
一種長航時太陽能無人機能量管理策略
2023-02-18 08:12:20蘇圣昊
科技創新與應用 2023年3期
關鍵詞:系統
王 浩,蘇圣昊
(中國飛行試驗研究院,西安 710089)
長航時太陽能無人機供配電系統由2 種不同的電源和3 種不同的負載組成,不同電源之間的動態特性、能量密度和功率密度等參數均不同,不同的負載動態響應也不同。如何分配不同種類的電源和同種電源組間瞬時功率和平均功率匹配不同負載的突變,使系統有較高的效率、穩定性和經濟性,以及延長電源的使用壽命,是無人機供配電系統的主要目標。
Shiau 等[1]針對小型無人機的太陽能管理系統進行了設計,該架構適用于低功率場景的無人機,不適用于高空長航時太陽能無人機這樣結構的高功率系統。Lawhorn 等[2]針對分布式推進的混合動力太陽能飛機架構進行研究,包括太陽能電池、蓄電池、分布式推進電機和電源變換系統。提出了一種各個模塊的控制方案。這種架構只考慮了推進系統為分布式分布,光伏和蓄電池都是集中式分布。
Lee等[3]針對使用太陽能電池,燃料電池和電池組作為電源的200 W級、低速、長壽命太陽能無人機進行了一種基于規則的主動電源管理方法的研究。Zhang等[4]針對由太陽能和氫能構成的混合動力機型,研究了混合能源動力無人機重量和能量之間相關聯的仿真模型,并結合無人機的實際飛行剖面進行優化管理。Wang等[5]使用最優控制原理優化全電動飛機在巡航階段的效率,該研究將飛機推進系統和電池電量耦合,在起點和終點相同的情況下,以電池電量最小作為優化目標,對飛機進行航跡規劃。Han等[6]針對光伏/氫/電池混合直流微電網,提出了一種分層能源管理策略,包括本地控制層和系統控制層。在本地控制層中,包括最大功率點跟蹤控制和下垂控制。系統控制層采用了等效消耗最小策略,實現了光伏、氫燃料電池和電池之間的功率分配。Keerthisinghe等[7]針對地面家庭微網,提出了一種評估住宅光伏發電和需求模型的方法,該方法可以根據歷史數據采用深度學習技術預測光伏發電功率和負載需求。Manickavasagam等[8]針對具有太陽能電池、風車、燃料電池和柴油發電機船舶系統提出了一種基于模糊邏輯控制的能量管理系統。
綜上所述,在長航時太陽能無人機分布式架構設計、分布式控制、電推進負載功率需求及能量管理相結合的研究較少,有待于對這類研究提出系統性的解決方案,滿足未來長航時太陽能無人機的能量需求。本論文對長航時太陽能無人機進行研究。設計了由4 套供電單元構成的分布式供電系統架構及3 種不同負載的配電系統架構,隨后對長航時太陽能無人機供配電系統建模,結合無人機設定的飛行工況,采用了一種基于分層控制架構的能量管理策略,并進行仿真驗證。
1 長航時太陽能無人機供配電系統架構設計
長航時太陽能無人機供配電系統的架構分為供電系統和配電系統。供電系統分為4 個分布式的供電單元,分別對應長航時太陽能無人機的左前翼、左后翼、右前翼和右后翼4 個供電單元。每個供電單元都是一個具備自調節能力的智能體,每個智能體分別由太陽能電池板、MPPT 控制器、電池組和電池管理控制器4 個模塊組成。配電系統分為任務載荷、航空電子設備和電推進負載。航空電子設備在白天和夜晚的需求功率大致相同,載荷所需功率在白天和夜晚不同,飛行剖面動力功率會隨飛行剖面而變化。在長航時太陽能無人機能夠完成每天任務的條件下,為了延長無人機的滯空時間、穩定性、部件的壽命及系統可靠性,必須設計一套與長航時太陽能無人機供配電系統相匹配的能量管理策略。由于供電系統具有多個供電單元,每個供電單元的輸出功率都必須受到嚴格的控制,防止某一供電單元輸出功率過大,影響部件壽命。輻射強度在一天之內變化很大,這就導致了太陽能電池在一天之內的輸出功率變化也很大。當太陽能電池輸出功率高于負載功率時,需要電池組存儲剩余的能量;當太陽能電池輸出功率不足時,需要電池釋放能量。怎樣合理的利用和存儲太陽能電池產生的能量也是能量管理策略需要考慮的問題。基于此,本文采用了基于分層控制架構的能量管理策略進行研究,分層控制架構可以劃分為頂層控制和底層控制這2個層次,控制構架圖如圖1 所示。

圖1 長航時太陽能無人機分層控制架構圖
頂層控制為系統級控制,主要作用是對長航時太陽能無人機供配電系統進行能量管理,確定各供電單元變換器工作方式,保證整個無人機供配電系統的能量平衡,為底層控制器提供長航時太陽能無人供配電系統的工作模式,提高無人機供配電系統的可靠性和穩定性。
底層控制為設備級控制,主要作用是對每個供電單元進行功率控制,在各個供電單元內部完成控制,本地控制器主要作用是維持母線電壓。對于電池管理控制器,底層控制為直流母線電壓控制和充放電控制;對于MPPT 控制器,底層控制作用是維持母線電壓或使太陽能電池處于MPPT 模式。
2 頂層控制
頂層控制需要對長航時太陽能無人機供配電系統進行能量管理,能量管理的目標為延長無人機的滯空時間,延長部件的壽命,增強系統的穩定性及提高系統的可靠性。合理地利用和存儲太陽能電池產生的能量是延長無人機滯空時間的主要方法,根據長航時太陽能無人機執行一天飛行任務電池剩余電量可以判斷無人機的滯空時間。電池組的壽命也會影響長航時太陽能無人機滯空的時間,良好的充放電策略可以延長電池的使用壽命。系統各狀態之間的平滑切換可以保證系統的穩定性。合理分配和控制各供電單元的輸出功率可以提高系統的穩定性。
本文使用了一套基于6 狀態的規則式能量管理策略,工作區間的劃分和區間內的執行規則如圖2 所示,其中輸入參數為太陽能電池組的輸出功率PPV、負載的功率Pload和電池組的電量SOC。輸出參數為太陽能電池和電池組的狀態,太陽能電池的狀態為恒壓模式PVvoltage、最大功率點跟蹤模式PVMPPT和斷開模式PVoff,電池組狀態為恒流充電模式Baticharge、恒壓恒功率比充電模式Batvcharge、恒壓恒功率比放電模式Batdischarge和斷開模式Batoff。
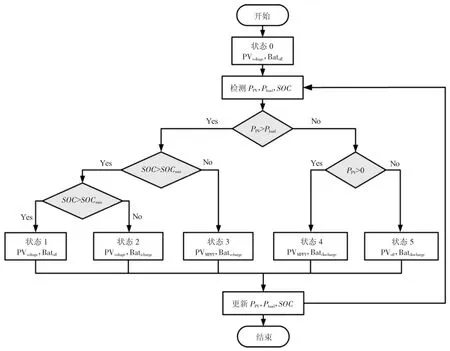
圖2 規則策略流程圖
各狀態說明如下。
狀態0:起始狀態,電池組處于斷開狀態,負載處于斷開狀態,太陽能電池處于恒壓模式,母線電壓由MPPT 控制器維持在270 V。
狀態1:電池組處于斷開狀態,負載隨飛行剖面變化,太陽能電池處于恒壓模式為負載提供能量,母線電壓由MPPT 控制器維持在270 V。
狀態2:電池組處于恒流充電狀態,負載隨飛行剖面變化,太陽能電池處于恒壓模式,母線電壓由MPPT控制器維持在270 V。
狀態3:電池組處于恒壓恒功率比充電狀態,負載隨飛行剖面變化,太陽能電池處于最大功率跟蹤模式,母線電壓由電池管理控制器維持在270 V。
狀態4:電池組處于恒壓恒功率比放電狀態,負載隨飛行剖面變化,太陽能電池處于最大功率跟蹤模式,母線電壓由電池管理控制器維持在270 V。
狀態5:此狀態為夜晚狀態,電池組處于恒壓恒功率比放電狀態,負載隨飛行剖面變化,太陽能電池處于斷開模式,太陽能電池停止發電,母線電壓由電池管理控制器維持在270 V。
3 底層控制
3.1 太陽能電池控制
太陽能電池將工作在斷開模式、恒壓模式和最大功率點跟蹤模式。當系統處于狀態5 時,無人機在夜間巡航,太陽能電池處于斷開模式。當系統處于狀態1 和狀態2 時,太陽能電池輸出的最大功率大于負載功率和充電功率的總和,太陽能電池處于恒壓模式,母線電壓由MPPT 控制器維持在270 V。當系統處于狀態3 和狀態4 時,太陽能電池處于最大功率點跟蹤模式,母線電壓由電池管理控制器維持在270 V。
本文將使用模糊邏輯在太陽能電池最大功率點追蹤的過程中,實時修改系統的仿真步長。典型模糊推理系統的結構如圖3 所示,將輸入參數模糊化后通過模糊系統中進行計算,將計算結果去模糊化后作為輸出參數。模糊邏輯控制器的按照“模糊化—建立推理規則—確定推理方法—去模糊化”的順序進行設計[9]。

圖3 模糊邏輯系統推理結構
3.2 電池組控制
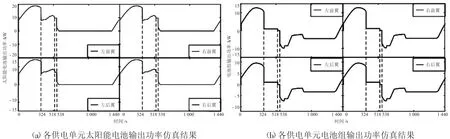
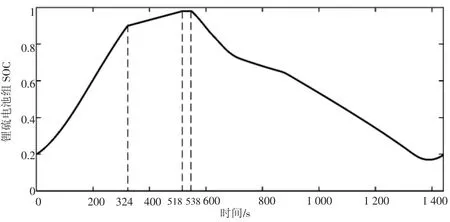
電池組將工作在斷開模式、恒流充電模式、恒壓恒功率比充電模式和恒壓恒功率比放電模式。當系統處于狀態1 時,PPV>Pload,電池SOC 大于98%,電池組斷開。當系統處于狀態2 時,PPV 長航時太陽能無人機供電系統的電池管理控制器根據主、從的功能分為2 種。主控制器的功能是穩定母線電壓,不會對電池的輸出功率進行控制;從控制器的功能是根據主控制器的輸出功率控制與其對應的電池的輸出功率,不會對母線電壓進行控制。因為主控制器的功能是維持母線電壓,輸出功率較大的供電單元對母線電壓的控制具有主導作用。因此,選擇左前翼電池管理控制器作為無人機整個供電系統的主控制器,左后翼、右前翼和右后翼電池管理控制器作為無人機供電系統的從控制器。 在Matlab/Simulink 上搭建整個長航時太陽能無人機供配電系統的主電路模型,長航時太陽能無人機供電系統由左前翼、左后翼、右前翼和右后翼4 個供電單元組成,每個供電單元分為太陽能電池陣、MPPT 控制器、電池和電池管理控制器。負載分為固定負載和電推進負載,固定負載由綜合航空電子設備和任務載荷單元組成。 將長航時太陽能無人機進行一天的飛行任務縮比到1 440 s(24 min),任務的起始時間早上八點,此時電池的SOC 設置為20%,整個任務持續到第二天的早上八點截至。頂層采用基于規則的能量管理策略,底層控制采用基于模糊的變步長擾動觀測法和主從控制,長航時太陽能無人機供配電系統飛行1 440 s 的仿真結果如圖4、圖5 所示。 圖4 各供電單元太陽能電池和電池組輸出功率仿真結果 圖5 電池SOC 仿真結果 在系統的運行過程中,母線電壓始終穩定在270 V,保證了供配電系統的穩定性;4 個供電單元的功率輸出比保持在4∶3∶4∶3,保證了供配電系統的可靠性;電池組嚴格按照充放電策略運行,電池組的SOC 大于10%,沒有進入深度放電,延長了系統部件的壽命;系統運行結束時,電池組SOC 維持在20%與系統設置的初始值相同,合理利用和存儲了太陽能電池產生的能量,延長了無人機的滯空時間。 本文采用了一種基于分層控制架構的能量管理策略,分為頂層控制和底層控制。頂層控制實現無人機供配電系統的能量調度、多種運行模式間的平滑切換的功能,設計了一種基于規則的能量管理策略。底層控制維持母線電壓,包括太陽能電池的控制和電池組控制。太陽能電池最大功率點跟蹤算法采用了基于模糊控制的擾動觀察法。電池組充放電控制采用了主從控制。結合長航時太陽能無人機的飛行工況,對系統進行了數字仿真驗證,證明了能量管理策略的正確性和有效性。4 仿真設計
5 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
