C波段多普勒天氣雷達定標原理分析
2023-01-18 00:28:32任慧芳李林蔚王志偉
氣象水文海洋儀器 2022年4期
劉 方,任慧芳,李林蔚,劉 斌,王志偉,葉 飛
(1.內蒙古大氣探測技術保障中心,呼和浩特 010051;2.土默特左旗氣象局,呼和浩特 010105;3.湖南省氣象技術裝備中心,長沙 410000)
0 引言
截至目前,內蒙古自治區共有10部C波段多普勒天氣雷達。為保證雷達的正常運行,省級技術人員會在汛期前后開展兩次維護工作,對雷達不同系統的參數進行測量,調整參數至正常狀態,以保證雷達的正常運行。雷達系統的整體性能由發射系統和接收系統決定,因此文章將對C波段多普勒天氣雷達發射系統、接收系統的定標原理與方法進行分析和討論。
1 發射系統
1.1 發射脈沖包絡
發射脈沖包絡測試內容包括:包絡寬度τ、上升時間τr、下降時間τf以及頂降δ。圖1為發射脈沖包絡示意圖,脈沖包絡的最大幅度為Umax,脈沖包絡的平頂為Um,從脈沖包絡前沿0.7Um到脈沖包絡后沿0.7Um為包絡寬度τ;脈沖包絡前沿0.1Um到0.9Um為上升時間τr;脈沖包絡后沿0.9Um到0.1Um為下降時間τf;頂降δ可由公式(1)計算得到:
(1)
發射脈沖包絡采用機外儀表測試。圖2為發射脈沖包絡測試框圖,發射信號通過雷達饋線中的定向耦合器耦合輸出,并通過測試電纜、衰減器接入檢波器和示波器,設置示波器顯示完整包絡形狀,讀取發射脈沖包絡的各種參數。對于不同脈寬、不同重復頻率應分別測量。需要注意的是在切換不同脈沖寬度時首先要關閉發射機高壓,然后進行脈沖切換,否則容易造成發射機損壞。
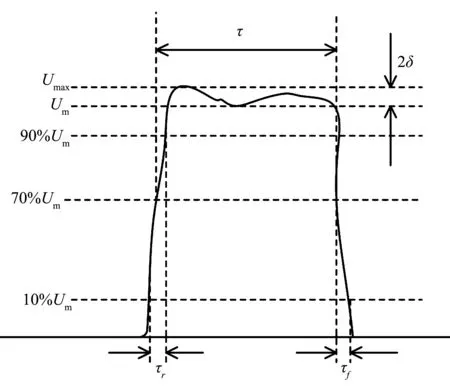
圖1 發射脈沖包絡示意圖

圖2 發射脈沖包絡測試框圖
1.2 發射機峰值功率
雷達的最大探測距離Rmax可由公式(2)計算得到,雷達方程在接收機性能固定的情況下雷達發射信號的峰值功率決定了雷達的最大探測距離,所有在對雷達發射系統定標時要對發射機峰值功率進行檢測。
(2)
式中,Pt為雷達發射信號峰值功率;G為天線增益;Ae為天線有效接收面積;δ為目標物等效后向散射面積;Smin為接收機最小可測信號。
發射機峰值功率,采用機外儀表測試法和機內自動測試法。通過雷達饋線中的定向耦合器將發射信號耦合輸出,并通過測試電纜、衰減器接入機外(或機內)功率計,設置功率計即可顯示發射脈沖的峰值功率,C波段多普勒天氣雷達要求峰值發射功率不小于250 kW。對于不同脈寬,不同重復頻率應分別測量。使用機外儀表測試時需要注意的是測試之前要對功率計進行校零,校零之后重新設置功率計的工作頻率、偏移量(Oset)以及占空比(Dt)。
Oset=Lc+L1+L2+d
(3)
式中,Lc為發射機耦合器的耦合度,可從耦合器銘牌上查詢;L1為固定衰減器的衰減值;L2為測試電纜損耗;d為其他損耗,可根據實際情況確定。

(4)
式中,τ為發射脈沖寬度;F為脈沖重復頻率。
1.3 極限改善因子
新一代天氣雷達采用脈沖多普勒體制,系統的相干性直接影響了雷達對回波信號譜參數的估計和系統的地物對消能力。雷達系統的相干性指雷達系統內各信號的頻率是穩定的,信號的初相位是相同的,或相互之間存在固定的關系。雷達的相干性指標可用極限改善因子來反映,極限改善因子分為發射機輸入極限改善因子和輸出極限改善因子兩項測試內容,參照普來賽西門子雷達公司提供的測試方法,用頻譜儀檢測信號功率譜密度分布[2]。極限改善因子的計算方法如公式(5):

(5)

極限改善因子采用機外儀表測試方法。通過雷達饋線中的定向耦合器將發射信號耦合輸出,并通過測試電纜、衰減器接入頻譜儀,設置頻譜儀測量發射及輸出信號的信噪比,經計算可得出發射機輸出極限改善因子。需要注意的是測試發射機輸出信號噪聲比時需要打開發射機高壓并且頻譜儀與定向耦合之間要接入衰減器,測試發射機輸入信號噪聲比時不需要開高壓和連接衰減器。C波段雷達測試極限改善因子時公式(5)中B取3 Hz,F為測試時雷達實際的工作頻率。
2 接收系統
2.1 接收機噪聲系數
由于放大器自身有噪聲,輸出端的信噪比和輸入端信噪比不相同,為此,使用噪聲系數來衡量放大器自身的噪聲水平。噪聲系數可定義為接收系統輸入端信號噪聲比(Si/Ni)與輸出端信號噪聲比(So/No)的比值,可用公式(6)表示:

(6)
目前C波段多普勒天氣雷達噪聲系數采用Y因子測量方法,當噪聲源不通電時,接收系統的輸出噪聲為溫度T0=290 K時的熱噪聲,噪聲功率為N1;當噪聲源通電時,接收系統的輸出噪聲為溫度T2時的熱噪聲,噪聲功率為N2。溫度T2是噪聲源的有效噪聲溫度,與有效超噪比ENR之間的關系可用公式(7)表示:

(7)
噪聲系數可以用公式(8)表示:

(8)
將公式(7)代入公式(8)中,同時噪聲系數用分貝表示為NF,接收機輸出噪聲功率N1和N2也用分貝表示為P1,P2,可得公式:
NF=ENR有效-10lg(100.1(P2-P1)-1)
(9)
式中,ENR有效為有效噪聲源超噪比(單位:dB);P1為斷開噪聲源的讀數(單位:dBm);P2為接通噪聲源的讀數(單位:dBm)。
噪聲功率P1,P2的測量可通過雷達系統或噪聲系數測試儀完成,即噪聲系數測量方法分為機內噪聲源法和機外噪聲源法。外接噪聲源和機內噪聲源測量的差值應≤0.2 dB。
選擇機內噪聲源法測試時,可以在雷達測試軟件內完成噪聲系數的測試[3]。選擇機外噪聲源法測試時,需要外接固態噪聲源,目前升級改造后的CINRAD/CD雷達接收機自帶28 V電源,可對外接噪聲源進行供電,其余C波段多普勒天氣雷達可以使用頻譜儀自帶28 V電源對噪聲源進行供電。如果機外噪聲源法測量結果達到技術指標要求,機內噪聲源法測試結果與外接噪聲源法測試結果應不滿足差值小于0.2 dB的指標要求,則需要對雷達系統進行進一步檢查或維修。方法是修改機內噪聲源ENR常數值(即有效超噪比ENR有效),使機內、機外噪聲系數測試結果達到技術指標要求。
2.2 接收機動態范圍
接收系統動態范圍表示接收系統正常工作允許的輸入信號強度范圍,信號太弱,則無法被檢測出來;信號太強,接收機會發生飽和過載。新一代天氣雷達的動態范圍是指瞬時動態范圍,即不含STC(時間靈敏度控制或近程增益控制)的動態范圍。動態特性的測量采用外接信號源或機內測試信號源,信號源輸出信號在接收機低噪聲放大器輸入端注入,在雷達終端監控軟件上自動獲取A/D輸出的功率(單位:dBm)或反射率(單位:dBZ)。改變信號源輸出信號的功率,測量系統的輸入、輸出特性。根據輸入、輸出數據,采用最小二乘法進行擬合,擬合直線斜率為1。由實測曲線與擬合直線對應點的輸出數據差值(≤1.0 dB)來確定接收系統低端下拐點和高端上拐點(飽和點),下拐點和上拐點所對應的輸入信號功率值的差值即為動態范圍。需要注意的是采用機外信號源法時,要準確測量測試電纜的損耗。
3 結束語
C波段多普勒天氣雷達的使用,在歷次氣象災害過程中充分發揮了“千里眼”的作用,為防災減災決策服務提供了有力支撐。做好天氣雷達的定標維護工作,是雷達在重大天氣過程中能夠發揮重要作用的前提。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年9期)2018-08-04 03:31:04
電子制作(2018年11期)2018-08-04 03:25:42
電子制作(2018年12期)2018-08-01 00:48:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25