基于多能物聯(lián)的水電站智能巡檢機(jī)器人研究
2023-02-13 06:32:16金大剛毛青海陳自強(qiáng)張福興熊杰
電器工業(yè) 2023年1期
金大剛 毛青海 陳自強(qiáng) 張福興 熊杰
(1.陜西省水電開(kāi)發(fā)有限責(zé)任公司二郎壩發(fā)電公司2. 深圳市精實(shí)機(jī)電科技有限公司 3.華自科技股份有限公司)
0 引言
水電站是清潔能源供給的有效形式之一。隨著信息網(wǎng)絡(luò)與通信技術(shù)、裝備的發(fā)展與應(yīng)用,原有的水電站監(jiān)測(cè)與巡檢裝置越來(lái)越不適應(yīng)現(xiàn)代化水電站的運(yùn)維要求。尤其在中小型無(wú)人值班、少人值守的日常巡檢中,傳統(tǒng)的人工巡檢方式正逐步被淘汰,取而代之的是更加智能、全面、精準(zhǔn)可控的固定式或移動(dòng)式巡檢機(jī)器人。相比于人工巡檢,智能機(jī)器人在水電站巡檢的過(guò)程中具有智能化水平高、便于集約化管理以及經(jīng)濟(jì)高效等優(yōu)點(diǎn)。目前國(guó)內(nèi)外學(xué)者對(duì)巡檢機(jī)器人進(jìn)行了大量理論研究與產(chǎn)業(yè)探索,總結(jié)起來(lái)主要包括如下幾個(gè)方面:①巡檢機(jī)器人的分類(lèi),主要面向電站電廠巡檢、輸配電線路巡檢、變電站巡檢、用電終端服務(wù)巡檢機(jī)器人;②巡檢機(jī)器人工作原理與應(yīng)用功能方面,主要研究?jī)?nèi)容包括自主導(dǎo)航、表計(jì)讀數(shù)、紅外測(cè)溫、視頻監(jiān)視、智能分析、異常預(yù)警等方面;③巡檢機(jī)器人關(guān)鍵技術(shù)方面,重點(diǎn)包括視覺(jué)大數(shù)據(jù)分析技術(shù)、視覺(jué)識(shí)別與智能交互技術(shù)、基于AR/VR的多目標(biāo)識(shí)別技術(shù)、圖像及語(yǔ)音識(shí)別技術(shù)、自主導(dǎo)航與精準(zhǔn)控制技術(shù)、人工智能與云計(jì)算技術(shù)、物聯(lián)網(wǎng)技術(shù)、虛擬現(xiàn)實(shí)技術(shù)等;④在電力巡檢機(jī)器人指標(biāo)先進(jìn)性方面,重點(diǎn)圍繞可接入傳感器數(shù)量、傳輸速率峰值、平均功耗情況、缺陷圖像的識(shí)別率;⑤在巡檢機(jī)器人應(yīng)用發(fā)展新方向上,重點(diǎn)圍繞巡檢機(jī)器人與傳感器協(xié)同、機(jī)器人與高清視頻協(xié)同、機(jī)器人與智能故障診斷系統(tǒng)協(xié)同、平臺(tái)為核心的智能生態(tài)、多元數(shù)據(jù)融合、智能輔助決策。然而,現(xiàn)有的水電站機(jī)器人巡檢的智能化水平,尤其是多臺(tái)智能巡檢機(jī)器人組網(wǎng)后的平臺(tái)化、集約化管理方面還有很多的問(wèn)題值得研究。為了提高水電站巡檢機(jī)器人的巡檢效率與效益,本文研究并提出了基于多能物聯(lián)技術(shù)的智能巡檢機(jī)器人,并結(jié)合實(shí)際應(yīng)用情況進(jìn)行案例分析。
1 基本概念
1.1 巡檢機(jī)器人
巡檢機(jī)器人是指廣泛應(yīng)用于工業(yè)、電力、工控、環(huán)保、智能運(yùn)維等領(lǐng)域,具有精準(zhǔn)定位、路線規(guī)劃、智能避障、自主或成組作業(yè)等功能,實(shí)現(xiàn)終端表計(jì)數(shù)據(jù)識(shí)別、信息歸類(lèi)與上傳、巡檢作業(yè)管理以及智能故障診斷的固定式或移動(dòng)式機(jī)器人,能夠部分或全面代替人工實(shí)現(xiàn)場(chǎng)站的無(wú)人值守。在功能方面,巡檢機(jī)器人具有導(dǎo)航定位、無(wú)軌運(yùn)行、數(shù)據(jù)抄讀、智能測(cè)溫、遠(yuǎn)程可控、故障識(shí)別、異常預(yù)警、聯(lián)動(dòng)告警、自動(dòng)充電等功能。
1.2 多能物聯(lián)
多能物聯(lián)指面向能源生產(chǎn)與能源消費(fèi)的能源多元化需求,基于能量轉(zhuǎn)換、能量存儲(chǔ)、能量調(diào)控等設(shè)備設(shè)施,利用物聯(lián)網(wǎng)、大數(shù)據(jù)、人工智能等信息技術(shù),實(shí)現(xiàn)能量與信息流深度融合,多種能源的協(xié)同互補(bǔ)、安全高效和智能管控,具備能源設(shè)備狀態(tài)全面感知、能量流動(dòng)系統(tǒng)監(jiān)測(cè)、能源效率綜合提升、能源安全有效保障等能力,支持能源產(chǎn)業(yè)面向多能、綠能、節(jié)能、智能的方向持續(xù)發(fā)展。其中,多能是指多種類(lèi)能源、多品質(zhì)能源、多能源形式;物聯(lián)是指基于能源設(shè)備的能量互連、基于信息技術(shù)的信息互聯(lián)、基于信息物理的深度耦合。多能物聯(lián)平臺(tái)是面向包括水電站智能巡檢等多應(yīng)用場(chǎng)景的一體化平臺(tái),優(yōu)勢(shì)在于實(shí)現(xiàn)終端設(shè)備即插即用、需則可用,以及系統(tǒng)層態(tài)勢(shì)感知、理解與利導(dǎo)。
2 基于多能物聯(lián)的水電站管控平臺(tái)
2.1 基于多能物聯(lián)的水電站平臺(tái)架構(gòu)
基于多能物聯(lián)的水電站采用“三層兩網(wǎng)”的結(jié)構(gòu)進(jìn)行設(shè)計(jì)。其中,三層就是廠站層、單元層、過(guò)程層,兩網(wǎng)即為“廠站層網(wǎng)”和“過(guò)程層網(wǎng)”,據(jù)此對(duì)場(chǎng)站進(jìn)行分層分區(qū)管理。
“過(guò)程層網(wǎng)”將水電站的各種設(shè)備信息上傳到單元層,然后從單元層接收廠站層下達(dá)的控制命令。
“廠站層網(wǎng)”按雙星型網(wǎng)絡(luò)架構(gòu)設(shè)計(jì)。其中安全I(xiàn)區(qū)是最重要的生產(chǎn)控制區(qū),并按“三層二網(wǎng)”的結(jié)構(gòu)設(shè)計(jì)。安全I(xiàn)區(qū)是指直接用于生產(chǎn)的設(shè)備區(qū),主要包括水電站的控制設(shè)備、發(fā)電、供電、調(diào)度等設(shè)備區(qū)。安全I(xiàn)I區(qū)是非生產(chǎn)控制區(qū),主要提供有關(guān)的控制參數(shù),如電度計(jì)量、發(fā)電計(jì)劃、保護(hù)定值管理、故障錄波、設(shè)備運(yùn)行狀態(tài)監(jiān)測(cè)、洪水預(yù)報(bào)、中長(zhǎng)期水文預(yù)報(bào)等設(shè)備區(qū)。安全I(xiàn)II區(qū)是信息管理區(qū),主要管理大壩監(jiān)測(cè)、視頻圖像顯示、設(shè)備狀態(tài)檢修、消防系統(tǒng)管理、智能生產(chǎn)管理、行政辦公管理、Web發(fā)布等等功能區(qū)。為了網(wǎng)絡(luò)的安全可靠,要求安全I(xiàn)區(qū)與安全I(xiàn)I區(qū)之間用防火墻隔離,安全I(xiàn)I區(qū)與安全I(xiàn)II區(qū)之間用橫向隔離裝置(含正向隔離裝置與反向隔離裝置)隔離。所有安全區(qū)的運(yùn)行軟件,均在一體化管控平臺(tái)上運(yùn)行。
2.2 基于多能物聯(lián)的水電站平臺(tái)功能
(1)梯級(jí)調(diào)度的聯(lián)合控制
水電站梯級(jí)調(diào)度系統(tǒng)應(yīng)達(dá)到合理調(diào)度用水、防洪、灌溉、發(fā)電等目的。為完成最優(yōu)的梯級(jí)調(diào)度,需要開(kāi)展水電站流域的水情水文預(yù)報(bào),以便合理安排水電站的發(fā)電計(jì)劃,提高水量和水頭的利用效率,應(yīng)根據(jù)具體情況制定梯級(jí)調(diào)度的計(jì)劃,并根據(jù)情況的變化及時(shí)修改調(diào)度計(jì)劃。
(2)現(xiàn)地與遠(yuǎn)程控制的聯(lián)合控制
由于整個(gè)系統(tǒng)采用開(kāi)放式、分層、分布式的網(wǎng)絡(luò)系統(tǒng),故而具有多級(jí)調(diào)控的能力,既能在現(xiàn)地對(duì)設(shè)備進(jìn)行控制,也能在分調(diào)度或總調(diào)度等處進(jìn)行控制,極大地方便用戶根據(jù)具體情況選擇控制模式。
(3)數(shù)據(jù)的采集與交換
實(shí)時(shí)采集各控制點(diǎn)的數(shù)據(jù),根據(jù)采集的數(shù)據(jù)和規(guī)定的策略進(jìn)行控制、操作、報(bào)警等工作,格式化處理后,存入實(shí)時(shí)數(shù)據(jù)庫(kù)。數(shù)據(jù)庫(kù)的實(shí)時(shí)數(shù)據(jù)可供查詢、遠(yuǎn)傳、交換等處理。
(4)數(shù)字化視頻監(jiān)控
用最先進(jìn)的數(shù)字化視頻監(jiān)控技術(shù),實(shí)現(xiàn)視頻信號(hào)的數(shù)字化通訊,為調(diào)度系統(tǒng)、水電站各系統(tǒng)提高安全防范措施,增強(qiáng)對(duì)突發(fā)事件的快速反應(yīng)能力,因而使得遠(yuǎn)程監(jiān)控系統(tǒng)的管理與維護(hù)變得更加容易。
(5)梯級(jí)水電站的群控與自動(dòng)安全監(jiān)測(cè)
對(duì)整個(gè)梯級(jí)的各級(jí)水電站實(shí)現(xiàn)集中控制,通過(guò)各種自動(dòng)化監(jiān)控技術(shù)及分析技術(shù),達(dá)到水的利用率與水電站出力的最佳配合。并且預(yù)警水電站設(shè)備和水工建筑物的運(yùn)行狀態(tài),保障梯級(jí)水電站的安全運(yùn)行。
(6)遠(yuǎn)程Web瀏覽系統(tǒng)
Web瀏覽系統(tǒng)作為B/S構(gòu)架的監(jiān)控信息發(fā)布平臺(tái),采用XML技術(shù)對(duì)信息進(jìn)行分類(lèi)分層管理。任何一個(gè)水電站只要接上Internet網(wǎng)(需加華自網(wǎng)關(guān)),可以實(shí)現(xiàn)在任何一臺(tái)計(jì)算機(jī)終端上,通過(guò)上網(wǎng)的方式訪問(wèn)服務(wù)器站點(diǎn),可以實(shí)現(xiàn)查詢水電站的主接線圖、實(shí)時(shí)數(shù)據(jù)、開(kāi)停機(jī)流程、各種報(bào)表、曲線、歷史數(shù)據(jù)等功能,方便各級(jí)人員對(duì)整個(gè)水電站系統(tǒng)進(jìn)行及時(shí)的、全面的了解。
(7)設(shè)備的遠(yuǎn)程控制和調(diào)節(jié)
實(shí)現(xiàn)多個(gè)分控中心的遠(yuǎn)程聯(lián)合水量調(diào)度、電量調(diào)度,實(shí)現(xiàn)總水量的平衡調(diào)度,保證整個(gè)系統(tǒng)安全穩(wěn)定運(yùn)行。
3 基于多能物聯(lián)的智能機(jī)器人巡檢系統(tǒng)
3.1 智能機(jī)器人巡檢平臺(tái)
基于多能物聯(lián)的智能機(jī)器人巡檢平臺(tái)負(fù)責(zé)整個(gè)水電站的數(shù)據(jù)全面監(jiān)視、遠(yuǎn)程運(yùn)行控制、智能巡檢消缺等作用,見(jiàn)圖1。對(duì)于已建非智能水電站,利用多能物聯(lián)通訊終端提升信息接入率,利用多能物聯(lián)協(xié)調(diào)控制終端提升對(duì)關(guān)鍵應(yīng)用流程以及區(qū)域應(yīng)用的本地智能化水平,利用多能物聯(lián)儲(chǔ)能系統(tǒng)提升水電站用能的效率與效益,利用多能物聯(lián)平臺(tái)實(shí)現(xiàn)與原有平臺(tái)的融合或?qū)υ衅脚_(tái)進(jìn)行升級(jí)改造,據(jù)此提升平臺(tái)的智能監(jiān)管與運(yùn)維能力。
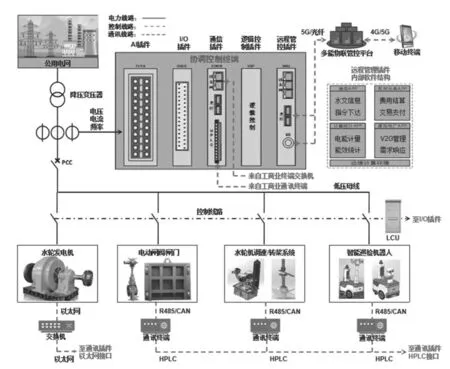
圖1 基于多能物聯(lián)的智能機(jī)器人巡檢系統(tǒng)應(yīng)用場(chǎng)景示意圖
智能機(jī)器人巡檢平臺(tái)運(yùn)行過(guò)程中,智能巡檢機(jī)器人作為終端信息采集設(shè)備,對(duì)水電中的變壓器、開(kāi)關(guān)設(shè)備(斷路器、隔離開(kāi)關(guān))、線路保護(hù)信息等進(jìn)行采集與細(xì)分,形成可用于多能物聯(lián)平臺(tái)支配的可調(diào)配資源。利用多能物聯(lián)協(xié)調(diào)控制終端實(shí)現(xiàn)對(duì)接入信息的就近協(xié)調(diào)、就地控制,比如基于智能巡檢機(jī)器人采集標(biāo)記數(shù)據(jù),對(duì)于數(shù)據(jù)越限的水電站終端設(shè)備進(jìn)行告警、隔離,避免事故擴(kuò)大。
3.2 智能機(jī)器人結(jié)構(gòu)組成
智能巡檢機(jī)器人包括機(jī)器人外部、機(jī)器人內(nèi)部、機(jī)器人組網(wǎng)系統(tǒng)三個(gè)部分,見(jiàn)圖2。其中:① 機(jī)器人外部包括機(jī)器人移動(dòng)底盤(pán)、機(jī)械臂、可見(jiàn)光攝像儀、紅外攝像儀、拾音器、充電樁、監(jiān)控軟件,可根據(jù)用戶要求搭載其他傳感器,如:異常氣體檢測(cè)、溫/濕度監(jiān)測(cè)、油/水滲漏識(shí)別、局放檢測(cè)。②機(jī)器人內(nèi)部包括控制裝置、電源、WiFi/5G/4G網(wǎng)絡(luò)等。通過(guò)機(jī)器人內(nèi)外部的互聯(lián)以及與多能物聯(lián)平臺(tái)的實(shí)時(shí)通信,能夠提高巡檢質(zhì)量以及設(shè)備巡視數(shù)據(jù)分析的效率與準(zhǔn)確性。數(shù)據(jù)分析由巡檢系統(tǒng)軟件自動(dòng)統(tǒng)計(jì)分析,并進(jìn)行故障診斷,與電站綜合自動(dòng)化系統(tǒng)聯(lián)動(dòng),為電站安全運(yùn)行保駕護(hù)航。③機(jī)器人組網(wǎng)系統(tǒng),通過(guò)巡檢機(jī)器人終端與多能物聯(lián)平臺(tái)協(xié)作,實(shí)現(xiàn)平臺(tái)與終端的組網(wǎng)協(xié)同運(yùn)行,并支持自動(dòng)巡檢模式與遙控巡檢模式。其中,在自動(dòng)巡檢模式下,智能巡檢機(jī)器人按照預(yù)制的巡檢內(nèi)容、行進(jìn)路徑對(duì)特定設(shè)備開(kāi)展常規(guī)巡檢,經(jīng)巡檢機(jī)器人獲得的設(shè)備信息(如表計(jì)數(shù)據(jù)、電壓電流、異常告警等)采集后自動(dòng)上傳到多能物聯(lián)平臺(tái),進(jìn)行數(shù)據(jù)存儲(chǔ)、分析及可視化展示。在遙控巡檢模式下,巡檢工作人員按照高優(yōu)先級(jí)遠(yuǎn)程實(shí)現(xiàn)對(duì)巡檢機(jī)器人巡檢內(nèi)容的控制,該模式下能夠?qū)崿F(xiàn)對(duì)重點(diǎn)設(shè)備、重要信息的查看與核實(shí)。
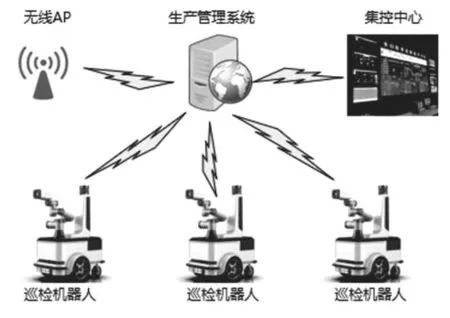
圖2 基于多能物聯(lián)的智能巡檢機(jī)器人組網(wǎng)結(jié)構(gòu)示意圖
3.3 智能機(jī)器人的巡檢范圍
智能巡檢機(jī)器人適應(yīng)無(wú)人值班或偏遠(yuǎn)地區(qū)的水電站,降低對(duì)人工的依賴,消除人工安全隱患,提高巡檢效率。智能巡檢機(jī)器人的巡檢范圍包括如下幾個(gè)方面:
① 戶外升壓站一次設(shè)備的外觀、聲音、溫度、油位、SF6氣體密度、避雷器泄漏電流、指示等各類(lèi)表計(jì)讀數(shù),斷路器、隔離開(kāi)關(guān)、接地刀閘的分合狀態(tài)、一次設(shè)備本體和接頭的紅外測(cè)溫等。② 戶內(nèi)電、油、氣、水等表計(jì)指示、斷路器和隔離開(kāi)關(guān)及接地刀閘等機(jī)械位置及電氣指示、狀態(tài)指示燈狀態(tài)、保護(hù)壓板位置。③ 發(fā)電機(jī)滑環(huán)和碳刷、變壓器、控制盤(pán)柜內(nèi)電氣元件、電動(dòng)機(jī)等設(shè)備紅外測(cè)溫。④ 廠房?jī)?nèi)氣體檢測(cè),判斷巡檢路線中有無(wú)火情、積水、漏油、SF6泄漏等情況。
3.4 智能機(jī)器人的功能作用
基于多能物聯(lián)平臺(tái)的智能巡檢機(jī)器人將現(xiàn)代服務(wù)業(yè)理念應(yīng)用于巡檢行業(yè),結(jié)合大數(shù)據(jù)及物聯(lián)網(wǎng)技術(shù),實(shí)現(xiàn)智能化運(yùn)維,提升運(yùn)維效率。智能巡檢機(jī)器人按設(shè)定巡檢任務(wù)對(duì)表計(jì)數(shù)據(jù)識(shí)別、紅外測(cè)溫、聲音檢測(cè)等定時(shí)自主巡檢,同時(shí)巡檢數(shù)據(jù)實(shí)時(shí)傳輸后臺(tái),形成數(shù)據(jù)報(bào)表,對(duì)被監(jiān)測(cè)物體出現(xiàn)異常自動(dòng)進(jìn)行預(yù)警,實(shí)現(xiàn)安全、綠色、高效的智能型電廠環(huán)境。
(1)巡檢路線規(guī)劃
根據(jù)現(xiàn)場(chǎng)的實(shí)際情況及需求生成直觀的可視化現(xiàn)場(chǎng)電子地圖,用以顯示關(guān)鍵點(diǎn)、巡檢點(diǎn)、設(shè)備、機(jī)器人的巡檢路徑及所在位置等信息。
(2)圖像識(shí)別
主要識(shí)別儀表讀數(shù)、指示燈狀態(tài)、開(kāi)關(guān)位置、液位高度等數(shù)據(jù)。
(3)紅外測(cè)溫
彩色圖像形式顯示視野范圍內(nèi)溫度,可遠(yuǎn)程精確測(cè)溫,無(wú)需接觸。
(4)噪聲識(shí)別
機(jī)器人搭載的拾音器采集發(fā)電機(jī)、變壓器等設(shè)備運(yùn)行中發(fā)出的聲音,通過(guò)對(duì)聲音進(jìn)行時(shí)域和頻域的分析,判斷設(shè)備工作狀態(tài)是否正常。(噪音分析功能還在研發(fā)中)
(5)自動(dòng)充電
機(jī)器人檢測(cè)到電量不足,自動(dòng)返回充電站充電,通過(guò)兩個(gè)金屬觸點(diǎn)自動(dòng)對(duì)位連通電源,無(wú)需人工管理,充滿一次電最大續(xù)航時(shí)間5h,并且安全有保障。
4 結(jié)束語(yǔ)
通過(guò)水電站智能巡檢機(jī)器人在二郎壩發(fā)電公司葫蘆頭電站的運(yùn)用,與人工巡檢相比,在巡檢效率與準(zhǔn)確率方面具有明顯優(yōu)勢(shì),尤其在水電站多點(diǎn)布局、成系統(tǒng)、平臺(tái)化的成組運(yùn)行智能巡檢機(jī)器人,優(yōu)勢(shì)更加顯著。基于多能物聯(lián)的水電站智能巡檢機(jī)器人,在系統(tǒng)架構(gòu)、結(jié)構(gòu)組成、巡檢范圍、功能作用及在終端信息采集及平臺(tái)化運(yùn)營(yíng)等多方面也具有明顯優(yōu)勢(shì)。本文的研究不僅有利于深化多能物聯(lián)技術(shù)在水電站智能運(yùn)維領(lǐng)域中的創(chuàng)新應(yīng)用,而且為更多水電站通過(guò)巡檢機(jī)器人開(kāi)展智能運(yùn)維提供了借鑒。
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
表面工程與再制造(2019年6期)2019-08-24 06:40:04
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年11期)2018-08-04 03:26:08
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
