無刷直流電動機回饋制動控制策略研究
2023-01-16 09:08:08羅佳琪
上海電機學(xué)院學(xué)報 2022年6期
郭 炅, 羅佳琪
(武漢光谷職業(yè)學(xué)院 智能制造學(xué)院, 湖北 武漢 430070)
由于環(huán)境污染以及成本和油的可用性問題,電動汽車成為內(nèi)燃機動力汽車的替代品之一。隨著電力電子轉(zhuǎn)換器的進步,車輛使用無刷直流電動機(Brushless DC Motor,BLDCM)、永磁同步電動機和開關(guān)磁阻電動機等電機進行驅(qū)動[1-2]。其中,BLDCM 熱阻較小、散熱容易,結(jié)合機電一體化,具有高速度、高效率、高功率密度、大起動轉(zhuǎn)矩、高動態(tài)響應(yīng)、高熱容量和高可靠性、無換向火花、運行無噪聲、質(zhì)量輕、體積小等優(yōu)點[3-4]而被廣泛應(yīng)用。
電動汽車的動力電池存在技術(shù)瓶頸,限制了電動汽車的行駛里程,故研究其長續(xù)航策略[5]具有重要意義。有關(guān)研究表明,使用再生制動可將行駛里程提高8%~25%[6],但汽車制動過程中的平穩(wěn)性和舒適性同樣影響汽車的性能。由于常規(guī)控制方法下,汽車制動過程中轉(zhuǎn)矩波動較大,舒適性較差[7]。因此,利用再生制動回收能量,實現(xiàn)平穩(wěn)、快速的安全制動成為重點研究之一。
目前,電動汽車的能量回饋控制方法已經(jīng)有了許多研究成果。文獻[8-9]使用額外的DC-DC轉(zhuǎn)換器,實現(xiàn)再生制動,該轉(zhuǎn)換器將反電動勢提升到適當?shù)乃綖殡姵爻潆姟T摲椒ㄐ枰~外的轉(zhuǎn)換器,增加了系統(tǒng)的成本和重量,且降低了系統(tǒng)效率。文獻[10]采用與電池串聯(lián)或并聯(lián)連接的超級電容器實現(xiàn)再生制動,超級電容器存儲再生能量浪涌,并在額外轉(zhuǎn)換器的幫助下將其發(fā)送回電池,增加了整個系統(tǒng)的成本和重量。文獻[11]提出了一種單級轉(zhuǎn)換器驅(qū)動BLDCM 的控制方法,單級轉(zhuǎn)換器是以適當?shù)捻樞蚴┘娱_關(guān)脈沖切換單開關(guān)、雙開關(guān)和三開關(guān)等不同類型的制動方法,能在高速范圍內(nèi)產(chǎn)生所需的制動扭矩和更好的能量回收。上述文獻對BLDCM 回饋制動進行了研究,但未涉及對回饋制動電流的穩(wěn)定精確控制。文獻[12]基于單開關(guān)調(diào)制方法,提出了一種基于模型預(yù)測電流控制的恒值電流回饋制動控制策略,但相比恒定占空比調(diào)制方法,制動時間較長。
模型預(yù)測控制(Model Predictive Control,MPC)是近年來興起的一種新型控制方法,具有控制方便,動態(tài)響應(yīng)速度快等優(yōu)點[13]。本文以回饋制動狀態(tài)的BLDCM 控制系統(tǒng)作為研究對象,以提升BLDCM 回饋制動過程中汽車的舒適性、安全性,縮短制動停車時間,采用模型預(yù)測電流控制策略對回饋制動電流進行恒值電流控制。設(shè)置臨界轉(zhuǎn)速,對高轉(zhuǎn)速下的雙開關(guān)調(diào)制和低轉(zhuǎn)速下的單開關(guān)調(diào)制方法下的BLDCM 系統(tǒng),分別列寫狀態(tài)方程建立預(yù)測模型,預(yù)測系統(tǒng)下一時刻的制動電流,并通過建立目標函數(shù),滾動優(yōu)化以選取最優(yōu)開關(guān)占空比輸出,達到對制動電流的準確控制。最后通過仿真實驗證明了本文控制策略的有效性,實現(xiàn)了對回饋制動電流的有效控制,且相比單開關(guān)控制方法,有效縮短了制動停車時間。
1 BLDCM 回饋制動分析
1.1 回饋制動電路
BLDCM 處于回饋制動和電動狀態(tài)的拓撲結(jié)構(gòu)相同,回饋制動通過單級雙向DC/AC轉(zhuǎn)換器驅(qū)動BLDCM 實現(xiàn)。電動機工作在回饋制動模式時,電動機相電流與反電動勢的波形,以及單開關(guān)和雙開關(guān)調(diào)制回饋制動狀態(tài)時霍爾信號與開通功率器件的脈沖波形如圖1所示。圖中,Ea、Eb、Ec和ia、ib、ic分別為反電動勢和電樞電流;Ha、Hb、Hc為電機的3個霍爾傳感器信號;Sn上對應(yīng)上橋臂開關(guān)S1、S3、S5;Sn下對應(yīng)下橋臂開關(guān)S2、S4、S6。通過改變開關(guān)管導(dǎo)通順序,改變定子電流方向,從而切換電動機運行狀態(tài),達到制動的目的[14]。當電動機采用單開關(guān)調(diào)制制動方式時,只有下橋臂的S2、S4、S63個功率器件分別以120°電角度進行PWM調(diào)制,上橋臂S1、S3、S5始終關(guān)閉。當電動機采用雙開關(guān)調(diào)制制動方式時,上、下橋臂中各有一個開關(guān)在每個換向狀態(tài)下以PWM 開關(guān)模式運行[15]。電動機在單開關(guān)和雙開關(guān)回饋制動模式時的功率器件開關(guān)狀態(tài)見表1。
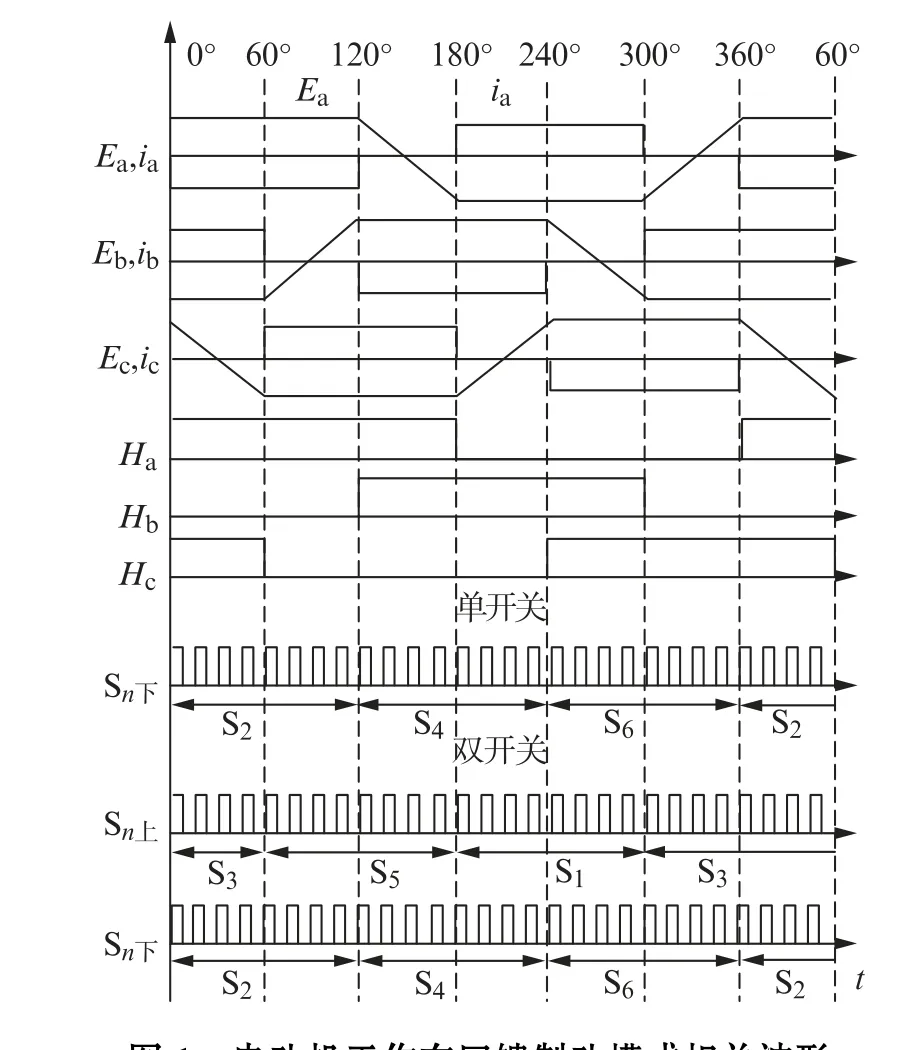
圖1 電動機工作在回饋制動模式相關(guān)波形
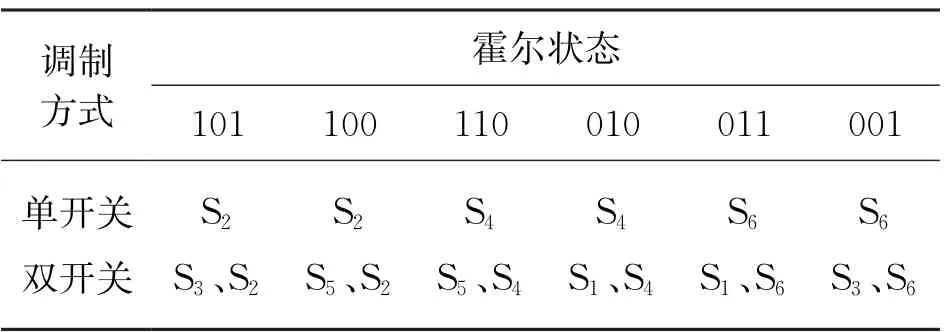
表1 霍爾開關(guān)狀態(tài)和不同調(diào)制方式下功率器件的對應(yīng)關(guān)系
1.2 回饋制動過程分析
在BLDCM 的雙開關(guān)管回饋制動中,每個換相狀態(tài)下電動機的電壓方程相同。因此,只需分析電動機在某一個60°電角度區(qū)間內(nèi)的回饋制動原理。以S2、S3進行PWM 控制為例進行分析,電動機回饋制動過程中電流的流向如圖2所示。圖中,UDC為電源;R、L分別為相電阻和相電感、D1~D6為續(xù)流二極管。
當S2、S3開通時,電流如圖2(a)中方向流動,電動機處于制動狀態(tài),電感儲能。忽略S2、S3的管壓降,此時繞組回路的電壓方程為
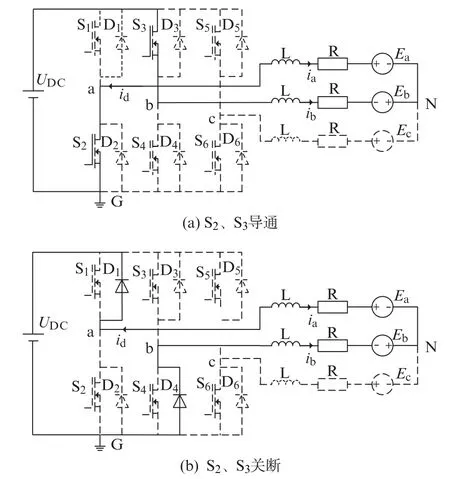
圖2 雙開關(guān)管回饋制動電流流向

在雙開關(guān)管回饋制動下,S2、S3處于開通時,電流處于上升階段,上升時間為D1T,假定初始電流為I10,此過程制動電流表達式為

S2、S3處于關(guān)斷時,電流處于下降階段,下降時間為(1-D1)T,假定初始電流為I1D,此過程制動電流表達式為

在每個PWM周期T內(nèi),電動機相電流隨功率管開關(guān)而波動。設(shè)一個周期內(nèi)開關(guān)管導(dǎo)通占空比為D1,D1∈(0,0.5),根據(jù)狀態(tài)空間平均法,由式(4)、式(6)可得穩(wěn)態(tài)時電機繞組的平均制動電流表達式為

BLDCM 在單開關(guān)管回饋制動中,同理不同狀態(tài)下電動機的電壓方程相同。因此,以S2進行PWM 控制為例進行分析。當S2處于開通狀態(tài)時,電流如圖3中方向流動。

圖3 單開關(guān)管回饋制動,S2 開通時電流流向
忽略S2、D4的管壓降,同理可得

當S2處于關(guān)閉狀態(tài)時,電動機繞組電流不能突變,電流方向與圖2(b)相同,此時電壓、電流關(guān)系與式(5)相同。
在單開關(guān)管回饋制動下,S2處于開通狀態(tài)時電流處于上升階段,上升時間為D2T,假設(shè)開始電流大小為I20,此過程制動電流表達式為

同理,S2處于關(guān)斷狀態(tài)時電流處于下降階段,下降時間為(1-D2)T,假定初始電流為I2D,此過程制動電流表達式為

在每個PWM 周期T內(nèi),電動機相電流隨功率管開關(guān)而波動。設(shè)一個周期內(nèi)開關(guān)管導(dǎo)通占空比為D2,D2∈(0,1),根據(jù)狀態(tài)空間平均法,由式(9)、式(10)可得穩(wěn)態(tài)時電動機繞組的平均制動電流表達式為

由式(7)、式(11)可以看出,通過采樣電動機反電動勢以及電源電壓,可以調(diào)控開關(guān)管的占空比,控制電動機的制動電流和制動轉(zhuǎn)矩。
1.3 停止時間計算
制動時,BLDCM 的簡化型動力學(xué)狀態(tài)方程為

式中:J為轉(zhuǎn)動慣量;ω為角速度;t為時間;Kt為電動機轉(zhuǎn)矩常數(shù)。
穩(wěn)態(tài)時,單開關(guān)調(diào)制方法的制動電流方程如式(11)所示,將式(11)代入式(12)中,可得單開關(guān)調(diào)制方法的減速度表達式為
式中:D1∈(0,0.5)。
對比式(13)、式(14)可以看出,當Dn=0.5時,單開關(guān)的減速度較小,制動停止時間較長,而電動機從電動狀態(tài)切換到制動狀態(tài)的過程中,占空比的調(diào)節(jié)需要一定的過渡時間。相比單開關(guān)調(diào)制達到最大占空比1,雙開關(guān)調(diào)制能更快接近0.5。因此,雙開關(guān)調(diào)制方法的制動時間較短。
此外,雙開關(guān)調(diào)制方法和單開關(guān)調(diào)制方法的區(qū)別主要是續(xù)流階段的電路狀態(tài)。在續(xù)流階段,雙開關(guān)調(diào)制方法下,電路中蓄電池串入續(xù)流回路,并有能量輸出。電池能量輸出的大小隨電動機轉(zhuǎn)速的降低而增大,由于制動時轉(zhuǎn)速的降低,導(dǎo)致回饋制動存在一個臨界轉(zhuǎn)速,當電動機轉(zhuǎn)速低于臨界轉(zhuǎn)速時,電池輸出能量大于電動機回饋能量,需要借助其他方式進行制動[16]。單開關(guān)調(diào)制方法回饋制動不僅易于實現(xiàn),開關(guān)損耗較小,能量流動合理[17],并且結(jié)合MPC方法,對回饋制動電流進行恒值電流控制,可以精確控制制動電流,保證制動穩(wěn)定性[18]。對此,本文考慮設(shè)置臨界轉(zhuǎn)速,基于MPC對雙開關(guān)和單開關(guān)分階段調(diào)制進行回饋控制。
2 控制策略
為了精確控制制動電流,本文控制系統(tǒng)采用模型預(yù)測電流控制策略,BLDCM 回饋制動系統(tǒng)如圖4所示。圖中,i*(k+1)為目標制動電流;ip(k)為第k時刻的預(yù)測電流值;i(k)為第k時刻的電流采樣值。通過離散化數(shù)學(xué)模型預(yù)測出制動電流第k+1時刻的預(yù)測值,建立目標電流i*(k+1)與預(yù)測電流偏差的目標函數(shù),滾動優(yōu)化,選取使目標函數(shù)最優(yōu)的控制占空比,并在下一時刻輸出。通過上述分析,在平穩(wěn)制動的前提下進一步縮短電動機的制動時間,考慮將電動機的制動過程分階段進行,設(shè)置臨界轉(zhuǎn)速,在臨界轉(zhuǎn)速以上,用雙開關(guān)調(diào)制方法進行制動;在臨界轉(zhuǎn)速以下,用單開關(guān)調(diào)制方法進行制動。
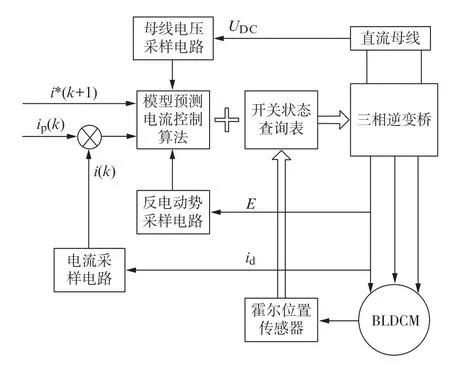
圖4 BLDCM 回饋制動系統(tǒng)框圖
對雙開關(guān)調(diào)制方法進行預(yù)測,將式(7)離散化處理,可得k1+1時刻的制動電流預(yù)測值為
式中:U(k1)、U(k2)、E(k1)、E(k2)、D1(k1)、D2(k2)分別為雙開關(guān)調(diào)制、單開關(guān)調(diào)制方法下當前的相電壓、相反電動勢、調(diào)制相的PWM 占空比。
對預(yù)測模型在線修正,設(shè)k時刻BLDCM 系統(tǒng)的實際電流與預(yù)測電流的誤差表達式為

其中,n=1,2。利用此誤差對預(yù)測模型進行反饋校正,校正后kn+1時刻的輸出為

式中:hn為誤差修正系數(shù)。
為選取最優(yōu)占空比,使制動電流盡可能保持恒定,性能指標表達式為

式中:p為預(yù)測誤差加權(quán)系數(shù);q為控制量加權(quán)系數(shù);i*vn為目標制動電流,其中n=1,2。
3 實驗結(jié)果與分析
為了驗證所提出算法的有效性,本文搭建了Simulink仿真實驗系統(tǒng)進行仿真實驗。制動控制系統(tǒng)中BLDCM 額定電壓為300 V,額定轉(zhuǎn)速為3 000 r/min,開關(guān)頻率設(shè)置為20 k Hz。采用單開關(guān)調(diào)制模型預(yù)測電流控制算法、雙 單開關(guān)分階段恒定占空比控制算法,以及本文提出的雙 單開關(guān)分階段模型預(yù)測電流控制算法,對BLDCM 回饋制動電流進行控制。實驗時BLDCM 制動初始轉(zhuǎn)速為3 000 r/min,在此轉(zhuǎn)速下開始回饋制動。依據(jù)工程經(jīng)驗,雙開關(guān)、單開關(guān)調(diào)制的臨界轉(zhuǎn)速設(shè)置為1 500 r/min,機械制動的臨界轉(zhuǎn)速為200 r/min[19-20]。采用單開關(guān)調(diào)制模型預(yù)測電流控制算法進行實驗時,當電動機轉(zhuǎn)速高于200 r/min,采用單開關(guān)調(diào)制模型預(yù)測電流控制算法,轉(zhuǎn)速低于200 r/min時采取機械制動。在雙 單開關(guān)分階段恒定占空比控制算法和本文算法進行實驗時,轉(zhuǎn)速高于1 500 r/min,采用雙開關(guān)調(diào)制方法,轉(zhuǎn)速低于1 500 r/min,采用單開關(guān)調(diào)制方法,轉(zhuǎn)速低于200 r/min時采取機械制動。
采用雙 單開關(guān)分階段恒定占空比控制算法,雙開關(guān)調(diào)制占空比為0.5,單開關(guān)調(diào)制占空比為1時,電動機轉(zhuǎn)速、制動相電流波形如圖5所示,對應(yīng)制動過程中的相電流放大波形如圖6所示。
由圖5(a)可知,恒定占空比調(diào)制下,電動機轉(zhuǎn)速從3 000 r/min降速到200 r/min所需時間為0.235 s。由圖6可知,恒定占空比調(diào)制下,電流波動范圍為-25~25 A,制動電流波動較大。

圖5 雙 單開關(guān)分階段恒定占空比控制算法相關(guān)波形

圖6 制動相電流放大波形
在電流參考值10 A 條件下,采用單開關(guān)調(diào)制模型預(yù)測電流控制算法,以及雙 單開關(guān)分階段模型預(yù)測電流控制算法,對應(yīng)電動機轉(zhuǎn)速、制動相電流波形如圖7、圖8所示,制動過程中的相電流放大波形如圖9所示。

圖7 單開關(guān)調(diào)制模型預(yù)測電流控制算法相關(guān)波形
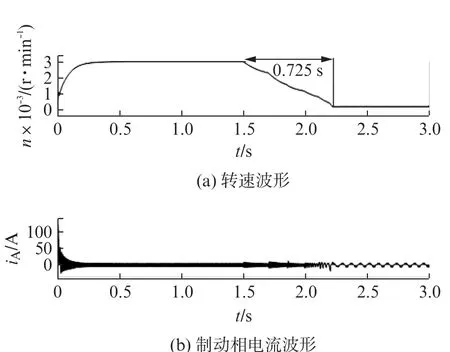
圖8 雙 單開關(guān)分階段模型預(yù)測電流控制算法相關(guān)波形

圖9 電流參考值10 A條件下制動相電流放大波形
由圖7(a)可知,在單開關(guān)調(diào)制模型預(yù)測電流控制下,電動機轉(zhuǎn)速從3 000 r/min降速到200 r/min所需時間為1.105 s。由圖8(a)可知,在雙 單開關(guān)分階段模型預(yù)測電流控制下,電動機轉(zhuǎn)速從3 000 r/min降速到200 r/min所需時間為0.725 s。由圖9可知,在電動機轉(zhuǎn)速降到200 r/min之前,相比單開關(guān)調(diào)制模型預(yù)測電流控制,在雙 單開關(guān)分階段模型預(yù)測電流控制下,電流的波動有所增大,但是兩種控制方法下電流的波動均在-10~10 A 的范圍內(nèi)。
根據(jù)上述實驗結(jié)果,相比雙 單開關(guān)分階段恒定占空比控制,在模型預(yù)測電流控制下兩種控制方法的電流波動范圍均縮小1/2。為保證電動機的平穩(wěn)制動,采用模型預(yù)測電流控制方法較好,但與單開關(guān)調(diào)制模型預(yù)測電流控制算法相比,雙 單開關(guān)分階段模型預(yù)測電流控制算法有更快的制動速度,參考電流為10 A時,制動時間縮短了34.4%。因此,采用雙 單開關(guān)分階段模型預(yù)測電流控制算法,不僅對回饋制動電流具有更好的控制精度,增加了汽車的舒適性,且極大程度縮短了汽車制動停車所需的時間,進一步增強了制動的安全性。
4 結(jié) 語
為提升電動汽車制動時的安全性和舒適性,縮短制動時間,針對BLDCM 控制系統(tǒng)提出了一種新型的制動控制策略。該策略基于雙、單開關(guān)分階段調(diào)制回饋制動方式進行研究,設(shè)置臨界轉(zhuǎn)速,建立預(yù)測模型、目標函數(shù),以滾動優(yōu)化的方式在線調(diào)節(jié)電流,實現(xiàn)制動電流的穩(wěn)定輸出。最后通過仿真實驗驗證了本文策略的有效性,保證了制動電流的精確控制,在一定程度上縮短了汽車制動停車所需的時間。采用本文方法不僅能延長電動汽車的續(xù)航里程,且進一步保證了駕駛?cè)藛T的人身安全。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56