無源無線加速度計的系統設計與仿真
2023-02-15 07:09:50易卓然薛松濤謝麗宇萬國春
哈爾濱工程大學學報 2023年2期
關鍵詞:信號
易卓然, 薛松濤,2, 謝麗宇,3, 萬國春
(1.同濟大學 土木工程學院, 上海 200092; 2.日本東北工業大學 工學部,仙臺 982-8577; 3.同濟大學 工程結構性能演化與控制教育部重點實驗室, 上海 200092; 4.同濟大學 電子與信息工程學院, 上海 201804)
隨著結構服役時間的延長,結構損傷逐漸累積。為確保結構服役能力,需要對結構進行實時監測[1]。其中,加速度傳感器在分析樓層振動[2],高層風荷載響應[3],旋轉體(如渦輪)運動穩定性[4],橋梁穩定性[4]等實際問題中具有獨特的作用。
傳統的適用于結構健康檢測的加速度傳感器,包括振弦式傳感器[5]、電容式傳感器[6]、光纖式傳感器[7]等,可以對結構的進行動態加速度檢測,但是,由于傳統傳感器采用電纜進行數據傳輸和能源供給,在復雜的檢測環境中,往往會產生極為復雜的布線,需要較高的人力成本,且檢測系統故障后較難排除和修復[8]。通過在加速度傳感器節點上增添電源供應設備,文獻[9-10]提出了數種有源無線加速度傳感器,實現了對加速度傳感器節點的無線訪問。但是,這些傳感器一方面體積較大,難以安裝,一方面往往較為昂貴,因此,很難應用于常態化、分布式的加速度傳感監測系統;另一方面,由于體積較大、占空較多,高速運動過程中失效概率較大,很難應用于混凝土埋置式監測和旋轉體的加速度監測中,限制了有源加速度傳感器的發展。
基于天線無線傳輸原理,學者提出了多種無源無線天線傳感器,成功實現了對建筑結構形變量的準靜態訪問[11-13]。由于天線本體受力并產生形變,傳感器測試準確度和量程會受到膠粘強度、剪力傳遞效率和基板力學性能的影響。因此,在實際使用中,學者基于帶附加單元的貼片天線,提出了數種不受力的貼片天線傳感器[13-17]。但是,由于采用的閱讀裝置多為傳統RFID閱讀器或矢量網絡分析儀,傳感器的訪問頻率受到了很大的限制。基于調頻連續波(frequency modulated continuous wave, FMCW)技術,Huang等[18-19]提出了一種高頻的天線訪問機制,對應變的測試進行了最高頻率為140 Hz的訪問。但是,目前,尚無檢測動態變量,如加速度的無源無線傳感器設計,也沒有學者對天線傳感器節點進行對應設計和研究。
基于FMCW訪問技術和天線設計原理,本文提出了一種無源無線加速度傳感系統,設計了兩種傳感器節點封裝類型,并于Matlab中驗證了該傳感系統的可行性。在讀取結構加速度的同時,傳感器的位置信息也可一并被閱讀器進行讀取。
1 系統組成與工作原理
傳感器系統由加速度傳感器終端、FMCW雷達訪問系統和數據采集后處理終端組成。在實際工作過程中,FMCW雷達訪問系統產生高頻震蕩電壓信號,經由發射天線轉換為掃頻電磁波信號對加速度傳感器終端進行訪問。傳感器終端對訪問信號進行吸收和背向散射,其背向散射信號被接收天線讀取,并經由功率分配器分成信路a和信路b,分別接入數據后處理終端。隨后,在信路a中,通過模數轉換器模塊將電壓信號轉儲為模擬信號,通過分析信號功率峰值得到加速度傳感器終端諧振頻率測量值;在信路b中,通過混頻器將輸出訪問信號與背向散射信號進行混頻,通過求取差頻得到天線位置。其工作流程如圖1所示。
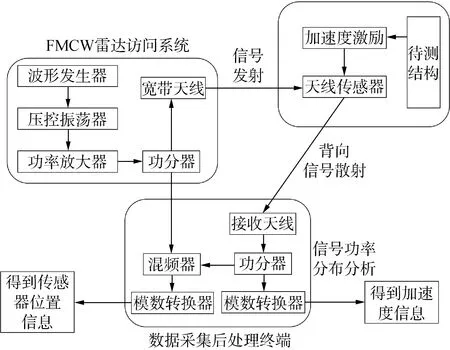
圖1 加速度傳感器的系統Fig.1 Mechanism and constitution of proposed accelerate sensing system
1.1 FMCW信號發生系統
FMCW信號發生系統主要由高頻信號發生部分和信號發射寬帶天線構成,其中,高頻信號發生部分發生高頻振蕩電壓信號,信號發射寬帶天線將電壓信號轉化為電磁波信號。其中,一般由波形發生器和壓控振蕩器負責電壓信號的產生與調制,寬帶天線將高頻震蕩電壓信號轉化為電磁波信號對外發射。一個典型的FMCW訪問信號如圖2所示。在圖2例中,波形發生器產生頻率為1 Hz的鋸齒波,壓控振蕩器對鋸齒波進行調制,對每個輸入電壓值對應調制高頻信號,其調制頻率區間為1~10 Hz。對于圖2系統,測量頻率為1 Hz,掃頻上界為10 Hz,掃頻下界為1 Hz。
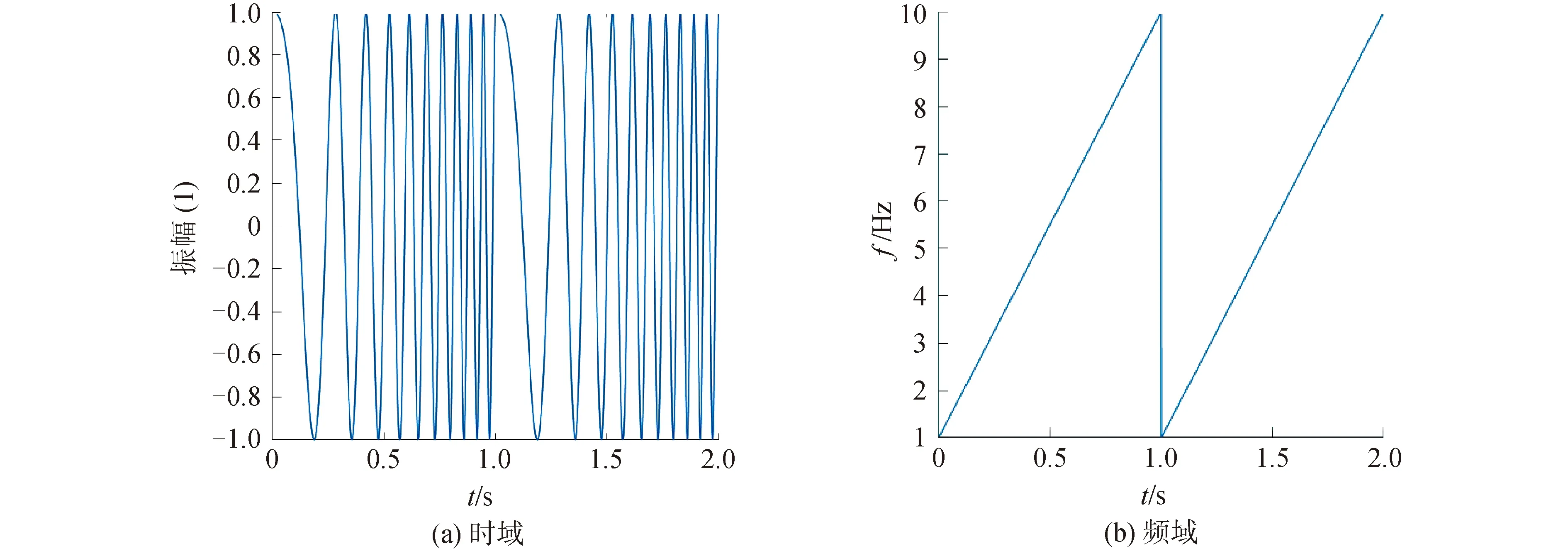
圖2 調頻連續波(FMCW)信號Fig.2 Signal of frequency modulated continuous wave (FMCW)
1.2 加速度傳感器終端模型
加速度傳感器終端由加速度傳感器節點和加速度傳感器外部封裝構成,其中,傳感器節點封裝將結構加速度轉化為傳感器節點內部組件的位移變化;傳感器節點負責接收FMCW雷達的訪問信號,并隨之發射包含有內部組件位移信息的背向散射信號。
在本節中,分別對傳感器節點設計和封裝設計進行介紹。
1.2.1 傳感器節點設計
采用組合式貼片天線作為加速度傳感器節點。一個典型的組合式貼片天線由一塊矩形貼片天線和一塊短接上貼片構成[20],如圖3所示。矩形貼片天線由上輻射貼片、中部介質板和接地平面構成,短接上貼片則由上覆介質板和短接貼片構成。在實際工作中,短接貼片和上輻射貼片緊密貼合,共同構成輻射單元,對外接收訪問信號并輻射背向散射信號。

圖3 組合式貼片天線Fig.3 Patch antenna with overlapped sub-patch
貼片天線厚度足夠小時,傳統單片式貼片天線的諧振頻率近似與其諧振單元長度成反比:
(1)
式中:f0是天線在初始狀態下的一階縱向諧振頻率;c是真空中的光速;εe是介質板的相對介電常數;L1是輻射貼片長度。
在組合式貼片天線中,假定短接貼片與上輻射貼片充分接觸,可以將組合式貼片天線諧振單元等效為短接貼片與上輻射貼片組成的大貼片,其諧振單元長度和諧振頻率可以分別進行計算[20]:
Lcom=Lb+Lu-Lo
(2)
(3)
式中:Lcom是天線諧振方向上組合輻射貼片的長度;Lb是上輻射貼片長度;Lu是短接貼片長度;Lo是短接貼片與上輻射貼片的重疊長度。
由式(2)、(3),當天線的短接上貼片與矩形貼片天線發生相對位移時,天線的諧振頻率會對應發生變化。由于諧振頻率信息包含于天線背向散射信號中,可以采用諧振頻率對天線組件中的短接上貼片位移進行表征。當短接上貼片位移與結構加速度相關時,則可以通過諧振頻率進而表征結構加速度。
1.2.2 傳感器節點封裝設計
將傳感器節點進行封裝,如圖4所示。圖4(a)為節點封裝示意圖,通過增加質量塊和彈簧,將節點封裝為一個單自由度振動系統,具體實現方案可如圖4(b)所示。當傳感器如圖4(c)貼置于結構上,當結構發生振動時,由于共振效應,短接上貼片與矩形貼片天線之間的重合長度,將會隨傳感器敏感軸方向的加速度變化而逐漸變化,進而改變傳感單元的諧振頻率。
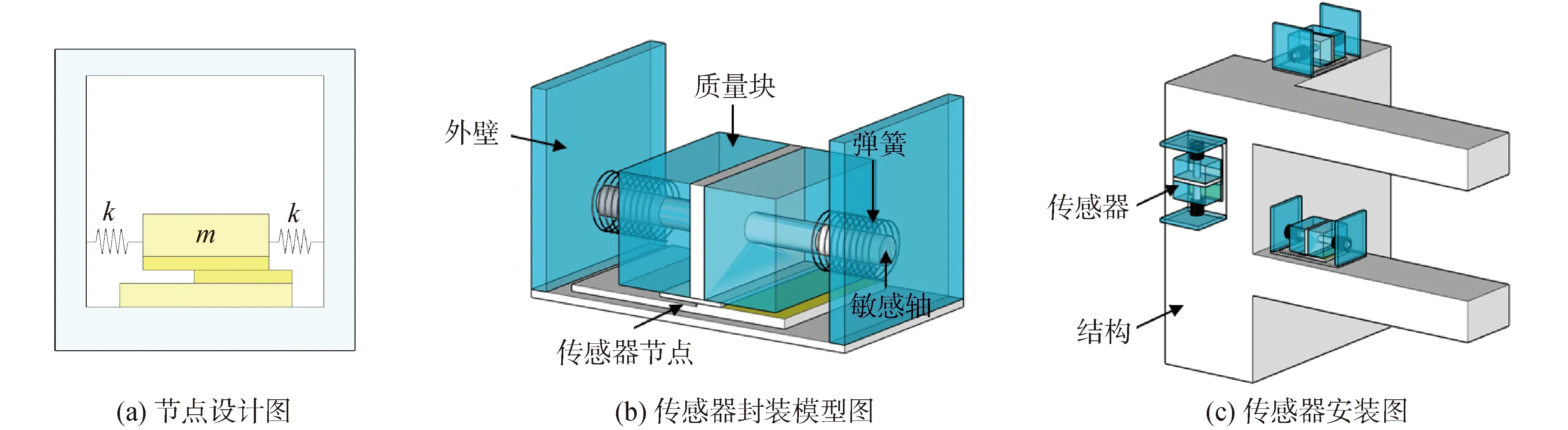
圖4 傳感器設計示意Fig.4 Concept of the patch antenna acceleration sensor
假定短接上貼片質量為m,2個彈簧串聯總剛度為0.5k,摩擦阻尼為cf,框架振動瞬時位移為xs,加速度計內質量塊m相對位移為y,則短接上貼片的運動方程為:
(4)
假定下部框架進行簡諧運動:
xs(t)=x0eiωt
(5)
式中:x0為下部框架簡諧振動峰值;ω為下部框架固有自振圓頻率。

(6)
式中Rd為傳感器動力放大系數,其值為:
(7)
(8)
由式(8)可知,傳感器諧振頻率理論上與加速度峰值存在固定函數關系,因此,可以通過傳感器的諧振頻率對下部框架的加速度進行表征。
1.3 數據采集后處理終端
經由FMCW信號發生系統發射,加速度傳感器吸收并背向散射,最終由寬帶天線收集并送往數據采集后處理終端的電磁波信號,分別經過功率包絡讀取和與本振信號混頻,得到加速度傳感器的諧振頻率信息和位置信息。在本節中,介紹了通過處理天線傳感器背向散射信號,得到諧振頻率和位置的方案。
1.3.1 傳感器諧振頻率測定
在信號讀取過程中,傳感器節點中的天線可以吸收空氣中的電磁波信號并轉化為電路電信號。入射電磁波總功率Pin中,部分功率損耗Pl,部分功率轉化為電路中的電信號功率Pe,部分功率轉化為背向散射功率Pb,并通過天線對外輻射。其關系為:
Pin=Pb+Pe+Pl
(9)
背向散射分為結構項散射和模式項散射,其中,模式項散射起控制作用[21]。天線的模式項散射與電磁波信號頻率有關,當天線諧振頻率與入射電磁波頻率達成匹配,入射電磁波功率最大化轉化為天線負載的工作功率,天線模式項散射功率最小。
天線傳感器經調頻連續波激勵時,其模式項散射功率在諧振頻率處達到最低值,因此,可通過記錄分析天線背向散射強度在調頻范圍內的相對變化來對加速度傳感器諧振頻率進行訪問,其最大訪問頻率為FMCW信號的信號頻率,訪問范圍為FMCW載波信號范圍。
1.3.2 傳感器距離測定
將FMCW信號發生系統發射的掃頻波和接收天線接收得到的傳感器背向散射回波送入混頻器中,進行混頻并得到差頻,可以得到傳感器位置信息,如圖5所示。
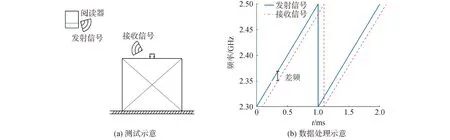
圖5 混頻及差頻示意Fig.5 Concept of frequency mixing and find frequency difference
差頻Δf為FMCW發射信號與回波信號頻率差,與發射信號和回波信號時間差Δt關系為:
Δf=(fup-flo)fseΔt
(10)
式中:fup是掃頻上界;flo是掃頻下界;fse是測量頻率。回波信號時間差Δt與距離d關系可以表示為:
(11)
因此,天線傳感器與閱讀器間距離表示為:
(12)
2 基于高頻結構仿真器和Matlab的仿真驗證
采用HFSS仿真軟件與Matlab對天線設計、雷達訪問和數據后處理進行初步仿真。其中高頻結構仿真器(high frequency structure simulator,HFSS) 用于初始天線設計、尺寸優化和不同重疊長度下組合式貼片天線的輸入阻抗計算。
2.1 參數設定
2.1.1 基于量程的封裝參數設計
通過將組合式天線進行封裝,實現對加速度傳感器節點的加速度訪問。加速度傳感器封裝主要參數為上短接貼片長度Lu,初始重疊長度Lor,彈簧勁度系數k,重疊長度的最大變化范圍ΔLmax和上覆質量塊質量m。為保證天線重疊長度變化不會對其收發性能造成影響,上短接貼片長度Lu定為上輻射貼片長度Lb的1/3,重疊長度的最大變化范圍ΔLmax定為上短接貼片長度Lo的1/3:
Lb=3Lu=9ΔLmax
(13)
根據式(6),待設計加速度傳感器的最大量程與重疊長度的最大變化范圍ΔLmax之間可表示為:
(14)

k=0.5m
(15)
假定傳感器質量塊自重1 kg,則傳感器彈簧剛度為500 N/m。
為保證加速度傳感器動力放大系數Rd近似收斂于1,需要對加速度傳感器內頻率與待測結構頻率比進行驗算[21]:
ω≤0.5ωac
(16)
其中ωac為傳感器固有自振圓頻率:
(17)
將傳感器計算參數值代入式(16)、(17),得到待測結構頻率范圍:
(18)
據文獻[22],一般建筑自振周期大于0.5 s,固有圓頻率小于10 rad/s,符合傳感器參數范圍。當應用于特種結構時,可以針對特種結構的固有頻率,對傳感器的封裝參數進行對應的優化設計。
2.1.2 基于HFSS的天線初始參數設計
在仿真前,采用HFSS對使用天線參數進行優化,模型如圖6所示。天線設計工作頻段為2.2~2.6 GHz(初始狀態約2.2 GHz),采用平面波饋電,平面波波源與天線之間距離為30 mm。天線輻射貼片和接地面采用perfect E邊界模擬金屬表面,天線基板采用RT5880介質材料,外邊界設置為完美匹配層 (perfect match layer, PML)吸收輻射邊界條件,模擬無限空間內的天線散射情況。
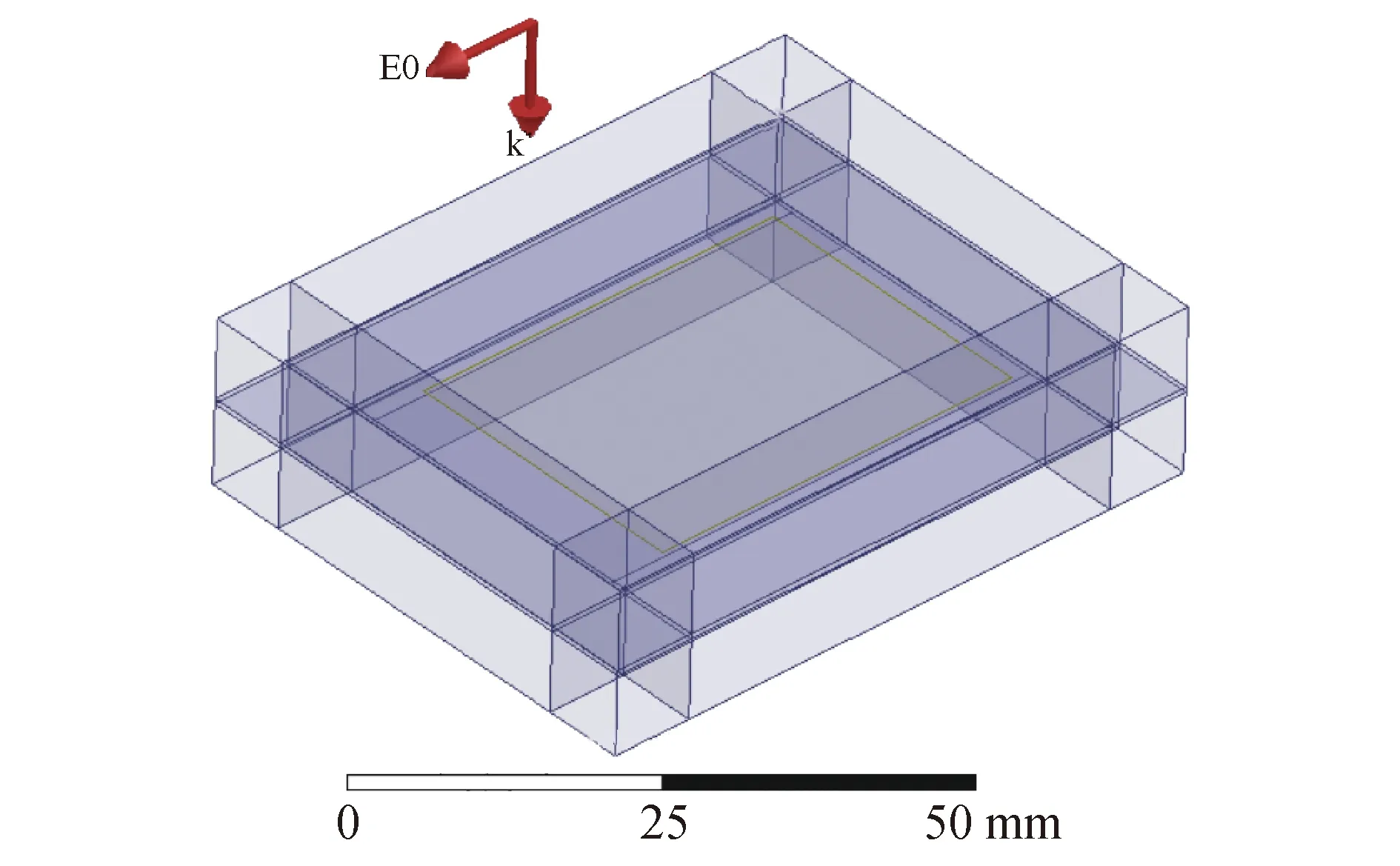
圖6 HFSS中模型示意Fig.6 Concept figure of the model in HFSS
以最優化阻抗匹配為目標進行優化后,加速度傳感器基本參數如表1所示。
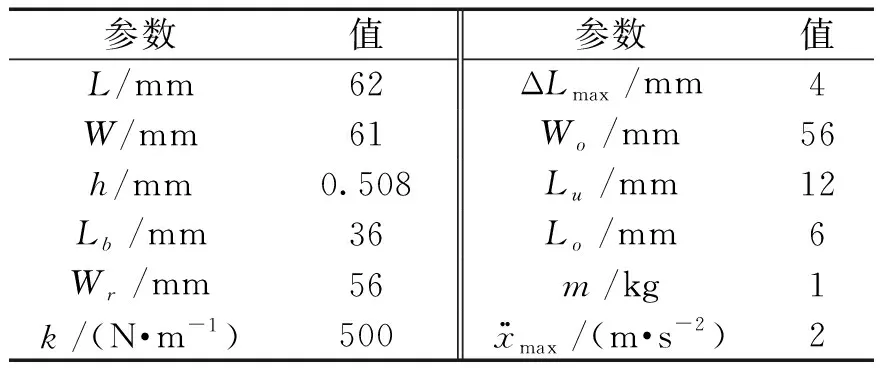
表1 加速度傳感器基本參數表Table 1 Basic parameters of the acceleration sensor with overlapped sub-patch
在該參數下,初始狀態加速度傳感器雷達截面面積(radar cross-section,RCS)曲線如圖7所示。在初始諧振頻率(2.22 GHz)下,天線RCS由10 dBm縮減為-12 dB·m。因此,可以認為天線匹配程度良好,傳輸能力適合作為傳感器節點進行使用。
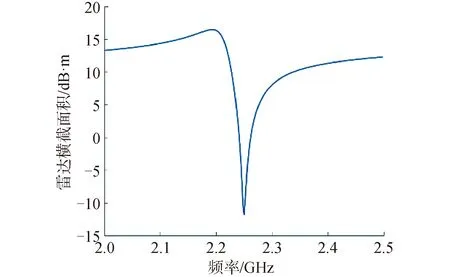
圖7 初始狀態天線傳感器RCS曲線Fig.7 RCS curve of the patch antenna acceleration sensor
2.1.3 基于Matlab-HFSS的仿真驗證方案
基于天線散射原理,在Matlab和HFSS中進行了基礎的仿真驗證。
對于傳感器節點,首先,根據固定加速度激勵,計算得到不同時刻傳感器重疊長度Lo,以此對天線傳感器進行重構。參照地震激勵,加速度激勵選擇采用固有圓頻率5 rad/s、最大振幅為2 m/s2的簡諧振動。
對于信號收發單元,首先,在Matlab中生成初始功率為1 dB·m,循環頻率為100 Hz,震蕩區間為2~3 GHz的FMCW信號,并假定信號通過增益對頻率不敏感、各向方向性相同的超寬帶天線轉換為電磁波信號,并發射進入自由空間;隨后,通過自由空間損耗公式計算天線在自由空間傳播至待測傳感器處的功率損耗,并通過HFSS計算傳感器的瞬時輸入阻抗,計算得到傳感器的模式項散射;隨后,假定天線的結構項散射為常數,計算得到加速度傳感器的散射總場,并假定傳感器內部天線散射經過一個接收增益對信號頻率不敏感、各項方向性相同的超寬帶天線接收,得到天線傳感器的功率信息;接收信號隨后與原信號進行混頻,得到差頻,從而得到加速度傳感器的位置信息。傳感系統仿真設計框圖如圖8所示。
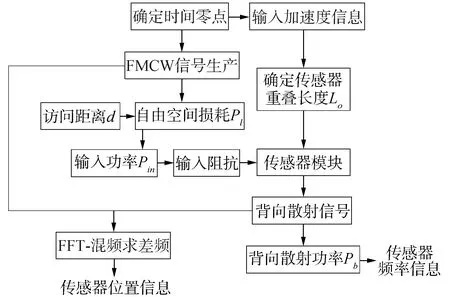
圖8 基于Matlab-HFSS的仿真框圖Fig.8 Block diagram of the acceleration sensing system
在仿真過程中,使用的參數設定如表2所示。
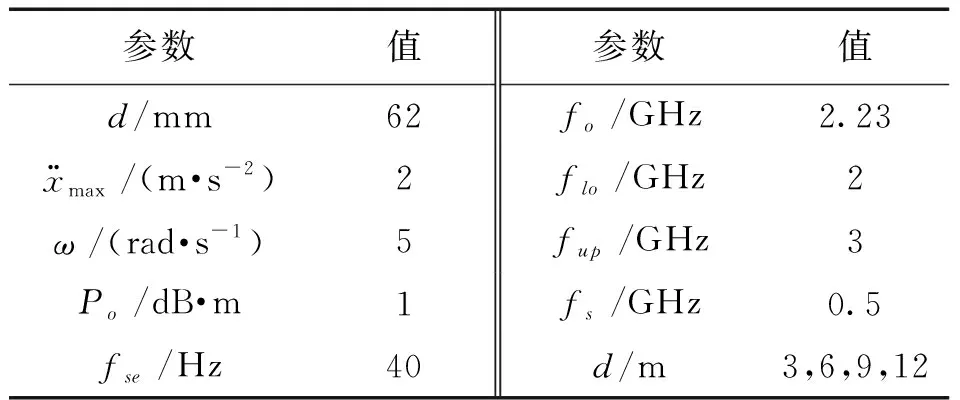
表2 Matlab仿真參數設定表Table 2 Setting parameters of the simulation in Matlab
2.2 仿真結果與分析
對仿真結果分別進行了處理,得到了待測數據的加速度響應和距離測定,并對誤差進行了對比分析和原因討論。
2.2.1 加速度響應測定
首先,模擬測定了加速度傳感器初始狀態下,當假想距離設定為3 m時,上覆貼片從初始位置開始,偏移量為-1 mm和偏移量為1 mm時的回波功率信息,進行希爾伯特變換提取包絡信息后,計算得到出對應的諧振頻率,如圖9所示。
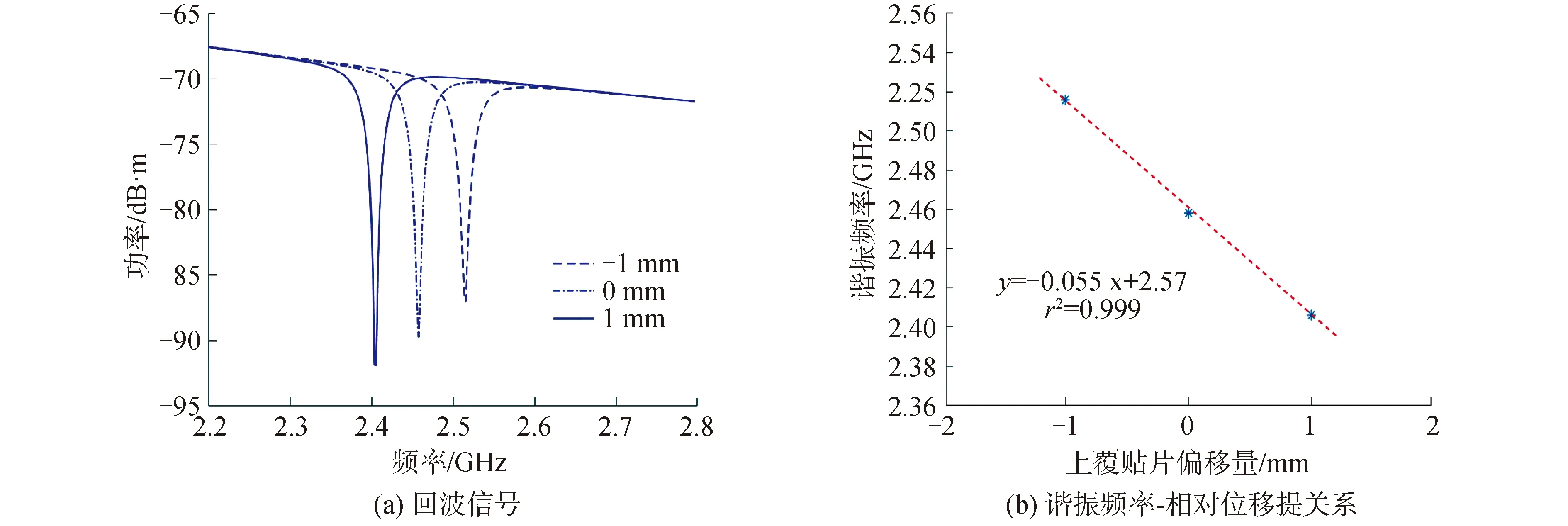
圖9 貼片天線偏移量初期標定結果Fig.9 Initial calibration results of the antenna sensor
計算得到加速度傳感器諧振頻率與相對位移變化關系:
(19)
通過計算得到了2 s內,貼片天線回波信號功率隨時間的變化關系,前0.1 s內數據節選如圖10(a)。提取每個周期內,回波信號功率的最小值,得到各個周期貼片天線諧振頻率變化關系,如圖10(b)所示。
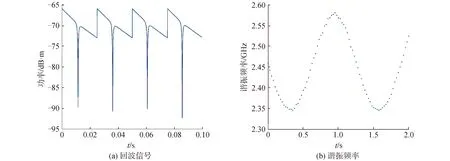
圖10 貼片天線回波信號Fig.10 The backscattering signal
由2.1節,近似認為諧振頻率與短接貼片重合長度成線性關系。將諧振頻率代入式(19),求的相對位移后,將上覆介質的移動距離代入式(8),得到下部框架的加速度響應,如圖11所示。
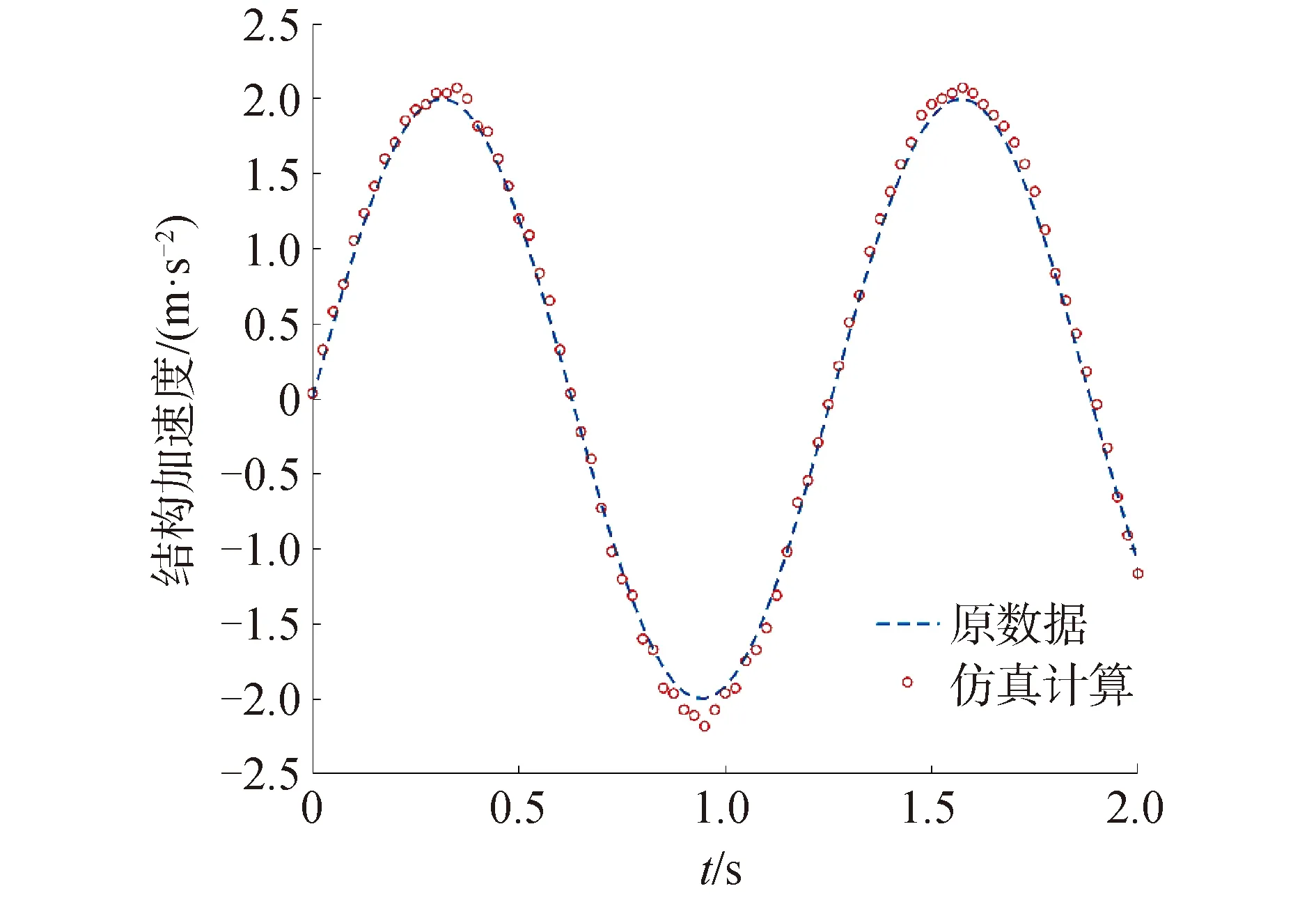
圖11 加速度測定結果Fig.11 Measurement results of the acceleration
對每個散點進行相對誤差計算,如圖12所示。
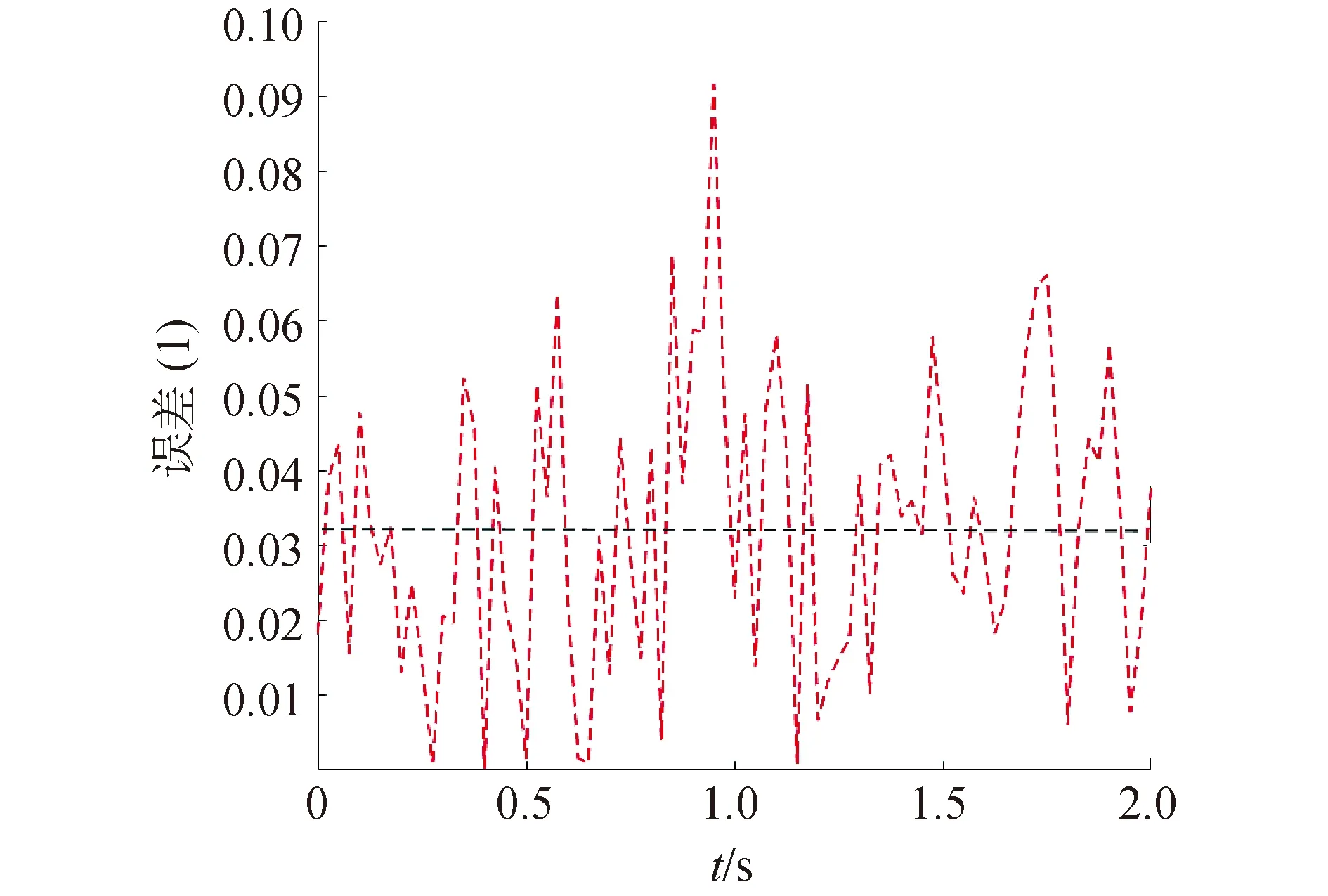
圖12 相對誤差Fig.12 Relationship between error and time
最終平均誤差為3.24%,符合加速度計測試要求。
2.2.2 距離測定
將2.2.1節中的回波信號與原信號進行混頻,得到的信號再次進行離散傅里葉變換,假定距離為3、6、9和12 m的差頻測定如圖13所示。
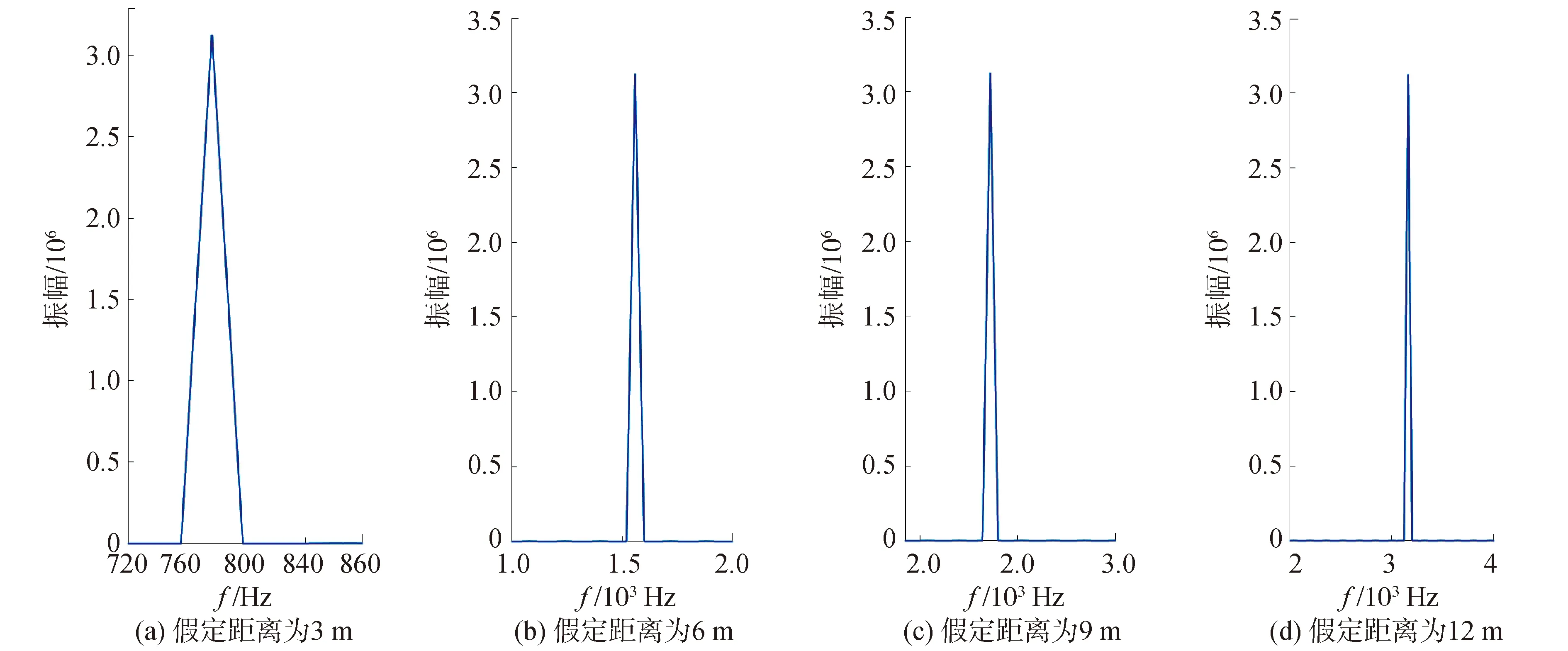
圖13 回波信號差頻Fig.13 Different frequency of backscattering signal
依照式(12),加速度傳感器與閱讀器之間的距離和相對誤差如表3所示。
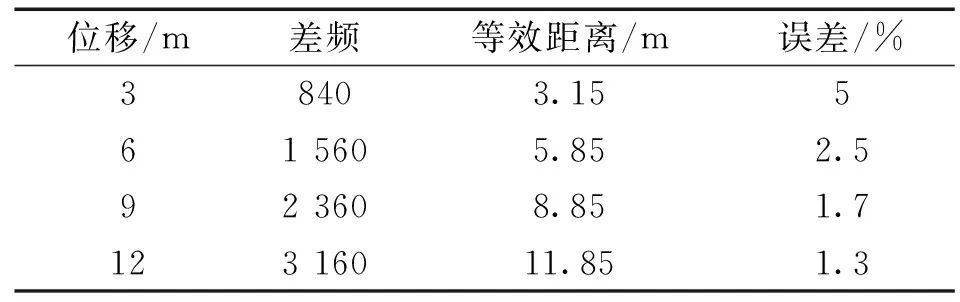
表3 傳感器距離測定結果Table 3 The displacement testing result by the accelerator
在FMCW系統中,測距誤差主要來源于測試頻段帶寬,基于采樣頻率造成的時間誤差Terrormax和測試距離誤差Derrormax:
(20)
Derrormax=cTerrormax=0.3 (m)
(21)
隨著天線傳感器與閱讀器之間距離的增大,相對采樣精度提高,誤差逐漸減小。在本文仿真中,測距的最大誤差為0.3 m,仍滿足土木工程領域大體的定位要求。在面向更高要求的定位設計時,可以通過提高采樣頻率,降低測試中的最大誤差。
3 結論
1) 基于帶短接單元的貼片天線,提出了一種無源無線加速度傳感器節點和封裝的設計方案,并基于給定量程給出了傳感器的尺寸設計方案。傳感器的工作頻帶與貼片天線的尺寸相關,傳感器的測試量程與質量塊質量和彈簧剛度相關,因此,該方案可適用于任意給定工作頻帶和量程的加速度傳感器設計。
2) 基于FMCW雷達原理,設計了提出傳感器的訪問方案,并對應采用HFSS-matlab仿真軟件進行了驗證。在設計中,加速度傳感器的諧振頻率經由天線的背向散射波被FMCW雷達監測得到,并進一步用于結構加速度表征。在仿真中,采用簡諧波激勵作為輸入加速度對系統進行了測試,其加速度測試的平均誤差為3.24%。
3) 基于差頻原理,對提出的傳感器進行了定位功能設計,其距離分辨率與采樣頻率成正比。在采樣頻率為500 MHz時,距離分辨率為0.3 m,可以滿足土木工程監測中的一般要求。另外,當有特殊要求時,可以通過增大采樣頻率,得到更高的距離分辨率。
今后研究中,有下列工作待完成:
1) 目前尚未對加速度傳感器進行細部的參數優化和和溫度效應測定。在進一步的工作中,將優化質量塊材料、彈簧細部參數和封裝設計,并研究對應的溫度效應補償機制。
2) 在充分優化傳感器節點和封裝設計后,擬制作加速度傳感器實物,在實驗室和工地分別進行加速度測定試驗和定位試驗,觀察和進一步優化傳感器設計,提高傳感器性能。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06