基于網格化處理與遍歷搜索算法的多波束測深模型
2023-02-02 07:51:22孫德俊鄧宇航朱蘇茜
南通職業大學學報 2023年4期
孫德俊,鄧宇航,朱蘇茜
(南京郵電大學 通信與信息工程學院, 南京 210023)
多波束測深系統是在單波束測深系統基礎上發展起來的,該系統在與航跡垂直的平面內一次能發射出數十個乃至上百個波束,再由換能器接收海底返回的聲波。傳統的單波束測深系統只能獲得測量船垂直下方一個海底深度測量值。多波束測深克服了單波束測深的缺點,在海底平坦的海域內,能測量出以測量船測線為軸線且具有一定寬度的全覆蓋水深條帶。本文基于多波束測深覆蓋寬度模型,對不同情況下多波束測深覆蓋寬度及測線總長度進行研究。
1 問題一模型的建立與求解
問題一[1]設定為二維平面背景,與測線方向垂直的平面和海底坡面的交線構成一條與水平面夾角為a 的斜線。運用幾何知識確定海水深度及覆蓋寬度,計算在海底地形不平坦情況下相鄰條帶的重疊率,建立多波束測深的覆蓋寬度及相鄰條帶之間重疊率的數學模型。
1.1 確定海水深度
在與測線方向垂直的平面中,以海域中心為原點,以遠離坡角方向為正方向,建立一維數軸,單位長度為l0。測線距中心點處的距離為[n1l0,nIl0],ni中i 表示測線編號,i={1,2,3,…,I},I=9。設定海域中心處的測線編號為j,則海域中心處海水深度為Dj,通過測線距中心處的距離可推算該測線處海水深度為
其中,xi為第i 根測線與海域中心測線的距離,α為海面坡度。
1.2 確定覆蓋寬度
運用正弦定理計算多波束覆蓋寬度,可得
其中,Wi,1、Wi,2分別為第i 根測線處靠近坡角與遠離坡角部分的覆蓋寬度,θ 為多波束換能器的開角。Wi是第i 根測線多波束產生的總覆蓋寬度,為Wi,1與Wi,2之和。
1.3 相鄰條帶重疊率
相鄰條帶間的重疊情況如圖1 所示。當海底地形不平坦時,第i 根測線與前一根測線覆蓋條帶在海底坡面上投影的長度為
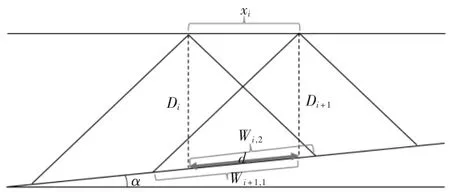
圖1 相鄰條帶重疊示意
第i 根測線與前一根測線條帶的重疊率為
當ηi<0 時,表示漏測。
1.4 問題一模型的求解
已知多波束換能器的開角θ=120°,坡度α=1.5°,海域中心點處海水深度Dj=70 m。測線距中心點處的距離為[-800,800],單位長度為200 m,海域中心處的測線編號為5。利用模型可求解出結果如表1。

表1 問題一模型求解結果
2 問題二模型的建立與求解
問題二設定為三維立體海域背景,測線方向與海底坡面法向量在水平面上投影的夾角為β。建立合適的三維坐標系以表示測量船坐標及測量船在海底坡面上投影點的坐標。根據點法式,由坡面法向量和坡面上一點確定坡面方程,并由坡面與多波束平面相交得到覆蓋線的方向向量,進而計算覆蓋線與水平面的夾角,最終基于問題一的模型求解多波束覆蓋寬度的數學模型。
2.1 確定測量船的坐標
以海域中心點垂直向下與海底坡面的交點為原點,坡面法向量在水平投影方向為x 軸正方向,以垂直于x 軸、水平向右為y 軸正方向,以垂直于水平面、豎直向上為z 軸正方向,建立三維坐標系,如圖2 所示。

圖2 三維坐標系示意
測量船始終在海平面航行,海平面與海域中心豎直距離為D0,因此測量船z 軸坐標始終為D0。設定測量船距海域中心的距離為A,測線方向與海底坡面法向量在水平面上投影的夾角為β,根據測線方向分別在x、y 軸上的投影可得,測量船x、y 軸坐標分別為Acos β、Asin β。
測量船坐標為
2.2 計算坡面法向量坐標
2.3 計算測量船處的海水深度
海底坡面過點(0,0,0),同時坡面法向量為(1,0,cotα),根據平面的點法式方程[2],可求得坡面方程為
測量船在坡面上投影點的坐標為
由測量船投影點坐標可知,測量船處海水深度的計算公式為
2.4 計算測量船覆蓋線與水平面的夾角

圖3 測量船覆蓋線示意
測量船發出多波束產生的覆蓋線同時存在于坡面及多波束所在平面。圖3 中表示多波束產生的覆蓋線方向向量,有
通過坡面法向量和多波束所在平面法向量可以求得
計算得到覆蓋線的方向向量為
將式(18)進行變換,得到夾角γ,
其中,γ∈[0,π/2]。
2.5 計算多波束覆蓋寬度
基于問題一,可得到三維坐標系中覆蓋寬度計算公式,
2.6 問題二模型的求解
若多波束換能器開角θ = 120°,坡度α =1.5°,海域中心點處的海水深度D0=120 m,以測量船距海域中心點處的距離為0.3 海里,測線方向與坡面法向量夾角β=0°時為例,求解多波束覆蓋寬度。船與海域中心的距離A=0.3×1 852=555.6 m,測線方向與坡面法向量夾角β= 0°,由式(19)計算得到覆蓋線與水平面夾角γ = 0°,由式(20)得多波束覆蓋寬度W=466.09 m。同理可換算測量船其余位置距海域中心點處的距離,求解出各位置多波束測深的覆蓋寬度,并進行可視化處理,結果如圖4 所示。

圖4 覆蓋寬度三維示意
3 問題三模型的建立與求解
問題三給定了一個限定邊界的矩形待測海域,要求設計一組測量長度最短并滿足約束條件的測線。首先將待測海域網格化,并分析不同行駛角度下測線的覆蓋效率,再通過算法求解最短測線的總長度。
3.1 矩形海域網格化
將海域長度單位轉換為米,矩形海域南北長3 704 m,東西寬7 408 m。將矩形海域網格化,如圖5 所示。由西向東為x 軸正方向,由南向北為y軸正方向,建立矩形海域水平面坐標系。

圖5 矩形海域網格示意
3.2 確定測線運動方向
當測量船行駛一定距離時,通過多波束測量,可以形成覆蓋線。這些覆蓋線所圍成的形狀似梯形,其面積計算公式為
其中,S覆蓋是行駛過程中測線所圍成的面積,WA是測量船起始位置覆蓋線長度,WB是測量船行駛距離r 后終止位置覆蓋線長度,φ 是測線方向與坡面所形成的線面角。
測量船行駛相同的距離,覆蓋面積越大,測量效率越高,測線覆蓋效率ζ 定義如下:
覆蓋線與水平面形成的線面γ 角計算公式為
測線在海底坡面投影線與水平面形成的線面角φ 計算公式為
聯立式(20)—(24),并代入多波束開角θ =120°,則測線覆蓋效率公式化簡為
因海域坡面坡度不變,海域中心處海水深度穩定,故α 和D0為常值,測線覆蓋效率僅與行駛角度即測線方向與海底坡面法向量在水平面上投影的夾角β 有關。測量船行駛角度與測線覆蓋率函數關系曲線如圖6 所示。
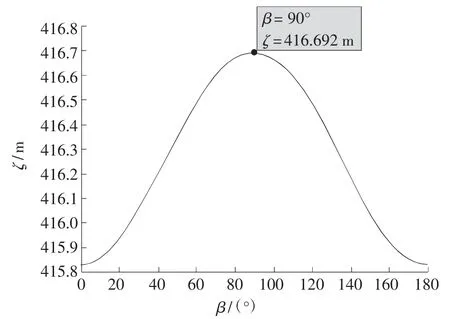
圖6 測量船行駛角度與測線覆蓋效率函數關系曲線
由圖6 可知,當測量船行駛角度為90°時,航行相同的距離,測量船發出多波束所覆蓋的面積最大,測線覆蓋效率最高。
3.3 測線邊界條件
第一根測線的邊界條件為
其中,W1,1表示第1 根測線靠近坡角一側產生的覆蓋寬度;若W1,1<x1/cos α,表明最靠近坡角的測線無法覆蓋坡角所在邊,產生漏測。
其余測線邊界條件為:多波束第i 根測線覆蓋條帶與第i-1 根測線覆蓋條帶的重疊率為
綜合考慮測量效率及覆蓋度,測線產生覆蓋條帶重疊率應為10 %~20 %,即0.1≤ηi≤0.2。
最后一根測線的邊界條件為
其中,WI,2表示第I 根測線(最后一根測線)遠離坡角一側產生的覆蓋寬度;若WI,2<(7 408-xI)/cosα,表明最遠離坡角的測線無法覆蓋坡角所在邊,產生漏測。
綜上,針對問題三的矩形海域建立測線規劃數學模型如下:
3.4 最佳測線間距離求解
根據模型建立結果,測線規劃為南北向直線即β=90°時,矩形海域測線覆蓋效率最高。根據上述模型的邊界條件,可采用遍歷搜索法求解測線間距。測線布設求解結果如圖7 所示。

圖7 問題3 測線布設求解結果
由西到東,海水深度逐漸變小。由圖7 可知,自西向東測線之間的間距逐漸減小,測線越來越密集,同時測線間距下降幅度也逐漸減小。
行駛角度為90°時,共有34 條測線,則總測線長度為L=34×3 704=125 936 m。
4 問題四模型的建立與求解
根據問題三的結論,當測線與等深線平行時,測線覆蓋效率最高。因此,針對該題盡量沿著與等深線平行方向研究并設計測線分布方案。
4.1 克里格插值法補充缺失數據
由于在同一海域中,海水深度具有較強的空間自相關性,因此采用克里格插值法[3]對缺失數據進行補充,原理見圖8。
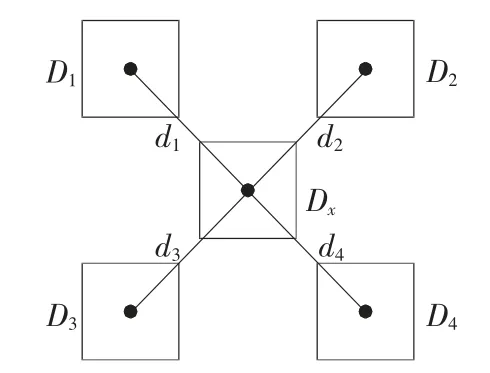
圖8 插值補充缺失數據示意
缺失數據計算公式為
式中,Dx為所求點的海水深度,D1—D4分別為距離所求點最近的已知深度數據,d1—d4為已知點到所求點的距離。
4.2 分析矩形海域海底情況
圖9 為海水深度的等深線。圖9 顯示,該海域西南部分地勢較高,東南部分地勢較低,海域西南至東北方向呈U 型,東南部分的等深線近似平行。
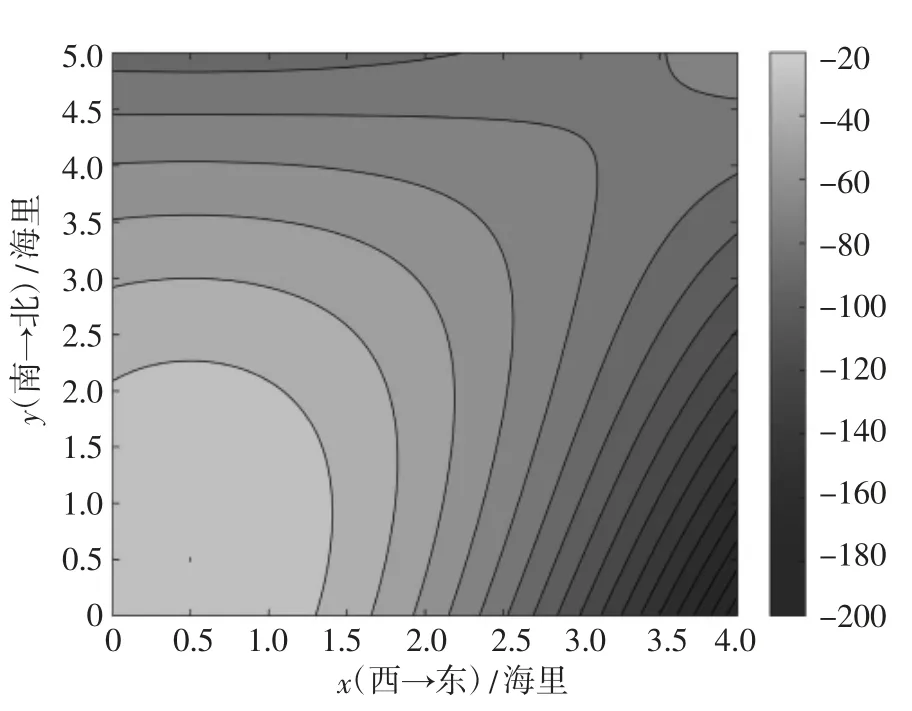
圖9 海水深度等深線
考慮測量效率,測線的方向宜平行于等深線的方向[4]。對于該海域依照等深線分布劃分區域,分別討論劃分區域的測線布設,具體布設如圖10所示。以西南至東北方向的連線作為分界線,為簡化問題,等深線為U 型時,測線為相互垂直的兩條直線。當測線掃描完東北角后,測線布設為相互平行的直線。
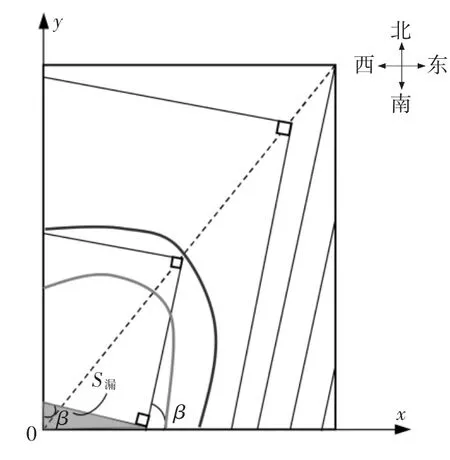
圖10 測線布設示意
基于問題三的模型,當β=90°且測線靠近矩形海域邊緣時,采用遍歷搜索得到起始測線的橫軸坐標為41 m。
4.3 起始測線布設多目標規劃模型建立
目標函數為:
1)測線掃描所形成的條帶盡量覆蓋整個待測海域,即漏測區域面積S漏盡可能小;
2)測量船掃過面積S覆蓋最大;
3)測線盡量沿著海域等深線布設。
約束條件為:
1)起始測線的起點在x 軸上;
3)測線重疊率η 盡量不超過20 %。
綜上,建立研究海域起始測線布設多目標規劃模型為:
其中,Δd 表示移動前后海水深度的變化,Δr 表示測量船行駛的單位距離。
4.4 網格化求解覆蓋寬度
由于海水深度不規律,需要網格化求解覆蓋寬度,幾何關系如圖11 所示。

圖11 網格化求解的幾何關系示意
設船在測線上某一位置的坐標為(x,y),測線行駛角度為β,定義網格大小為Δx,則在多波束上一點的坐標為(xk,yk),
根據克里格插值法,可得某一坐標的海水深度為D(x,y)。設多波束開角θ=120°,當多波束上一點的坐標滿足
即該點剛好落在海底面上,則船在該坐標點的覆蓋寬度為
4.5 問題四模型求解
測線布設如圖12 所示,其中黑實線為測線航跡,虛線下方為漏測寬度,上方為可覆蓋寬度。由圖12 可知,漏測面積近似為三角形面積。

圖12 問題四測線布設
1)測線最佳偏移角度求解
根據上述測線布設方案,建立多目標規劃模型,計算測線偏移不同角度時的單位海洋深度差來衡量測線布設與海洋等深線的契合度。當起始位置為(41,0),測線與x 軸偏移角度為74°時,單位距離的海洋深度差最小,即與海洋等深線最接近。
2)測線間距求解
在得到最佳起始位置和偏移角度后,為使總測線長度最小,各測線在滿足重疊率的要求下,要使測線間距最大。沿用問題三的求解模型,設定搜索步長為Δl=5 m。
將得到的測線間距帶入網格化處理模型,可計算得相關指標結果如表2。
由表2 可知,重疊率超過20 %的測線長度占比較高,而漏測海區占待測海域總面積的比例較低。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48