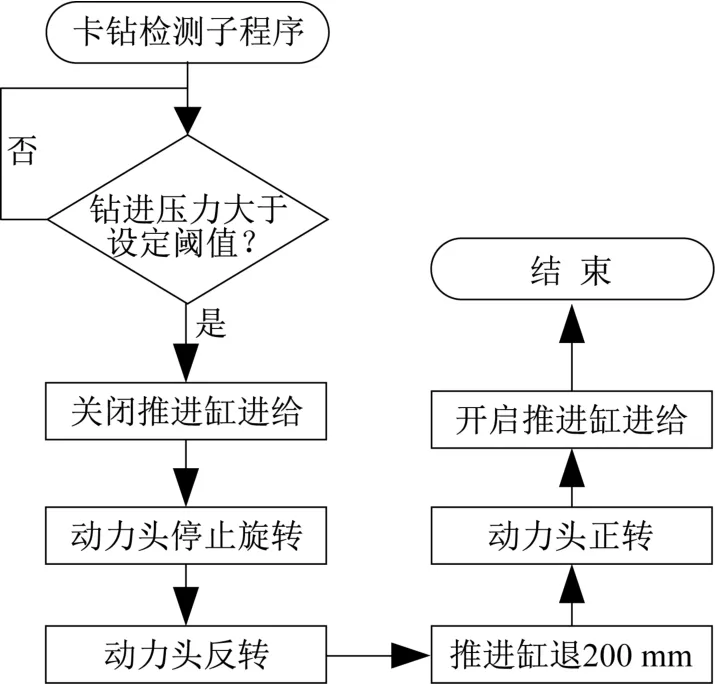
圖7 卡鉆處理流程Fig.7 Handling process of sticking
4 探放水鉆機控制系統的測試與分析
對所研制的掘錨一體機機載式探放水鉆機及其控制系統進行出廠前的廠內功能性試驗。由于采用的油缸缸徑較小,采用位移傳感器外置的方式對油缸行程進行實時測量。外置式油缸位移傳感器的安裝方式如圖8所示。

圖8 外置式油缸位移傳感器安裝方式Fig.8 Installation mode of external oil cylinder displacement sensor
掘錨一體機機載式探放水鉆機的監控界面如圖9所示。通過人機界面的存儲功能實時記錄和上傳探放水鉆機工作時的設備狀態數據和鉆進深度等。

圖9 掘錨一體機機載式探放水鉆機監控界面Fig.9 Monitoring interface of airborne water exploration and drainage drilling rig of excavating and anchoring all-in-one machine
在國能包頭能源有限責任公司李家壕煤礦進行現場測試,得到了在不同鉆進速度下鉆機的鉆進載荷和鉆進扭矩,如圖10所示。由圖可知,鉆進載荷和鉆進扭矩均基本與鉆進速度成線性關系,即鉆進速度越高,鉆進載荷和鉆進扭矩越大。
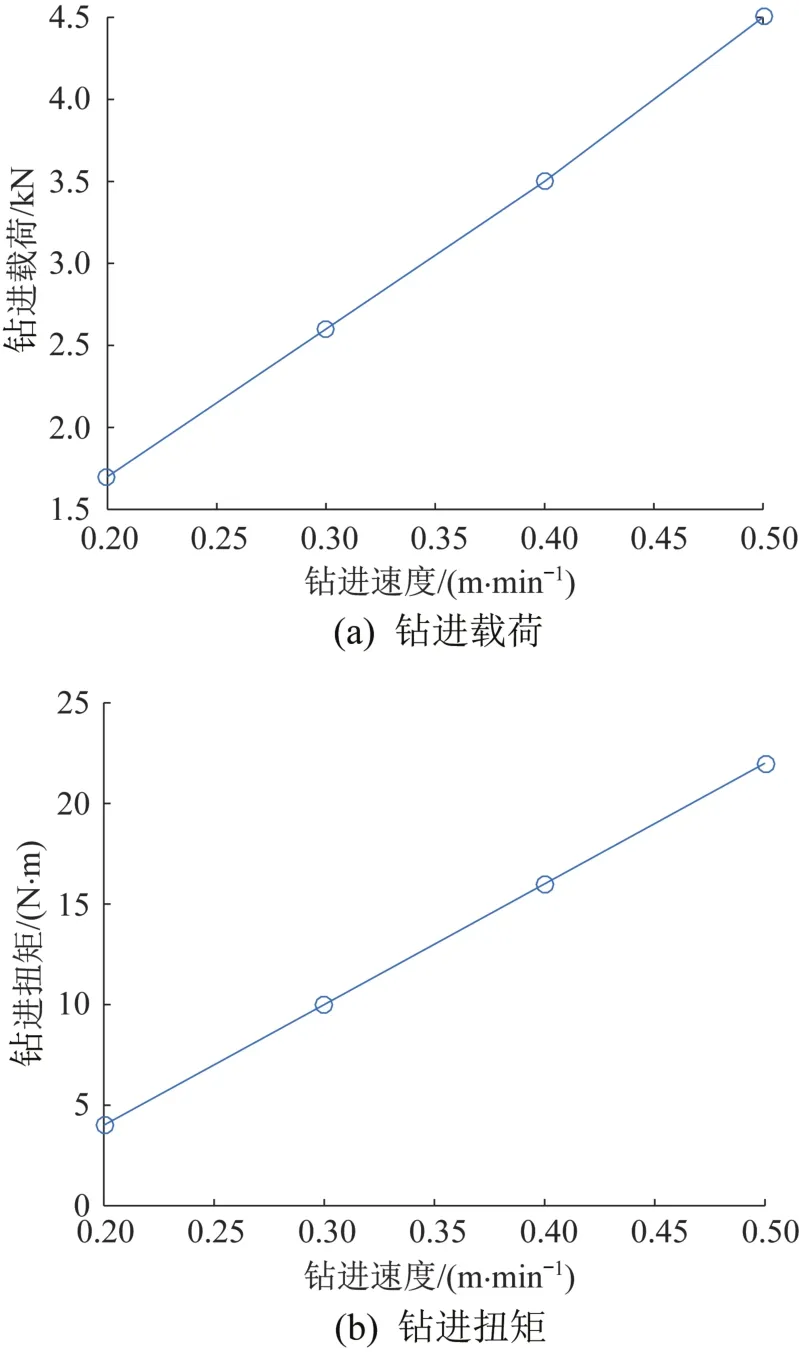
圖10 掘錨一體機機載式探放水鉆機現場測試結果Fig.10 Field test results of airborne water exploration and drainage drilling rig of excavating and anchoring all-in-one machine
同時,在李家壕煤礦的31115輔運順槽掘進工作面對機載式探放水鉆機進行現場工業性試驗。利用早班檢修時間,進行80~100 m探放水鉆孔作業,即探放水鉆孔作業不占用掘進作業時間。安裝在掘錨一體機上的探放水鉆機用于準備工作的時間比分離的坑道探放水鉆機減少80%。根據現場反饋,所研發的探放水鉆機具有較好的應用和推廣價值。
5 結 論
1)研制了掘錨一體機機載式探放水鉆機控制系統。通過系統軟硬件設計,實現了鉆機作業自動化。
2)設計了鉆進深度和鉆桿數量自動記錄程序,實現了鉆進深度的自動測量,為自動裝卸鉆桿的設計提供了依據。
3)通過廠內和井下工業性試驗驗證了所設計的探放水鉆機控制系統的可行性。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
現代裝飾(2020年7期)2020-07-27 01:27:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30
