基于隨機(jī)空間網(wǎng)絡(luò)的無(wú)人機(jī)集群協(xié)同對(duì)抗模型
2023-02-09 08:34:44王爾申郭靖宏晨任虹帆陳艾東商新娜
北京航空航天大學(xué)學(xué)報(bào) 2023年1期
王爾申,郭靖,宏晨,任虹帆,陳艾東,商新娜
(1. 沈陽(yáng)航空航天大學(xué) 電子信息工程學(xué)院,沈陽(yáng) 110136; 2. 沈陽(yáng)航空航天大學(xué) 遼寧通用航空研究院,沈陽(yáng) 110136;3. 北京聯(lián)合大學(xué) 北京市信息服務(wù)工程重點(diǎn)實(shí)驗(yàn)室,北京 100101; 4. 北京聯(lián)合大學(xué) 機(jī)器人學(xué)院,北京 100101)
目前,無(wú)人機(jī)在戰(zhàn)場(chǎng)中發(fā)揮越來(lái)越重要的作用。無(wú)人機(jī)正在重新定義戰(zhàn)爭(zhēng)。無(wú)人機(jī)集群以難防御、強(qiáng)進(jìn)攻、低成本、協(xié)同對(duì)抗、使用靈活等優(yōu)勢(shì)越來(lái)越受到重視[1]。Grassé[2]通過(guò)研究蟲(chóng)群的群體行為,最早提出了“集群”的概念。無(wú)人機(jī)集群可以模仿生物集群行為,通過(guò)無(wú)人機(jī)間的信息傳遞與協(xié)同,能在各種復(fù)雜險(xiǎn)惡的環(huán)境下完成多樣性任務(wù)。無(wú)人機(jī)集群技術(shù)將成為一項(xiàng)足以改變戰(zhàn)爭(zhēng)模式和戰(zhàn)爭(zhēng)規(guī)則的顛覆性技術(shù)。
無(wú)人機(jī)集群技術(shù)已成為主要軍事強(qiáng)國(guó)角逐的熱點(diǎn)。在無(wú)人機(jī)集群協(xié)同方面,文獻(xiàn)[3]將博弈論應(yīng)用于多智能體協(xié)同合作問(wèn)題,設(shè)計(jì)了一個(gè)分布式優(yōu)化算法。文獻(xiàn)[4]針對(duì)未知空域中的無(wú)人機(jī)路徑規(guī)劃問(wèn)題研究了基于遺傳算法的操作條件概率自動(dòng)機(jī)(genetic algorithm-operant conditioning probabilistic automaton, GA-OCPA)學(xué)習(xí)系統(tǒng)。文獻(xiàn)[5]通過(guò)對(duì)無(wú)人機(jī)歷史搜索信息、節(jié)點(diǎn)重要性和運(yùn)動(dòng)學(xué)約束等條件的綜合分析完成無(wú)人機(jī)運(yùn)動(dòng)規(guī)劃。文獻(xiàn)[6]研究了一種無(wú)人機(jī)在線協(xié)同航跡規(guī)劃方法,可以快速生成符合協(xié)同時(shí)序要求的協(xié)同航跡。文獻(xiàn)[7]研究了基于耦合度的啟發(fā)式優(yōu)先規(guī)劃方法(couplingdegree-based heuristic prioritized planning, CDH-PP),提高了無(wú)人機(jī)集群協(xié)同路徑生成的效率和魯棒性。文獻(xiàn)[8]針對(duì)已知地形下的無(wú)人機(jī)集群避撞問(wèn)題,研究了一種多目標(biāo)最優(yōu)路徑分配算法。文獻(xiàn)[9]研究了一種基于Lyapunov 穩(wěn)定性理論的無(wú)人機(jī)規(guī)避或跟蹤目標(biāo)運(yùn)動(dòng)導(dǎo)引方法。文獻(xiàn)[10]針對(duì)無(wú)人機(jī)集群偵察任務(wù)研究基于離散粒子群優(yōu)化(discrete particle swarm optimization, DPSO)的路徑規(guī)劃算法。文獻(xiàn)[11]針對(duì)無(wú)人機(jī)集群網(wǎng)絡(luò)協(xié)同通信的節(jié)點(diǎn)布局問(wèn)題,研究了多跳優(yōu)先隊(duì)列方法,引入強(qiáng)化學(xué)習(xí)得到了基于深度Q 學(xué)習(xí)(deep Q-learing,DQN)的無(wú)人機(jī)網(wǎng)絡(luò)鏈路優(yōu)化模型。文獻(xiàn)[12]針對(duì)無(wú)人機(jī)集群網(wǎng)絡(luò)的協(xié)同通信問(wèn)題,研究了自適應(yīng)多集群leaderfollower 的協(xié)同優(yōu)化模型。
在無(wú)人機(jī)集群對(duì)抗方面,文獻(xiàn)[13]提出了基于博弈論的面向多無(wú)人機(jī)追逃的最優(yōu)機(jī)動(dòng)決策算法。文獻(xiàn)[14]采用兩步裁定法模擬無(wú)人機(jī)雙方對(duì)戰(zhàn),并利用文化基因算法模擬目標(biāo)匹配,實(shí)現(xiàn)了超視距無(wú)人機(jī)目標(biāo)對(duì)抗。文獻(xiàn)[15]在單無(wú)人機(jī)有限控制算法的基礎(chǔ)上,提出了一種多無(wú)人機(jī)自主控制算法,以提高無(wú)人機(jī)集群在對(duì)抗中的成功率。文獻(xiàn)[16]利用蜂群算法提出了一套完整的無(wú)人機(jī)集群協(xié)同對(duì)抗軟件體系架構(gòu)。文獻(xiàn)[17]針對(duì)不同機(jī)動(dòng)能力的無(wú)人機(jī)群體的攻防對(duì)抗,提出了基于強(qiáng)化學(xué)習(xí)的多無(wú)人機(jī)強(qiáng)化學(xué)習(xí)方法,無(wú)人機(jī)可通過(guò)自主學(xué)習(xí)提升協(xié)同對(duì)抗決策效能。
無(wú)人機(jī)集群協(xié)同對(duì)抗是一個(gè)高維度、強(qiáng)動(dòng)態(tài)的非線性復(fù)雜系統(tǒng)。復(fù)雜網(wǎng)絡(luò)是研究復(fù)雜系統(tǒng)的有力工具。復(fù)雜空間網(wǎng)絡(luò)指節(jié)點(diǎn)位于具有度量的空間中,是受一定幾何形狀限制的嵌入到空間中的網(wǎng)絡(luò)[18]。空間網(wǎng)絡(luò)中的節(jié)點(diǎn)具有空間位置屬性,邊具有空間距離屬性。隨機(jī)空間網(wǎng)絡(luò)是指網(wǎng)絡(luò)中節(jié)點(diǎn)被隨機(jī)生成在一個(gè)空間坐標(biāo)位置,節(jié)點(diǎn)間的空間距離也是隨機(jī)生成的[19]。
現(xiàn)有的無(wú)人機(jī)集群模型大多基于群體內(nèi)部協(xié)同[5-7],大規(guī)模無(wú)人機(jī)集群協(xié)同對(duì)抗的模型相對(duì)較少。使用隨機(jī)空間網(wǎng)絡(luò)模擬無(wú)人機(jī)集群對(duì)抗場(chǎng)景,可以充分利用現(xiàn)有的復(fù)雜網(wǎng)絡(luò)理論,具有算法簡(jiǎn)單、空間布局靈活、戰(zhàn)場(chǎng)初始態(tài)勢(shì)隨機(jī)、更接近于多無(wú)人機(jī)混戰(zhàn)場(chǎng)景等優(yōu)點(diǎn)。本文將隨機(jī)空間網(wǎng)絡(luò)引入到無(wú)人機(jī)集群協(xié)同對(duì)抗場(chǎng)景中,將對(duì)抗的無(wú)人機(jī)集群區(qū)分為紅藍(lán)雙方,每架無(wú)人機(jī)為網(wǎng)絡(luò)中的一個(gè)節(jié)點(diǎn),無(wú)人機(jī)間的協(xié)同對(duì)抗關(guān)系抽象為網(wǎng)絡(luò)中的邊,邊的長(zhǎng)度代表無(wú)人機(jī)間的空間距離,構(gòu)建無(wú)人機(jī)集群協(xié)同對(duì)抗 網(wǎng) 絡(luò)(cooperative confrontation networks of UAVs,CCN-UAVs),基于網(wǎng)絡(luò)級(jí)聯(lián)效應(yīng)分析無(wú)人機(jī)集群協(xié)同網(wǎng)絡(luò)的魯棒性,并通過(guò)仿真驗(yàn)證無(wú)人機(jī)集群協(xié)同對(duì)抗模型的有效性。
1 作戰(zhàn)場(chǎng)景與網(wǎng)絡(luò)模型
1.1 作戰(zhàn)場(chǎng)景
藍(lán)方無(wú)人機(jī)為察打一體型無(wú)人機(jī),任務(wù)為協(xié)同偵察,主要探測(cè)敵方防御情況與偵察敵方地面部隊(duì),需要將偵察得到的大量信息帶回基地。紅方無(wú)人機(jī)為打擊型無(wú)人機(jī),任務(wù)為巡視是否有敵方潛入,并在發(fā)現(xiàn)敵軍后進(jìn)行攻擊。紅藍(lán)無(wú)人機(jī)集群對(duì)抗場(chǎng)景如圖1 所示。
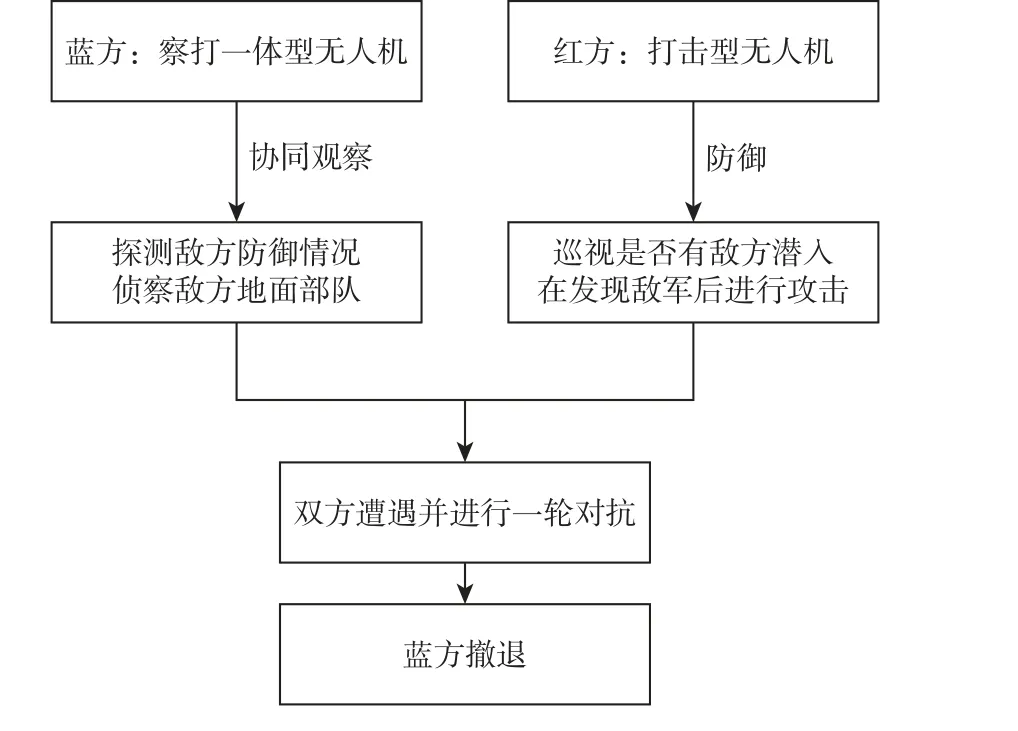
圖1 對(duì)抗場(chǎng)景示意圖Fig. 1 Diagram of confrontation scenario
隨機(jī)空間網(wǎng)絡(luò)具有2 個(gè)重要參數(shù):空間維度和空間中節(jié)點(diǎn)的距離閾值。初始時(shí),n個(gè)節(jié)點(diǎn)被隨機(jī)生成在一個(gè)可設(shè)定維度的空間中,同時(shí)可根據(jù)需要設(shè)定節(jié)點(diǎn)的位置與分布方式。如果d(u,v)≤R,則節(jié)點(diǎn)u與 節(jié)點(diǎn)v之間將存在連邊。其中,d為2 個(gè)節(jié)點(diǎn)之間的歐氏距離,R為節(jié)點(diǎn)間的距離閾值。
在二維空間與三維空間中,分別采用全連接方式構(gòu)建紅藍(lán)雙方的無(wú)人機(jī)集群協(xié)同對(duì)抗網(wǎng)絡(luò)。網(wǎng)絡(luò)中的每個(gè)節(jié)點(diǎn)視為無(wú)人機(jī),一定空間距離內(nèi)的無(wú)人機(jī)間存在連邊表示其協(xié)同或?qū)龟P(guān)系,互為友機(jī)間的連邊為協(xié)同關(guān)系,互為敵機(jī)間的連邊為對(duì)抗關(guān)系;設(shè)定網(wǎng)絡(luò)總節(jié)點(diǎn)數(shù)為n,在空間中節(jié)點(diǎn)位置分布服從X~N(0,4)高斯分布,各節(jié)點(diǎn)屬性隨機(jī)分配,紅藍(lán)雙方節(jié)點(diǎn)數(shù)均為n/2,得到紅藍(lán)雙方無(wú)人機(jī)集群協(xié)同對(duì)抗網(wǎng)絡(luò)CCN-UAVs;將藍(lán)方節(jié)點(diǎn)組成的網(wǎng)絡(luò)單獨(dú)提取出來(lái)并保存,此網(wǎng)絡(luò)為藍(lán)方無(wú)人機(jī)集群協(xié)同網(wǎng)絡(luò)(cooperative network of UAVs, CN-UAVs);將紅藍(lán)雙方無(wú)人機(jī)集群協(xié)同對(duì)抗網(wǎng)絡(luò)中所有互為友機(jī)間的連邊(即相同顏色節(jié)點(diǎn)之間的連邊)刪除,構(gòu)成紅藍(lán)雙方無(wú)人機(jī)集群對(duì)抗網(wǎng)絡(luò)。以10 個(gè)節(jié)點(diǎn)為例展示了構(gòu)建紅藍(lán)雙方無(wú)人機(jī)集群網(wǎng)絡(luò)的過(guò)程,如圖2 所示,藍(lán)方節(jié)點(diǎn)用藍(lán)色實(shí)心點(diǎn)表示,紅方節(jié)點(diǎn)用紅色空心點(diǎn)表示。

圖2 網(wǎng)絡(luò)結(jié)構(gòu)Fig. 2 Network structure
考慮雙方的殺傷率受空間距離的影響,2 個(gè)對(duì)抗無(wú)人機(jī)的空間距離越大,殺傷率就越低。引入衰減因子 γ,其表達(dá)式為
1.2 協(xié)同對(duì)抗網(wǎng)絡(luò)模型
1.3 殺傷率的衰減
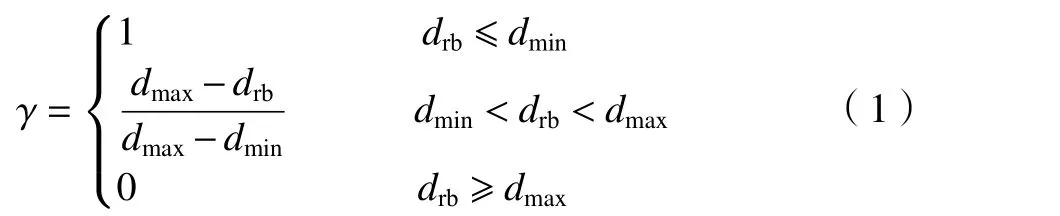
式中:dmax為網(wǎng)絡(luò)中對(duì)抗節(jié)點(diǎn)的空間距離閾值,超過(guò)該距離將不再對(duì)攻;drb為2 個(gè)對(duì)抗無(wú)人機(jī)的實(shí)際空間距離;dmin為無(wú)殺傷率衰減的最小空間距離。
雙方對(duì)抗過(guò)程中的真實(shí)殺傷率rreal為

式中:r為無(wú)衰減的初始?xì)省?/p>
可 以 看 出,drb=dmin時(shí) , γ=1,即 不 衰 減。當(dāng)drb=dmax時(shí) , γ=0,2 個(gè)無(wú)人機(jī)將無(wú)法殺傷對(duì)方。
1.4 網(wǎng)絡(luò)魯棒性評(píng)價(jià)指標(biāo)
魯棒性[20-21]是復(fù)雜網(wǎng)絡(luò)的一項(xiàng)重要特征,指網(wǎng)絡(luò)在受到外界攻擊或內(nèi)部結(jié)構(gòu)由于某種原因發(fā)生變化時(shí),還可以保持其功能的能力。如果網(wǎng)絡(luò)中的部分節(jié)點(diǎn)(邊)被移除后,該網(wǎng)絡(luò)中的大部分節(jié)點(diǎn)(邊)仍然可以保持正常功能,則稱(chēng)這個(gè)網(wǎng)絡(luò)是魯棒的。復(fù)雜網(wǎng)絡(luò)的級(jí)聯(lián)效應(yīng)是指網(wǎng)絡(luò)中一個(gè)或者少數(shù)幾個(gè)節(jié)點(diǎn)或邊的失效會(huì)通過(guò)節(jié)點(diǎn)之間的耦合關(guān)系引發(fā)其他節(jié)點(diǎn)也發(fā)生失效,進(jìn)而產(chǎn)生連鎖反應(yīng),導(dǎo)致網(wǎng)絡(luò)中相當(dāng)一部分節(jié)點(diǎn)甚至整個(gè)網(wǎng)絡(luò)的崩潰[22]。
為了分析藍(lán)方CN-UAVs 的魯棒性,引入無(wú)人機(jī)數(shù)據(jù)攜帶量與數(shù)據(jù)容量上限參數(shù),通過(guò)被擊落無(wú)人機(jī)在墜毀前的數(shù)據(jù)分配過(guò)程來(lái)觸發(fā)網(wǎng)絡(luò)的級(jí)聯(lián)效應(yīng)。使用網(wǎng)絡(luò)失效大小作為評(píng)價(jià)藍(lán)方CN-UAVs魯棒性的指標(biāo),其中網(wǎng)絡(luò)失效大小S定義為

式中:N′為 藍(lán)方CN-UAVs 中當(dāng)前剩余節(jié)點(diǎn)數(shù);N為初始藍(lán)方CN-UAVs 總節(jié)點(diǎn)數(shù)。
仿真開(kāi)始時(shí),設(shè)置雙方無(wú)人機(jī)各自的能力參數(shù)并分配任務(wù)殺傷率;對(duì)抗過(guò)程中,設(shè)置每架無(wú)人機(jī)選擇單個(gè)敵機(jī)進(jìn)行對(duì)抗,對(duì)抗結(jié)束后,藍(lán)方無(wú)人機(jī)撤離,記錄被擊落的無(wú)人機(jī);在對(duì)抗結(jié)束后,觀察藍(lán)方無(wú)人機(jī)集群對(duì)探測(cè)數(shù)據(jù)的分配及因被分配超出可容量(可容量指數(shù)據(jù)容限減自身數(shù)據(jù)攜帶量)的數(shù)據(jù)而觸發(fā)的級(jí)聯(lián)效應(yīng)。計(jì)算藍(lán)方CN-UAVs 失效大小S。總體步驟如下:
步驟1 基于隨機(jī)空間網(wǎng)絡(luò)構(gòu)建紅藍(lán)雙方的CN-UAVs。
步驟2 雙方進(jìn)行對(duì)抗,被擊落的藍(lán)方無(wú)人機(jī)在墜毀前分配探測(cè)數(shù)據(jù)。
步驟3 在藍(lán)方CN-UAVs 中尋找是否有被分配數(shù)據(jù)量超出其可容量的無(wú)人機(jī),若存在,則該部分無(wú)人機(jī)將因?yàn)闈M載而在網(wǎng)絡(luò)中被視為失效,并將其被分配的超出可容量的數(shù)據(jù)平均分配給其他相鄰友機(jī)。
步驟4 重復(fù)步驟3,直至藍(lán)方CN-UAVs 中不存在被分配超出可容量數(shù)據(jù)的無(wú)人機(jī)或全部無(wú)人機(jī)失效,計(jì)算藍(lán)方CN-UAVs 失效大小,整個(gè)過(guò)程結(jié)束。
2 仿真結(jié)果
在仿真實(shí)驗(yàn)中,設(shè)定整體空間足夠大,總節(jié)點(diǎn)數(shù)設(shè)置為100,其中50 個(gè)節(jié)點(diǎn)為紅方無(wú)人機(jī),另外50 個(gè)節(jié)點(diǎn)為藍(lán)方無(wú)人機(jī);藍(lán)方每架無(wú)人機(jī)初始執(zhí)行協(xié)同偵察任務(wù)探測(cè)到的數(shù)據(jù)量為5;時(shí)間步從第10 步開(kāi)始,第11 步為雙方無(wú)人機(jī)對(duì)抗過(guò)程,第12步及之后為因數(shù)據(jù)容限所觸發(fā)的級(jí)聯(lián)效應(yīng)過(guò)程。
2.1 二維空間下仿真結(jié)果
在二維空間中,不考慮殺傷率衰減,真實(shí)殺傷率為設(shè)定值,以藍(lán)方CN-UAVs 為主體,繪制紅方無(wú)人機(jī)具備不同殺傷率的情況下,時(shí)間步t和藍(lán)方網(wǎng)絡(luò)失效大小S的關(guān)系,如圖3 所示。設(shè)置藍(lán)方無(wú)人機(jī)數(shù)據(jù)容量上限為7,紅方無(wú)人機(jī)殺傷率分別為0.2、0.4、0.6、0.8。圖中結(jié)果為200 次獨(dú)立實(shí)驗(yàn)取得的平均值,誤差棒表示標(biāo)準(zhǔn)差。
由圖3 可以明顯看出,紅方無(wú)人機(jī)的殺傷率越高,藍(lán)方在第11 時(shí)間步時(shí)被擊落的無(wú)人機(jī)數(shù)量越多,且后續(xù)觸發(fā)的級(jí)聯(lián)效應(yīng)越強(qiáng),即成功帶回基地的數(shù)據(jù)越少。因此,針對(duì)紅方CN-UAVs 來(lái)說(shuō),若要盡可能多得攔截?cái)撤綗o(wú)人機(jī),阻止敵方將數(shù)據(jù)帶回,則應(yīng)盡力提高攻擊的殺傷率。
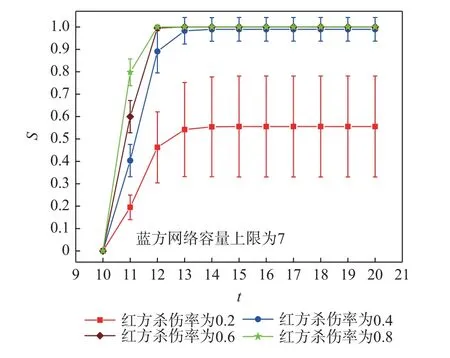
圖3 二維空間中不同紅方殺傷率下網(wǎng)絡(luò)失效大小與時(shí)間步的關(guān)系Fig. 3 Relationship between failed size and time step underdifferent hit rates of red UAVs in 2D
無(wú)人機(jī)具備的數(shù)據(jù)容量上限是觸發(fā)級(jí)聯(lián)效應(yīng)的根源,藍(lán)方無(wú)人機(jī)為確保將更多數(shù)據(jù)帶回基地,其在墜毀前會(huì)將自身攜帶的全部數(shù)據(jù)平均分配給相鄰友機(jī),正因?yàn)榇诉^(guò)程,一部分無(wú)人機(jī)可能會(huì)被分配到超出其可容量的數(shù)據(jù),這部分無(wú)人機(jī)將因滿載而在網(wǎng)絡(luò)中被視為失效。為了探尋無(wú)人機(jī)數(shù)量容限對(duì)此過(guò)程的影響,繪制了藍(lán)方網(wǎng)絡(luò)失效大小S和 時(shí)間步t的關(guān)系,如圖4 所示。設(shè)置紅方無(wú)人機(jī)殺傷率為0.5,藍(lán)方無(wú)人機(jī)數(shù)據(jù)容量上限分別為6、8、10、12、16。仿真結(jié)果為200 次獨(dú)立實(shí)驗(yàn)取得的平均值,誤差棒表示標(biāo)準(zhǔn)差。
當(dāng)容量上限達(dá)到一定值時(shí)(圖4 中容量上限為16,為容量上限臨界值,即容量上限16 的網(wǎng)絡(luò)失效大小S基本不變),對(duì)抗后的級(jí)聯(lián)效應(yīng)基本不會(huì)再使藍(lán)方CN-UAVs 失效大小S發(fā)生改變。因此,針對(duì)藍(lán)方CN-UAVs 來(lái)說(shuō),應(yīng)盡力提高數(shù)據(jù)容量上限直至達(dá)到臨界值,這樣既可以將更多的數(shù)據(jù)安全帶回基地,也可節(jié)約成本。
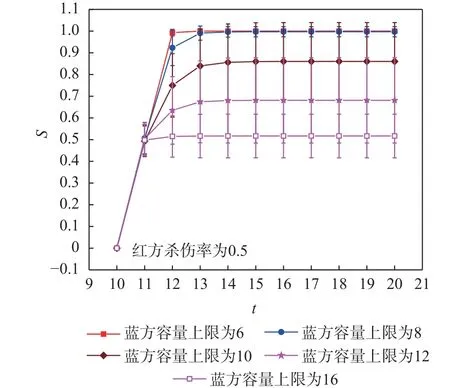
圖4 二維空間中不同藍(lán)方容量上限下網(wǎng)絡(luò)失效大小與時(shí)間步的關(guān)系Fig. 4 Relationship between failed size and time step under different capacity-limitation of blue UAVs in 2D
2.2 三維空間下仿真結(jié)果
在三維空間中考慮殺傷率衰減,設(shè)定空間距離閾值dmax=3, 無(wú)殺傷率衰減的空間距離dmin=0.5。以藍(lán)方CN-UAVs 為主體,同樣從紅方殺傷率改變和藍(lán)方容量上限改變2 個(gè)方面進(jìn)行研究。首先,考慮紅方殺傷率改變的情況,通過(guò)比較二維和三維場(chǎng)景下的級(jí)聯(lián)效應(yīng)(見(jiàn)表1 和圖5),2 種情況下藍(lán)方無(wú)人機(jī)容量上限相同,所得數(shù)據(jù)為25 次獨(dú)立實(shí)驗(yàn)的平均值。可以發(fā)現(xiàn),紅方殺傷率相同的情況下,三維場(chǎng)景在對(duì)抗過(guò)程中被擊落的無(wú)人機(jī)架數(shù)明顯減少,并且后續(xù)觸發(fā)的級(jí)聯(lián)效應(yīng)也相應(yīng)減弱。
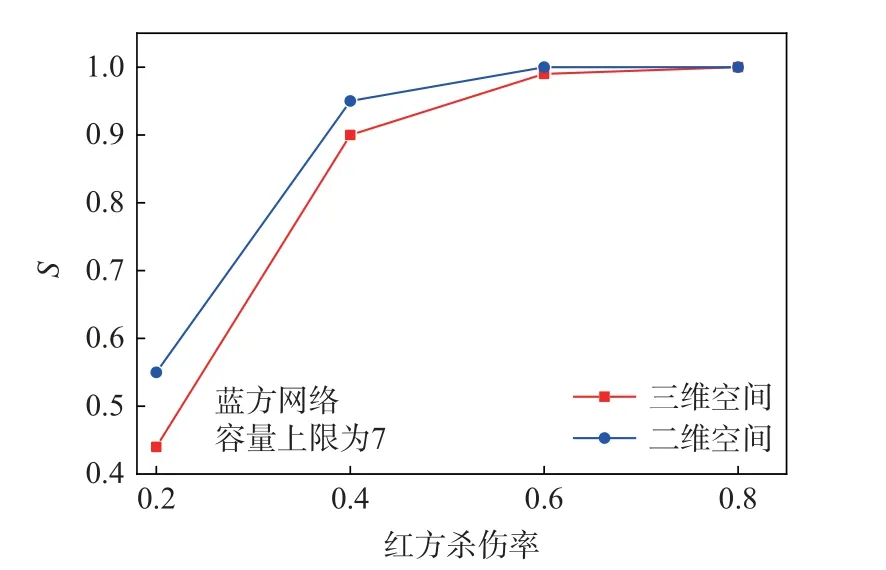
圖5 二維與三維空間中不同紅方殺傷率下網(wǎng)絡(luò)失效大小對(duì)比Fig. 5 Comparison of failed size under different hit rates of red UAVs in 2D and 3D
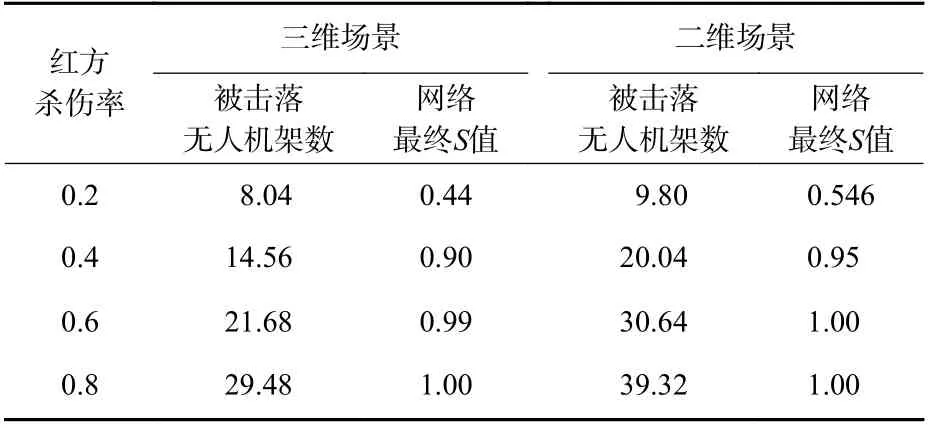
表1 不同紅方殺傷率下的級(jí)聯(lián)效果Table 1 Cascading effects under different hit rates of red UAVs
圖6 繪制了紅方無(wú)人機(jī)具備不同殺傷率的情況下,時(shí)間步t和藍(lán)方網(wǎng)絡(luò)失效大小S的關(guān)系。設(shè)置藍(lán)方無(wú)人機(jī)數(shù)據(jù)容量上限為7,紅方無(wú)人機(jī)殺傷率分別為0.2、0.4、0.6、0.8,圖中結(jié)果為100 次獨(dú)立實(shí)驗(yàn)的平均值,誤差棒表示標(biāo)準(zhǔn)差。通過(guò)與圖3 對(duì)比,結(jié)果顯示,二維場(chǎng)景與三維場(chǎng)景的級(jí)聯(lián)效應(yīng)變化規(guī)律基本一致,即紅方殺傷率越高,藍(lán)方在對(duì)抗過(guò)程中被擊落無(wú)人機(jī)數(shù)量越多,且后續(xù)觸發(fā)的級(jí)聯(lián)效應(yīng)更強(qiáng)。但無(wú)論殺傷率為多少,藍(lán)方被擊落無(wú)人機(jī)架數(shù)都比同等條件下二維空間中少,且觸發(fā)的級(jí)聯(lián)效應(yīng)相應(yīng)減弱。
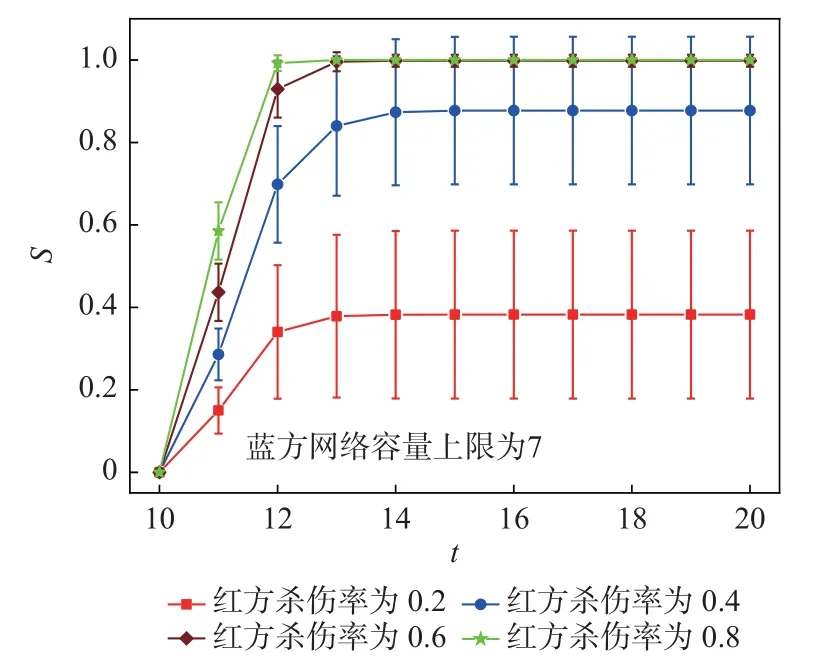
圖6 三維空間中不同紅方殺傷率下網(wǎng)絡(luò)失效大小與時(shí)間步的關(guān)系Fig. 6 Relationship between failed size and time step under different hit rates of red UAVs in 3D
考慮藍(lán)方容量上限改變的情況,圖7 繪制了藍(lán)方無(wú)人機(jī)在具備不同容量上限的情況下,時(shí)間步t和藍(lán)方網(wǎng)絡(luò)失效大小S的關(guān)系。設(shè)置紅方無(wú)人機(jī)殺傷率為0.5,藍(lán)方無(wú)人機(jī)數(shù)據(jù)容量上限分別為6、8、10、12。實(shí)驗(yàn)結(jié)果為200 次獨(dú)立實(shí)驗(yàn)的平均值,誤差棒表示標(biāo)準(zhǔn)差。圖7 中,藍(lán)方無(wú)人機(jī)數(shù)據(jù)容量上限越大,所觸發(fā)的級(jí)聯(lián)效應(yīng)越弱,數(shù)據(jù)容量上限臨界值得到了降低,并且容量上限為12 時(shí)級(jí)聯(lián)效應(yīng)趨于穩(wěn)定。
同樣對(duì)二維場(chǎng)景和三維場(chǎng)景的結(jié)果進(jìn)行比較(見(jiàn)表2 和圖8),2 種情況下紅方無(wú)人機(jī)殺傷率相同,所得數(shù)據(jù)為25 次獨(dú)立實(shí)驗(yàn)取得的平均值。結(jié)果顯示,藍(lán)方容量上限相同時(shí),三維場(chǎng)景比二維場(chǎng)景在被擊落無(wú)人機(jī)數(shù)量、級(jí)聯(lián)效應(yīng)及容量上限臨界值等數(shù)值上均有所降低。例如,二維場(chǎng)景下容量上限臨界值為16(見(jiàn)圖4),三維場(chǎng)景下容量上限臨界值為12(見(jiàn)圖7)。
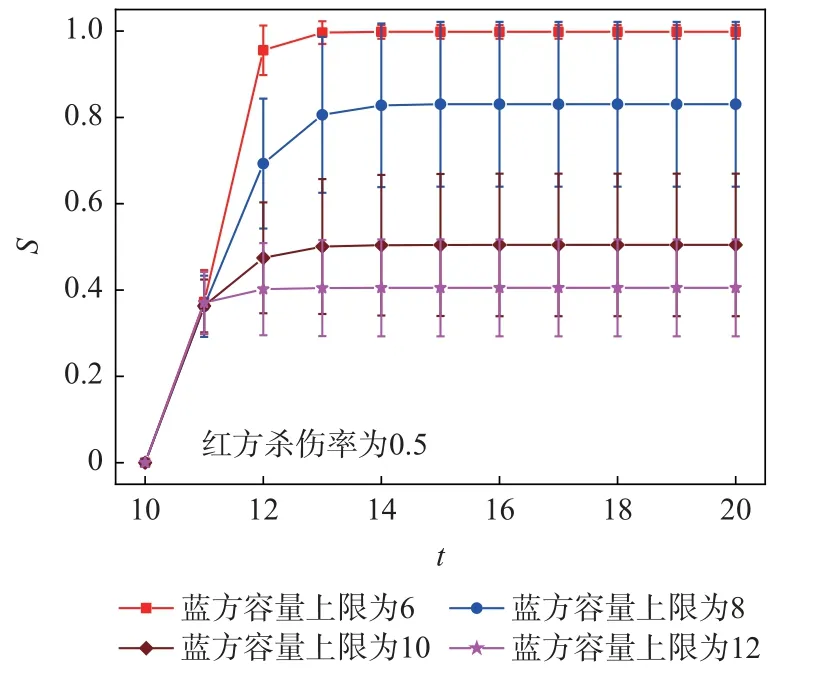
圖7 三維空間中不同藍(lán)方容量上限下網(wǎng)絡(luò)失效大小與時(shí)間步的關(guān)系Fig. 7 Relationship between failed size and time step under different capacity-limitation of blue UAVs in 3D
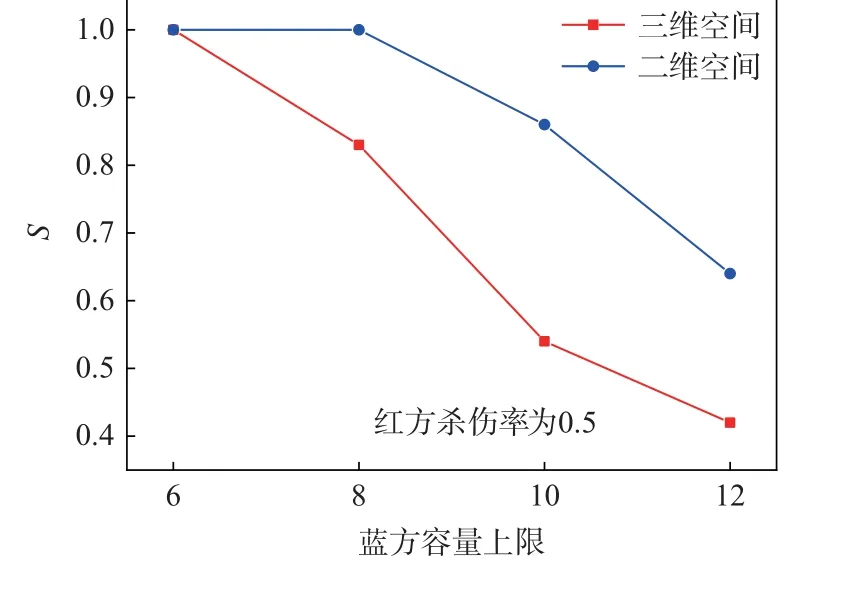
圖8 二維與三維空間中不同藍(lán)方容量上限下網(wǎng)絡(luò)失效大小對(duì)比Fig. 8 Comparison of failed size under different capacitylimitation of blue UAVs in 2D and 3D
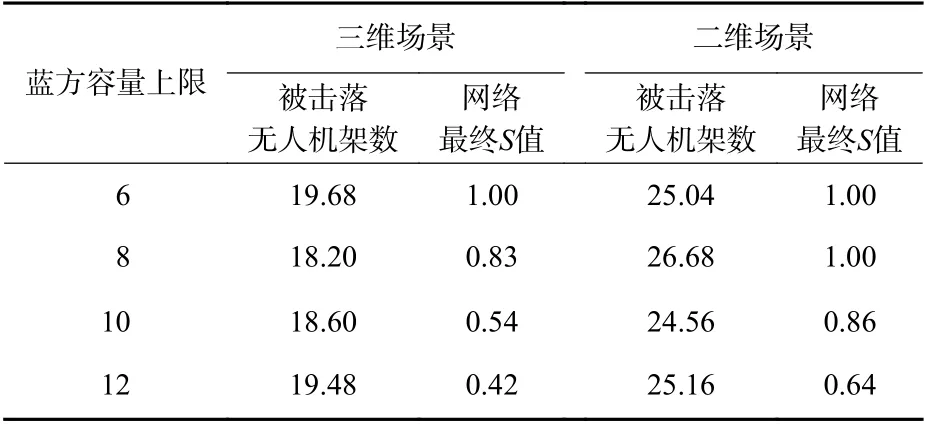
表2 不同藍(lán)方容量上限下的級(jí)聯(lián)效果Table 2 Cascading effects under different capacity-limitation of blue UAVs
3 結(jié) 論
本文基于復(fù)雜網(wǎng)絡(luò)理論,構(gòu)建了紅藍(lán)對(duì)抗場(chǎng)景及無(wú)人機(jī)集群協(xié)同對(duì)抗網(wǎng)絡(luò)模型,研究在二維、三維場(chǎng)景下的網(wǎng)絡(luò)魯棒性及級(jí)聯(lián)效應(yīng)的影響。二維與三維對(duì)抗場(chǎng)景的研究結(jié)果表明:
1) 藍(lán)方容量上限值越大,級(jí)聯(lián)效應(yīng)越弱,網(wǎng)絡(luò)魯棒性越強(qiáng)。
2) 初始?xì)氏嗤瑫r(shí),三維場(chǎng)景中殺傷率的衰減使得藍(lán)方網(wǎng)絡(luò)產(chǎn)生的級(jí)聯(lián)效應(yīng)更弱,網(wǎng)絡(luò)魯棒性更強(qiáng)。