人工智能賦能麻醉監護儀實現麻醉深度監測
2023-02-12 15:13:04郭藝杜秋晨吳朦朦李冠華
中國醫療器械雜志 2023年1期
【作 者】 郭藝,杜秋晨,吳朦朦,李冠華
1 火箭軍特色醫學中心,北京市,100088
2 北京航空航天大學,北京市,100191
0 引言
麻醉是指由藥物產生的中樞神經以及周圍神經的臨時性功能抑制,表現為可逆性意識消失、肌肉松弛等臨床現象[1]。麻醉深度監測是手術中至關重要的環節,對手術的平穩進行和患者的術后康復起著決定性的作用。麻醉深度監測方式包括主觀方式和客觀方式,主觀方式由麻醉醫師通過觀察給藥后患者的心跳、呼吸、循環以及肌張力等生命體征來判斷麻醉深度,雖然準確性高,但對麻醉醫師經驗要求較高;客觀方式采用監護儀器監測患者的各項生命體征,通過特定算法給出麻醉深度的定量評價。客觀方式直觀反映麻醉深度的數值,減輕了手術中麻醉醫師的工作量,已成為主要研究方向,研究重點在于建立生命體征與麻醉深度之間的關系。
目前由于麻醉藥物的作用機制沒有得到充分認識,麻醉深度監測沒有形成統一的評價標準[2]。大量研究發現腦電(electroencephalogram,EEG)信號能夠反映藥物對患者中樞神經的影響,進而反映患者的意識狀態,已成為主流的麻醉深度監測方法,其中應用最廣泛的是腦電雙頻指數(bispectral index,BIS)。文獻[3]提出基于BP(back propagation)神經網絡的腦電圖麻醉深度預測模型;文獻[4]設計了用于麻醉深度檢測的模糊神經網絡模型。雖然腦電信號能夠反映麻醉深度,但由于腦電監測儀成本較高,并且腦電信號容易受到年齡、低溫和腦缺氧等因素影響,導致麻醉深度監測有較大局限性。
心電圖(electrocardiogram,ECG)是圍術期監測的生理特征之一,已作為國際公認標準方法[5]。由于心電圖可通過普通麻醉監護儀低成本獲取,并且心電圖包含的信息能夠反映麻醉深度,很多研究者從腦電圖的研究轉向心電圖的研究。腦電信號和心電信號均具有非線性特征,用于腦電信號麻醉深度估計的人工智能方法同樣可用于心電信號。文獻[6]提出了基于心電圖(ECG)和脈搏波(photoplethysmography,PPG)的麻醉深度預測,將一維ECG和PPG信號分段拼接成二維圖像,利用多層卷積神經網絡(convolutional neural network,CNN)進行麻醉深度預測;文獻[7]利用心率變異度(heart rate variability,HRV)作為特征,基于人工神經網絡實現麻醉深度判斷。在上述方法的基礎上,本研究充分考慮監護儀信號的時序性,提出了卷積神經網絡(CNN)和長短期記憶網絡(long and short-term memory network,LSTM)相融合的麻醉深度監測模型。
1 材料與方法
基于人工智能的麻醉深度監測方法的整體架構如圖1所示。核心為基于卷積神經網絡和長短期記憶網絡的人工智能算法,算法輸入為來自麻醉監護儀的ECG、PPG和HRV推導出的心率變異性,算法輸出為麻醉深度分類,包括麻醉誘導、麻醉維持和麻醉蘇醒3個階段。
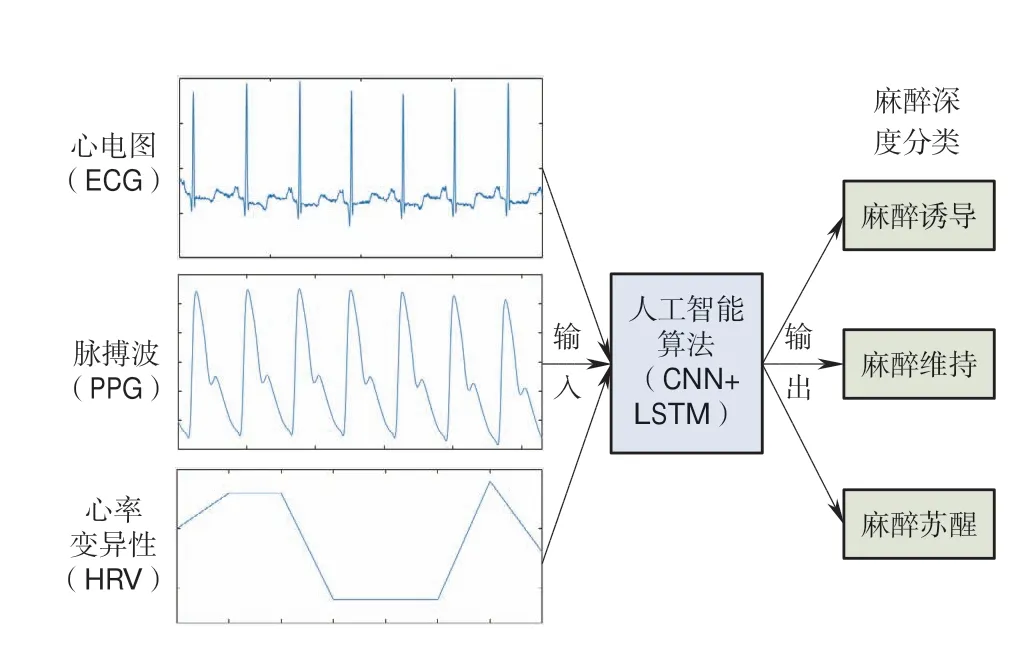
圖1 人工智能麻醉深度監測方法整體架構Fig.1 Overall framework of artificial intelligence anesthesia depth monitoring method
心電圖和脈搏波是圍術期中重要的監測信號,能夠直接反映麻醉深度。心率變異性指心跳周期之間的差異情況,能夠反映中樞神經系統對心臟搏動節律的調整,已經作為自主神經功能評價中最準確的無創指標,與麻醉深度密切相關[8]。心率變異性雖然不能直接從麻醉監護儀中觀察得到,但可以通過心電圖中兩個相鄰的R波間隔計算得出。
人工智能算法采用基于CNN和LSTM的分類方法。CNN通過卷積操作提取3種輸入信號的局部信息,LSTM通過復雜的門控結構學習長時間的時序信息,并且還可以對這些信息進行篩選,對序列數據具有很強的特征提取能力。因此,我們在文獻[9]的模型基礎上進行改進,設計了CNN和LSTM相結合的人工智能麻醉深度監測算法模型,如圖2所示。
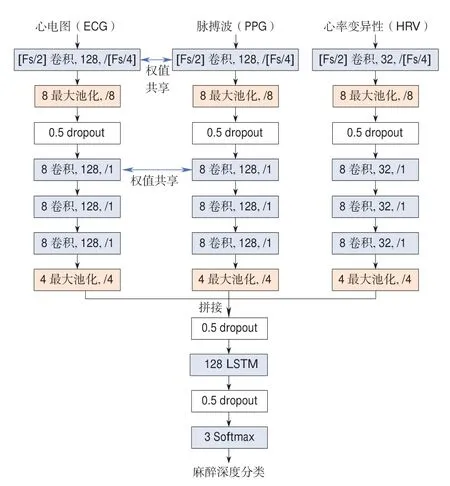
圖2 人工智能麻醉深度監測算法模型Fig.2 Artificial intelligence anesthesia depth monitoring algorithm model
算法模型分為上下兩個部分,上半部分采用CNN提取ECG、PPG和HRV的局部特征信息,對應上半部分的3個分支。3個分支的模型結構相同,均包含4個卷積層、2個最大池化層和1個dropout層。由于ECG和PPG的波形和采樣頻率相近,ECG和PPG分支采用相同的卷積核大小、數量和步長等參數。為了利用多任務學習的思想提高特征提取的有效性,使ECG和PPG分支的前兩個卷積層共享權值,即采用相同的權值。前兩個卷積層主要用于提取淺層特征,可看作提取不同信號特征的濾波器,通過ECG和PPG兩個任務的訓練,提取到的特征更具通用性,且降低了模型參數量。后兩個卷積層用于提取深層特征,即ECG和PPG特有的特征,不采用共享權值方式,兩者分別訓練。由于HRV通過ECG計算得到,HRV的變化率低于ECG,所以提取HRV特征的卷積核數量較少,在降低模型參數量的情況下保證模型準確性。下半部分是上半部分的3個特征按通道拼接后,通過LSTM提取的時序特征,最后通過Softmax獲取每個麻醉深度分類的概率,選擇最大概率對應的類別作為麻醉深度分類。
人工智能算法模型采用遷移學習的方式進行訓練。遷移學習利用麻醉深度監測方法之間的相關性,把已經訓練好的模型參數遷移到新的模型中,賦予新的模型先驗知識,從而提高分類精度。本研究提出的人工智能算法模型在文獻[9]的基礎上進行遷移學習,兩者的模型結構基本相同,本研究在模型上半部分設計了3個分支,文獻[9]上半部分是單個分支,因此3個分支采用相同值初始化。
在3種麻醉深度分類中,麻醉蘇醒預測的準確性至關重要,因為患者可能會產生術中知曉,影響術后恢復,反之,麻醉誘導和麻醉維持之間分類錯誤并不會對患者產生較大影響。因此,模型訓練中的損失函數采用加權Softmax函數對3種麻醉深度分類結果賦予不同的權重,即加大麻醉蘇醒預測錯誤的懲罰。
2 實驗結果
實驗數據集的建立是開展實驗的前提條件。從麻醉監護儀中采集了50例全身麻醉患者手術過程中的ECG和PPG數據,并計算出HRV作為算法模型的輸入數據。由經驗豐富的麻醉醫生記錄手術過程中患者的麻醉深度,作為算法模型的標簽數據。由于輸入數據和標簽數據是連續的,按每5 s截取一段輸入數據和對應的標簽數據構建數據集,認為5 s之內麻醉深度保持不變。共提取出1000條數據構成數據集。
實驗中所用的硬件平臺CPU為Intel i7-7700K,16 GB內存,顯卡為NVIDIA GTX1080,8 GB顯存。軟件系統為CentOS7,Python版本為3.6.8,深度學習框架為Tensorflow 1.11.0。實驗數據集按照4∶1隨機劃分為訓練集和測試集,即訓練集800條數據、測試集200條數據。訓練前需要選取合適的超參數,主要包括批尺寸和學習率。批尺寸的選擇主要考慮顯存容量,實驗中設置最大批尺寸為32。學習率的選擇由訓練過程的誤差曲線決定,曲線下降緩慢應增大學習率,曲線振蕩較大應減小學習率,通過試驗選擇學習率為0.001,能保證模型穩定收斂。
為了證明本研究所提出的人工智能模型有效,以本研究中采集的數據集作為實驗樣本,對比了文獻[6]和文獻[9]的結果。同時為了證明遷移學習的有效性,對比了模型訓練中沒有使用和使用了遷移學習的情況,評價指標采用準確率和損失值,實驗結果如表1所示。

表1 實驗結果對比Tab.1 Comparison of experimental results
本研究提出使用人工智能技術賦能麻醉監護儀實現麻醉深度監測方法。該方法從麻醉監護儀中獲取ECG和PPG,并從ECG中計算出HRV,將ECG、PPG和HRV作為人工智能模型的輸入數據。人工智能模型采用CNN和LSTM相融合的結構,利用權值共享的方式減少訓練參數并提高模型的麻醉深度分類能力。人工智能模型采用遷移學習的方法進行訓練,采用加權Softmax損失函數,提升了麻醉蘇醒狀態監測的準確性,降低了患者術中知曉的風險。實驗結果表明,本研究提出的方法能夠有效監測麻醉深度,準確率達94.1%,優于所有對比方法,表明本方法能夠實現準確的麻醉深度監測。
本研究的創新點在于:
(1)提出卷積神經網絡和長短期記憶網絡相融合的麻醉深度監測模型,具有提取長時間段內生理特征的能力,可結合過去和現在的生理特征,提高麻醉深度估計的準確性。
(2)采用ECG、PPG、HRV作為監測模型的輸入,可通過普通麻醉監護儀采集到這些信息,不增加額外的監護儀器,降低了手術成本。
本方法雖然在麻醉深度監測方面取得了較好的效果,但由于僅使用了EGG、PPG作為判斷麻醉深度的條件,沒有充分利用麻醉監護儀的數據。后續研究中應考慮血氧飽和度等麻醉監護數據,進一步提高麻醉深度監測的準確性。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
小康(2017年16期)2017-06-07 09:00:59