三維激光掃描在超高層傾斜監測中的應用
2023-01-15 08:31:12李樹文郭慶坤隋儉武
北京測繪 2022年11期
關鍵詞:模型
劉 斌 李樹文 楊 慧 孔 剛 郭慶坤 朱 君 隋儉武
(濟南市勘察測繪研究院, 山東 濟南 250001)
0 引言
隨著現代化施工工藝的提高,城市發展的加快,越來越多的超高層建筑作為區域地標而建立,而超高層傾斜監測一直是測量的重難點[1-3]。傳統的測量方法利用全站儀、激光測斜儀、數字正垂儀等進行超高層監測,數據采集費時費力,數據處理結果不夠形象直觀,難以獲取建筑表面細節特征[4-6]。
三維激光掃描技術隨著科技的發展,利用激光快速掃描,無須接觸,便得到海量點云數據,速度快、精度高,操作簡便,形象展現物體的三維信息,直觀表現立體模型,廣泛應用于城市建筑物測繪[7]、建筑物模型建立[8-9]、建筑物立面改造[10-12]、基坑改造測繪[13]等領域,為復雜測量問題提供了全新的解決方案,三維激光掃描技術在超高層傾斜監測領域,以建筑變形特征提取、模型建立與應用、變化趨勢擬合等為主[14-15],為分析超高層傾斜變化提供幫助。
本文以濟南平安金融中心超高層建筑為例,對其進行三維激光掃描,通過點云配準、模型擬合等過程,提取相應高度角點坐標進行傾斜率計算,通過與實測數據比較分析,驗證了此方法的可行性。
1 外業觀測
濟南平安金融中心位于濟南中央商務核心區,項目由塔樓和商業裙房組成,其中,塔樓分為地上62層,地下3層(局部4層)。塔樓建筑總高度360 m。
建筑施工過程中及竣工驗收前,需對建筑上部結構進行傾斜觀測,一般采用投點法選取塔樓外立面指定高度的四角進行傾斜監測。此方法獲取的數據量少,逐點采集費時費力。鑒于此,選取天寶TX8三維激光掃描儀進行超高層建筑掃描。天寶TX8三維激光掃描儀以360°×317°的視場和每秒1 000 000點的數據獲取速度,可以快速高效地完成測量任務,在其Extend模式下,測程可擴展至340 m。可有效對超高層核心筒進行掃描,其主要性能參數如表1所示。
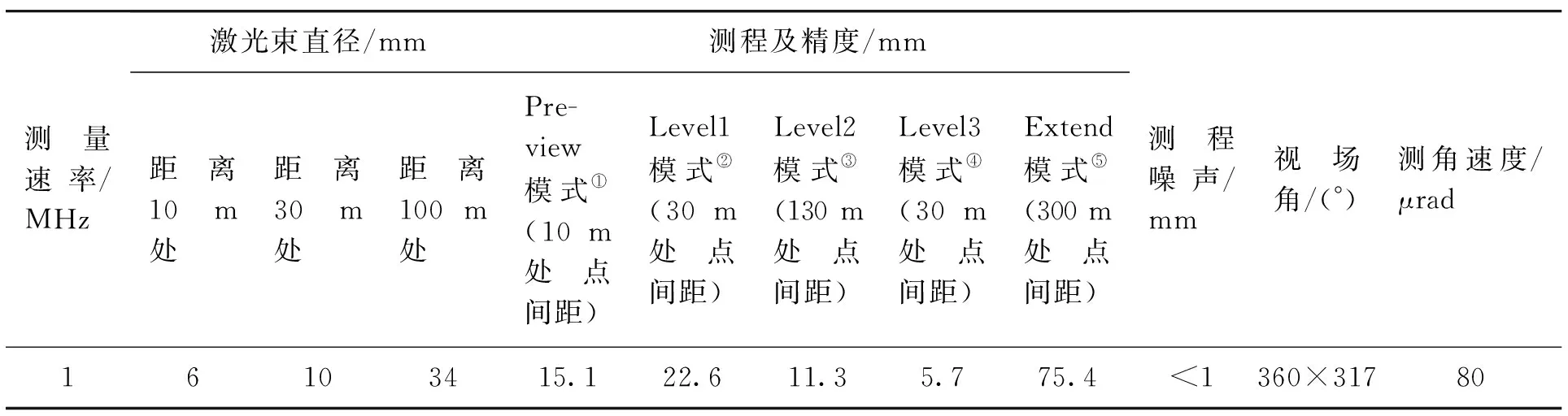
表1 天寶TX8三維激光掃描儀性能指標
利用濟南平安金融中心外圍已知控制點(平面、高程分別采用二級導線、二等水準進行測設),沿建筑東西兩側道路進行連續設站,測站間擺放標靶球用于后續配準,測量線路及外業數據采集情況如圖1所示。

圖1 三維激光掃描線路示意圖
考慮到測量效率與時間情況,本次采用Level1模式掃描全景,Extend模式局部掃描的方法。本次掃描共設站22站,測站間隔約30 m, 測站任意架站,測站間擺放標靶球用于配準,已知點上架設標靶球用于坐標轉換。
2 數據處理
2.1 點云配準
點云配準是將觀測數據拼接到同一個基準下,形成一個整體數據的過程。選取天寶點云數據處理軟件Trimble RealWorks進行數據處理。在點云配準過程中主要包括點云數據導入、靶球提取、網平差等步驟。
2.1.1靶球提取
點云數據導入后,利用測站間的標靶球將不同測站間點云進行配準,標靶球識別提取時利用目標分析器提取目標靶球。本項目共測量22站,提取標靶球120個,標靶球的擬合精度如表2所示。

表2 標靶球擬合精度統計分析表
從表2可知,標靶球擬合精度均未超過1.5 mm,其中,擬合精度在1.0~1.2mm之間的占63%,占比最大,擬合精度小于1mm的占31%,比例次之,擬合精度在1.2~1.5mm之間的占6%,占比最小;標靶球擬合精度最大值為1.5 mm,最小值為0.8 mm,平均值為1.0 mm。綜上所述,軟件進行標靶球提取時的擬合精度較高。
2.1.2網平差
標靶球提取完成后,導入已知點數據。利用基于名字的網平差,將點云數據進行配準融合,轉換到已知點坐標系下,實現點云數據向地理坐標數據間的轉換。網平差基于最小二乘原理,實現掃描數據與已知數據的最佳轉換。本項目共選取6個已知控制點,均勻分布于掃描線路上,網平差后的不同測站間同名標靶球殘差如圖2所示。

圖2 不同測站間同名標靶球殘差統計示意圖
由圖2可知,配準殘差小于1 mm的標靶球占46%,1~2 mm的占39%,2~3 mm的占10%,3~4 mm的占3%,大于4 mm的占2%;標靶球平均殘差為1.2 mm,最大殘差為4.0 mm,最小殘差為0.1 mm。綜上所述,本次點云利用標靶球進行配準精度較好。
已知點殘差統計如表3所示。

表3 已知點網平差殘差統計表
由表3可知,已知點殘差最大值為5.8 mm,最小值為0.9 mm,平均值為3.1 mm;有4個已知點均在2個測站間進行了掃描,不同測站之間殘差差值較小,最大殘差差值為1.6 mm,最小為0.7 mm,平均值為1.0 mm。綜上所述,利用已知點進行點云配準精度好,滿足三等點云配準后同名點內符合精度(≤25 mm)要求。
2.2 點云建模
點云配準完成后,為提取核心筒外立面指定高度處角點坐標,對點云數據進行分析建模,利用點云數據擬合模型,通過對擬合模型的數據分析,求得超高層建筑的傾斜變化。
2.2.1點云分割
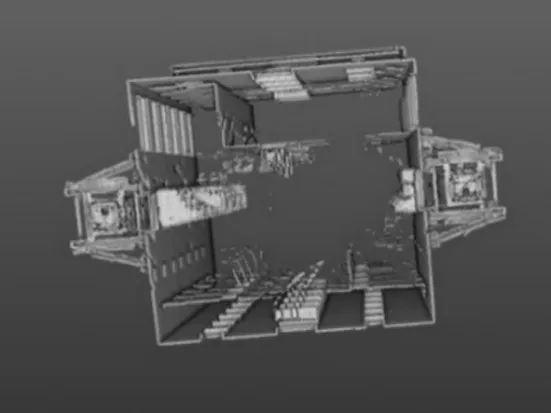
超高層建筑隨著施工進度的變化核心筒逐漸內收,本次點云數據掃描到指定高度處核心筒內收前后完整數據,掃描的核心筒位置縮略圖如圖3所示。
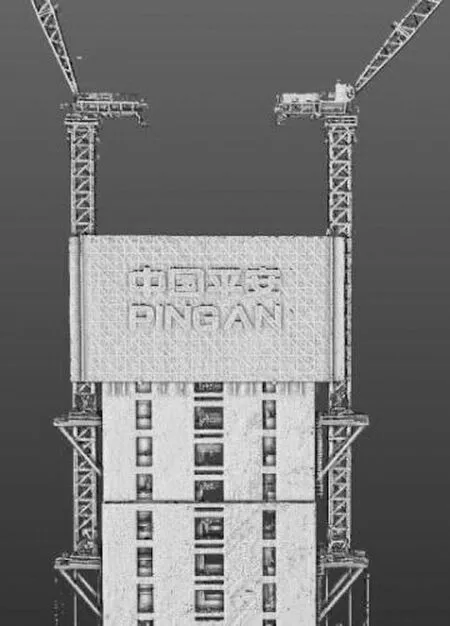
圖3 核心筒位置點云示意圖
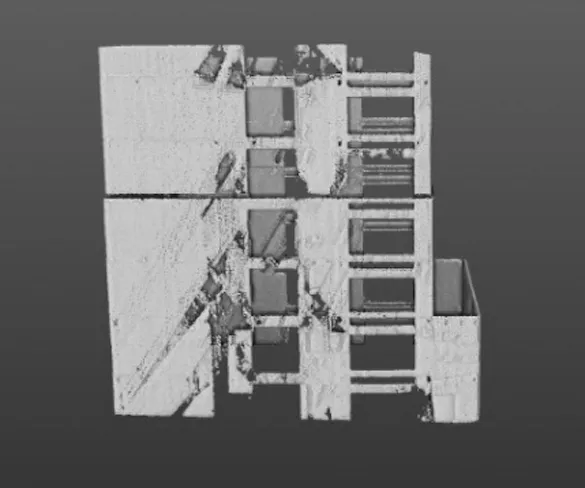
項目傾斜監測的主要對象是超高層建筑的核心筒位置,故首先對點云數據進行點云分割提取,利用點云分割提取工具,去除噪點,提取核心筒外立面規則點云數據,便于后續建模使用。點云分割提取如圖4所示。
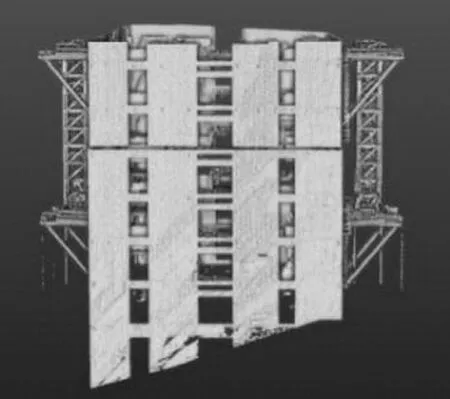
(a)分割去噪前
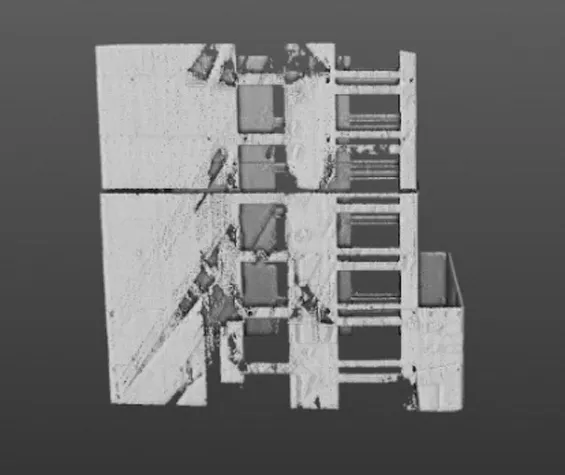

(b)分割去噪后圖4 點云分割示意圖
2.2.2點云建模
利用點云數據建模功能,根據分割提取的點云數據進行模型建立,擬合核心筒立體模型,核心筒模型建立如圖5的示意圖。
(a)提取點云數據

(b)擬合模型圖5 核心筒位置處點云建模示意圖
2.2.3數據提取
利用擬合模型構建三角網,利用平面分割工具,切割指定高度處三角網模型,生成指定高度處線框模型,利用坐標提取工具,提取線框角點坐標。數據提取過程如圖6所示。

(a)構建三角網
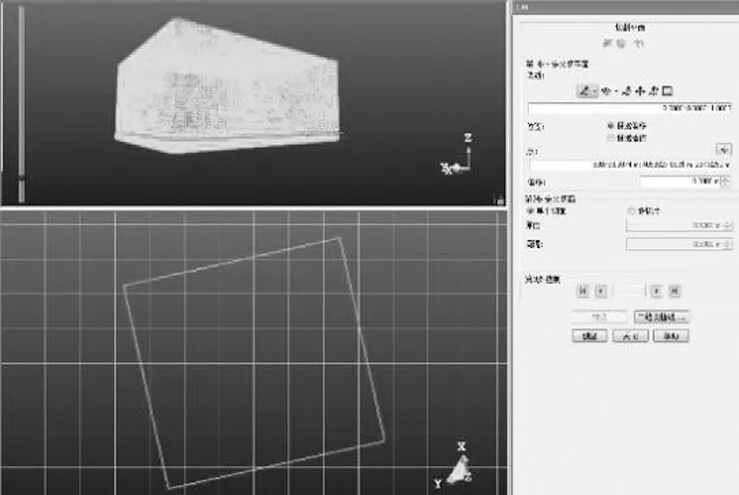
(b)平面切割模型圖6 角點數據提取示意圖
提取核心筒模型外立面角點坐標,對超高層建筑的傾斜變化進行數據計算分析,角點坐標內收修正后利用十字交叉法確定擬合中心點坐標,利用上部核心筒擬合中心點與一層中心點確定傾斜變化量。
3 精度分析
通過角點坐標提取,得到指定高度處核心筒外立面特征點坐標,并對其進行內收修正,根據修正坐標求得核心筒擬合中心點位置,擬合中心點采用軸角點十字交叉法確定坐標,提取角點坐標及擬合中心坐標與全站儀實測數據進行對比分析,差值情況如表4所示。
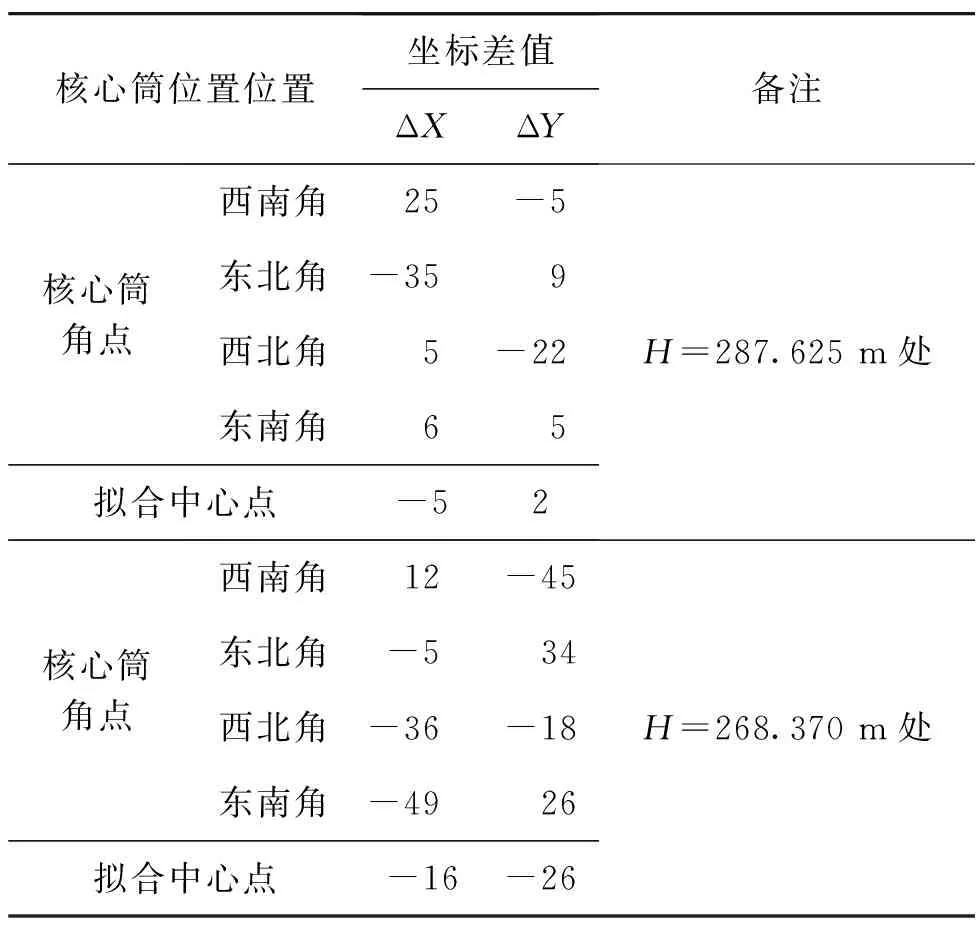
表4 模型提取坐標與實測坐標差值比較表 單位:mm
利用指定高度處中心點坐標與一層中心點坐標進行處理計算求得其傾斜變化率,傾斜變化率計算公式如下:
其中,x上、y上為上部核心筒中心點坐標;x1、y1為一層核心筒中心點坐標;h上為上部核心筒指定高程;h1為一層核心筒高程。
根據上式求得掃描儀數據的傾斜變化率、全站儀實測數據的傾斜變化率,兩者結果比較如表5所示。

表5 超高層傾斜變化率比較表
由表5可知,根據掃描儀擬合坐標求得的傾斜值與全站儀實測數據求得的傾斜變化率差值較小,且均在變形允許控制值以內,滿足超高層傾斜監測規范要求,證明了三維激光掃描儀在超高層傾斜監測應用中的可靠性。
4 結束語
三維激光掃描技術因其無接觸性、掃描速度快、精度高等優勢,越來越多地應用于精密測量領域。本文結合濟南平安金融中心傾斜監測項目,利用三維激光掃描儀對其進行掃描,經過標靶球提取、點云配準、點云分割去噪、點云建模、坐標提取等步驟,擬合超高層建筑的核心筒模型,通過提取角點坐標求得核心筒中心位置及傾斜變化率,通過與全站儀實測數據的對比分析,驗證了三維激光掃描儀在超高層傾斜監測中應用的可靠性,為超高層傾斜監測等類似項目提供了一種新的解決方案。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19