采用電磁導航技術的手術機器人應用研究
2023-02-12 15:13:02石運永林力吳文波
中國醫療器械雜志 2023年1期
【作 者】 石運永,林力,吳文波
上海盼研機器人科技有限公司,上海市,201318
0 引言
在骨科手術中,常見的手術操作有鉆孔、磨削、截骨等手術操作,如何保證醫生在術中實現這些精準操作是當前迫切需要解決的問題。隨著機器人技術和計算機圖形學技術的進步,越來越多的手術機器人被應用到臨床當中,以解決手術視野差、手術精度低和對醫生臨床經驗要求高等問題[1-4]。
現在市場上開發了多款手術機器人系統,比如北京天智航醫療科技股份有限公司的天璣骨科手術機器人系統、北京柏惠維康科技股份有限公司的神經外科手術導航定位系統。臨床研究表明,通過使用手術機器人系統可以保證手術的定位精度,通過術前的手術方案設計可以有效避免人工操作對神經和組織的損傷[5-6]。從其技術實現方式上可以看出,由于腿部、頸椎等骨科手術和神經外科手術的手術視野比較開放,因此在導航系統上都是使用光學導航系統來進行定位的。而對于一些手術視野較差、神經和血管較豐富的區域,手術時采用光學導航則會帶來光學遮擋導致手術精度低的問題,比如顱面骨手術、肺部活檢穿刺等手術。因此該術種可以利用電磁導航定位系統不怕遮擋、體積小、傳感器體積小的優勢來進行工具的導航定位,輔助醫生實現精準的手術操作。
在顱面截骨手術時,目前一般采用口內切口的方式,但由于顱面結構復雜、神經和血管分布廣泛、手術視野差等原因,醫生在手術時不能完全看到下頜骨的形狀以及手術工具相對下頜骨的位置,很難按計劃進行精確的截骨操作,從而導致截骨雙側不對稱,術后效果不理想。即使是經驗豐富的醫生做手術時也難以保證安全與精確,對年輕的醫生則是更大的挑戰。如何給醫生指出明確的截骨路徑并輔助其在狹小空間內精準定位成了截骨手術迫切需要解決的問題。我們以顱面手術為研究對象,重點論述了電磁導航定位的骨科手術機器人的關鍵技術及解決方案,并通過模型試驗對系統功能進行了驗證[7-9]。
1 電磁導航手術機器人系統
1.1 系統介紹
系統主要由硬件和軟件兩部分組成,圖1為電磁導航手術機器人系統結構。圖2為電磁導航手術機器人示意。
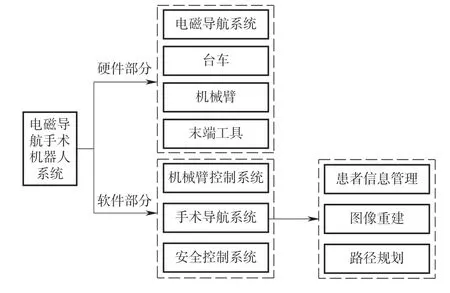
圖1 電磁導航手術機器人系統結構Fig.1 Structure of the electromagnetic navigation robotic surgical system
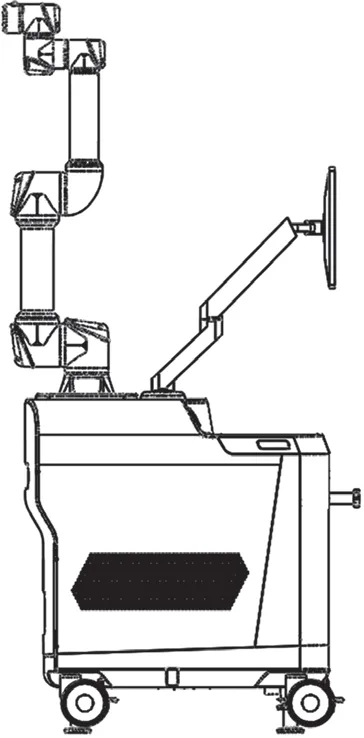
圖2 電磁導航手術機器人示意Fig.2 Diagram of the electromagnetic navigation surgical robot
系統的配準就是將不同單元的坐標系進行統一,系統的坐標系分別為:機器人基坐標系、圖像坐標系、磁場坐標系和工具坐標系。磁場發生器與患者影像之間的位置關系矩陣為:

式中:pe為磁場發生器的位姿;pi為醫學圖像的位姿;為圖像和磁場發生器之間的轉換矩陣。
機器人末端執行工具與磁場發生器之間的位置關系矩陣為:

式中:pt為機器人末端工具的位姿信息;pe為磁場發生器的位姿;為磁場發生器與機械臂末端工具之間的轉換矩陣。
機械臂基座和末端工具之間的位置關系矩陣為:

式中:pb為機器人基座位姿信息;pt為機器人末端工具的位姿信息;為機器人末端工具與機械臂基座之間的轉換矩陣。
通過以上坐標矩陣之間的轉換關系可以得到系統之間的配準矩陣為:

在系統工作流上,用戶先將患者佩戴影像標志物拍攝的DICOM圖像導入手術導航系統中,在手術導航系統中根據工作流進行患者信息管理、影像的分割與重建和相應的術前軌跡規劃,在完成以上術前準備工作后,通過對應的通信協議完成和機械臂控制系統之間的信息通信,控制系統在接收到位置信息后,進行相應關節的運動,保證路徑執行的精確性,最后在手術機器人的輔助定位下,由醫生完成剩下的精準手術操作。同時在安全控制系統中進行虛擬邊界、防碰撞等安全保護設計,保證運動過程中不會和其他物品發生碰撞,下面針對電磁導航手術機器人系統用到的關鍵技術展開論述。
1.2 電磁導航系統
電磁導航系統主要由4部分組成,分別是磁場發生器、磁場傳感器、信號處理單元和系統控制器。系統的工作原理是通過將磁場傳感器放置在磁場發生器產生的磁場區域中,傳感器檢測到磁場信號,再通過信號處理單元進行信號的濾波和分析并傳遞到系統控制器,最后通過磁場信號的變化進行傳感器位置和姿態的檢測。
該項目為了保證測量的精度,首先要保證傳感器能夠穩定固定,需要根據術種對傳感器進行加工設計,設計時需要考慮以下內容:磁場傳感器便于安裝和拆卸,傳感器的清潔和消毒等。在骨科手術中,由于手術部位為堅硬不會輕易發生形變的骨性物質,因此我們在具有標志性的位置上進行固定位的選擇,從而使術中傳感器位置和術前設計保持一致。比如在關節置換類手術時就將傳感器安裝在醫用PEEK材料制作的固定架上,通過鈦釘固定在手術區域。
在顱面手術中,由于牙齒的大小不一致,具有天然的可識別特性,在設計時可以考慮將傳感器和牙齒進行匹配固定,這樣既增加了固定的穩定性同時也實現了無創安裝,降低了對患者的傷害,設計的磁場傳感器及固定裝置如圖3所示。在該系統中設計了固定裝置并將其固定在牙套上,在固定裝置上有用于進行空間定位用的定位球,定位球之間設置不同的識別距離。通過該設計,不僅可以實現傳感器的快速安裝和拆卸,術者在佩戴該裝置后獲得的影像也可用于術中的系統配準。同時裝置尺寸設計得較小,在術中不會對醫生造成手術視野的遮擋以及使用器械時產生干擾。

圖3 磁場傳感器及固定裝置Fig.3 Magnetic field sensor and fixed device
使用機器人導航系統進行輔助治療的核心功能是實現精準導航。為此,系統在手術環境、末端工具和配準技術上進行了優化創新。
在手術環境上,對于醫生使用的手術拉鉤等輔助醫療器械,采用3系列的不銹鋼材料制作,盡量減少磁性物質帶來的干擾。末端工具也采用316不銹鋼材質并根據手術需要進行設計。
除了以上減少電磁導航系統干擾源的措施,重要的技術手段就是實現影像、機械臂和患者3個坐標系統的精確配準。在本配準算法中,利用高通閾值分割算法分割出4個定位金屬球所在的圖像區域并識別出球心位置,從而自動識別出DICOM影像空間坐標系下的定位球的空間坐標。在患者佩戴固定裝置后,利用磁場傳感器獲取術中磁場坐標系下的固定裝置定位球的空間坐標。最后通過坐標轉換算法可以建立影像空間坐標系與患者之間的配準轉換關系。該轉換關系可在患者發生運動時實時更新,從而適應手術的患者擺位要求。
為了保證系統在坐標系配準過程中相對位置保持固定不變,需要采用固定裝置對手術部位進行固定,本項目中患者的頭部保持固定,系統設計了下頜固定裝置。本裝置的一端通過鈦釘固定在患者的下頜處,另外一端通過氣動臂裝置固定在手術床床旁的固定裝置上。
1.3 手術導航系統的設計
手術導航系統作為核心的功能軟件,在設計時需要注重人機交互性,幫助用戶快速熟悉設備的使用,界面如圖4所示。

圖4 手術導航系統界面Fig.4 Surgical navigation system interface
在軟件布局中采用功能模塊化設計,功能模塊包括用戶登錄、患者信息管理、圖像瀏覽與處理、路徑規劃、數據保存5個模塊。
用戶登錄模塊:在此模塊區域內可根據使用用戶的不同,進行用戶權限的配置,防止不同用戶操作軟件帶來的軟件配置信息更改,保證了軟件在不同用戶使用時的安全性。
患者信息管理模塊:進行患者信息的導入和分類,建立患者信息數據庫,方便用戶調用和分析數據。
圖像瀏覽與處理模塊:此模塊主要用于影像顯示、術前影像分割和影像模型重建。用戶可以通過該功能模塊完成DICOM影像的導入,通過對導入圖像的閾值分析和采用邊緣檢測的圖像算法對圖像各組織進行影像分割。通過該操作可以明顯地區分血管、肌肉和骨骼等組織,保證用戶可以實現精準操作。在完成分割后,可以進行影像的三維重建,通過重建圖像用戶可以快速識別手術區域的操作信息,便于病灶點的診斷和手術操作。通過影像顯示區域,顯示影像的分割和重建狀態,也實時顯示術前和術中執行的影像操作,便于操作者觀察。
路徑規劃模塊:在影像完成分割和重建之后,用戶對手術區域進行末端工具的路徑規劃操作。在確定好病灶點和路徑操作方式后,將位置信息傳遞給機械臂控制系統,保證機械臂按照預先規劃的軌跡運動,到達預定位置后由操作者執行具體的手術操作。
數據保存模塊:此模塊可以進行整個操作的數據保存和導出,方便用戶收集和分析數據。
通過對以上功能模塊的介紹,可以看到本手術導航系統采用模塊化設計,具有界面清晰、操作簡單的優點,通過該軟件工作流操作,可以保證醫生熟悉設備的使用并執行精準的手術操作,降低術中對血管、神經組織的傷害,降低術后后遺癥的發生。
1.4 手術末端工具的設計
在手術機器人的設計中,手術末端作為最終的執行部分發揮了關鍵作用。末端工具設計是否合理,決定了手術的成敗。傳統術中使用的工具由于沒有考慮安裝到其他設備上,所以不能直接安裝到機器人的末端。因此在手術機器人系統的研發中,重要的工作就是要根據術種的需要進行末端工具的重新設計,保證其能夠完成預期用途。
在設計過程中要考慮以下設計因素,首先要確定末端應用的術種,根據手術環境的需要,對其外觀、尺寸進行設計。除此以外在設計過程中要考慮的因素還有使用頻次、消毒方式、材質要求、加工精度等。本項目中針對顱面外科設計的部分末端工具如圖5所示,工具分成了母端手柄和子端工具2個部分,根據電磁導航設備需要防止強磁性金屬干擾的需求,末端采用了316不銹鋼材料,使用該材料不會對磁場產生干擾,同時也可以高溫消毒滅菌。根據使用目的,對其形狀進行設計,該末端工具的母端手柄外形修長,可以防止機器人的關節進入磁場區域產生干擾,同時子端工具設計用來進行顱面截骨操作的截骨導板。用戶通過該末端工具可以在狹小的空間內執行截骨路徑的精準定位和工具移動,在子端導板工具沿著重合的規劃截骨面運動的過程中,醫生操作截骨工具沿著導板邊緣同步實施精準的截骨操作。
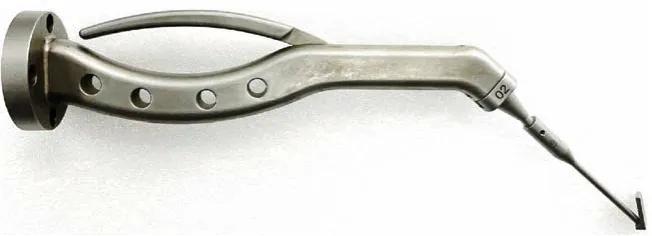
圖5 末端工具Fig.5 End-effector tool
1.5 手術機器人的安全功能設計
為保證手術機器人的操作安全性,要對其主動安全和被動安全功能進行設計。在安全設計上,除了最基本的急停設置外,在其路徑規劃、機械臂力反饋等方面分別進行安全保護設計。
在路徑規劃時,采用虛擬空間建模,其作用是防止機械臂在執行軌跡運動時,各運動關節不會和該空間發生干涉。導航系統根據導入的患者三維模型數據信息進行虛擬空間建模,機械臂利用手術區域的虛擬空間信息,進行各關節運動角度的逆解,可以確定出一條符合手術要求的最優路徑,保證機械臂運動時不會和人體及外圍設備發生碰撞,保護患者和設備的安全。
為了防止機械臂在運動過程中受到外力作用發生故障,機械臂具有力反饋功能。當機械臂受到超過保護閾值的外力作用時,機械臂停止運動,起到保護患者和設備的作用。
1.6 手術機器人工作流程的設計
在手術操作中,合理的手術工作流程對手術的成功至關重要。基于骨科手術操作特性,設計了一套能夠順利執行本項目的手術機器人工作流程,工作流程分為術前的手術規劃和術中快速執行操作,通過術前確定標志點、影像重建和手術路徑規劃能夠有效節省術中準備時間。術中,醫生在完成患者擺位和前期臨床準備工作后就可導入術前和患者確定的設計方案。在保證系統配準符合要求后,可沿著規劃的截骨面進行精準操作,整個過程可以縮短手術時長,降低患者感染風險。手術機器人工作流程如圖6所示。
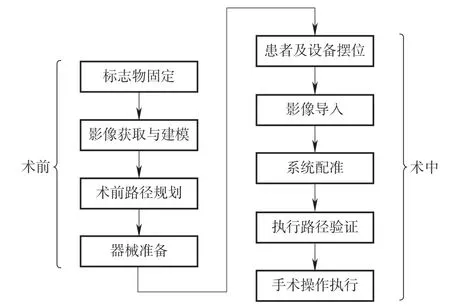
圖6 手術機器人工作流程Fig.6 Surgical robot workflow
2 試驗驗證
為了驗證本系統的有效性,進行了模型的精度驗證試驗。以下頜骨的截骨手術為應用對象,為其設計手術方案。試驗方案及流程如下:
根據患者的掃描信息制作頭部模體,模型如圖7所示。在模體中安裝驗證標志點,在成像時該標志點具有和模型不同的顯影閾值信息,可以方便用戶在圖像中根據標志點位置進行系統精度驗證。試驗中使用CT獲取該模型的影像信息并將其DICOM圖像導入手術導航軟件,進行影像的分割和建模,最后根據手術需要進行截骨路徑的規劃。

圖7 頭部模型Fig.7 Head model
在規劃階段,先確定好截骨的角度以及路徑所在的平面,并在導航界面中進行截骨面的展示,同時使用虛擬子端模型對其進行末端工具位姿的顯示。執行完軌跡規劃后,通過機械臂將末端工具精準運動到設計的初始位置,子端工具的截骨面與設計的截骨面重合,其姿態與虛擬子端工具一致,隨后由醫生手持截骨用的鋸片沿著子端導板工具的運動方向實時進行截骨操作,整個過程中末端工具會沿著規劃截骨面定位和軌跡引導,可以保證醫生在缺乏經驗的情況下精準實現截骨操作并提高手術精度。導航系統的設計方案和實際的末端工具定位位置如圖8所示。
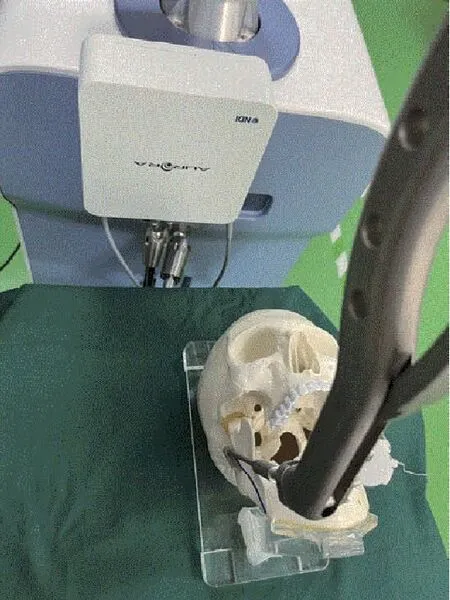
圖8 系統設計方案和定位精度驗證Fig.8 System design scheme and positioning accuracy verification
通過模型的精度驗證可以看到,機械臂的末端工具可以按照手術方案進行子端工具的定位,工具緊貼設計的位置,系統導航精度≤2 mm,能夠滿足手術的要求。
通過試驗證明了在空間結構復雜或狹小的區域,磁導航的手術機器人可以避免光學導航定位系統的光線干涉問題,整個系統通過對系統配準算法、末端工具和軟件工作流程等各個細節進行系統的設計可以滿足手術的精度要求。本系統可以在手術方案設計時避免對神經和血管等組織造成傷害,降低手術對用戶經驗的要求,減少術后并發癥的發生。
3 總結與展望
通過模型驗證證明了采用電磁導航系統的手術機器人的有效性,但需要很多的工作來逐步完善系統。比如當前的手術方案還依賴于醫生的經驗,需要醫生根據其自身的經驗對手術位置進行定位和選擇合適的手術工具進行手術。在將來的研發中,可以順應當前人工智能技術的發展,通過對樣本集特征提取和分析實現智能手術方案的設計,減輕醫生的負擔[10]。同時根據應用的需要,設計更多符合預期使用用途的個性化末端工具,將手術機器人應用到更多的手術環境當中。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
河北畫報(2020年10期)2020-11-26 07:20:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
Coco薇(2016年1期)2016-01-11 16:53:24