具有Bazykin功能反應(yīng)的捕食者-食餌擴(kuò)散模型的穩(wěn)定性
2023-01-13 13:34:06趙明陽(yáng)孫福芹劉朋燕
趙明陽(yáng),孫福芹,劉朋燕
(天津職業(yè)技術(shù)師范大學(xué)理學(xué)院,天津 300222)
眾所周知,生態(tài)系統(tǒng)能夠反映物種與物種間、物種與自然環(huán)境間的相互作用,捕食者-食餌模型作為一類(lèi)經(jīng)典的生態(tài)系統(tǒng)模型,可以用來(lái)研究2個(gè)物種之間的動(dòng)態(tài)相互作用,對(duì)于維護(hù)生態(tài)系統(tǒng)中物種的穩(wěn)定性具有重要意義。在此基礎(chǔ)上,眾多學(xué)者深入分析捕食者-食餌相互作用的特征,構(gòu)建了帶有多種功能性反應(yīng)函數(shù)的捕食者-食餌模型,包括Holling I-III功能反應(yīng)、Holling-Tanner功能反應(yīng)、Beddington-Deangelis功能反應(yīng)以及Ratio-dependent功能反應(yīng)等[1-4]。然而,在對(duì)捕食者-食餌模型的研究中,鮮有文獻(xiàn)考察Bazykin功能反應(yīng)函數(shù)。Bazykin功能反應(yīng)可以描述捕食者飽和的不穩(wěn)定力量與獵物競(jìng)爭(zhēng)的穩(wěn)定力量,這對(duì)于了解種群之間的作用更具實(shí)際意義。另外,現(xiàn)實(shí)世界中的獵物和捕食者總是處于運(yùn)動(dòng)狀態(tài),為準(zhǔn)確模擬獵物和捕食者的動(dòng)態(tài)特征,需要在模型中考慮種群的空間擴(kuò)散[5-8]。因此,本文構(gòu)建一個(gè)具有Bazykin功能反應(yīng)的捕食者-食餌擴(kuò)散模型,研究模型的有界性和平衡點(diǎn)的存在性,并對(duì)平衡點(diǎn)的局部穩(wěn)定性、全局穩(wěn)定性以及Turing不穩(wěn)定性進(jìn)行分析。
1 模型組成和初步結(jié)果
1.1 模型組成
考慮了一個(gè)具有Bazykin功能反應(yīng)的捕食者-食餌擴(kuò)散模型[9]如下
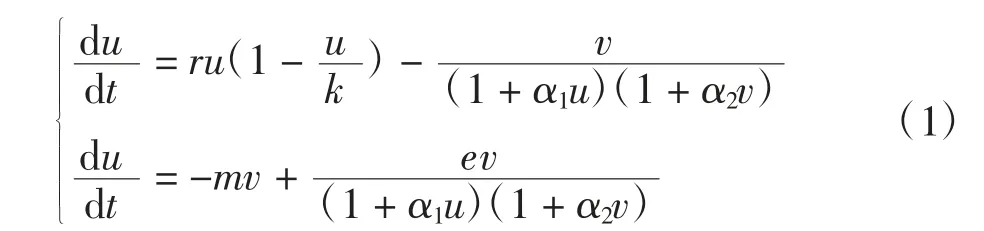
式中:u(t)為t時(shí)刻食餌種群的數(shù)量;v(t)為t時(shí)刻捕食者種群的數(shù)量;增長(zhǎng)率r∈R+;環(huán)境承載力k∈R+;e為食餌到捕食者的轉(zhuǎn)化率(0<e<1);m為捕食者的恒定自然死亡率。
Bazykin型功能性反應(yīng)函數(shù)為f(u,v)=1/(1+α1u)·(1+α2v)。其中,α1和α2為2個(gè)正常數(shù),且α1>α2,用來(lái)描述捕食者飽和的破壞穩(wěn)定力和爭(zhēng)奪獵物的穩(wěn)定力。
在現(xiàn)實(shí)世界中,獵物和捕食者始終處于運(yùn)動(dòng)狀態(tài),該現(xiàn)象可以利用自擴(kuò)散來(lái)模擬。假設(shè)所考慮的2個(gè)種群總是在運(yùn)動(dòng),每一個(gè)種群都遵循1條路徑,路徑的長(zhǎng)度用x表示。考慮以上假設(shè),模型(1)可以寫(xiě)為如下形式
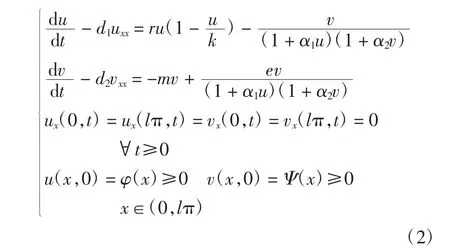
式中:d1、d2分別為食餌和捕食者的擴(kuò)散率;x為捕食者或食餌在時(shí)刻t所在的位置;lπ為所在區(qū)域的范圍。Neuman邊界條件表示食餌和捕食者的移動(dòng)距離為0~lπ。以上所有參數(shù)均為非負(fù)[10]。
1.2 平衡點(diǎn)的存在性
通過(guò)求解du/dt=0,dv/dt=0可以得到模型(2)的平衡點(diǎn),顯然,模型(2)有平衡點(diǎn)E0(0,0),E1(k,0)以及E2(u*,v*)。u*、v*可根據(jù)方程組(3)求解得出

1.3 有界性
下面給出問(wèn)題(2)解的有界性結(jié)論。
定理1當(dāng)u0(x)≥0,v0(x)≥0且不恒等于0時(shí),系統(tǒng)(2)有唯一解(u(x),v(x));當(dāng)t>0,x∈(0,lπ)時(shí),0<u(x,t)<u*(t)且0<v(x,t)<v*(t)。其中,(u*(t),v*(t))為常微分方程(4)的唯一解

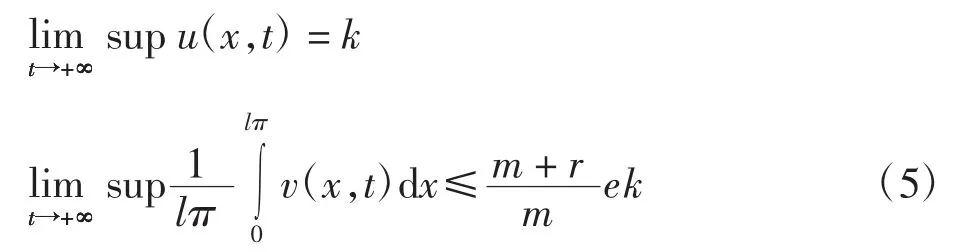
進(jìn)一步可以得到
證明令
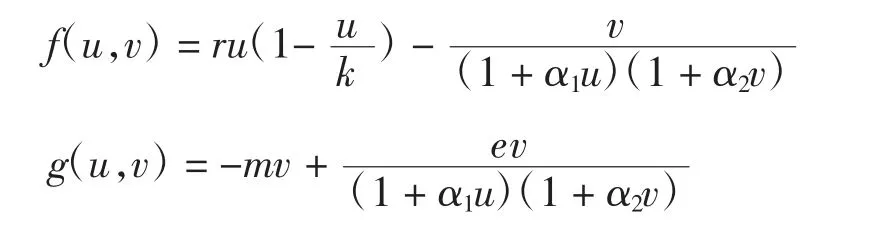
f和g的偏導(dǎo)數(shù)為
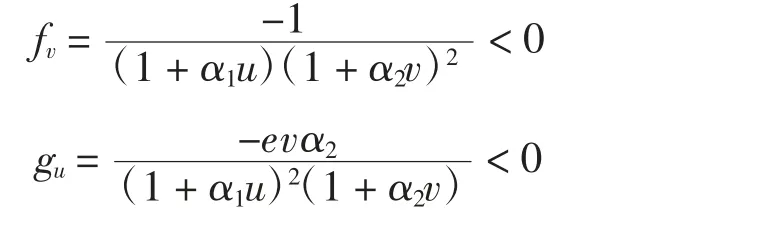
因此,f和g為L(zhǎng)ipschitz函數(shù),故存在正數(shù)c1、c2對(duì)于u1、u2、v1、v2有

令(u2(x,t),v2(x,t))=(u*(t),v*(t)),滿(mǎn)足方程

令u1(x,t),v1(x,t)=(0,0)滿(mǎn)足方程

其中,0≤u0(x)≤u0*,0≤v0(x)≤v0*,則(u1(x,t),v1(x,t)),(u2(x,t),v2(x,t))分別為系統(tǒng)(2)的上解和下解。強(qiáng)極大值原理表明,當(dāng)t>0且x∈(0,lπ)時(shí),u(x,t)>0,v(x,t)>0。至此,完成了第一部分的證明。
u(x,t)≤u*(t),v(x,t)≤v*(t),u*(t)為方程ut=ru(x)(1-u(x)/k)的唯一解,且u(0)=u0*>0。容易證明當(dāng)t→+∞時(shí),u*(t)→k。所以,對(duì)于?ε>0,?T0>0使得u(x,t)≤k+ε。從而得到,當(dāng)t>T0,x∈(0,lπ)時(shí),sup u(x,t)=k。
令
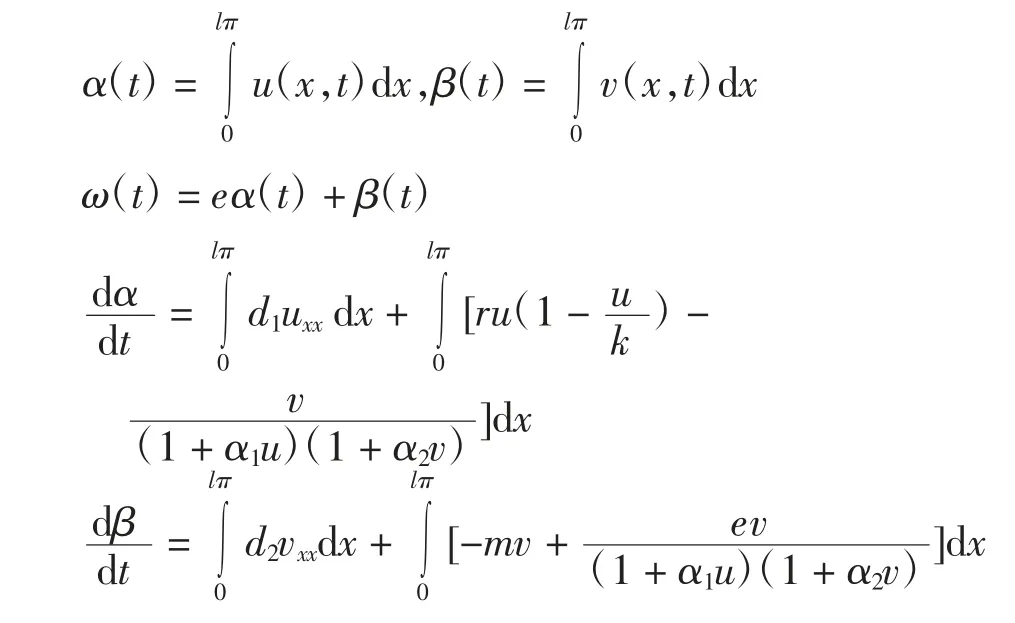
根據(jù)Neumann邊界條件
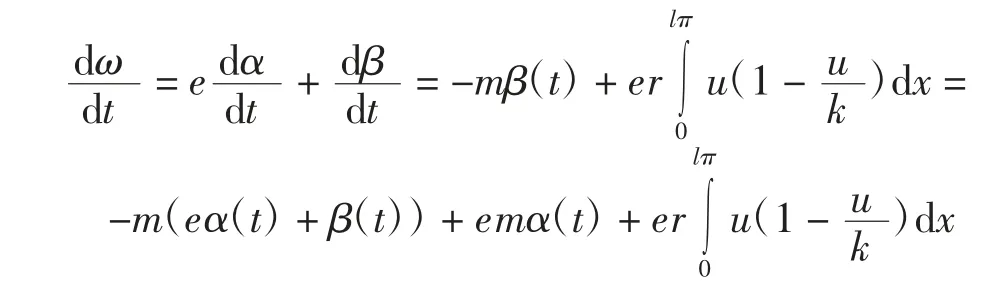
可以得到


得到

2 穩(wěn)定性分析
系統(tǒng)(2)在任意點(diǎn)(u,v)處的Jacobian矩陣為J=(mij)∈R2×2,

D=diag(d1+d2)及其對(duì)應(yīng)帶有Neumann邊界條件的實(shí)值Sobolev空間可定義為

其內(nèi)積為

相關(guān)χ的Hilbertian范數(shù)記為‖·‖2.2,相關(guān)的特征值問(wèn)題為

其中,kn=(n/l)2和cos(nx/l),n=1,2,3…分別為式(7)的特征值和特征函數(shù)。
2.1 E1(k,0)的局部穩(wěn)定性
平衡點(diǎn)E1(k,0)的線(xiàn)性化系統(tǒng)為Ut=DΔU+J(k,0)·U,矩陣-(n/l)2D+J(k,0)的特征值為

定理2當(dāng)R1=m+e/(1+α1k)<0時(shí),系統(tǒng)(2)在平衡點(diǎn)E1(k,0)處是局部漸近穩(wěn)定的。
2.2 E1(k,0)的全局穩(wěn)定性
分別定義系統(tǒng)(2)的上常數(shù)解和下解(u1,v1)=(k+ε,M)和(u2,v2)=(ε,0)。其中,ε、M為正常數(shù)且ε足夠小;定義()和(),m=1,2,3…為耦合拋物型方程[11]

和

根據(jù)Pao[11]的定理2.1


運(yùn)用比較定理證明方程u(x,t)≤γ(x,t),(x,t)∈[0,lπ]×[0,+∞],通過(guò)下面的拋物方程

得到t→+∞時(shí),γ(x,t)→k,在[0,lπ]×[t0,+∞]中,存在t0>0時(shí),u(x,t)≤k+ε,這意味著平衡點(diǎn)E1全局吸引,并且定理2證明了在滿(mǎn)足特定條件的情況下,E1局部漸近穩(wěn)定,因此能夠得到E1全局穩(wěn)定。
2.3 E2(u*,v*)的Turing不穩(wěn)定性
系統(tǒng)(2)在正平衡點(diǎn)(u*,v*)處的雅可比矩陣為

系統(tǒng)(2)寫(xiě)成如下形式


F(U)是圍繞平衡點(diǎn)E2(u*,v*)的非線(xiàn)性函數(shù)。
系統(tǒng)(2)在E2(u*,v*)處的線(xiàn)性化系統(tǒng)為:Ut=DΔU+J(u*,v*)U-(n/l)2D+J(u*,v*)。其中,-(n/l)2D+J(u*,v*)的矩陣為

矩陣(9)的特征值為方程(10)的解

Turing不穩(wěn)定性的存在需要滿(mǎn)足以下2個(gè)方面[12]:
(i)當(dāng)沒(méi)有擴(kuò)散時(shí),平衡點(diǎn)是線(xiàn)性穩(wěn)定的,D0(k)>0;
(ii)在擴(kuò)散存在時(shí),平衡點(diǎn)變得不穩(wěn)定,Dn(k)<0。
由于

所以

顯然D0(k)<0,由此可以得到Turing不穩(wěn)定性的不存在性。
3 結(jié)語(yǔ)
本文考慮了齊次Neumann邊界條件下,具有Bazykin功能反應(yīng)的捕食者-食餌擴(kuò)散模型。首先,證明了模型的有界性和平衡點(diǎn)的存在性,得到模型的3個(gè)平衡點(diǎn)E0、E1、E2;其次,證明了在沒(méi)有E2的情況下,E1的局部穩(wěn)定性以及全局穩(wěn)定性;最后,通過(guò)對(duì)平衡點(diǎn)E2(u*,v*)的特征方程進(jìn)行分析,證明Turing不穩(wěn)定性的不存在性。通過(guò)分析具有Bazykin功能反應(yīng)函數(shù)的捕食者-食餌擴(kuò)散模型的穩(wěn)定性,有助于未來(lái)對(duì)具有Bazykin功能反應(yīng)函數(shù)模型的分支問(wèn)題進(jìn)行更深一步的研究。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中華詩(shī)詞(2022年6期)2022-12-31 06:41:24
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國(guó)科技論壇(2017年7期)2017-07-25 08:49:53
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19